铁路接触网巡检无人车自动定位系统研究
2018-03-21朱家诚吴焱明马开峰
朱家诚,吴 彬,吴焱明,马开峰
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
1 引言
铁路接触网沿铁路线上空布置,为电力机车提供动力,对铁路正常运行起着关键作用。随着我国电气化铁路的快速发展,铁路接触网系统可靠性,稳定性显得尤为重要[1]。所以铁路接触网的定期检测维护工作也必不可少,目前国内主要检测方式有两种。
(1)人力车梯检修,需配置七至八人,携带检测设备,沿着铁路线对铁路接触网逐一检测。耗时又费力,恶劣的环境下检修,作业人员也存在安全隐患。
(2)使用燃油大型检修作业车来完成接触网的检测,燃油检修车必须从车站出发,不能从铁路中段上铁轨,紧急故障处理不便利,且不符合可持续发展理念[2]。
我们受上海铁路局合肥供电段委托,已经研制了一种自行式电气化铁路接触网检修车梯[3]。使用该车梯作业效率较大提高,可减少多名检修作业人员,同时能够减轻作业人员的劳动强度,目前已经有多台在试用。
考虑到自行式车梯巡检过程单调,重复性强,检测设备也是专业设备。所以原有的自行式车梯的基础上研制一台具备自动定位功能的无人车,在接触网立柱位置自动停车,利用车上搭载的检测设备,实现接触网检测。很大程度上节约了劳动力,对铁路接触网检测和维护作业的发展有着重要的发展意义和经济意义。
2 系统组成
无人车基本组成包括机械结构系统和控制系统。其机械结构主要组成是底盘,车身机构和工作平台,其整体机械结构可拆卸,易组装。其控制系统以工控机为上位机,PLC为下位机,上位机及下位机软件程序都采用模块化设计。控制系统结构,如图1所示。硬件主要包括嵌入式工控机[4]、PLC、直流伺服电机及其驱动器、无线遥控器以及接收器、工业相机等。

图1 控制系统结构Fig.1 Structure Diagram of Control System
无人车的动力源为一个48V30Ah的可充电锂电池。从性能要求以及工作环境选择直流伺服电机作为无人车的执行机构,选择ARK-1550嵌入式工控机作为控制系统上位机。从输入输出I/O点数,性能要求,成本,可靠性以及或留有富余量等角度考虑,选择欧姆龙CP1H系列PLC[5]。选择海康威视的工业相机,其用户开发环境开放,其性能也满足需求。以PLC为下位机的主要内容包括:
(1)伺服驱动模块。可以手动控制电机按设定速度和设定位置运动。在手动调整过程中可以检测执行机构精度,对机械部件进行调整。
(2)通讯模块。包括发送和接收两个功能块,主要是将运动部件的动作信息发送到上位机,接收上位机传送过来的运动指令,从而实现上位机对下位机的控制。
(3)故障报警及处理模块。无人车在铁轨出现遇到故障致使电机异常时,报警信号由PLC传至上位机。上位机通过GPS模块将无人车的位置信息通过短信功能发送到工作人员。工作人员及时前去处理。
(4)无线遥控器模块。无线遥控器接收器信号直接接到PLC的输入,无线遥控器可以直接通过PLC向电机发送指令,实现电机的快进、快退、点进、点退等。
以工控机为上位机的控制系统主要内容包括:
①人机界面模块。主要包括手动调整界面和自动运行界面。人机界面可以对无人车的运行状态进行实时监控,有利于调试和实验。
②串口通讯模块。选择通讯方式,按照定制的通讯协议,实现上位机和下位机间命令、状态和信息的传递[6]。在系统运行过程中,上位机与下位机之间的数据交换频率高,所以通讯逾时对系统运行效率有着重要影响,在保证正常通讯的条件下,提高通讯波特率,可减小通讯逾时。
③拍照模块。实现上位机对工业相机的控制。可通过上位机命令设置相机拍照模式,包括初始化、连续拍照、拍照间隔时间、停止拍照、自动存储图片、自动打开图片等。
④图像识别模块。研制了一套图像识别系统,该系统集成了灰度化、二值化、边缘检测、Hough变换等多种算法。对工业相机采集的图片进行图像特处理,并将图像处理结果的信号转换为上位机命令。
3 图像识别
无人车的自动定位是以图像识别模块来实现的。图像识别系统主要是对工业相机采集的照片做图像处理。图像识别系统目的就是要识别出来接触网立柱的特征。
铁路接触网立柱的直线特征明显,针对直线特征的检测,可利用Hough变换原理来实现接触网立柱特征识别。
Hough变换的基本原理:就是平面坐标系和参数坐标系的一个转换。Hough变换原理[7],如图2所示。

