大倾角状态下数字天顶仪定位的倾斜误差分析
2018-03-20张西辉周召发刘先一朱文勇杨上
张西辉, 周召发, 刘先一, 朱文勇, 杨上
(火箭军工程大学 兵器发射理论与技术国家重点学科实验室, 陕西 西安 710025)
0 引言
数字天顶仪作为一种高精度的天文定位仪器、相较于国外而言,我国对数字天顶仪的研究起步较晚,不够成熟[1-3]。天顶仪在大倾角状态下(调平精度在100″以上)进行定位时克服了精确调平(调平精度在10″以内)时操作过程复杂,定位耗费时间长的缺点,但在大倾角状态下的定位由于旋转轴和垂直轴之间存在较大的夹角导致定位误差较大。曾志雄等[4]、郭金运等[5]就数字天顶仪的轴系误差对定位精度的影响及其修正方法进行了研究,宋来勇[6]对垂线偏差测量的相关算法理论进行过研究,周召发等[7]、刘先一等[8]、常俊琴等[9]对数字天顶仪的倾角仪及其状态参数进行了相关研究,但是他们在进行误差分析和倾角修正时都是基于数字天顶仪在精确调平状态下进行的,而且没有对倾角修正值的本身误差进行进一步研究。
大倾角状态下仪器旋转轴与垂直轴的夹角较大,最大能达到400″,而精调平时两轴夹角在10″以内。在大倾角状态下定位时数字天顶仪的转位误差、倾角仪的两轴比例系数和夹角误差很小,可以忽略,主要误差是因旋转轴和垂直轴的不一致导致倾角仪读数产生线性漂移和零点误差[10-12]。为了进行高精度的倾角补偿,从数字天顶仪倾角补偿原理出发,建立旋转轴计算模型,经过理论分析,推导计算出旋转轴的倾斜分量,对倾斜误差进行分析以精确求解出倾角补偿值,最后通过实验对误差的消除方法进行验证。
1 倾斜状态介绍
数字天顶仪主要由光学望远镜、电荷耦合器(CCD)成像装置、精密倾角传感器(精密倾角仪)、旋转平台(转台)等部分组成。在利用数字天顶仪进行定位时,通过对CCD获取的恒星影像进行处理,可以得到相应的CCD坐标。运用星表对所得恒星进行匹配,得出恒星的切平面坐标。利用像坐标、切平面坐标和天文坐标的不断迭代计算,可以对测站点进行定位。但是上述方法是在数字天顶仪精确调平的基础上进行的。如图1所示,在倾斜状态下无法达到CCD平面(仪器倾斜面)与测站倾斜面的完全平行,二者之间存在一定的倾斜,天顶仪旋转轴方向并不是测站点的铅垂线方向,因此会产生较大的定位误差,为了保证倾斜状态系的定位精度必须建立模型对旋转轴的倾斜分量加以修正。
2 旋转轴倾斜分量的计算
利用数字天顶仪在倾斜状态下对测站点进行定位的过程中,由于旋转轴与垂直轴存在较大的夹角会造成定位误差较大。为减小倾斜误差的影响,得到测站点垂直轴指向的天文坐标,需要对旋转轴天文坐标进行倾角补偿。其经度、纬度倾角补偿值大小为
(1)
式中:nφ、nλ为数字天顶仪各对称位置相应测站切平面坐标系的旋转轴分量;φ为数字天顶仪旋转轴向的天文纬度。因此由(1)式建立的旋转轴倾斜改正模型可知,数字天顶仪旋转轴倾斜改正计算的关键是精确求取旋转轴分量nφ、nλ. 如图2所示,双轴倾角仪能够高精度地测量数字天顶仪的倾斜角度。
图2中,β为CCD图像坐标系x轴与倾角仪敏感轴X轴之间的夹角,α为CCD图像坐标系x轴的方位角(即x轴与正北方向的夹角)。根据不同坐标系的坐标转换模型,数字天顶仪旋转轴相应切平面坐标系(ξ,η)的倾斜分量nφ、nλ为
(2)
式中:α+β为倾角仪敏感轴X轴的方位角;m、n分别为对称观测位置倾角仪敏感轴X轴、敏感轴Y轴方向的倾斜量。根据倾角仪敏感轴X轴、敏感轴Y轴对称观测位置的读数m1、m2和n1、n2,按(3)式计算
(3)
3 倾斜误差分析
数字天顶仪在大倾角状态下定位过程中,倾角仪的读数会受倾斜量的影响。此处数字天顶仪采用的双轴倾角仪为瑞士徕卡测量系统股份有限公司生产的Nivel 210双轴倾角仪。根据其技术参数可知,Nivel 210双轴倾角仪的测量范围为±410″,分辨率为0.2″. 测量准确度与倾斜角测量区间有关,倾角测量区间越大、准确度越低,测量准确度最低可达±9.7″.
