基于粒子群算法的多匝道协调控制
2018-03-27,,
, ,
(1.五邑大学 信息工程学院, 广东 江门 529020;2.电子科技大学中山学院 机电工程学院, 广东 中山 528400)
0 引言
社会经济的快速增长导致汽车数量剧增,高速公路拥堵时有发生,拥堵降低了高速公路主线的通行能力,增加了车辆延误时间,增大了燃油消耗,加大了环境污染,造成了巨大的经济损失。为了解决高速公路拥堵,一方面必须投入更多的建设资金、修建更多的道路;另一方面必须研究新技术,用先进的方法对高速公路进行控制和管理,从而充分利用现有的道路资源、减少交通拥堵。高速公路入口匝道控制是解决主线交通拥堵的有效办法,其主要目标是调节进入高速公路的车辆数目使得主线的交通需求不超过交通容量[1]。匝道控制方法根据控制对象不同可分为单匝道控制[2-3]和多匝道协调控制[4-5],其中多匝道协调控制综合考虑了高速公路不同路段之间的交互影响,成为匝道控制方法的主流发展方向。
目前已有多种多匝道协调控制方法,相关研究也取得了较好的结果,但现场应用还需加强[6]。文献[7]采用定量分层模型研究快速路多匝道协调控制,并根据交通状态和临界密度的差值比确定匝道控制次序,该方法具有一定的优越性,但可能出现某个入口匝道车辆排队长度较长。文献[8]利用动态模糊神经网络研究快速路匝道控制,该方法能使主线密度不超过临界密度,但文中只对单匝道控制进行了仿真,未对多匝道控制进行相应的分析。文献[9]采用模糊控制研究快速路匝道控制,该方法对主线流量控制具有较好的效果,然而模糊逻辑的隶属度函数和规则库的选取依赖于操作者的经验知识。文献[10]采用最优控制方法来减少高速公路拥挤,最优控制在实际应用中效果较好。文献[11]研究了基于迭代学习的高速公路多匝道调节,但是迭代学习依赖于重复性交通条件,当某天的交通异常不满足重复性时,控制效果会变差。近年来随着智能优化算法的广泛应用,匝道控制算法已经向智能优化算法发展,智能优化算法用于交通控制的参数优化或优化控制取得了较好的效果。文献[12]利用遗传算法对匝道控制多个性能指标进行综合优化,效果良好。除了多匝道协调控制外,还有多交叉口协调控制[13]。
从以上分析可以看出,目前多匝道协调控制的研究大多局限于理论层面,实用的技术较少。针对上述问题,本文采用广泛应用的比例积分微分(Proportional-Integral-Derivative, PID)控制器,并将智能优化算法与大系统分层控制策略相结合。大系统分层控制将整个控制任务分解成多层来实现,具有意义明确、易于实现的特点。多匝道控制系统分为协调控制层和直接控制层,直接控制层采用PID控制,粒子群算法用来对直接控制层的PID参数进行优化,最后通过仿真实例进行了控制效果和控制性能的验证。
1 高速公路多匝道系统的原理模型
1.1 多匝道系统的结构模型以及入口匝道流量控制的难点
图1是高速公路多匝道系统的结构模型,该高速公路有M个路段,每个路段至多含有一个入口匝道和一个出口匝道(某个路段允许不含有入口匝道或出口匝道),rj表示从路段j入口匝道进入到主线的交通流量,εj表示从路段j出口匝道离开的交通流量,j-1/2表示路段j-1和路段j的分界处,j+1/2表示路段j和路段j+1的分界处。当改变路段j入口匝道流量rj时,就会改变路段j的主线流量。由于主线交通流会向上游或下游传播,即:当交通顺畅时,交通流向下游传播,下游交通会受到上游交通的影响;反之,当交通拥挤时,交通流向上游传播,上游交通会受到下游交通的影响;因此,改变路段j的主线流量会影响其它路段的主线流量,从而影响其它路段的入口匝道流量。从以上分析可以看出,rj的改变会影响其它路段的入口匝道调节率,也就是说,各个入口匝道的调节存在耦合关系,是相互关联和相互协调的,而不是彼此孤立的。多匝道协调控制具有强的耦合性、非线性和时变性,这是入口匝道流量控制的难点。解决该难点问题的一种有效途径是建立宏观交通模型,然后采用系统分层和粒子群优化的PID控制器对该交通模型进行控制。
