基于单截面低频检测数据的信号交叉口排队长度估计*
2018-04-08李爱杰唐克双董可然
李爱杰 唐克双 董可然
(同济大学交通运输工程学院 上海 201804)
0 引 言
交叉口是城市道路的瓶颈,同时也是交通拥堵的诱发点和常发地点。而排队长度作为信号交叉口交通状态和服务水平的重要指标之一,也是信号控制的重要参数,因此,城市信号交叉口排队长度估计对于优化交叉口信号控制和改善人们出行质量具有重要的理论意义和实际价值。
在我国大城市,信号交叉口排队长度估计主要基于浮动车数据。而大多数中小城市受制于浮动车比例不足(一般不足5%),采样频率低(大部分为60 s)等因素,交通数据的采集主要依赖于布设在信号交叉口上游路段的线圈、微波、地磁等定点检测设备,这种检测器一般布设在距离信号交叉口停车线2/3路段长度的位置,见图 1。
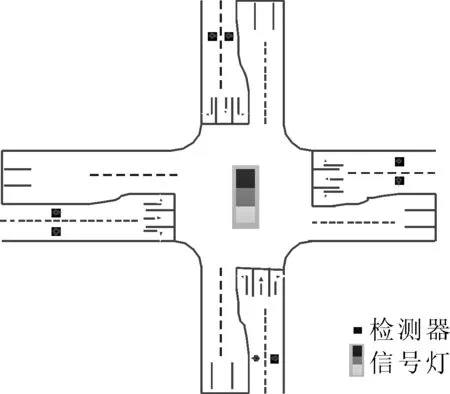
图1 路段检测器布设位置Fig.1 Position of point detector
为了减小数据库存储量,这种检测器一般仅在一定时间间隔(通常为60 s)输出集计的流量、占有率和速度等数据。这使得国外普遍利用高频检测数据计算信号交叉口排队长度的方法[1]难以适用。
基于这种单截面低频检测数据的信号交叉口排队长度估计主要存在以下问题。
1) 60 s等间隔的数据难以反映实时的交通特征。如图2所示,检测器输出的各60 s间隔的流量为离散的,而实际到达流量则是连续的。
2) 检测器与停车线距离较远,造成红灯相位期间,检测器位置依然有车辆通过,检测器参数难以与信号配时数据匹配。
3) 当交通拥堵发生时,经常会出现车辆排队长度超出检测器的情况,此时检测器的检测参数无法正确反映真实的交通状况。
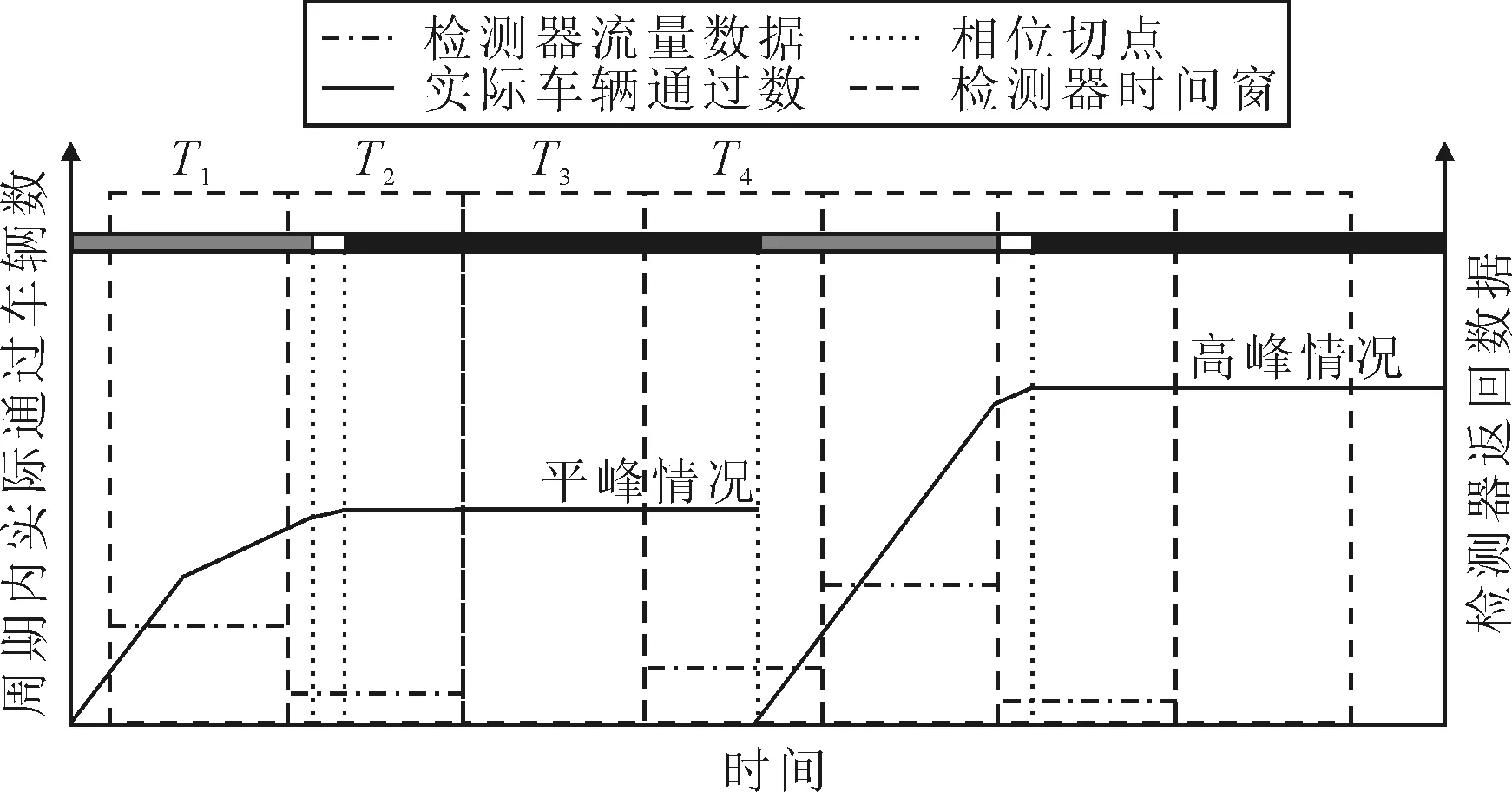
图2 定点检测器数据与信号配时数据的匹配问题Fig.2 The problem between detector data and signal data
因此,如何仅凭低频的定点检测器数据实现信号交叉口交通状态估计成为我国大多数中小城市工程实践中亟待解决的技术难题之一。笔者针对这种数据源条件及其存在的问题,通过融合定点检测器数据和信号配时数据,并结合轨迹数据标定部分参数,依据交通波动理论和交通仿真思想,提出了一种信号交叉口排队长度估计方法,并验证了其有效性。
1 文献综述
根据数据源条件的不同,信号交叉口排队长度估计可以分为:基于定点检测数据的信号交叉口排队长度估计;基于移动检测数据的信号交叉口排队长度估计;以及基于多源数据融合的信号交叉口排队长度估计。
在基于定点检测数据的信号交叉口排队长度估计方面,Muck[2]通过分析排队长度超过固定检测器所在位置和排队长度的关系得出了计算信号交叉口排队长度的线性关系模型。Skabardonis等[3-4]基于交通波理论,以30 s间隔统计线圈数据,通过分析流量和排队车辆队尾的位置求取最大排队长度。姚荣涵等[5-6]将当量排队长度变化率表示为上下游车流密度与交通波的函数,求取当量最大排队长度变化率与交通波的关系,并分别利用5 s和15 s间隔的检测器数据验证分析。Liu等[7-9]采用秒级的线圈检测器数据和信号配时数据,基于冲击波理论,提出了基于时间的排队长度估计方法。