3.1 线性漂移
数字天顶仪在大倾角状态下定位过程中,倾角仪的读数会产生较大的漂移,漂移在短时间内是近似线性的。读数线性漂移跟两方面因素有关:一是跟时间有关,由于在测量时时间间隔较短,所以这部分的影响可以忽略;二是由于仪器位于大倾角状态下,较大的倾斜量会影响仪器性能,所以不能忽略。
针对倾角仪敏感轴读数线性漂移的误差,数字天顶仪在定位测量时采用1-2-2-1两个对称位置上观测的方法,可有效地消除倾角仪敏感轴读数线性漂移的影响,如图3所示。
设数字天顶仪在1-2对称观测位置时,倾角仪敏感轴X轴、敏感轴Y轴的读数分别为m1、m2和n1、n2,在两个敏感轴间读数的比例系数为1,两个敏感轴间的剪切角ε=90°的情况下,设1-2对称观测位置倾角仪敏感轴的读数线性漂移为θX、θY,则在1-2对称观测位置的数字天顶仪旋转轴倾斜量的计算模型为
(4)
由(3)式可得
(5)
所以根据(1)式、(2)式可得,在大倾角状态下定位时数字天顶仪旋转轴方向天文经度、纬度的修正模型为
(6)
式中:α1为数字天顶仪在1拍摄位置时的CCD图像坐标系x轴的方位角。根据(6)式,令
(7)
则(6)式可以进一步表示为
(8)
数字天顶仪经过1-2位置拍摄后再进行2-1位置拍摄观测。设2-1对称观测时倾角仪敏感轴X轴、敏感轴Y轴的读数分别为m′2、m′1和n′2、n′1. 同理可得,对称观测位置倾角仪敏感轴X轴、敏感轴Y轴方向的倾斜量为
(9)
其倾斜轴经度、纬度倾角补偿值大小为
(10)
根据(10)式,令
