七光幕阵列测试双管武器立靶密集度方法研究
2013-02-28倪晋平卢红伟田会
倪晋平,卢红伟,田会
(西安工业大学 光电工程学院,陕西 西安710032)
0 引言
双管武器是低空防御系统的重要组成部分,立靶密集度参数是其主要战术技术指标之一。在立靶密集度试验中,一般是在弹道预定距离上设置立靶,采用实弹进行射击,然后对一组弹丸的着靶坐标进行测量,通过坐标值计算得出立靶密集度[1]。目前传统测量立靶密集度的方法有靶板法[2]和自动化报靶装置[3-6]。靶板法主要包括木板靶和网靶,其不足主要表现为:1)在野外布设3 m ×3 m 或更大靶面的木板靶,工作效率低,且不能实时给出测量结果,也无法对重孔现象进行分析。2)网靶易受风等气象条件的影响,造成测量误差增大。3)以上方法均是采用手工测量弹丸的着靶坐标,工作效率低且严重存在不安全隐患。4)为了保证靶面上弹着点坐标能够反映真实坐标,要求立靶靶面与射击方向垂直。近几年涌现的自动化报靶装置,如英国MSI公司的B541 型声靶和B570 光学靶坐标测量系统[7],国 内 研 制ATS-1 型 阵 列 式 声 靶 坐 标 靶 系统[8],双CCD 交汇弹着点测量系统[9-10],六光幕阵列天幕立靶测量系统[11-12]等,虽然实现了自动测量和重孔的识别,但对2 发及以上数量的弹丸同时着靶的情况无法识别,导致测试失败。本文在六光幕阵列立靶密集度测试原理的基础上,增加一个光幕构建七光幕阵列,能够实现双管武器射击立靶密集度的测量。
1 六光幕阵列测量原理及公式
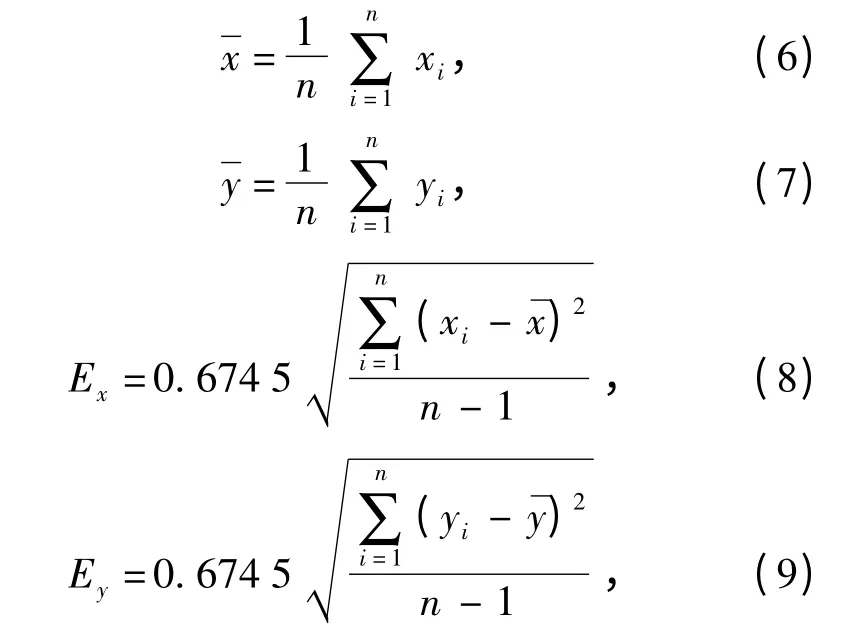
从已有文献[12]知,双Ⅴ形六光幕阵列可以测试单发射击下的弹丸立靶密集度等参数,图1 为光幕阵列的典型结构。G1、G2、G3、G4、G5、G6表示六个光幕,其中G1和G6平行,G2与G3的夹角、G4与G5的夹角均为2α,且均相对于光幕阵列的中间位置对称,光幕G1和G6的间距为靶距s.以光幕G1左下角的顶点为坐标原点O,建立如图1 所示坐标系。

图1 双Ⅴ形六光幕阵列Fig.1 The double Ⅴtype six-light-screen array
假设进行一组n 发弹丸的射击,则第i(i=1,2,…n)发弹丸飞行的方位角γi,俯仰角θi,实际飞行速度vi,着靶坐标xi,yi可以通过以下公式计算:

式中:ti1,ti2,ti3,ti4,ti5,ti6为第i 发弹丸依次穿过光幕G1~G6的时刻。
然后根据该组中所有弹丸的着靶坐标,通过以下公式计算出该组射击的立靶密集度参数:
但是当2 个飞行目标同时穿过六光幕阵列时,由于无法从采集到的时刻中识别出同一发弹丸穿过各个光幕的时间序列,将无法实现每一发弹丸着靶坐标的计算,更无法实现立靶密集度的测试,即六光幕阵列仅适用于单管武器立靶密集度参数的测试,无法实现双管武器立靶密集度的测试。
