双经纬仪标定幕面方程的优化*
2018-04-10马静宜倪晋平武志超
马静宜,倪晋平,武志超
(西安工业大学 陕西省光电测试与仪器技术重点实验室/光电工程学院,西安 710021)
射击立靶密集度[1]是评价弹道武器系统性能的主要特征参量之一[2],可由射击的弹丸着靶坐标计算得到.在兵器靶场中,现多采用天幕立靶测量装置测量射击弹丸的着靶坐标[3],其测量原理为根据光幕平面方程与弹丸穿过光幕中心面的时间推算得弹丸着靶坐标[4],时间可由测时仪精确测量,其测量误差可忽略.因此,影响测试精度的关键在于各个光幕平面方程标定的精确性.天幕立靶投射出的光幕面具有人眼不可见的特点,对于不可见光幕的标定方法主要有双经纬仪法[5]、象限仪法[6]和三坐标测量机法[7].文献[5]中所述的双经纬仪前方交汇测量模型,具有定向简单,测量方法易于实现,精度高等优点,可实现对光幕面上点的坐标值确定[8],拟合多点得到光幕平面方程.文献[6]结合重锤调整天幕立靶一个幕面垂直,让象限仪紧靠在与调整的铅垂幕面平行的天幕立靶外壳上,旋转天幕立靶,并调整另外一个幕面铅垂,旋转得到两个幕面的夹角,再结合幕面的法向量,可求解出光幕平面方程.但象限仪的测角精度、幕面的垂直均会对幕面方程的精确标定有影响.文献[7]中所述方法测量精度高,但其测量速度慢,效率低,且机械探针易划伤待测物面,对柔性物体测量时存在很大误差,难以将其应用于无形光幕的标定.
采用双经纬仪前方交汇测量模型标定天幕立靶光幕面的方法有传统标定方法和非拆卸式标定方法[6,9].文献[6]中提到了传统标定方法.传统标定方法为相距一定距离布置双经纬仪,采用辅助挡板接收投射出的光幕,人为确定光幕条中心线,激光瞄准中心面上三个中心点,从而得到光幕平面方程.由于存在人为误差,不能够准确的标定出光幕平面.文献[6,9]中介绍了非拆卸式标定方法,根据频闪小光源作用在天幕立靶或天幕靶上输出信号的阶跃变化,获得光幕上三个空间点坐标,从而得到光幕平面方程.由于上述两种方法均未考虑双经纬仪的合理布局与精确标定基线两方面,致使标定的光幕平面精度不高.
本文采用双经纬仪标定光幕平面方程,分析双经纬仪的合理布局与基线的精确标定方法,提高光幕平面方程的标定精度,从而提高天幕立靶测量密集度参数的精度.
1 双N形六光幕阵列天幕立靶测量系统
1.1 测量原理
双N形六光幕阵列天幕立靶测量系统的结构如图1所示,光幕面依次为:G1,G2,G3,G4,G5,G6.坐标系的建立如图1所示,O1,O2分别为靶1、靶2三个光幕的交点,两点间的距离为S,选取O2作为坐标原点,O1与O2的连线方向为X轴方向,Z轴与Y轴的方向如图1所示.

图1 天幕立靶空间光幕分布示意图
当弹丸飞过多光幕天幕靶的探测视场时,依次穿过空间中的六光幕,两台天幕靶依次输出六个弹丸模拟信号,经弹丸信号采集仪采集并处理,得到弹丸依次穿过六个光幕的时刻值t1,t2,t3,t4,t5,t6,再结合光幕阵列的光幕平面方程,可求解出(x1,y1,z1,Vx,Vy,Vz)六个未知数,如式(1)所示.

(1)
式中:Ai,Bi,Ci,Di为光幕平面方程的坐标系数(i=1,2,…,6),[Vx,Vy,Vz]为弹丸速度在X,Y,Z坐标轴上的分量,(x1,y1,z1)为弹丸穿过第一个光幕面M1的点坐标,s为靶距.