(11)
所以此时旋转轴方向天文经度、纬度的修正模型(10)式可以表示为
(12)
因为2位置是1位置旋转180°得到的,此时拍摄时CCD图像坐标系x轴的方位角为α2,所以有
(13)
联立(11)式、(13)式可得
(14)
化简可得
(15)
所以在2位置旋转轴方向天文经度、纬度的修正模型为
(16)
联立(8)式和(16)式对倾斜改正求平均值可得
(17)
由(17)式可知,数字天顶仪定位测量时若能按照1-2-2-1的观测顺序观测,并按照(6)式计算1-2观测位置的旋转轴倾斜改正,按照(10)式计算2-1观测位置的旋转轴倾斜改正,则虽然各位置的倾斜改正都含有倾角仪敏感轴读数的线性漂移影响,通过取1-2观测位置和2-1观测位置的倾斜改正平均值就可消除其影响。
3.2 零点偏差
零点偏差是指倾角仪零位的偏移,使得倾角为0°时倾角仪的输出数据不为0. 在精确调平状态下零点偏差对定位精度的影响很小,可以忽略。但是在大倾角状态下(双轴倾角仪输出数据在100″以上时),零点偏差对倾角补偿值的影响较大,不能省略。
根据(4)式,通过旋转两个对称位置求均值的方法可以消除零点偏差。在利用(17)式计算倾斜改正平均值时,不仅消除了读数漂移也同时消除了零点偏差。
4 实验数据分析
实验过程中采用西安航光仪器厂研制的数字天顶仪,视场角大小为3°×3°,CCD采用日本Truesense Imaging公司的KAF-16803全画幅图像传感器,分辨率为4 096×4 096,像素大小9 μm,有效面积36.8 mm×36.8 mm. 