2 七光幕阵列测试飞行双目标的原理
在上述双Ⅴ形六光幕阵列结构的基础上,增加一个光幕G7构成七光幕阵列,如图2 和图3 所示,光幕G1、G6、G7相互平行,且光幕G6和G1、G4和G5、G2和G3均关于光幕G7对称。
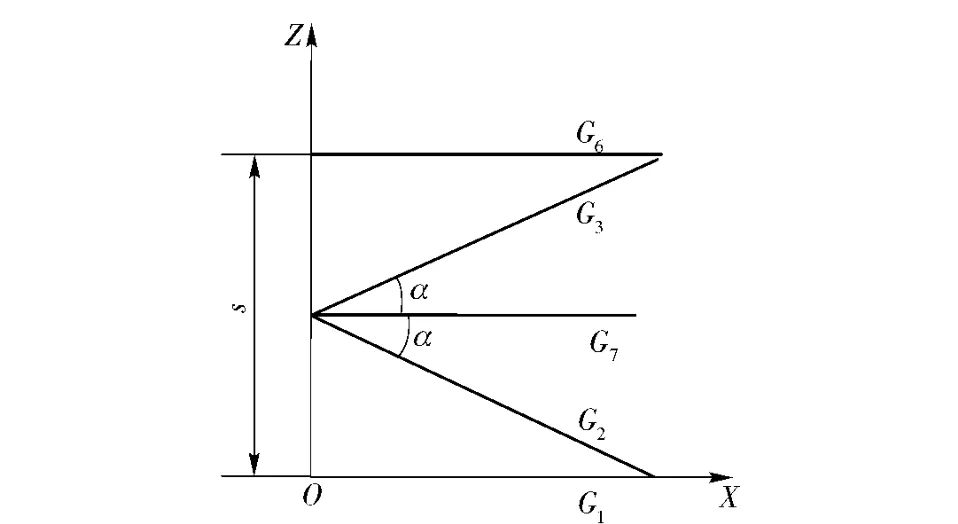
图2 七光幕阵列在XOZ 平面投影Fig.2 The projection of the seven-light-screen array in the XOZ plane
2.1 弹丸穿过光幕阵列时间序列信号的采集
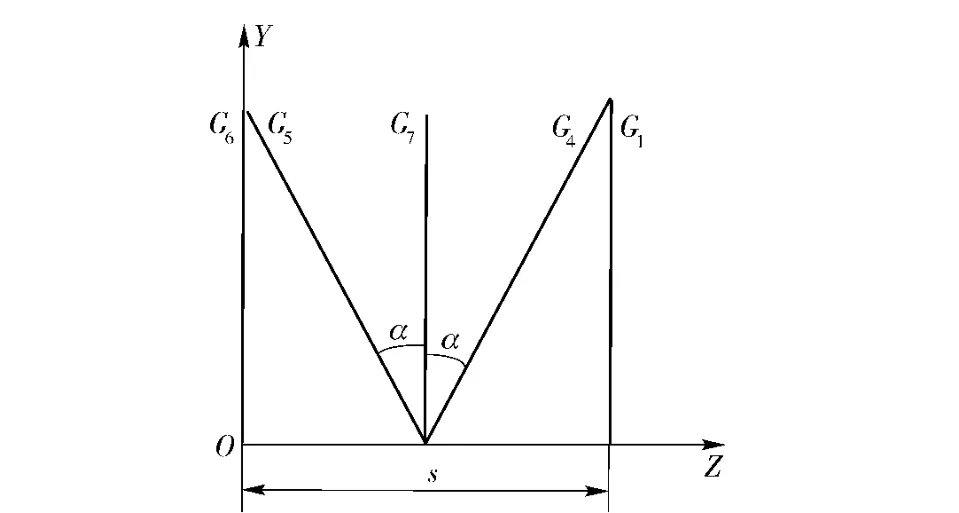
图3 七光幕阵列在YOZ 平面投影Fig.3 The projection of the seven-light-screen array in the YOZ plane
假设某双管高炮的炮管空间位置分布如图4 所示,弹丸飞行的轨迹为直线,该炮发射的两发弹丸穿过七光幕阵列时,各光幕输出弹丸过靶时刻的弹形信号,多通道采集仪记录各光幕的输出的弹形信号,通过专用算法[13]对弹形信号处理,获得弹丸穿过光幕阵列的时间序列。设弹丸穿过光幕的时刻为tij,i=1,2,表示炮管,j=1,2,…,6,7,表示第j 个光幕。因此,射击一次,七光幕阵列最多输出14 个弹形信号,如果两发弹丸同时穿过某一光幕,则数量应少于14.然后对采集到的信号进行区分,识别出同一发弹丸穿过光幕阵列的时间序列,完成每一发弹丸的相应参数的计算。

图4 双管的空间位置分布Fig.4 The spatial distribution of location of the double barrel canon
2.2 同一发弹穿过光幕阵列时间序列识别方法
该双管高炮发射后,同时射出两发弹丸,两发弹丸的飞行轨迹及光幕阵列在YOZ、XOZ 平面的投影分别如图5、图6 所示。

图5 YOZ 平面的投影Fig.5 The projection in the YOZ plane

图6 XOZ 平面的投影Fig.6 The projection in the XOZ plane
下面以弹丸穿过光幕阵列在YOZ 平面的投影为例,说明同一发弹丸穿过光幕阵列时间序列的识别方法。首先根据光幕G1、G6、G7间的对称、平行关系,识别出同一发弹丸穿过这3 个光幕的时间序列,其算法流程如图7(a)所示;然后取其中一组时间序列,根据靶距s 和弹丸飞过光幕G1到G6的时间间隔,计算出该发弹丸沿预定弹道方向的飞行速度v0;将光幕G4上采集到的2 个时刻分别与该发弹丸在光幕G1上的时刻做差,差值与速度v0的乘积等于从光幕G1到光幕G4的水平距离,因此,可以在光幕G4上确定2 个位置,同理在光幕G5上确定两个位置;分别在光幕G4、G5上各任取一点即可确定一条直线,因此,共可确定4 条直线,但只有一条直线是弹丸实际飞行轨迹在YOZ 平面上的投影线。