由(x1,y1,z1,Vx,Vy,Vz)可计算得到弹丸在测量坐标系下的着靶坐标(x,y,z)、俯仰角、方位角以及速度值,因而采用天幕立靶测量装置一次射击可得到的弹道俯仰角和方位角、弹丸速度和着靶位置.时间可由测时仪精确测量,其测量误差可忽略.因此,影响测试精度的关键在于各个光幕平面方程标定的精确性.
1.2 传统标定幕面方程的方法
传统标定天幕立靶幕面方程的方法为相距一定距离布置双经纬仪,在天幕立靶壳体内放置白炽灯使光线透过狭缝与镜头向外投射得到光幕,采用辅助挡板接收光幕,人为确定光幕中心面,采用激光瞄准光幕中心面上的三点,拟合得到幕面方程.
采用激光对瞄,由于激光点太亮并且投射至辅助挡板时不一定为圆形,人眼不易观察两激光点的重合会影响测点精度,可采用双经纬仪十字叉丝替代激光对瞄,提高测点精度;人为确定光幕中心面,由于人为因素会影响标定精度,可设计专用的光幕接收装置接收光幕,达到精确识别光幕中心面目的;采用三点拟合平面法,会使每个测量点的测点精度均对幕面方程的精度有较大的影响,可采用最小二乘多点拟合法,较容易地提高幕面方程标定的准确性;未考虑双经纬仪的合理布局与基线的精确标定对双经纬仪测点精度的影响,并查阅大量文献得知,应用于天幕立靶幕面方程标定的双经纬仪测量方法的优化未被提及过,因此,本文从双经纬仪的合理布局与基线的精确标定入手优化.
2 双经纬仪标定幕面方程的优化
2.1 双经纬仪合理布局
2.1.1测量模型
定义测量空间为长为a、宽为b、高为c的立方体,并定义立方体左前下角点为D(x0,y0,z0).当立方体长宽高确定后,可由D点确定测量空间在双经纬仪测量坐标系中的位置,一旦D点坐标值改变,测量空间在坐标系中的位置随之改变.因此,首先需确定标定天幕立靶的测量空间大小.确定测量空间大小时,需将天幕立靶投射出的光幕面完全包含,如图2所示.根据光幕面参数,确定实际测量空间大小为a=1 700 mm,b=2 500 mm,c=2 000 mm.
2.1.2测量系统误差函数
采用双经纬仪空间前方交汇测量模型,原理如图3所示,求解点坐标其公式为:
(2)
式中:b为两经纬仪水平基线长度,αA,βA分别为经纬仪A的水平角与垂直角,αB,βB分别为经纬仪B的水平角与垂直角.
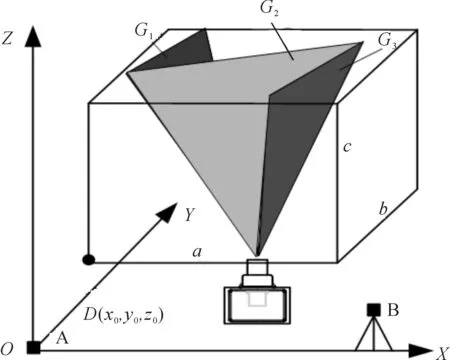
图2 实际测量空间示意图

图3 双经纬仪空间前方交汇测量原理图
分析式(2)可知,当基线确定后,其对所有测点的测量结果影响均相同,可认为是系统误差,因此,只考虑测角误差对测量精度带来的影响.对双经纬仪点坐标公式求导,并结合误差误差传播原理可得:
(3)
式(3)中的传递系数如下所示:
(4)
测量系统误差函数公式为:
(5)
分析上式可知:在测量空间内,不同的点相对应测量误差σ也不同.因此,测量误差σ是点坐标的函数.