该方法通过分析周期内检测器占有时间变化来判断长排队(即排队长度超出检测器位置),结合信号配时数据求取集结波和消散波的波速,然后求得周期最大排队长度。随后,又提出了SPM模型 (shockwave profile model),将拥堵路段简化为自由流状态、饱和状态和拥堵状态3种情形,模型模拟了集结波、消散波、驶离波和压缩波等4种主要干道交通波的动态特性,继而确定路段排队长度,该模型特别适合有交通溢流现象发生的信号控制的城市主干道。Cho Hsun-jung等[10]利用双截面定点检测数据估计交通波波速与上游车辆到达率,进而基于交通波理论求取信号交叉口排队长度。贾利民等[11]基于单个地磁数据,通过分析车辆通过传感器时间与车尾时距描述车辆排队演化过程,进而求取排队长度。赵淑芝等[12]基于4 s频率的路中检测器(距离信号交叉口停车线450 m)数据,通过改进METANET方法进行信号交叉口排队长度估计。
在基于移动检测数据的信号交叉口排队长度估计方面,Comert等[13]基于探测车数据,利用贝叶斯算法通过判断最后一辆排队探测车所处位置求取最大排队长度。Cheng等[14]利用车载终端设备,采集车辆行驶轨迹。将车辆行驶状态分为2类:①车辆运动速度一致;②车辆运动加速度一致。从轨迹中筛选出运动状态变化的关键点,然后结合交通波理论求取最大排队长度。Ban等[15]提出了一种基于移动检测器釆集行驶时间的路口实时排队长度逆向模拟过程,分为2步:①根据采集时间计算延误;②利用延误来判断排队长度最大和最小关键点。Hao[16]在此基础上,通过考虑车辆到达集结波不稳定特性,结合车辆运动方程,仅分析车辆消散过程得到排队估计模型。Ramezani和Geroliminis[17]基于车辆行驶轨迹数据通过分析车辆排队形成和排队消散过程,绘制实时排队轮廓图,从而实现排队长度估计。Li等[18]在前者基础上,提出了一种新的交通波拟合和排队长度计算方法,并分析了在不同采样频率和抽样率条件下的误差。考虑交通系统中部分不确定性因素的前提下,利用概率论方法建立得到的排队长度或延误估计模型。
近年来,随着交通信息采集技术的快速发展,使得基于多源数据融合的信号交叉口排队长度估计成为可能。吴翱翔[19]通过融合RFID数据与视频数据提取行程时间,并与浮动车数据判别出来的交通状态进行决策级融合,求取最大排队长度。蔡青等[20]基于浮动车数据和定点检测器数据,通过分析浮动车启停关键点,以及长排队出现前后的关键点,借助交通波理论,求取最大排队长度。
综上所述,基于单截面低频(60 s间隔)定点检测数据的排队长度估计研究是较少的,少量涉及30 s间隔频率的方法也存在着与信号配时数据匹配困难,估计精度不高等问题;而基于高频定点检测数据、移动检测数据和数据融合的方法,虽然获得了较高的估计精度,但往往对数据的精度要求也很高,这与目前我国大多数中小城市的数据特征不符,所以很难在工程实践中得到应用。
2 排队长度估计建模
笔者提出的基于单截面低频(60 s间隔)检测数据的信号交叉口排队长度估计方法主要包括以下步骤:①利用时间占有率与流量、速度之间的函数关系判断排队长度是否超出检测器;②根据信号配时数据将低频(60 s间隔)检测器数据进行时间切分,并与信号配时数据匹配;③基于交通波理论求取周期最大排队长度。具体技术算法流程见图3。

