空间载荷中利用调制光源去除PSD背景光影响的方法
2018-03-22杨鲁新董文博
杨鲁新,董文博,2
(1.中国科学院空间应用工程与技术中心,北京100094;2.中国科学院空间应用重点实验室,北京100094)
1 引言
位置敏感探测器(Position Sensitive Detector,PSD)是非接触精密测量领域一种常用的光电感应器件,基于非均匀半导体的横向光电效应,可以将入射光点转换成连续的位置数据,具有分辨率高、线性度好、响应速度快、光谱响应范围广、工作电路简单等特点[1],广泛应用于工业自动控制、武器制导与控制、空间光电设备及空间科学应用载荷。近几年我国载人航天事业飞速发展,空间科学应用研究进步显著,在各种空间应用精密控制载荷中,PSD都发挥了重要的作用,例如主动减振装置的相对位姿测量[2⁃3]、微弱振动检测[4⁃5]、机器人手臂的三维位姿测量[6⁃7]等。但是在测量过程中,PSD的测量精度往往受到背景光的影响[1⁃3]。背景光照射到PSD上会产生相应的光电流,并叠加到有效信号上,使得光斑测算位置偏离正常值。所以PSD一般用于较暗的环境或者专门制作的暗箱,增大了工作量,增加了成本,应用范围受到了限制。
目前消除背景光影响的方法大致有两种:光学法和电学法。光学法一般是在PSD上加装与光源的频段匹配的滤光片,可以滤掉大部分背景光[1]。但有时候背景光与光源的频段相同,因此用电学法去解决。具体的,可以通过加反偏电流的方法来消除背景光和暗电流的影响[2],也有人利用多光束相位法进行检测[8]。在这些措施的基础上,还可以通过软件滤波的方法从频域上改善精度位移测量的性能[9⁃10]。
本文对电学法展开研究,通过光源调制和信号处理的手段,提出一种能够有效抑制背景光的PSD位置检测系统概念。与加固定反偏电流消除背景光和暗电流的方法不同,该方法将光源调制为脉冲光信号,从而实现对背景光进行动态检测和消除,以期可以适用于背景光变化的场景,从而扩大PSD的应用范围,并保留比多光束相位法硬件结构更简单、信号处理误差更小、测量精度更高的优点。
2 利用光源消除背景光影响的方法
2.1 PSD结构及测量方法
本系统选用图1所示四边形结构二维PSD(45 mm ×45 mm),工艺简单,暗电流小,易于加反向偏置,但电极间相互影响,非线性失真较大。由于近中心区域线性度较好,故检测区域设定在近中心区域(20 mm×20 mm)内,以减小非线性误差。

图1 PSD原理示意图Fig.1 Schematic diagram of PSD
以中心点为坐标原点,则该PSD光点位置的解算公式如式(1):

式中,I1~I4分别为四个电极输出的对应电流值,L为PSD的边长。
2.2 消除背景光影响的方法
背景光所产生的误差是由于背景光照射到PSD上,产生相应的光电流,叠加到光源所产生的光电流上,使得采集的信号高于正常值,最终导致解算位置的偏差。
本系统采用采样⁃保持的思想,首先将光源调制为一定频率的脉冲光信号,PSD的响应信号则为脉冲电信号。在响应信号的高电平和低电平处分别进行采样,高电平处采集的信号为光源和背景光叠加产生的信号,低电平处采集的信号为背景光产生的信号。将两组数据传输到数字信号处理(Digital Signal Processing,DSP)后,由 DSP 对两组数据对应做差值,得到四个电极去除背景光成分的实际位置电压值。为了测量的准确性,需将其进行平均值滤波,然后经式(1)解算,从而得到光斑坐标。
此方法适用于背景光强度变化频率小于100 Hz的场景。本文所进行的试验,背景光由日光灯产生,发光频率为100 Hz,其他低于该频率的场景均可应用本文所提出的方法。
3 测量系统设计
3.1 硬件系统设计
本系统硬件部分主要由光源及驱动电路、PSD探测器、采集调理电路、A/D转换电路、DSP和PC机等几部分构成,系统结构如图2所示。由于PSD光敏面近中心区域的线性度较好,故本系统选择光敏面较大的sitek公司的2L45_SU24型PSD,有效光敏面为45 mm×45 mm,非线性误差仅为0.3%,从而保证测量的线性度和准确性。下面将详细介绍各部分的设计思路。