标定天幕立靶的测量空间大小确定后,由式(2)分析可知,对于空间内同一点,坐标值随着基线b的改变而改变.分析测量空间模型可知,当D点坐标改变时,同一点的坐标值也随之改变.因此,当b、x0、y0、z0改变时,空间中的同一测量点坐标值不同,测量系统误差σ不同.因此,以b、x0、y0、z0为优化变量,定义优化布局参数组合P(b、x0、y0、z0).由于经纬仪明视距离,需避开盲区等条件的限制,变量优化范围确定为:b=1~9 m,x0=0.5~8 m,y0=0.5~4.5 m,z0=-0.5~1 m.在组合P一定时,寻找测量空间内测点最大值σmax,再从不同空间对应的σmax中寻找最小值.因此,优化目标函数为测量空间中各测点对应σ的最大值,其表达式为:
min{max(σ(x,y,z))∈D}
(6)
优化仿真过程:在优化布局参数组合P1一定的情况下,寻找测量空间内测量误差最大值σmax1;以一定步进得到组合P2及对应的测量误差最大值σmax2,判断组合P2是否达到边界,若未达到边界,则依据上述方法继续循环得到Pi及σmaxi,直至到达组合边界,结束循环.循环结束后可得到(P1,…,Pn)及(σmax1,…,σmaxn).在得到的测量误差最大值(σmax1,…,σmaxn)中,寻找最小值及其对应的布局参数组合.此时,通过全局仿真可得到基线长度与最优测量空间,其中双经纬仪的测角精度为0.5″.
依据上述优化过程,在参数变化过程中,寻找目标函数最优解,经过仿真得到最优布局组合是P(4.4 m、0.5 m、1 m、-0.5 m),则b=4.4 m,x0=0.5 m,y0=1 m,z0=-0.5 m.在优化得到的测量空间内,误差最大值为0.11 mm,对应点坐标为x=0.5 m,y=3.4 m,z=1.5 m.当z0的取值更小时,测量空间误差会更小.但由于天幕立靶置于地面时,本身仪器的高度为0.5 m,标定只需标定天幕立靶的光幕面,无需标定仪器本身.因此,根据天幕立靶壳体高度的限制,使得z0的最小取值在实际中只能取为-0.5 m.
2.2 双经纬仪基线的标定优化