图3 算法技术路线Fig.3 Technology roadmap
模型基于以下假设。
1) 到达交通流。每60 s间隔内车辆到达满足均匀分布。
2) 车辆加减速。忽略车辆在信号交叉口停车排队和消散过程中的加减速,即认为车辆瞬间完成加减速过程。
2.1 长排队识别
定点检测器采集的集计的车道断面数据主要包括时间占有率、平均车速、流量等,根据初始排队长度、最大排队长度以及上游交通需求关系将某一周期的交通状态分为3种情况。
1) 最大排队长度未超过固定检测断面,且上游到达交通量较小,消散波与集结波很快相遇,排队队尾及其之后的车辆均可在绿灯时间内顺利通过停车线,而不受排队影响(见图4 a)),检测器可记录周期内所有到达车辆。
2) 最大排队长度超过检测断面,上游到达交通量较大,虽然在绿灯期间消散波可以与集结波相遇,但排队队尾车辆无法在绿灯期间内通过停车线,极有可能出现二次停车现象(见图4 b)),检测断面只能记录排队长度尚未超出检测断面以及排队消散到检测断面之后的车辆。
3) 初始排队长度较大,上游到达交通量非常大,消散波在绿灯时间内无法与集结波相遇,则会出现严重的二次停车甚至多次停车现象(见图4 c),此时,只有当排队车辆消散到检测断面后,检测断面才能记录到达车辆。