图2 系统框图Fig.2 System block diagram
3.1.1 调制光源及驱动电路设计
PSD所用的光源主要有发光二极管(Light E⁃mitting Diode,LED)和激光二极管(Laser Diode,LD)两种。LED驱动控制简单,亮度可通过限流电阻大小进行控制,价格便宜,体积小,重量轻,但能量不集中,光线发散,照明距离有限。相反,LD能量集中,光斑小,照明距离长,但驱动控制复杂,亮度无法控制,温度敏感,热稳定性差。试验场景中以日光灯模拟背景光环境。日光灯由50 Hz正弦电信号驱动,发光频率为100 Hz,其光谱为非连续光谱,光谱能量主要集中在可见光波段,而在红外波段也有少量能量分布。综合考虑,我们选用一种高会聚率LED,其带有聚焦透镜,光线指向性小于2%。该二极管光源响应时间为10 μs,波长主要集中在800 nm~900 nm之间,属于红外波段。因此系统在PSD上配合使用红外滤光片,该滤光片对800 nm~1600 nm的红外光波段有90%的透过率,对400 nm~680 nm的可见光波段的透过率小于5%,而对680 nm~800 nm的近红外波段的透过率约为40%,因此可与滤除大部分的背景光,而对光源基本没有影响。
由于DSP的IO口负载能力较弱,故设计图3所示的三极管驱动电路,以实现DSP对光源的快速控制。

图3 光源驱动电路Fig.3 LED driving circuit
图中,DSP⁃A2接口接 DSP的控制管脚,D1为发光二极管,R1为限流电阻,通过改变其大小可以改变发光二极管的亮度。
3.1.2 信号采集调理电路设计
由于PSD输出的是微弱的电流信号,不能够被A/D直接采集,故设计电流电压转换及放大电路将其转换为易测量的电压信号。随后由DSP驱动AD进行采集,进行平均滤波及位置解算。PSD共有四路电流输出,以其中一路为例,采集调理电路如图4所示。
图中,Port1端口连接PSD的引脚1,AIN0端口连接AD的AIN0通道。

图4 信号调理电路Fig.4 Signal conditioning circuit
3.1.3 A/D转换电路设计及DSP选型
由于本系统对精度和速度的要求较高,为了同时保证精度和转换速率,本系统选用了德州仪器公司的24 bit的ADS1258作为本系统的A/D转换芯片,其采用SPI通信,固定通道转换速率125 kSPS,自动通道扫描模式下,每个通道的转换速率可以达到23.7 kSPS,满足的本系统的需求。根据 TI公司 ADS1258 的 datasheet[11]设计图 5 所示电路。

图5 A/D转换电路Fig.5 A/D converting circuit
DSP主控选用德州仪器公司专门面向控制领域的TMS320 F2812,主频150 MHz,32位中央处理器,外设资源丰富。
3.2 软件系统设计
本系统软件部分的设计主要是DSP主控程序的编写,其主要任务包括:光源的控制与调制程序的编写、ADS1258驱动采集与通信程序的编写、DSP与PC机串口通信程序的编写。
系统整体控制思路如下:首先初始化系统外设、接口、定时器等,使定时器每2 ms产生一次中断,标志位置1;然后在主函数的无限循环语句中检测该标志位,当标志位为1时,进入处理函数,重置该标志位(置0),并在光源开启和关闭的状态下分别控制ADS1258扫描四个通道的电压值,对应相减得到四个通道的电压差值;随后进行平均值滤波,带入解算公式中即可得到光斑位置;最后通过串口发送函数将位置数据发送到PC机上显示。主程序流程图如图6所示。
3.3 PSD标定
由于PSD的放置存在一定的误差及零偏差,即PSD移动的坐标系和零点与测量的坐标系和零点不吻合,所以会产生解算位置的错位,造成测量误差。此误差可以通过最小二乘归一化的方法对数据点进行标定,使得数据点的散点图连线与坐标轴平行[12]。 设 PSD 标定点的坐标为(x,y),校正后的标定点坐标为(x∗,y∗),则可设式(2):