双经纬仪交汇测量系统均采用独立线状约束条件,用经过更高精度的仪器标定的基准尺来定向基线长度.定向基线原理如图4所示,利用双经纬仪测量得到基准尺两端点的角度值,代入式(2)中求得坐标值,再将坐标值代入空间中两点距离坐标公式(7),可反解得到基线长度公式(8).
(7)
其中(x1,y1,z1)、(x2,y2,z2)分别为基准尺两端点的点坐标值.
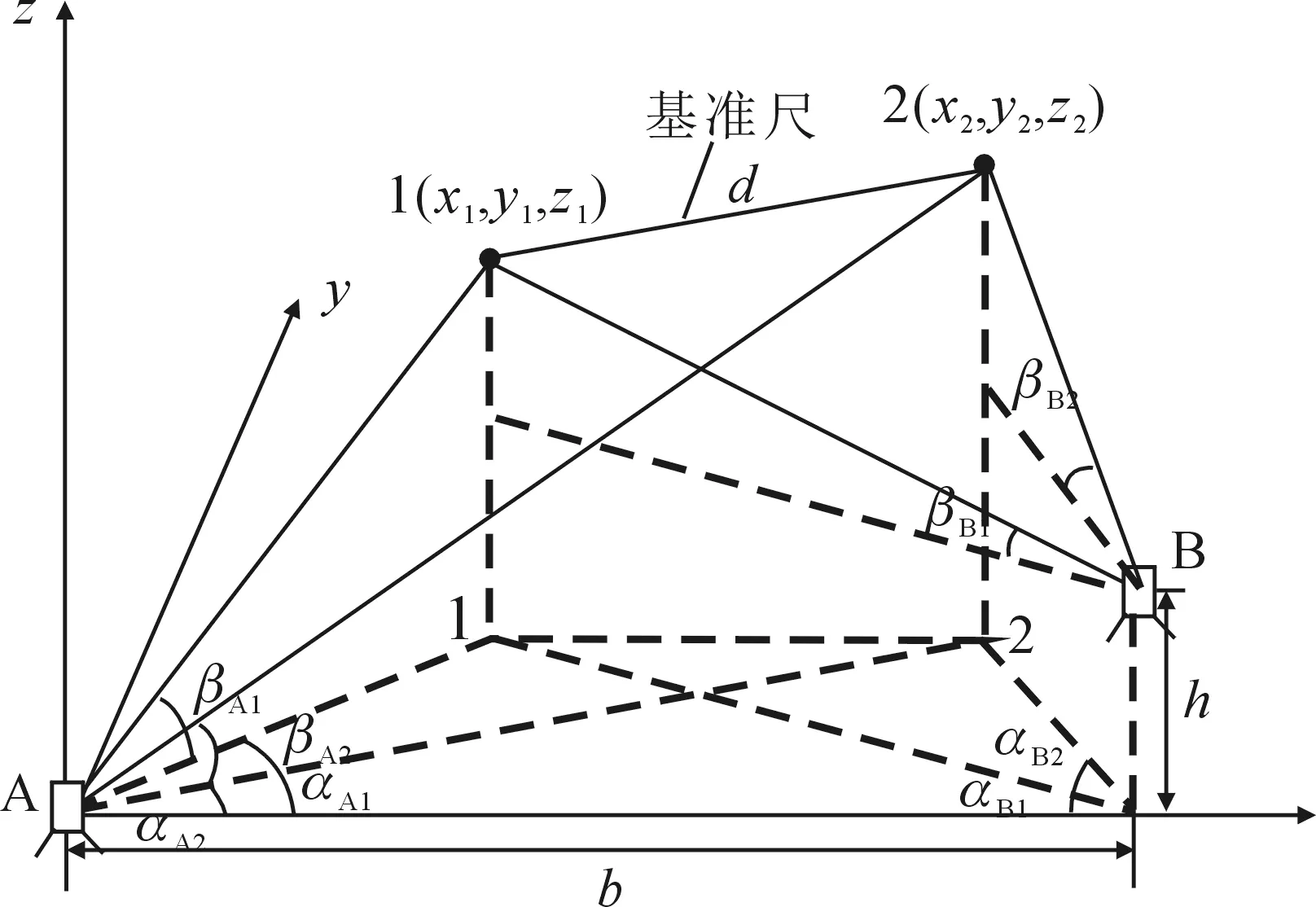
图4 求解基线原理图
(8)
式中:αA1,βA1,αB1,βB1为双经纬仪测量1点所对应的角度值;αA2,βA2,αB2,βB2为双经纬仪测量2点所对应的角度值.
根据误差传播原理得基线误差模型可得:

(9)
式中:σαA1,σαA2,σαB1,σαB2,σβA1,σβA1为经纬仪测角精度;σd为基准尺精度;σb为基线精度.
由于经纬仪测角精度由本身决定,分析基线误差模型可知,基线精度与经纬仪测得基准尺两端点的角度有关,角度可由坐标反解得到.因此,基线精度与基准尺两端点的坐标有关.以基准尺中心点作为空间放置点,可通过三角函数反解得到两端点坐标值,则将基准尺中心点坐标(xc,yc,zc)定为优化变量.寻找基准尺合适的位姿,以达到标定的基线误差最小这一目的,目标函数为基线误差最小,表达式为:
F=min(σb)
(10)
在三维测量最佳布局优化后的测量空间内摆放基准尺,以基准尺中心点作为空间放置点,寻求基线误差最小所对应的基准尺位姿.结合实际工程应用,理论分析基准尺放置为水平和垂直状态.
仿真条件:基线长度4.4 m;长为1 m的碳纤维基准尺(误差为0.01 mm);TDA5005电子经纬仪(角度误差0.5″).将连续的测量空间,按一定步进划分为离散空间,参量变化范围为:水平放置为xc=1 000∶200∶1 700;yc=1 000∶200∶3 500;zc=-500∶200∶1 500;垂直放置为xc=500∶200∶2 200;yc=1 000∶200∶3 500;zc=0∶200∶1 000.