图2 Hough变换原理图Fig.2 Principium Chart of Hough Transform
假设在x-y平面坐标系上有直线方程:

该直线上有点:
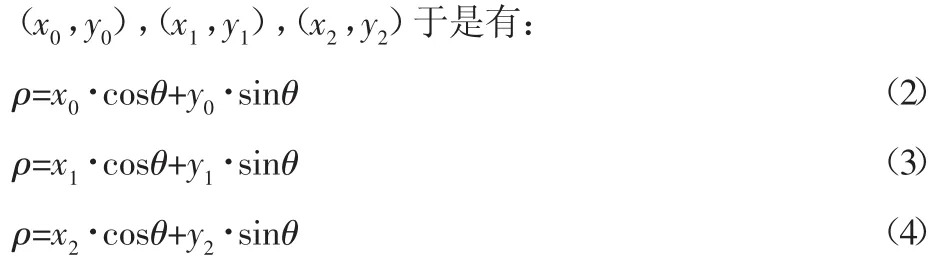
所以平面坐标系的三个点对应着参数坐标系里的三条曲线。在ρ-θ参数坐标系中,曲线②③④都过点(ρ,θ),且直线①上的每一个点对应的曲线都经过该点。因此对边缘检测后的图像,对其每一个非零像素点,在参数坐标下变换成一条曲线,那么平面坐标系中属于同一条直线上的点在参数坐标系中形成多条曲线并相交于一点。因此可用Hough变换原理进行直线检测[8]。
Hough变换算法测试的结果,如图3所示。原图中直线m,n,h和一个圆,按照图像识别流程,最后经过Hough变换处理得到其变换矩阵以及其变换结果。变换矩阵所展示的参数坐标系中有a,b,c三个累加点分别对应m,n,h三条直线。变换结果则是成功提取出三条直线特征。

图3 直线检测结果Fig.3 Result of Straight Line Detection
在进行直线检测过程中,可先对原始图像进行灰度化、二值化的处理,然后对二值图像做图像腐蚀处理,图像腐蚀后进行边缘检测,最后Hough变换的过程则是将边缘检测后的图像上的直线特征提取出来。图像识别系统里图像处理的主要流程,如图4所示。