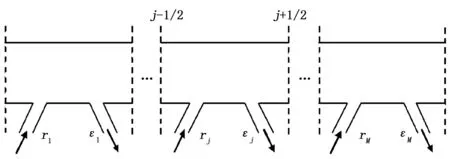
图1 高速公路多匝道系统的结构模型
1.2 宏观交通模型
交通控制系统中一般采用宏观交通模型[6]。设交通流满足一阶LWR(Lighthill-Whitham-Richards)宏观交通模型:
∂q/∂x+∂p/∂t=0
(1)
q=f(p)
(2)
式中,p和q分别代表交通流密度和流量,x是空间长度,t是时间。
式(1)是守恒方程,表示道路上的车辆数守恒,式(2)称为交通流基本图,反映现场的交通变量之间的函数关系。基本图满足:(a) 边界条件f(0)=f(pjam)=0,其中pjam为阻塞密度;(b) 存在一个临界密度pc,对应流量最大值f(pc)。当p∈(0,pc)时,f'(p)>0;当p∈(pc,pjam)时,f'(p)<0,即随着p增大,q减少,最终出现交通堵塞。
采用式(1)的偏微分方程描述的系统称为分布参数系统,由有限差分法可得到式(1)的数值式[1]:
pj(n+1)=pj(n)+
(3)
式中,pj(n),j=1,2,...,M是在时间步数n时第j个路段的交通密度,rj(n)和εj(n)分别表示在时间步数n时路段j的入口匝道和出口匝道流量。Δt是时间步长,lj是第j个路段的长度。fj+1/2表示数值流量,j+1/2表示路段j和路段j+1的分界处。fj+1/2计算方法如下:
当pj+1(n)≠pj(n)时,
-|μ|j+1/2(n)[pj+1(n)-pj(n)]}
(4)

当pj+1(n)=pj(n)时,
fj+1/2(n)=f[pj+1(n)]=f[pj(n)]
(5)
式(3)中第j个路段的出口匝道流量εj(n)为该路段流量f[pj(n)]的一部分,即:
εj(n)=sj(n)f[pj(n)],0≤sj(n)≤1
(6)
在有限差分法中,CFL(Courant-Friedichs-Lewy)条件是数值稳定性和收敛性判别条件,当式(7)的CFL条件成立时,式(3)的有限差分模型满足数值稳定性和收敛性[1, 3]。
(7)
因此,Δt和lj的参数选取需满足CFL条件。例如:选取f′[pj(n)]=νf=97.3 km/h,sj(n)=0.25,lj=1 km时,对应最大的时间步长为Δt=29.6 s。CFL条件的含义可理解为:以自由流速度vf行驶的车辆在一个时间步长内不能通过路段j,即:Δt·vf≤Δt[1+sj(n)]·vf≤lj。
2 多匝道协调控制系统的实现
2.1 协调控制系统结构
多匝道协调控制系统采用分层控制结构,其系统框图如图2所示,系统由协调控制层和直接控制层组成,其中协调控制层负责选取合适的交通模型,并根据各路段的交通条件确定期望密度轨迹;直接控制层根据密度偏差改变各入口匝道的调节率,使得各路段的实际密度达到期望密度值。
协调控制层考虑各路段的交通信息以及被控路段与其上游、下游的相互关联与影响,确定被控路段的期望密度。(1) 当路段没有出现交通拥挤时,在交通繁忙期间,期望密度设为临界密度的负邻域,这样既不会出现交通拥挤,又可维持较大的道路交通流量。(2) 当某个路段出现交通拥挤时,该拥挤路段的下游路段,期望密度仍设为临界密度的负邻域,这样可以为拥挤路段的车辆提供较大的出口流量容量,但对于拥挤路段的上游路段,期望密度应该减小,这可理解为通过降低该路段的上游交通流量来消除该路段的拥挤。
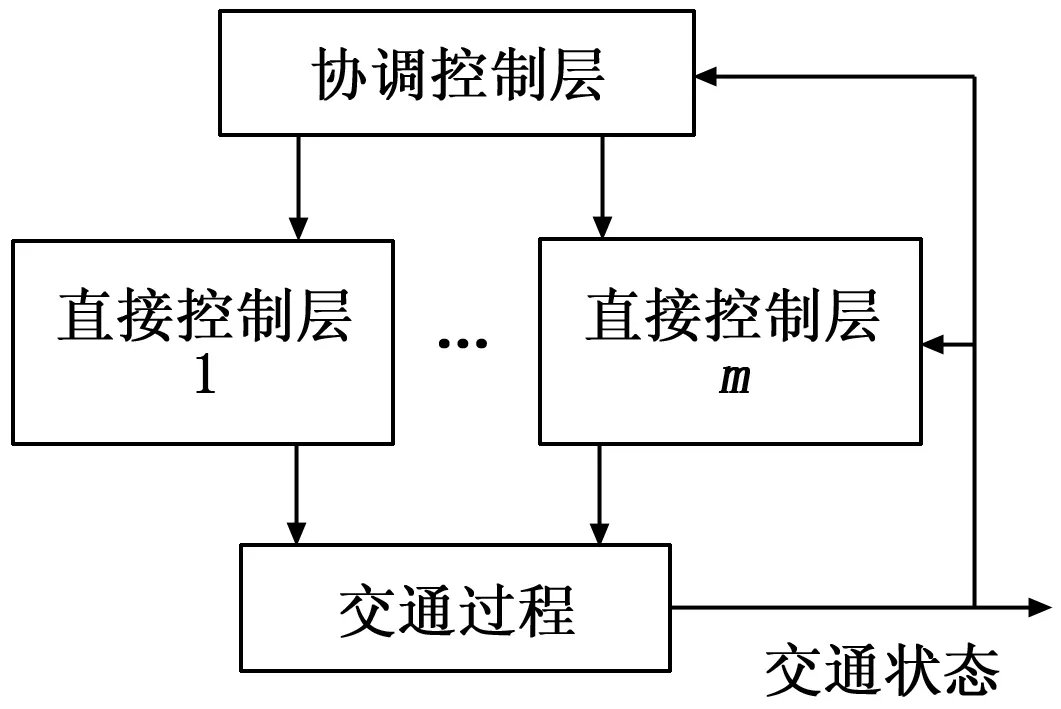