最后可以通过判断直线是否通过炮管发射点在YOZ 平面的投影点,或者判断那条直线离发射点最近,来剔除4 条直线中的3 条虚假投影弹道线。与实际弹道线对应的光幕G4、G5上的时间序列即为该发弹丸的过幕时间序列。其算法流程图如图7(b)所示。
同理,根据图6 光幕阵列在XOZ 平面上的投影,在上述同一组时间序列的基础上,用相同的方法可分别在光幕G2、G3各确定两个位置,组成4 条直线,剔除3 条虚假弹道线,与实际弹道线对应的光幕G2、G3上的时间序列即为该发弹丸的过幕时间序列。其算法流程图与图7(b)类似。
综合YOZ、XOZ 平面的识别结果,可获得同一发弹丸穿过光幕阵列的时间序列,之后根据六光幕阵列测量(1)式~(5)式,计算出每一发弹丸的着靶坐标,一组射击完毕后,可根据(6)式~(9)式,计算出立靶密集度参数值。
3 误差分析
由七光幕阵列的测量原理知,七光幕阵列测试弹丸射击密集度参数的计算公式与六光幕阵列的测量公式相同,故七光幕阵列的测试精度与六光幕阵列的测试精度是一致的。
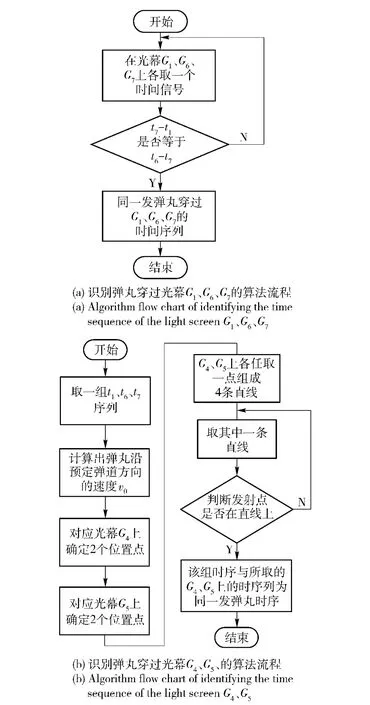
图7 算法流程图Fig.7 The algorithm flow chart
根据六光幕阵列测试单个弹丸着靶坐标的测量公式,对该测试方法的误差进行分析[14],结合研制的实际六光幕光幕阵列结构,设结构参数分别为:α=33.023 9°,s=2600 mm,设弹丸速度v=1000 m/s,根据实际装调和测试中可以达到的误差精度设dα=0.01°,ds=0.5 mm,时间测量误差为1 μs.当靶面为2 m×2 m 时,x、y 坐标的误差分布如图8、图9 所示。
假设弹丸的着靶位置已知x = 400 mm,y =600 mm,当弹丸飞行角度在[0,0.2°]内变化时,由飞行角度引起的x、y 坐标的误差分布如图10、图11所示。
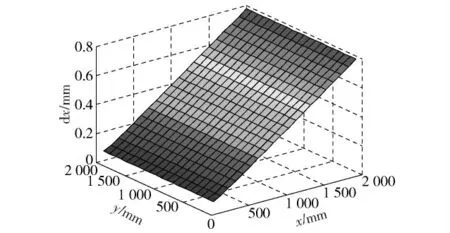
图8 x随坐标位置的误差分布Fig.8 The x errors with the different positions

图9 y随坐标位置的误差分布Fig.9 The y errors with the different positions
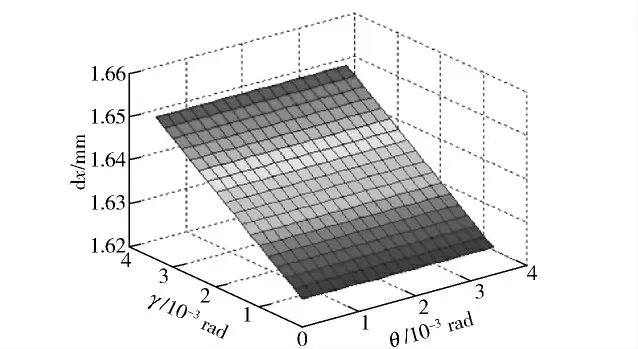
图10 x随入射角度的误差分布Fig.10 The x errors with the different flying angles