图4 交通状态、排队长度与检测器的位置关系Fig.4 Relationship between traffic state, queue length, and the position of detector
占有率可表示为:在一定时间间隔T内,检测器被占用的时间t和T的比值,即
(1)
式中:T为检测器数据的输出频率,s;i为第i辆车;D为检测器自身长度,m;ui为第i辆车的速度,m/s;Li为第i辆车的车身长度,m;Oc为检测器时间占有率。
(2)

在排队长度尚未超出检测器的情况下,检测器输出的时间占有率、流量、速度能够真实反映路段交通状态。此时,统计得到的检测器数据(速度、流量、占有率)服从式(2)的函数关系;当排队长度超出检测器后,由于检测器被车辆长时间占有,检测器输出的速度和流量数据为0,占有率数据为1,不再满足式(2)的函数关系,故可以此作为长排队判断的依据。
2.2 检测器数据与信号配时数据匹配
基于假设1,车辆在每60 s间隔内均匀到达,将60 s集计的检测器数据处理成秒级数据,如:第600~660 s检测器输出的流量数据为7 veh,处理后车辆的到达率为0.117 veh/s,第一辆车在第609 s通过检测器。

(3)

图5 时间修正Fig.5 Detected time rectification
研究相位红灯启亮时刻为Ri,绿灯启亮时刻为Gi,初始排队长度为0,则红灯启亮之后从Ri-Δt时刻开始检测器检测到的车辆开始在停车线前排队,一直到Gi时刻绿灯启亮后车辆开始消散。
2.3 排队长度估计
基于交通波理论构建的信号交叉口排队长度估计模型主要算法步骤如下。
步骤1。利用与信号配时数据匹配好的检测器数据,计算集结波波速w1和红灯期间的排队长度Lr(见图4)。
(4)

步骤2。求解消散波与集结波相遇时刻。
(6)
式中:Lse(i-1)为上一周期剩余排队长度,m;w2为消散波波速,标定得到,m/s;Gi为绿灯启亮时刻,s;tb(i)为第i个周期消散波与集结波相遇时刻,s。
步骤3。判断消散波与集结波相遇时刻tb是否超过了下1周期的红灯启亮时刻,如果tb超过了下1周期红灯启亮时刻(见图4 c)),则转至步骤4,否则转至步骤5。
步骤4。求取周期内最大排队长度和剩余排队长度,并判断是否为最后1个周期,如果是则迭代结束,否则转至步骤1。
(7)
Lse(i)=Lmax(i)-w2·tg
(8)
式中:Lmax(i)为i个周期最大排队长度,m;C为周期时长,s;w2为消散波波速,m/s;tg为绿灯时长,s。
步骤5。求取周期内最大排队长度,并计算驶离波通过停止线的时刻。
Lmax(i)=w2·(tb(i)-Gi)
(9)
(10)
式中:tm(i)为第i周期最后一辆排队车辆通过停止线的时刻,m/s;w3为驶离波波速,标定得到,m/s。
步骤6。判断时刻tm(i)是否超出了下1周期红灯启亮时刻,如果没有超出则本周期剩余排队长度为0(见图4 a)),再判断是否为最后1个周期,如果是则迭代结束,否则转至步骤1,如果tm(i)超出了下1周期红灯启亮时刻(见图4 b))则转至步骤7。
步骤7。求取驶离波与压缩波相遇的时刻,并计算剩余排队,判断是否为最后一个周期,如果是则迭代结束。否则转至步骤1。
(11)
Lse(i)=w4·(ta(i)-Ri+1)
(12)
式中:ta(i)为第i周期驶离波与压缩波相遇时刻,s;w4为压缩波波速,标定得到,m/s。
3 仿真评价
3.1 仿真场景
为了验证模型的有效性,以青岛市山东路-江西路南进口作为研究对象建立VISSIM仿真模型,见图6。信号配时参数设计采用真实的信号配时方案,见图7。同时,为了验证模型对不同饱和度的适应性,在仿真场景设计中分别设置了低(0.65)、中(0.75)、高(0.95)3种饱和度场景。