图2 多匝道协调控制系统框图
目前,PID控制器在工业控制领域被广泛应用,其中比例环节用于跟踪控制系统的偏差信号,从而减少偏差;积分环节可以消除静差;微分环节的作用是反映偏差信号的变化趋势,从而提高系统的响应速度。由于PID控制有诸多优点,因此本文直接控制层采用PID控制。
使用PID控制器关键在于参数的整定,一般的经验试凑法难以获得满意的结果,本文引入粒子群算法来实现多匝道PID参数的优化。
2.2 直接控制层的具体实现
路段j直接控制层的系统框图如图3所示。图3中的交通模型由协调控制层负责选取,协调控制层同时也决定模型参数,并确定路段j的期望密度轨迹pdj。图3的控制器是一种非线性的反馈型控制器,期望密度pdj(n)与实际密度pj(n)相比较,产生误差信号ej(n),误差ej(n)、ej(n-1)与ej(n-2)作用于PID控制器,得到uj(n),即:
Δuj(n)=kPj[ej(n)-ej(n-1)]+kIjej(n)
+kDj[ej(n)-2ej(n-1)+ej(n-2)]
(8)
uj(n)=Δuj(n)+uj(n-1)
(9)
式中,kPj、kIj和kDj分别是第j个路段PID控制器的比例系数、积分系数和微分系数,其数值由粒子群算法寻优来得到。PID控制器的输出uj(n)与路段j入口匝道调节率rj(n)相等,即:uj(n)=rj(n),rj(n)馈入到交通模型中产生实际的交通密度pj(n+1),pj(n+1)经一步延时后反馈到输入端。以上过程是第j个路段在时间步数n时的控制过程。
本文协调控制层选择1.2节的宏观交通模型,第j个路段的PID控制器产生下一步的控制信号rj(n+1)的具体控制过程如下:
对当前时间步数n,各路段的密度pj(n),j=1,2,...,M已知,由式(2)可求出各路段流量qj(n),j=1,2,...,M,通过式(4)和式(5)计算,可得到数值流量fj+1/2(n),j=1,2,...,M-1,再根据第n步的控制信号rj(n)由式(3)和式(6)求出pj(n+1),j=1,2,...,M,因此可求出密度误差ej(n+1),即:ej(n+1)=pdj(n+1)-pj(n+1),由ej(n+1)和以前时间步数的误差ej(n)与ej(n-1)再根据式(8)和式(9)就可通过PID控制器得到uj(n+1),也即得到rj(n+1)。
由以上过程可知,只要已知各路段的初始密度和初始调节率,则各路段的密度曲线和调节率曲线便可由上述步骤计算得到。
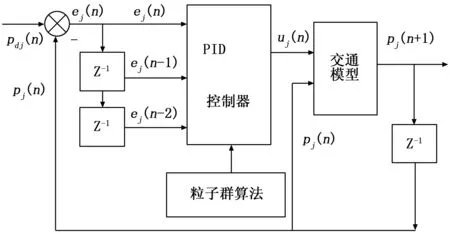
图3 路段j直接控制层的系统框图
2.3 粒子群算法参数优化
为了找到各个匝道最佳的PID参数kPj、kIj和kDj,本文采用改进的粒子群优化算法。两个改进措施为:1) 随着迭代次数的变化,动态改变惯性权值,从而提高粒子群优化算法的收敛性能;2) 采用粒子群优化的模拟退火算法,从而提高粒子群优化算法的全局优化能力。PID参数的优化过程如下:
1) 设置初始参数,例如:初始惯性权值、初始退火温度和初始退火速度。
2) 设置种群规模和初始种群范围,随机产生粒子群的初始种群。
3) 定义目标函数和适应度函数。目标函数E由式(10)定义,它是密度误差的平方和,而适应度函数是目标函数的倒数。
(10)
4) 计算每个粒子的适应度函数,并选择全局最优粒子。
5) 更新每个粒子的速度和位置。
6) 计算更新后的粒子群的适应度函数,选择个体的最优状态,并选择群体的全局最优位置。
7) 采用模拟退火算法更新个体的最佳位置和更新群体的全局最佳位置。
8) 重复以上步骤直到满足收敛准则或者达到最大的迭代次数。