图11 y随入射角度的误差分布Fig.11 The y errors with the different flying angles
从以上误差分析结果可以看出:由着靶位置引起的x 坐标的测量误差小于0.8 mm,y 坐标的测量误差也小于0.8 mm;由弹丸飞行角度引起的x 坐标的测量误差小于1.65 mm,y 坐标的测量误差小于2.41 mm.根据误差理论,可得出坐标x、y 的测量误差分别为

射击的立靶密集度参数是根据弹丸着靶坐标进行计算的,因此弹丸着靶坐标的精确测量可保障射击立靶密集度参数的测试精度。
4 仿真验证
4.1 双目标弹丸着靶坐标测试的仿真验证
以炮管结构如图4 所示的双管炮为例,验证七光幕阵列测试双管武器单次射击时弹丸着靶坐标计算的可行性。设光幕阵列的靶距s =1 300 mm,α =33.023 9°,尺寸d 为1 000 mm,z0为5 000 mm,炮管发射的2 发弹丸的飞行信息如表1 所示。
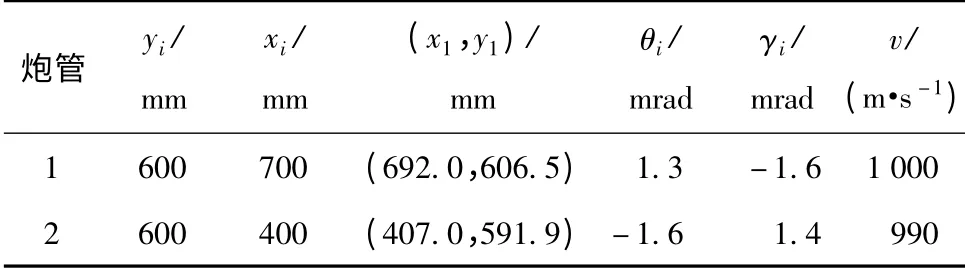
表1 2发弹丸的飞行信息Tab.1 The flying parameters of the two projectiles
表1中,yi表示第i 个弹丸发射位置在YOZ 平面的投影点的y 坐标;xi表示第i 个弹丸发射位置在XOZ 平面的投影点的x 坐标;(x1,y1)为弹丸穿过光幕G1的横纵坐标;θi、γi分别为第i 个弹丸飞行的俯仰角、方位角;v 是弹丸的实际飞行速度。
根据以上信息结合图5、图6,可写出光幕G1、G4、G7、G5、G6在YOZ 投影平面上的直线方程,光幕G2、G3在XOZ 平面上投影直线方程及每个弹丸的弹道线在相应平面上投影的直线方程。光幕G1、G4、G7、G5、G6、G2、G3投影的直线方程、弹道线在YOZ、XOZ 平面上投影的直线方程依次为


将表1 仿真条件带入(12)式~(20)式做相应计算,可以得到第i 个弹丸穿过第j 个光幕的时刻tij.首先根据YOZ 平面的投影线,反求出弹丸穿过相应光幕的时间,如表2 所示。
表2 反求的时间信息Tab.2 The calculated time sequence
通过计算光幕G7与G1上时刻的差值和G7与G6上时刻的差值,找到差值相等的2 组,如表3 所示。

表3 同一发弹丸穿过G1、G6、G7上的时间值序列Tab.3 The time sequence for the same projectile going through the light screens G1、G6、G7
取表3 中的一组时间序列,对应在光幕G4、G5上各确定2 个位置,并且可以组成4 条直线,如图12所示。通过计算可以获得每一组序列对应的光幕G4、G5上的位置点的坐标,如表4 所示。