1) 基准尺放置高度
在竖直平面内,仿真分析基准尺水平、垂直放置时,放置高度对基线精度的影响,仿真分析结果如图5所示.

图5 基准尺放置高度
分析可知,基准尺水平放置基线误差保持不变;垂直放置基线误差最大误差范围不超过0.02 mm,可忽略.因此,在本文的测量空间内基准尺放置高度对基线精度无影响.
2) 基准尺摆放位姿
在离散的xoy平面内,研究基准尺姿态固定,基线误差最小所对应的位置.基准尺水平放置仿真结果如图6所示,由仿真图可知:基准尺放置中间位置基线误差较小,最小数值为0.058 mm,相对应位置为x=1 000 mm、y=2 000 mm.基准尺垂直放置仿真结果如图7所示,由仿真图可知:测量空间左下方空间内基线误差较小,最小数值为0.055 mm,相对应位置为x=1 000 mm、y=1 000 mm.

图6 基准尺水平放置基线误差分布图Fig.6 Horizontal placement baseline error profile
通过分析可知,基线长4.4 m、基准尺长1 m时,基准尺垂直放置于测量空间x=1 000 mm、y=1 000 mm位置最优.
由于实验条件的限制,且随着基准尺长度的增加,线膨胀系数随之增大,会影响基准尺的精度.为了应用于实际,分析基准尺长度一定时,基线长度与基准尺最优位姿,具有工程参考价值.当基线长度一旦确定,可通过查表得知基线误差最小所对应的基准尺位置与姿态,见表1.

图7 基准尺垂直放置基线误差分布图

基线长度基准尺中心点坐标x/mmy/mm态150010001500水平200015001000水平250010001000水平300010001000垂直350010001000垂直400010001000垂直450010001500垂直500010001500垂直550010001500垂直600010001500垂直650010001500垂直700010001500垂直
3 试验验证及分析
为了验证优化后测量系统的精度,分别采用优化方法与传统方法分别标定天幕立靶.优化方法采用LED面光源作为光源,双经纬仪采用十字叉丝瞄准光幕条中心点,对于同一个投射光幕,最少选取相距较大的非共线的多点,记录这些空间点的经纬仪显示的俯仰角和方位角数值,通过经纬仪点坐标计算公式,可求解出对于同一个投射光幕上的多个空间点的坐标,利用最小二乘法拟合空间点,得到光幕平面方程.传统方法的双经纬仪采用激光对瞄光幕面上的点,且只选取三点计算得到光幕平面方程.完成标定后,进行实弹射击.其中优化方法标定光幕面时,基线长4.4 m,基准尺放置位姿与优化结果一致.优化与非优化的光幕阵列平面方程如式(11)所示.
(11)
天幕立靶测量坐标的计算[10]是将幕面方程与时间量代入式(1)中得到.实验数据见表2.
数据处理:采用散布中心法评估测量结果的好坏.首先,计算优化方法、非优化方法、纸靶坐标的散步中心分别为(76.3,68.7),(77.3,69.6),(77.2,69.1).以散布中心为基准,每次射击得到的坐标与散布中心做差,可以得到每发弹丸坐标相对于散布中心的偏离量,对比优化与非优化方法的偏离量,两者差值越小近则证明测量结果与纸板靶坐标测量结果越接近.用该方法分别处理表2中优化与非优化的数据,见表3.