图6 流程图Fig.6 Flowchart of software

其中,a、b、c、d 为待估计参数,ek1、ek2为估计误差。进行L次测量后得到L个数据点,以x∗为例,对式(2)系统进行最小二乘估计有式(3):

根据式(3)即可估计得到待估计参数a和b,相同方法可得参数c和d,然后代入式(2)即可得到校正后的数据点。
4 测试系统和测试结果
4.1 精度测试与分析
精度是指在同一条件下,同一位置处采集若干个点,位置偏移范围的大小。此测试以PSD中心为原点建立坐标系,在背景光下光源调制前与调制后分别选取四个位置,每个位置采集100个点来测试其精度并加以对比。图中,横纵坐标为测试点在该坐标系中的位置,图示数据为未经过标定的原始数据。
4.1.1 光源未调制精度测试
在背景光下采用未调制光源,选取(-3 mm,3 mm)、(3 mm,3 mm)、(3 mm,-3 mm)、( -3 mm,-3 mm)四个点进行测试,测试结果如图7所示。
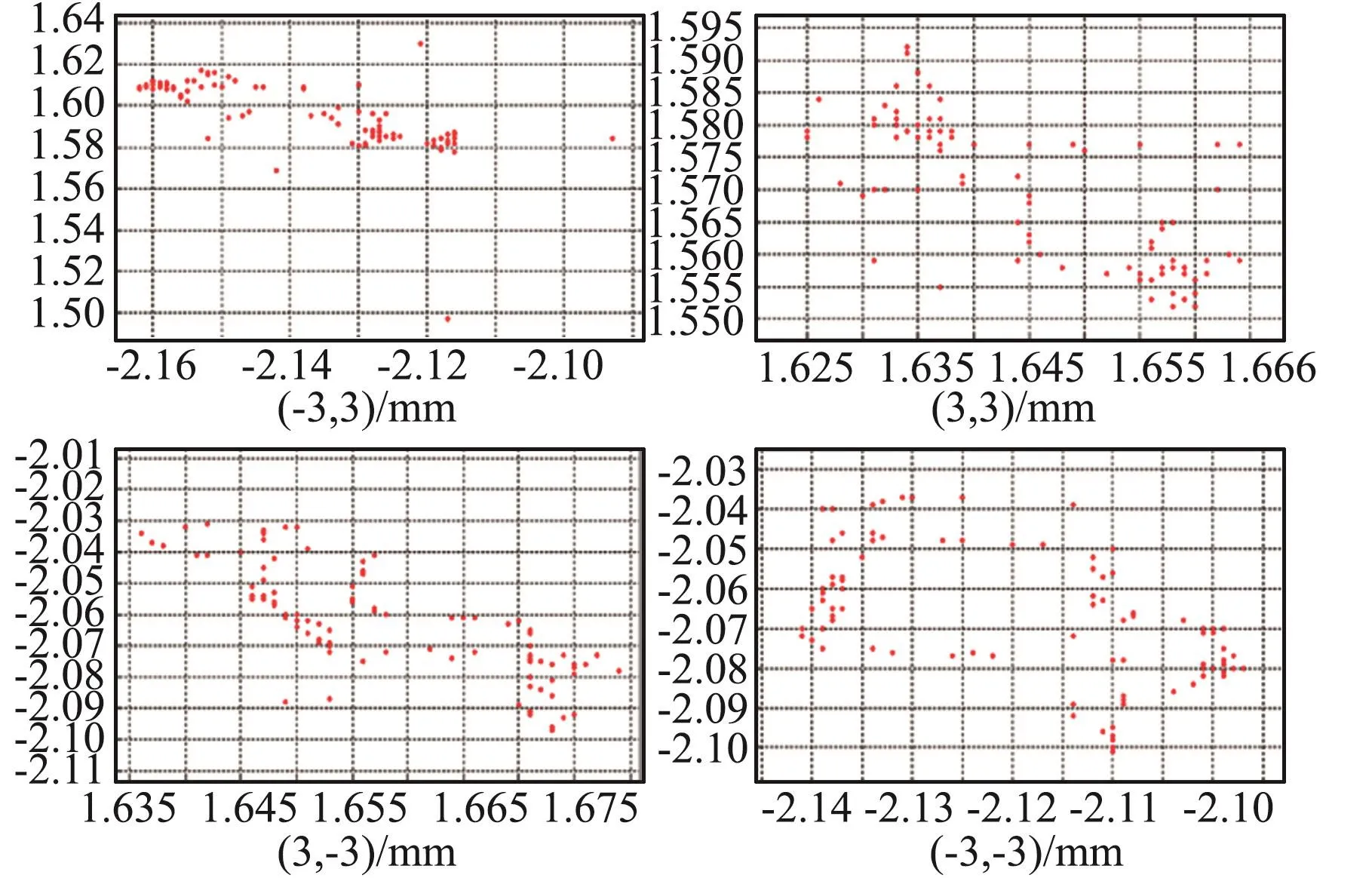
图7 光源未调制精度测试数据Fig.7 Precision test data without light modulation
由图7可以看出,在光源未调制及背景光存在的环境下,四个位置的位移偏移范围分别为70 μm ×140 μm,40 μm ×40 μm,45 μm ×70 μm,45 μm ×70 μm,其精度超过100 μm。
4.1.2 光源调制后精度测试
在背景光下采用调制光源,选取(-3 mm,3 mm)、(3 mm,3 mm)、(3 mm,-3 mm)、( -3 mm,-3 mm)四个点进行测试,测试结果如图8所示。