图12 弹丸时间序列识别示意图Fig.12 The sketch map of identifying the time sequence
根据两点确定一条直线,从G4、G5上各任取一点可确定一条直线,设直线方程为y =kjz +bj(j =1,2,3,4)计算结果如表5 所示。
表5 中ti4、ti5是对应直线在光幕G4、G5上的时刻、yj为对应直线方程在z 取-5 000 时的对应值,y0为发射点的实际y 坐标。从表5 中的数据可以看出,第1 组时间序列中,直线A1C1对应的y 值和y0最接近,第2 组时间序列中,直线B2D2对应的y 和y0最接近。即A1C1是一发弹丸的实际弹道线在YOZ平面的投影,B2D2是另一发弹丸的实际弹道线在YOZ 平面的投影。同理,反求出光幕G2、G3上的时间信息,如表6 所示。

表4 YOZ 平面上每一组时间序列所确定的4 个位置点的坐标Tab.4 The coordinates determined by each time group in the YOZ plane
表5 YOZ 投影平面的仿真结果Fig.5 The simulation results based on projection of the light screen array in YOZ plane

表6 反求的时间信息Tab.6 The calculated time sequence
对应表3 中的每一组时间序列,以同样的方法在光幕G2、G3上各确定两个位置点的坐标,每一组时间序列对应的点的字母符号及位置分布与图8 分布相同,同样每一组时间序列对应4 条直线,计算结果如表7 所示。
从表7 中的数据可以看出,第1 组时间序列中,直线A1D1对应的x 值和x0最接近,第2 组时间序列中,直线B2C2对应的x 值和x0最接近。即A1D1是第1 组时间序列对应弹丸的实际弹道线在XOZ 平面的投影,B2C2是第2 组时间序列对应弹丸的实际弹道线在XOZ 平面的投影。
表7 XOZ 投影平面的仿真结果Fig.7 The simulation results based on the projection of light screen array in XOZ plane
综合表3、表5、表7 的信息,即可获得同一发弹丸穿过光幕阵列的时间序列。将时间序列带入到六光幕阵列的弹幕参数的(1)式~(5)式,计算出弹丸的5 个飞行参数,如表8 所示。
表8 与表1 中的仿真信息完全一致,说明文中所提的时间序列的识别方法正确可行,可实现双管武器同时射击出两发弹丸时每一发弹丸着靶坐标的计算。
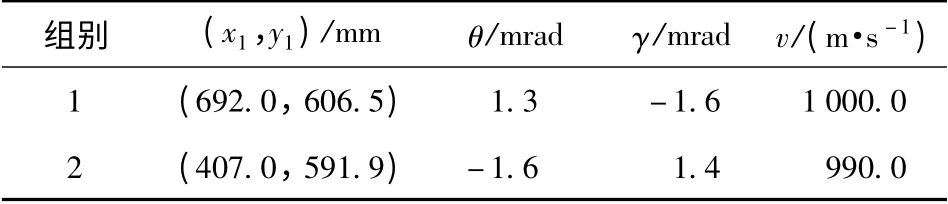