试验结果分析:表3所示的Δz1、Δy1、Δz2、Δy2、Δz3、Δy3分别为每组测量值在横、纵坐标方向上与散布中心之差,表示着靶坐标与散布中心的偏离程度.对比每次射击弹丸坐标与散布中心的偏离量,通过δz1=Δz3-Δz1,δy1=Δy3-Δy1,δz2=Δz3-Δz2,δy2=Δy3-Δy2的计算结果可以看出,在优化方法的精度评估试验中,其测量的着靶坐标与纸板靶坐标在横坐标方向相差-3.0~1.7 mm,弹丸与散布中心横向偏离程度的标准差为1.7 mm;纵坐标方向相差-3.2~1.8 mm,弹丸与散布中心纵向偏离程度的标准差为1.9 mm.在非优化方法的测量精度评估试验中,其测量的着靶坐标与纸板靶坐标在横坐标方向相差-2.7~2.8 mm,弹丸与散布中心横向偏离程度的标准差为2.3 mm;纵坐标方向相差-2.7~4.9 mm,弹丸与散布中心纵向偏离程度的标准差为2.7 mm.通过分析,可知优化测量系统的弹丸着靶坐标更接近实际弹孔位置.
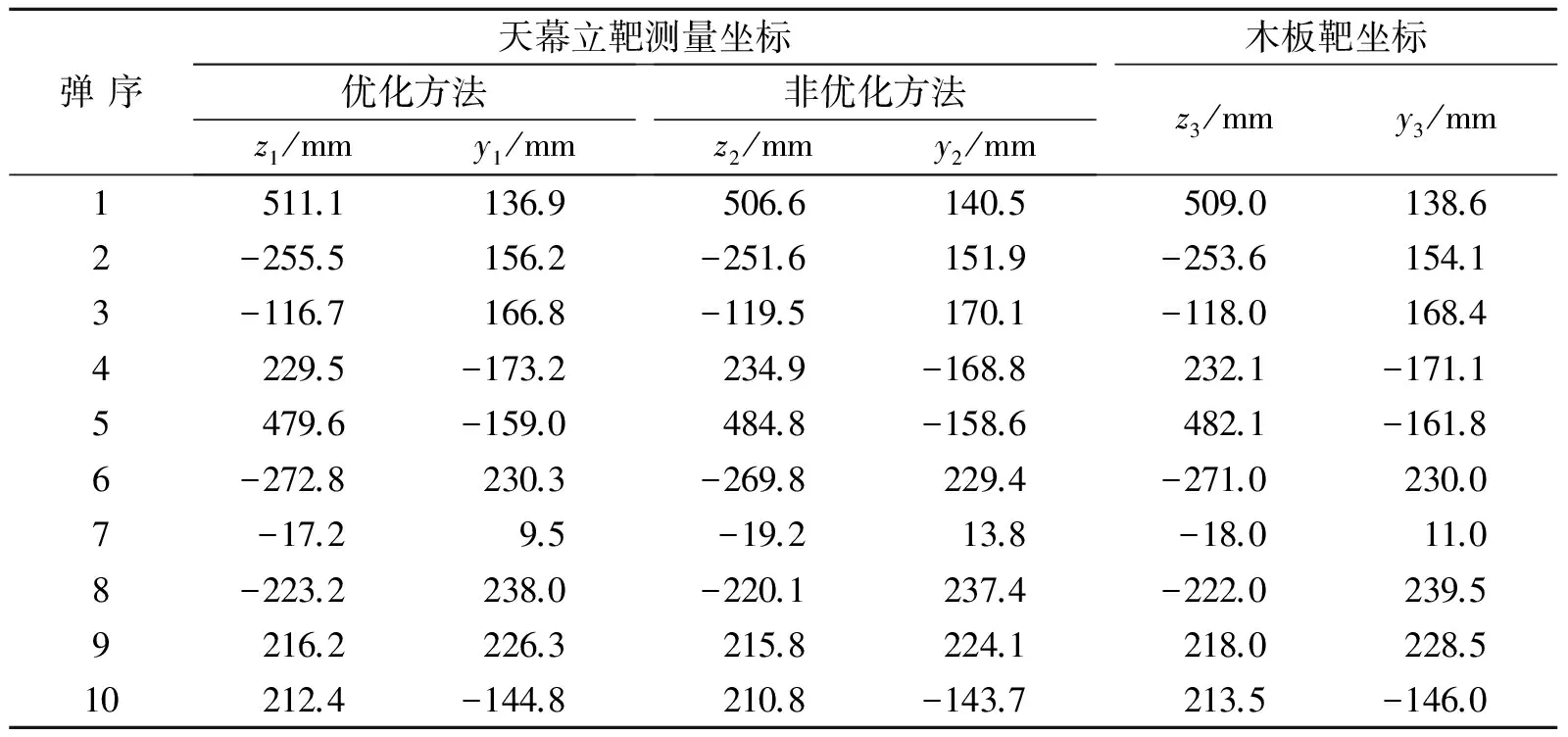
表2 部分枪弹试验数据
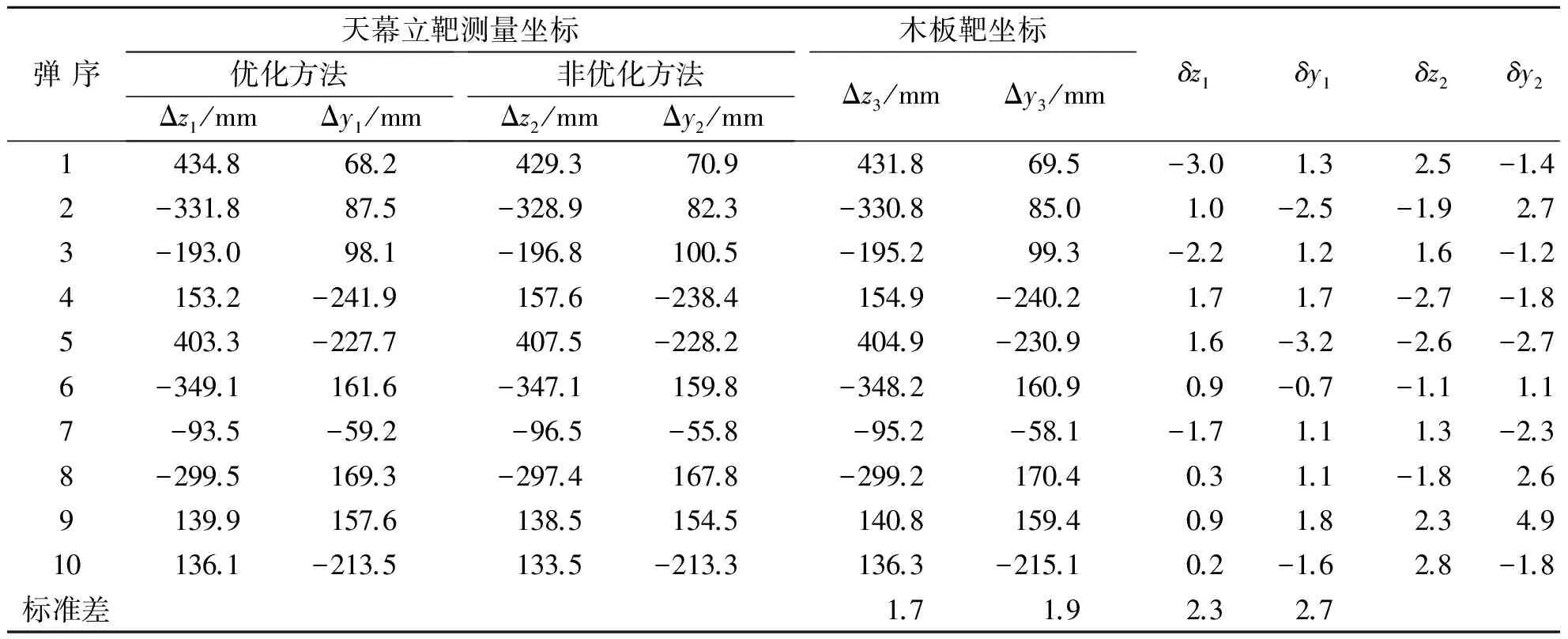
表3 散布中心法精度评估结果
4 结 论
本文针对双经纬仪的合理布局与基线的精确标定,建立了以测量空间中测点误差最大值函数为目标函数的测量模型,采用基准尺反解基线,建立了以基线误差函数为目标函数的基线优化模型,得到了合理布局和最佳基线所需的基准尺位姿.同时得到基线长度与基线误差最小所对应的摆放位姿表.实弹射击比对试验结果表明,弹丸与散布中心横向偏离程度的标准差为1.7 mm,纵向标准差为1.9 mm,优于非优化方法的标准差.光幕为具有一定厚度的区域,设计具有精确识别光幕中心面功能的光幕接收装置,有待进一步提高光幕平面方程的标定精度,从而提高天幕立靶测量密集度参数的精度.