图8 光源调制后精度测试数据Fig.8 Precision test data with light modulation
由上图可以看出,在调制光源及背景光存在的环境下,四个位置的位移偏移范围分别为9 μm×13 μm,10 μm × 13 μm,10 μm × 12 μm,10 μm×15 μm,其精度可达到15 μm。
4.1.3 对比分析
在背景光存在条件下,使用未调制光源时,其精度超过100 μm,但光源经过调制后,其精度可以达到15 μm,精度大大提高,说明本系统完全可以保证背景光下测量的精度。
4.2 线性度测试与分析
PSD的线性度是指PSD的实际位置与测量得到的位置之间的线性关系程度。同样以PSD中心为原点建立坐标系,其测试方法为:选取一定数量的点阵,把每个点的实际值与经过标定后的测量值进行比较,取差值。利用精密位移台,生成从(-9 mm,-9 mm)到(9 mm,9 mm)的49个点的数据(每3 mm一个),每个点取100次数据。利用Matlab标定程序通过最小二乘法进行标定,确定线性误差及标定系数。
4.2.1 光源未调制线性度测试
当光源未调制且有背景光存在时,经过标定后的测量点(红色)与基准点(蓝色)如图9所示。经过计算得出,其平均线性误差为48 μm,最大线性误差为111 μm,标定系数分别为 a=1.6,b=0.008,c=0.004,d =1.648。

图9 光源未调制线性度测试数据Fig.9 Linear test data without light modulation
4.2.2 光源调制后线性度测试
当光源调制后且有背景光存在时,经过标定后的测量点(红色)与基准点(蓝色)如图10所示。经过计算得出,其平均线性误差为13 μm,最大线性误差为36 μm,标定系数分别为a=1.072,b=0,c=0.003,d=1.068。