表8 弹丸飞行参数的计算结果Tab.8 The calculated flying parameters of projectiles
4.2 双管武器立靶密集度测试的仿真验证
假设图4 的双管武器进行了5 次射击,射击时两管的空间位置保持不变,炮管的空间位置相对于测量坐标系的坐标为(x0,y0),(x01,y01)是对应该发弹丸穿过光幕G1时的坐标值,给定每发弹丸飞行的方位角γ 和俯仰角θ 后,便可以反求出各个光幕采集到的时间值,根据文中所提的时间序列识别算法,识别出双管武器每次射击后的每一发弹丸的过靶时间序列,进而计算出其着靶坐标,最后根据所有弹丸的着靶坐标计算出该组射击的立靶密集度参数,仿真结果与仿真条件比对的结果如表9 所示。
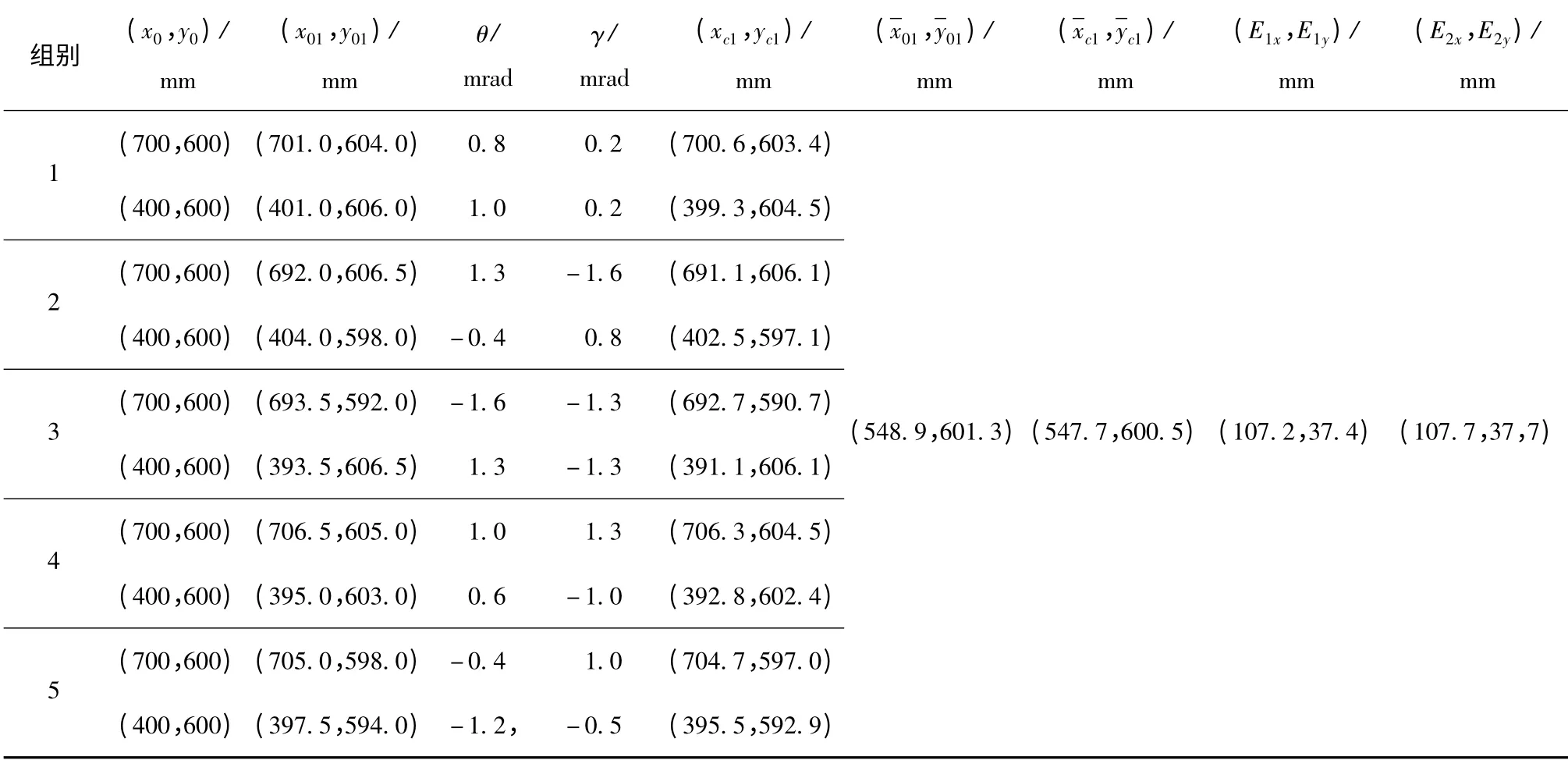
表9 立靶密集度参数测试的仿真结果Tab.9 The simulation results of measuring the impact location dispersion parameters
表9 中,(xc1,yc1)是将七光幕阵列识别出的同一发弹丸的时间序列代入到(1)式~(5)式计算出的弹丸着靶坐标、(E2x,E2y)分别是根据坐标值(xc1,yc1)计算获得的该组弹丸射击的平均方位散布中心坐标值和平均高低散布中心坐标值、方位中间误差值和高低中间误差值。和(E1x,E1y)均是根据仿真给定的坐标值(x01,y01)计算的该组弹丸射击的平均方位散布中心坐标值和平均高低散布中心坐标值、方位中间误差值和高低中间误差值。通过比较对应数据,可以看出仿真结果与仿真条件一致,说明该测试方法可实现双管立靶密集度参数的测试。
5 结论
在双Ⅴ形六光幕阵列的中间增加一个光幕构建七光幕阵列,利用直线弹道原理和时间对称原理提出了同一发弹丸穿过光幕阵列的时间序列识别算法,能够在两发弹丸穿过光幕阵列的一组时间序列中找出同一发弹丸的时间序列,然后采用六光幕阵列测量公式计算弹丸着靶坐标等参数,进而实现了双管武器立靶密集度的测试。MATLAB 仿真验证结果表明,所提方法有效可行,对双管武器立靶密集的测试具有理论指导意义。本方法还有待进一步研究双目标信号识别的改进算法,如光幕阵列非严格对称条件下的识别算法,并用实弹射击进行验证。
References)
[1]GJB3196.18—1998,枪弹实验方法.第18 部分:射击密集度[S].北京:国防科学技术工业委员会,2006.GJB3196.18—1998,Test methods of cartridge.Part 18:firing accuracy and dispersion test[S].Beijing:Commission of Sci-ence,Technology and Industry for National Defense,2006.(in Chinese)