9) 输出各个匝道最佳的比例系数、积分系数和微分系数。
3 仿真案例
对图2所示的多匝道协调控制系统进行仿真实验,以一段长9 km、双向4车道的高速公路为仿真对象,按每段1 km分成9段,假设第3段、第5段和第7段各含一个入口匝道,第2段和第5段各含一个出口匝道。设主线的上游进口流量为0~1 500辆/小时/车道,各入口匝道交通需求范围为0~1 000辆/小时。协调控制层选择1.2节的宏观交通模型,并选择式(2)的流量-密度关系方程为Green-Shields提出的关系式[6],即:
q=f(p)=vf(p-p2/pjam)
(11)
式中,取vf=97.3千米/小时,pjam=74.0辆/千米/车道,对应最大交通容量qm=1 800.0辆/小时/车道,临界密度pc=37.0辆/千米/车道。
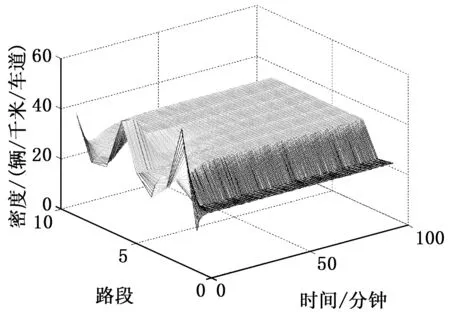
图4 各路段实际交通密度变化三维图
选择期望密度pd为34.0辆/千米/车道,9个路段的初始密度分别设为16.0,54.0,27.5,21.0,28.0,46.0,25.0,24.0和41.0辆/千米/车道,其中第2路段、第6路段和第9路段存在交通拥堵。由于第3路段、第5路段和第7路段有入口匝道控制器,因此协调控制层必须确定这3个路段的期望密度轨迹。第3路段的上游路段有初始拥挤,但第3路段的下游路段无初始拥挤,因此第3路段的期望密度从初始值上升到期望值34.0辆/千米/车道。同理,第7路段的期望密度从初始值上升到期望值34.0辆/千米/车道。但是,由于第5路段的
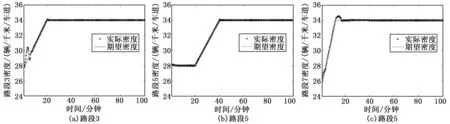
图5 密度跟踪曲线
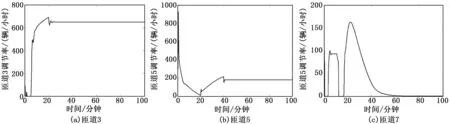
图6 入口匝道调节率变化曲线
下游路段有初始拥挤,因此第5路段的期望密度开始时维持较低的水平,然后再上升到期望值34.0辆/千米/车道,这样有利于路段6消除拥挤。
仿真时间步长选为Δt=20s,式(6)的出口流量系数为sj(n)=0~0.25。通过协调控制层得到各路段的期望密度后,由直接控制层实施PID控制,PID控制器的比例系数、积分系数和微分系数由粒子群算法优化得到。
用Matlab软件编写仿真程序,粒子群算法得到最优值为kP3=130.093 6,kI3=275.700 7,kD3=41.210 5,kP5=330.305 5,kI5=355.890 6,kD5=85.436 7,kP7=235.293 1,kI7=316.275 9,kD7=62.184 2。所有路段的实际交通密度变化三维效果图如图4所示,可见,开始时在路段2、路段6和路段9都存在严重拥堵,经协调控制后,路段2和路段9大约过了8分钟,路段6大约过了13分钟,交通状态进入正常流量的稳定区域,最后达到期望密度,消除了拥堵。有入口匝道的路段密度跟踪曲线如图5所示,可见,实际的交通密度可以跟踪期望的交通密度,说明协调控制系统具有良好的动态和稳态性能。各入口匝道车辆调节率如图6所示。
4 结论
本文采用大系统分层控制策略和粒子群算法对高速公路多匝道进行了协调控制,将多匝道控制问题按不同的任务分解成协调控制层和直接控制层,前者负责模型选择、参数调整和确定期望密度,后者采用PID控制器实施控制,并引入粒子群算法对PID控制器的比例系数、积分系数和微分系数进行优化,以改善控制系统的动态性能。基于Matlab的9个路段仿真结果表明,当其中3个路段存在严重拥堵时,系统达到期望密度的平均时间约为13分钟,反映了系统具有良好的动态性能,能有效消除交通拥堵和维持主线交通流稳定。
[1]李 健. 匝道交通控制理论与方法 [M]. 北京: 北京交通大学出版社, 2013.