参考文献:
[1]张兴社.对弹丸射击密集度指标的探讨[J].弹道学报,1989(2):27.
ZHANG Xingshe.A Study of the Fire Dispersion Index of Projectiles[J].Journal of Ballistics,1989(2):27.(in Chinese)
[2]宋玉贵,倪晋平,王铁岭,等.多光幕交汇法测量目标飞行坐标的原理与精度分析[J].西安工业大学学报,2007,27(1):19
SONG Yugui,NI Jinping,WANG Tieling,et al.Principle of Six Screens Target Measuring System for Bullet Location and Its Error Analysis[J].Journal of Xi’an Technological University,2007,27(1):19.
(in Chinese)
[3]倪晋平,辛彬,冯斌.室外用立靶密集度参数测量技术研究进展[J].西安工业大学学报,2013,33(4):259.
NI Jinping,XIN Bin,FENG Bin.Progress of Research on the Measuring Firing Accuracy and Dispersion in Outfield Test[J].Journal of Xi’an Technological University,2013,33(4):259.(in Chinese)
[4]杨飞.直线弹道模型天幕立靶结构参数反演技术[D].西安:西安工业大学,2016.
YANG Fei.Inversion Technique of Structural Parameters of Sky Screen Vertical Target under the Uniform Straight Trajectory Model[D].Xi’an:Xi’an Technological University,2016.(in Chinese)
[5]张滋黎,邾继贵,耿娜,等.双经纬仪三维坐标测量系统设计[J].传感技术学报,2010,23(5):660.
ZHANG Zili,ZHU Jigui,GENG Na,et al.The Design of Double Theodolite 3D Coordinate Measurement System[J].Chinese Journal of Sensors and Actuators,2010,23(5):660.(in Chinese)
[6]尚羽超.多光幕天幕立靶结构参数标定技术[D].西安:西安工业大学,2015.
SHANG Yuchao.Study on the Calibration Techniques of Structural Parameters of Multi-Sky-Screens Target[D].Xi’an:Xi’an Technological University,2015.
(in Chinese)
[7]赵必玉.高精度面结构光三维测量方法研究[D].成都:电子科技大学,2015.
ZHAO Biyu.High Accuracy Surface Structured Light Projection Three Dimensional Measurement Research[D].Chengdu:University of Electronic Science and Technology of China,2015.(in Chinese)
[8]周虎.基于视觉的目标跟踪与空间坐标定位系统研究[D].天津:天津大学,2011.
ZHOU Hu.Study on the Vision-Based Target Tracking and Spatial Coordinates Positioning System [D].Tianjin:Tianjin University,2011.(in Chinese)
[9]仵阳,武志超,倪晋平.测速天幕靶幕面空间位置检测方法[J].应用光学,2014(1):100.
WU Yang,WU Zhichao,NI Jinping.Method for Detecting Sky Screen Spatial Position in Flying Projectile Velocity Measurement[J].Journal of Applied Optics,2014,35(1):100.(in Chinese)
[10]田会,倪晋平,焦明星.抛物线弹道弹丸飞行参数测量模型与精度分析[J].仪器仪表学报,2016,37(1):67.
TIAN Hui,NI Jinping,JIAO Mingxing.Projectile Flying Parameter Measurement Model of Parabolic Trajectory and Precision Analysis[J].Chinese Journal of Scientific Instrument,2016,37(1):67.
(in Chinese)