[2]王昌明.实用弹道学[M].北京:兵器工业出版社,1994.WANG Chang-ming.The applied ballistics[M].Beijing:The Publishing House of Ordnance Industry,1994.(in Chinese)
[3]Lu S T,Chou C,Lee M C,et al.Electro-optics target for position and speed measurement[J]IEE Proceedings-A,1993,140(4):252 -256.
[4]Crittenden E C,King R A,Andrews T C.Target measurement system for precise projectile location:US,3727069[P].1973 -04 -10.
[5]Gauthier L R,Drewry D G,Brunner L.Optical sensor and method for detecting projectile impact location and velocity vector:US,6931166 B2[P].2005 08 16.
[6]Davis L R,Brown T E.Photocell array sensor for projectile position detection:US,6617563B1[P].2003 - 09 -09.
[7]MS Instruments PLC.Optical target type 570[EB/OL].2012[2013 03 01].http:∥www.msinstruments.co.uk/wp-content/uploads/2010/09/570-opticaltarget.pdf.
[8]McCarthy B D,Regan B J.Position measurement apparatus and method:US,4885725[P].1989 -12 -05.
[9]颜树华,叶湘滨,王跃科.CCD 光靶交汇测量精度的理论研究[J].光电子·激光,1999,10(4):113 -117.YAN Shu-hua,YE Xiang-bin,WANG Yue-ke.Research on intersection measurement precision of CCD optical target in theory[J].Journal of Optoelectronics Laser,1999,10(4):113 -117.(in Chinese)