图6 仿真模型Fig.6 Simulation model
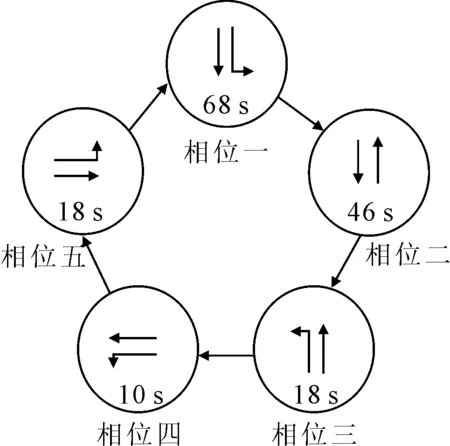
图7 信号配时方案Fig.7 Signal timing scheme
仿真时长为8 000 s,检测器数据输出频率为60 s,选取600~7 800 s时间间隔的数据为试验数据。
3.2 参数标定
3.2.1长排队模型参数标定
将检测器输出的120组数据根据是否出现长排队分为2类:第一类为未出现长排队的样本点(98个,见图8);第二类为出现长排队的样本点(22个)。利用一类样本点对式(2)的参数进行标定。
(13)

图8 长排队区间识别Fig.8 Distinguish of long queue length
3.2.2波速标定
对于w2,w3,uf等参数的标定,利用由VISSIM输出的.fzp轨迹数据通过画出车辆轨迹图进行波速标定,见图9。
消散波波速w2的标定。将停车车辆启动时刻的点标记出来并连接得出斜率w2=4.69 m/s。对于驶离波w3的标定,则根据排队队尾第一辆非排队车车速标定得到w3=10.5 m/s,uf=13.89 m/s。S0是饱和流率,以1 800 veh/h折算成秒级为0.5 veh/s。w1是以处理后的检测器流量数据作为输入,按式(4)计算得到。
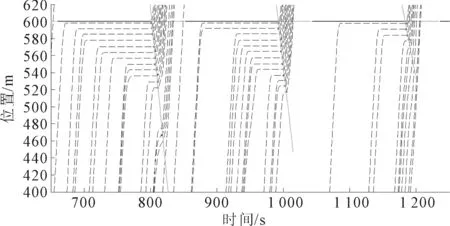
图9 波速标定Fig.9 Calibration of wave speed
3.3 仿真结果
3.3.1长排队识别仿真结果
为了提高模型的容错性,以式(13)置信度为95%的置信区间作为长排队的识别条件。图10为长排队区间识别。由图10可见,在120个样本点中,有2个一类样本点和5个二类样本点出现了误判,模型对长排队的识别精度达到了94.2%。
由图10可得尚未出现排队溢出的点其时间占有率均较低,而出现排队长度溢出的点时间占有率明显较高,其阈值大概介于0.08~0.10之间,所以Nikolas Geroliminis提出的占有率阈值法判断排队长度也具有一定的有效性,但与笔者所提出的排队溢出置信区间法相比精度会有所降低。

图10 长排队区间识别Fig.10 Distinguish of long queue length
3.3.2排队长度估计仿真结果
利用3.1仿真中所设置的不同饱和度场景,对排队长度估计模型进行验证分析。对于最大排队长度的估计结果误差分析采用平均绝对误差(MAE)和平均绝对误差(MAPE)百分比2个指标。
(14)
(15)