图4 图像识别流程图Fig.4 Picture of Image Recognition Process
由工业相机直接采集的图片为彩色图像,像素为宽度1920*高度1080。其图像格式为RGB,其每一个像素点的区间为(0,0,0)~(255,255,255)。经过灰度化处理以后,彩色图像变成8位的灰度图像,即黑白图像,由黑到白,其颜色深度由灰度值决定,其灰度值范围是(0~255)。灰度图像经过二值化处理,则变成一个二值灰度图像,只有黑和白,其像素值为0或1。对二值图像进行图像腐蚀处理不仅可以消除没有意义的边界点,还可以收缩边界,有利于对图像中直线特征的分析与识别。
4 自动定位方法研究
自动定位的关键在于:如何通过从图像中接触网立柱的位置信息来判断无人车实际与接触网立柱之间的距离。为此,设计实验研究定位算法。实验中工业相机采集接触网立柱特征的图像模型,如图5所示。
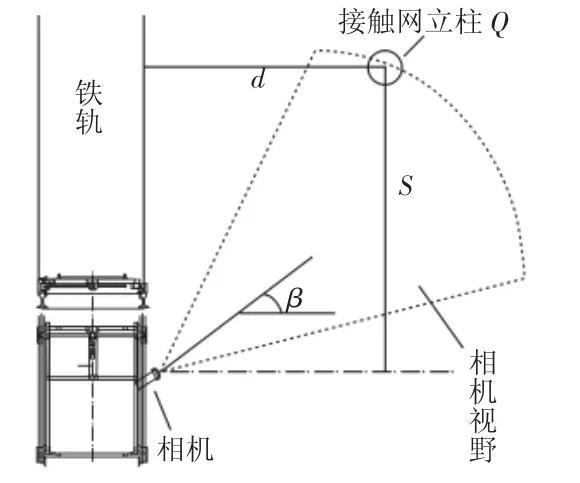
图5 拍照模型Fig.5 Model of Taking Photo
工业照相机安装在无人车底盘上,相机安装角度β可以调整,以接触网立柱Q为目标位置,d是铁路距离立柱的横向垂直距离,可以测得d等于3050mm。S则是相机距离接触网立柱的纵向直线距离。实验过程中,选定一个角度β,沿铁轨推动底盘改变S进行图像采集拍照。将获得的多组照片,通过软件测量出图像中接触网立柱位置的横坐标x,其单位为像素,记录距离S和横坐标x。依次设置角度β等于30°,45°,60°,获得多组数据。
统计实验数据,绘制出x-S曲线图,如图6所示。
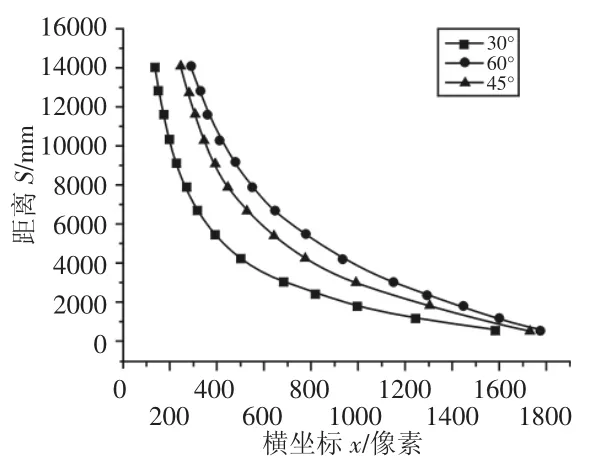
图6 横坐标-距离曲线Fig.6 Abscissa-Distance Curve
通过拟合的曲线方程,得到数学方程式为:

式中:S0,A1,x0—常数。
由图6可发现角度发生改变以后,曲线基本特征不变,所以对应的数学方程式不变,只是方程参数发生变化。
自动定位流程设计,如图7所示。自动运行启动后,无人车开始加速直至匀速前行,拍照系统启动,工业相机开始间隔采集图像,图像识别系统进行图像处理,识别特征。当检测到接触网立柱特征,无人车开始减速,并通过提取图像中接触网立柱的位置信息,由上位机算法计算接触网立柱与无人车的实际距离S。逐渐靠近接触网立柱位置,速度越来越小,误差逐渐减小,S逐渐也减小,直至S小于设定误差δ,无人车停车。
图7 自动运行流程图Fig.7 Automatic Location Flowchart
5 定位测试
在铁路天窗期,对无人车进行了定位测试,工业相机安装角度为45°,因此软件设计中使用的横坐标-距离数学关系式为:

铁路接触网立柱之间的距离大约为50m,在自动运行过程中,当系统检测到立柱特征时,减速信号来临,无人车开始减速,其减速曲线,如图8所示。由图8可知,当S=10m位置,按S型曲线减速行驶。当S<5m时,其运动规律则是减速(A)和匀速相间(B),直至 S<0.6m,保持 v=20mm/s低速前行,直至 S<=30mm,无人车停车。
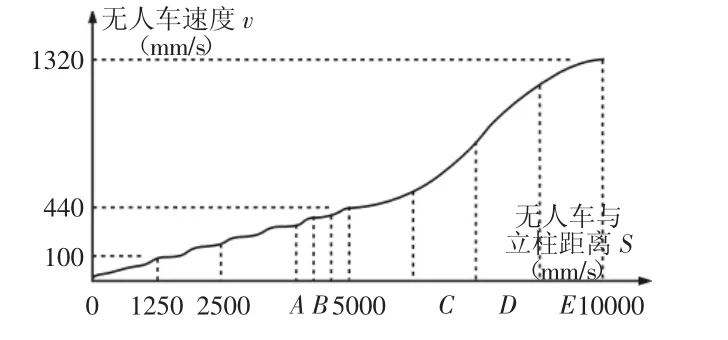
图8 减速曲线Fig.8 Deceleration Curve

图9 图像识别手调界面Fig.9 Manual Operation Interface of Image Recognition
图像识别系统手调界面,如图9所示。图9中A为接触网立柱原图,该图是在铁路现场定位测试过程中所采集的一张照片。图9中B则是经过图像处理之后的结果,能够提取出其直线特征。现场定位测试结果表明:图像识别能够提取接触网立柱直线特征,实验得到的横坐标-距离关系式可靠,无人车自动减速至停车的过程平稳,且能够定位到接触网立柱位置,基本符合预期要求。
6 结语
通过上位机的软件设计,以及PLC程序设计,铁路接触网巡检无人车自动定位系统已初步研究完成,其控制系统以工控机为核心,利用工业相机采集接触网立柱的照片,利用图像识别检测接触网立柱特征,并实现定位至接触网立柱位置。目前铁路接触网巡检无人车现场的初步调试已完成。
[1]黄立杰.浅谈电气化铁路接触网检修[J].黑龙江科技信息,2013(16):21.(Huang Li-jie.Discussion on inspection and maintenance of the railway catenary[J].Heilongjiang Science and Information,2013(16):21.)
[2]王开元,吴焱明,兰毅.新型铁路接触网检修车梯的控制系统设计[J].机械设计与制造,2016(2):150-152.(Wang Kai-yuan,Wu Yan-ming,Lan Yi.The design of control system for the new car ladder for overhauling of railway catenary[J].Machinery Design&Manufacture,2016(2):150-152.)
[3]朱家诚,安坤,马开峰.自行式电气化铁路接触网检修车梯的研制[J].机械设计与制造,2016(3):146-149.(Zhu Jia-cheng,An Kun,Ma Kai-feng.Development of self-propelled electrified railway catena maintenance of vehicle ladder[J].Machinery Design&Manufacture,2016(3):146-149.)
[4]李彩萍.浅谈工控机在工业自动控制中的应用及前景[J].企业技术开发,2011(12):80-81.(LiCai-ping.IntroductiontoIPCapplicationandprospectsinindustrialautomatic control[J].Technological Development of Enterprise,2011(12):80-81.)
[5]王冬清,谭春.欧姆龙CP1H PLC原理及应用[M].北京:电子工业出版社,2009.(Wang Dong-qing,Tan Chun.The Principle and Application of Omron PLC[M].Beijing:Electronic Industry Press,2009.)
[6]黄润,龙伟,张志.欧姆龙PLC无协议通讯在生产呼叫系统中的应用[J].工业控制计算机,2009(2):27-28.(Huang Run,Long Wei,Zhang Zhi.Omron PLC serial communication in call system[J].Industrial Control Computer,2009(2):27-28.)
[7]朱芳芳,顾宏斌,孙瑾.一种改进的Hough变换直线检测算法[J].计算机技术与发展,2009(5):19-22.(Zhu Fang-fang,Gu Hong-bin,Sun Jin.A line detection algorithm based on improved hough transformation[J].Computer Technology and Development,2009(5):19-22.)
[8]杨全银.基于Hough变换的图像形状特征检测[D].济南:山东大学,2009:28-53.(Yang Quan-yin.Shape features detection based on hough transform in images[D].Ji’nan:Shandong University,2009:28-53.)