[10]杨华勇,吕海宝.双CCD 交汇测量系统结构参数的优化设计[J].光学技术,2001,27(4):348 -351.YANG Hua-yong,LV Hai-bao.Optimization on structure parameters of intersection measuring system with dual-CCD[J].Optical Technology,2001,27(4):348 -351.(in Chinese)
[11]倪晋平,宋玉贵,冯斌.双天幕靶交汇测量弹丸飞行参数原理[J].光学技术,2008,34(3):388 -394.NI Jin-ping,SONG Yu-gui,FENG Bin.The principle for measuring motion parameters of projectiles using two sky screens in vertical intersection manner[J].Optical Technique,2008,34(3):388 -394.(in Chinese)
[12]倪晋平,杨雷,田会.基于大靶面光幕靶的两类六光幕阵列测量原理[J].光电工程,2008,35(2):6 -11.NI Jin-ping,YANG Lei,TIAN Hui.Measurement principle for two kinds of six-light-screen array composed by large area light screen[J].Opto-Electronic Engineering,2008,35(2):6 -11.(in Chinese)
[13]倪晋平,田会.用于光幕测试的时刻信息提取方法研究[J].光学技术,2008,34(1):141 -148.NI Jin-ping,TIAN Hui.A study on method for acquiring moment on which a projectile going through a light screens[J].Optical Technique,2008,34(1):141 -148.(in Chinese)
[14]卢红伟.阵列炮管实时测速技术研究[D].西安:西安工业大学,2012.LU Hong-wei.Study on the velocity measurement of flying projectiles fired by the array gun-barrel weapon in real time[D].Xi’an:Xi’an Technological University,2012.(in Chinese)