[2]Ali Sercan Kesten, Murat Ergün, Tetsuo Yai. An analysis on efficiency and equity of fixed-time ramp metering [J]. Journal of Transportation Technologies, 2013, 3(2A): 48-56.
[3]Liang X R, Lu Q, Lin P Q, et al. Freeway ramp metering using fuzzy logic and genetic proportional control [J]. Traffic Engineering & Control, 2015, 56(2): 219-225.
[4]Ioannis Papamichail, Apostolos Kotsialos, Ioannis Margonis, et al. Coordinated ramp metering for freeway networks-A model-predictive hierarchical control approach [J]. Transportation Research Part C, 2010, 18(3): 311-331.
[5]Meshkat A, Zhi M, Vrancken J L M, et al. Coordinated ramp metering with priorities [J]. IET Intelligent Transport Systems, 2015, 9(6): 639-645.
[6]梁新荣, 刘艳艳, 满国永, 等. 基于小脑模型关节控制器与PID复合的高速公路交通流密度控制 [J]. 控制理论与应用, 2013, 30(10): 1281-1286.
[7]涂辉招, 王 颖, 谢欣睿. 基于定量分层模型的多匝道协调控制次序 [J]. 同济大学学报(自然科学版), 2017, 45(1): 39-45.
[8]张 伟, 肖日东, 邓 晶. 基于遗传算法的动态模糊神经网络城市快速路入口匝道控制 [J]. 公路交通科技, 2017, 34(2): 129-134.
[9]王兴宇, 吴文祥. 基于交通流预测的入口匝道模糊控制研究 [J]. 工业控制计算机, 2017, 30(1): 1-2.
[10]Pasquale C, Papamichail I, Roncoli C, et al. Two-class freeway traffic regulation to reduce congestion and emissions via nonlinear optimal control [J]. Transportation Research Part C, 2015, 55(1): 85-99.
[11]Hou Z S, Xu J X, Yan J W. An iterative learning approach for density control of freeway traffic flow via ramp metering [J]. Transportation Research Part C, 2008, 16(1): 71-97.
[12]柴 干, 谢永利. 高速公路匝道多性能指标优化控制方法 [J]. 中国公路学报, 2012, 25(6): 115-122.
[13]王 浩, 时柏营, 杨晓光. 自组织式交通信号协调控制模型 [J]. 计算机测量与控制, 2012, 20(11): 2979-2982.