图11为排队长度估计值。由图11可见,在低、中、高3种饱和度场景下,模型的估计精度均达到了80%以上,其中低饱和度和中饱和度场景下排队长度平均绝对误差小于20 m/cycle(约3 veh/cycle),高饱和度场景下,排队长度平均绝对误差小于45 m/cycle(约6 veh/cycle)。这说明模型对不同饱和度下的排队长度估计具有很好的适用性。但当长排队持续时间过长时,模型的预测精度就会下降(见图11 c))。这主要是由于排队长度超出检测器后,由检测器输出到达流量数据无法反映检测器上游真实的交通需求。当长排队持续时间较短时,基于时间序列的思想,认为长排队出现前60 s间隔的车辆到达情况最接近真实情况,所以笔者选用长排队出现前的60 s间隔的到达流量进行修正。但当长排队持续时间过长,出现过饱和现象时,该方法的有效性就会明显降低(见图11 c)),说明当出现过饱和时,仍然基于排队长度超出检测器前临近1 min的检测器数据进行修补将会失效。

图11 排队长度估计Fig.11 Estimation of queue length
4 实证分析
4.1 实证场景
利用青岛市山东路-江西路交叉口南进口作为实例分析对象。该交叉口南进口路段长度约450 m,交叉口上游250 m位置布设有微波雷达检测器(见图12),检测数据的上传频率为60 s。信号配时方案与仿真采用的信号配时方案(见图7)一致。

图12 山东路-江西路交叉口信号交叉口Fig.12 Intersection of Shangdong road and Jiangxi road
4.2 参数标定
4.2.1长排队模型参数标定
与仿真中采用的长排队拟合方法一样,利用2016年12月1日早高峰07:00—09:00 期间的2 h共120组微波雷达检测器数据进行实例验证分析。
4.2.2波速标定
对于w2,w3,uf等参数的标定,利用拍摄对应时段的视频数据,通过提取车辆轨迹标定。
基于视频提取车辆轨迹前,首先需要对交叉口停车线附近关键建筑物或设施做距离标定(见表1),并以此作为视频中坐标基准点,以0.6 s为步长提取车辆轨迹。

表1 距离标定Tab.1 Distance calibration
与仿真验证中的方法类似,基于车辆轨迹标定后的消散波波速w2=5.0 m/s,驶离波波速w3=12.5 m/s,自由流速度uf=15.0 m/s,饱和流率S0=0.5 veh/s。
4.3 验证结果
由于受到上游交叉口信号配时的影响,在拍摄早高峰并未出现排队长度超过检测器位置的情况。模型估计结果与视频提取的真实排队长度对比结果如图13所示。
从图13可以得出模型平均相对误差(MAPE)为18.8%,平均绝对误差(MAE)为20.5 m,大约为3 veh/cycle。模型精度达到了80%以上,具有很好的适用性。
模型的误差主要来源有以下几点:①距离交叉口南进口停止线200 m处是中国人民解放军第四○一医院车辆出入的影响;②由于检测器位置距离交叉口停车线距离较远,车辆有频繁的换道行为。这些都会影响到模型的验证精度。因此,在实证验证应进一步考虑流量波动的噪音影响。并且,由于下游增加了左转拓宽车道,所以如果增加上下游车道流量映射关系,都将进一步提高模型的估计精度。