采用的双轴倾角仪为瑞士俫卡测量系统股份有限公司的Nivel 210,测量范围为±410″,分辨率为0.2″. 一般倾角值输出数据低于50″时为小倾角,大于50″时为大倾角,为了能够明显地反映在倾斜状态下的倾角值输出数据,一般倾角值输出数据取100″以上。数字天顶仪工作时先顺时针拍摄8幅星图,然后再逆时针拍摄8幅星图,然后将对称位置上的2幅星图作为1个解算单元。已知测站点概略的天文经度为109.1°,天文纬度为34.3°,星表采用的是依巴谷星表,星等可观测暗至14星等,以第1幅图像为例可得出如表1所示的部分识别恒星数据。
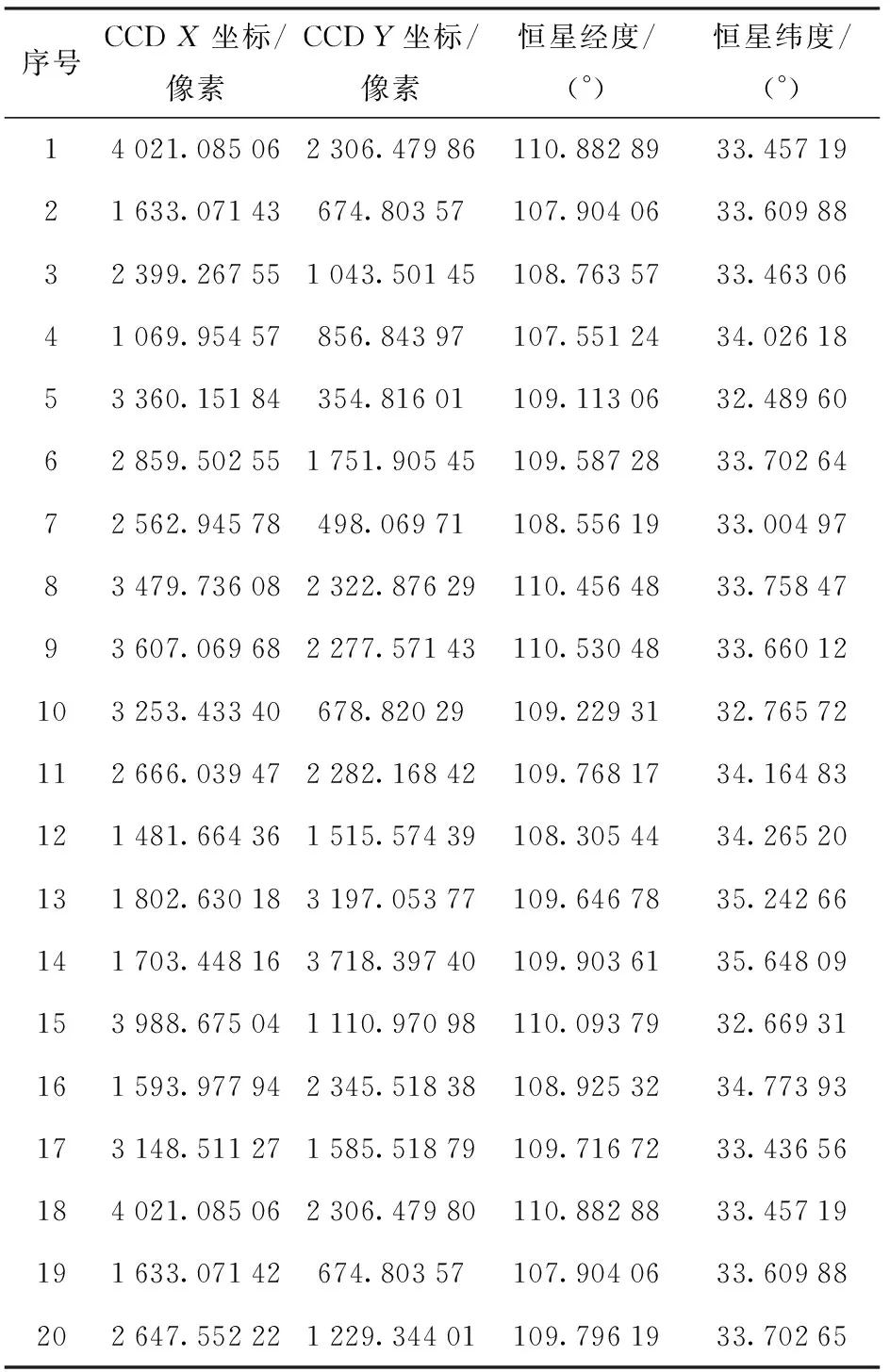
表1 部分识别恒星数据
对实验数据进行测站点位置坐标的解算,分别对数据进行修正倾角补偿值和未经过修正倾角补偿值两种情况下的定位精度比较,比较定位结果如表2所示。
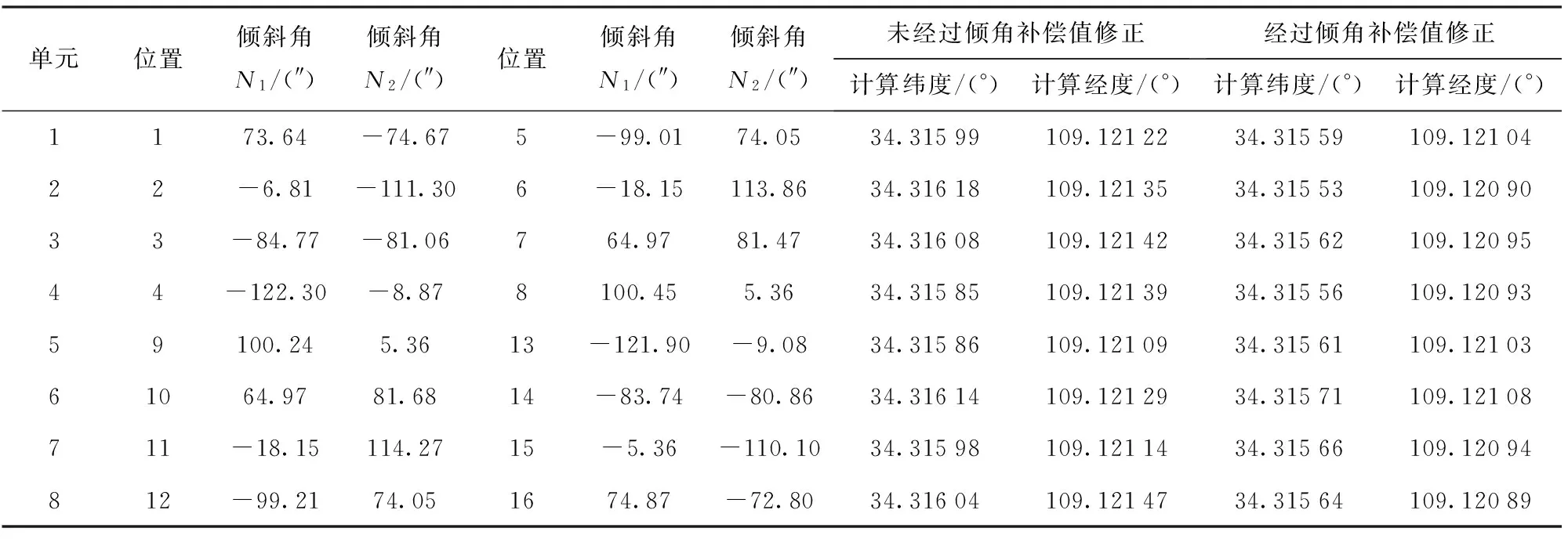
表2 定位结果
为了更明显地表示出进行过倾角补偿值修正和未经过倾角补偿值修正两种情况下的定位结果,画出两种情况下定位结果计算值的分布图,如图4所示。
从图4可以看出,在对倾角补偿值进行过修正之后,数字天顶仪的定位精度有了显著提高,计算其标准差可得,在未进行过倾角修正时经度、纬度的定位精度分别为0.485 6″和0.428 6″,倾角修正值经过修正后的定位精度分别达到了0.266 5″和0.200 9″.