图10 光源调制后线性度测试数据Fig.10 Linear test data with light modulation
4.2.3 对比分析
对比可知,光源调制后,平均线性误差由48 μm减小到 13 μm,最大线性误差由 111 μm 减小到36 μm。采用调制光源后,本系统的线性误差大大下降,说明本系统可以有效降低背景光下PSD的线性误差。
5 结论
本文设计的PSD测量系统借助光学手段和调制思想,用滤光片滤除可见背景光,并将光源调制为脉冲光,通过高精度A/D采集并由DSP进行快速的差值、滤波、坐标运算,实现了消除背景光的目的。试验结果证明,该系统在背景光存在的条件下,精度可以达到15 μm,平均线性误差仅为13 μm,最大线性误差为36 μm,采样周期为最小2 ms,可以完全去除背景光的影响,有效地提高相对位移的精度。另外,在消除背景光影响的同时,PSD的暗电流对测量结果的影响也可以得到有效抑制,进一步提高了其测量精度。
(
)
[1] 黄梅珍.位置敏感探测器的研究[D].杭州:浙江大学,2001.Huang Meizhen.Study on Position Sensitive Detector[D].Hangzhou: Zhejiang University, 2001.(in Chinese)
[2] 罗军,贾建援,张向峰.PSD在双层主动隔振系统中的应用[J]. 自动化仪表, 2005, 26(4): 32⁃34.Luo Jun, Jia Jianyuan, Zhang Xiangfeng.Application of PSD in two⁃layer active vibration isolation system[J].Process Au⁃tomation Instrumentation, 2005, 26(4): 32⁃34.(in Chi⁃nese)
[3] 李宗峰.空间微重力环境下主动隔振系统的三维位置测量[J]. 宇航学报, 2010, 31(6): 1625⁃1629.Li Zongfeng.3D Position measurement of active vibration iso⁃lation system under space microgravity[J].Journal of Astro⁃nautics, 2010, 31(6): 1625⁃1629.(in Chinese)
[4] 杨建军,张俊,张龙,等.基于PSD的模型姿态角和振动测量技术原理性研究[J].实验流体力学,2012,26(4):79⁃83.Yang Jianjun, Zhang Jun, Zhang Long, et al.Principle and method research for optical measuring system of model attitude angle and vibration based on PSD[J].Journal of Experiment in Fluid Mechanics, 2012, 26(4): 79⁃83.(in Chinese)
[5] 高经伍,隋金雪,赵凤华.PSD在弦振动测量中的应用[J]. 仪表技术与传感器,2005,9:30⁃31.Gao Jingwu, Sui Jinxue, Zhao Fenghua.Application of PSD for vibration measure[J].Instrument Technique and Sensor,2005, 9: 30⁃31.(in Chinese)
[6] 刘兴占,张令波,孙富春.利用PSD的柔性臂末端振动测量系统[J]. 计量技术,2000(3):10⁃13.Liu Xingzhan, Zhang Lingbo, Sun Fuchun.The vibration measurement system for the end of flexible arm based on PSD[J].Measurement Technique, 2000(3): 10⁃13.(in Chi⁃nese)
[7] Blank S,Shen Y,Xi N,et al.High precision PSD guided robot localization: design, mapping, and position control[C] //IEEE/RSJ Int’ l Conf.Intelligent Robots and Sys⁃tems.USA.Oct29.2007:52⁃57
[8] 孙先逵.PSD相位法多光束同步检测技术研究[D].重庆:重庆大学,2005.Sun Xiankui.Study on Technology of detecting Synchronously Multiple Light Beams based on Position⁃Sensitive Detector Phase Positioning Method[D].Chongqing: Chongqing Uni⁃versity, 2005.(in Chinese)
[9] 莫长涛,陈长征.二维PSD非线性修正共轭梯度算法[J]. 东北大学学报,2003,24(5): 507⁃509.Mo Changtao,Chen Changzheng.Conjugate gradient optimum algorithm of non⁃linear correction of two⁃dimension PSD[J].Journal of Northeastern University, 2003, 24(5): 507⁃509.(in Chinese)
[10] Zhang F, Li Y,Li H,et al.Compensation method of PSD’s background light based on improved BP neural network[C]//2012 International Symposium on Instrumentation & Measure⁃ment, Sensor Network and Automation ( IMSNA), Aug,2012: 151⁃153.
[11] Texas Instruments.ADS1258: 16⁃channel, 24⁃bit analog⁃to⁃digital converter[EB/OL]. (2011)[2017].http://www.ti.com/lit/ds/symlink/ads1258.pdf
[12] 陈虎,董文博,吕世猛.精密PSD自动标定测试设备的研制和应用[J]. 光学精密工程,2013,21(12):200⁃206.Chen Hu, Dong Wenbo, Lv Shimeng.High⁃precision instru⁃ment for PSD calibration test[J].Optics and Precision Engi⁃neering, 2013, 21(12): 200⁃206.(in Chinese)