图13 实证结果Fig.13 Results of empirical test
5 结束语
笔者研究主要包括2部分内容:①基于时间占有率与流量、速度关系的长排队识别模型。与传统的长排队识别方法相比该方法通过确定非长排队置信区间,对长排队情况进行判别,提高了容错性,验证结果表明该方法的验证精度达到了90%以上;②基于交通波理论的排队长度估计模型。与传统的排队长度估计方法相比,该方法所需的数据源比较简单,对不同饱和度情况下排队长度估计精度都达到了80%以上。
但研究仍存在部分不足,如未考虑路侧出入口的影响,以及上下游车道流量映射关系等。进一步的工作将解决上述问题,并融入电警数据,提高排队长度的估计精度。并在此基础上开展基于路段定点检测与电警数据融合的信号交叉口排队长度预测模型的研究。
参考文献References
[1]李克平.信号交叉口信号控制指南[M].北京:中国建筑工业出版社,2006.
LI Keping. The guide of signal control intersection[M].Beijing: China Architecture & Building Press,2006.(in Chinese)
[2]MUCK J. Using detectors near the stop-line to estimate traffic flows[J]. Traffic Engineering and Control,2002,43:429-434.
[3]SKABARDONIS A, GEROLIMINIS N. Real-time estimation of travel times along signalized arterials[J]. Transportation & Traffic Theory,2005.
[4]SKABARDONIS A, GEROLIMINIS N. Real-time monitoring and control on signalized arterials[J]. Journal of Intelligent Transportation Systems,2008,12(2):64-74.
[5]姚荣涵,王殿海.拥挤交通流当量排队长度变化率模型[J].交通运输工程学报,2009,9(2):93-99.
YAO Ronghan, WANG Dianhai. Change rate models of equivalent queue length for congested traffic flow [J].Journal of Traffic and Transportation Engineering,2009,9(2):93-99.(in Chinese)
[6]姚荣涵,王殿海.最大当量排队长度模型及其时空特性[J].大连理工大学学报,2010,50(5):699-705.
YAO Ronghan, WANG Dianhai. Mximum equivalent queue length model and time-space characteristics [J]. Journal of Dalian University of Technology,2010,50(5):699-705.(in Chinese)
[7]LIU H X, WU X, MA W, et al. Real-time queue length estimation for congested signalized intersections[J]. Transportation Research Part C: Emerging Technologies,2009,17(4):412-427.
[8]WU X, LIU H X, GETTMAN D. Identification of oversaturated intersections using high-resolution traffic signal data[J]. Transportation Research Part C: Emerging Technologies,2010,18(4):626-638.
[9]WU X, LIU H X. A shockwave profile model for traffic flow on congested urban arterials[J]. Transportation Research Part B: Methodological,2011,45(10):1768-1786.
[10]CHO H J, TSENG M T, HWANG M C. Using detection of vehicular presence to estimate shockwave speed and upstream traffics for a signalized intersection[J]. Applied Mathematics & Computation,2014,232(6):1151-1165.
[11]贾利民,陈 娜,李海舰,等.基于单个地磁传感器的交叉口排队长度估计[J].吉林大学学报(工学版),2016,46(3):756-763.
JIA Limin, CHEN Na, Li Haijian, et al. Intersection queue length estimation with single magnetic sensor[J]. Journal of Jilin University (Engineering and Technology Edition),2016,46(3):756-763.(in Chinese)
[12]赵淑芝,梁士栋,马明辉,等.信号交叉口实时排队长度估计[J].吉林大学学报(工学版),2016,46(1):85-91.
ZHAO Shuzhi, LIANG Shidong, et al. Real-time queue length estimation at signalized intersection[J]. Journal of Jilin University (Engineering and Technology Edition),2016,46(1):85-91.(in Chinese)
[13]COMERT G, CETIN M. Queue length estimation from probe vehicle location and the impacts of sample size[J]. European Journal of Operational Research,2009,197(1):196-202.
[14]CHANG T H, LIN J T. Optimal signal timing for an oversaturated intersection[J]. Transportation Research Part B: Methodological,2000,34(6):471-491.
[15]BAN X, HAO P, SUN Z. Real time queue length estimation for signalized intersections using travel times from mobile sensors[J]. Transportation Research Part C: Emerging Technologies,2011,19(6):1133-1156.
[16]HAO P, BAN X, YU J W. Kinematic equation-based vehicle queue location estimation method for signalized intersections using mobile sensor data[J]. Journal of Intelligent Transportation Systems,2014,19(3):256-272.
[17]RAMEZANI M, GEROLIMINIS N. Queue profile estimation in congested urban networks with probe data[J]. Computer-Aided Civil and Infrastructure Engineering,2015,30(6):414-432.
[18]LI F, TANG K, YAO J, et al. Real-time queue length estimation for signalized intersections using vehicle trajectory data[J]. Transportation Research Record: Journal of the Transportation Research Board,2017(2623):49-59.
[19]吴翱翔.基于多源数据的信号控制信号交叉口排队状态感知方法研究[D].上海:同济大学,2014.
WU Aoxiang. Research on the queue statues sense of signalized intersections based on multi-source data[D]. Shanghai: Tongji University, 2014.(in Chinese)
[20]CAI Q, WANG Z, ZHENG L, et al. Shock wave approach for estimating queue length at signalized intersections by fusing data from point and mobile sensors[J].Transportation Research Record,2014(2422):79-87.