5 结论
大倾角状态下的数字天顶仪定位,能够克服操作过程复杂、定位耗费时间长的缺点,但是大倾角状态会使设备旋转轴和垂直轴存在较大的夹角,最终导致定位误差较大。为提高轴系补偿的准确性,进而提高在大倾角状态下的定位精度,本文从提高倾角补偿值的自身精度角度出发,通过对称位置倾角仪的读数解算倾角补偿值,消除了倾角补偿值中线性漂移和零点偏差的误差。对倾斜误差进行修正后,数字天顶仪的定位精度由以前的0.5″左右提高到0.3″以内。这里只分析了数字天顶仪定位过程中在大倾角状态时的倾斜误差,修正倾角仪读数,提高倾角补偿值的自身精度,在大倾角状态下的定位精度还受星图识别误差、转位误差、倾角仪两轴比例系数和夹角误差等方面的影响,下一步应对这些定位误差进行深入研究以提高定位精度。另外,目前数字天顶仪在定位时都是在静基座状态下进行的,即将仪器置于静止状态下进行定位工作的,后续研究应对动基座状态下的数字天顶仪定位方法进行研究,实现载体在运动状态下就能通过数字天顶仪进行可靠准确定位,这将对数字天顶仪的广泛应用具有十分重大的意义。
)
[1] 田立丽,郭金运,韩延本,等.我国的数字化天顶望远镜样机[J].科学通报,2014,59(12):1094-1099.
TIAN Li-li, GUO Jin-yun,HAN Yan-ben,et al. Digital zenith telescope prototype of China[J]. Chinese Science Bulletin,2014,59(12): 1094-1099. (in Chinese)
[2] Halicioglu K, Deniz R, Özener H. Digital zenith camera system for astro-geodetic applications in Turkey[J]. Journal of Geodesy and Geoinformation, 2013, 1(2):115-120.
[3] 郭敏,张红英.CCD数字摄影在天文定位测量中的运用探讨[J].测绘技术装备,2005, 7(1): 28-29.
GUO Min, ZHANG Hong-ying.The application of CCD in the astronomy orientation[J]. Measurement Technology Equipment, 2005,7(1): 28-29. (in Chinese)
[4] 曾志雄,胡晓东,高立民.天顶摄影仪轴系误差对垂线偏差测量精度的影响及其修正方法[J].光学精密工程,2004,12(1):6-10.
ZENG Zhi-xiong, HU Xiao-dong, GAO Li-min. Effect of digital zenith camera axis error on measurement precision of vertical deflection and its correction [J]. Optics and Precision Engineering, 2004,12(1):6-10.(in Chinese)
[5] 郭金运,宋来勇,常晓涛.数字天顶摄影仪确定垂线偏差及其精度分析[J].武汉大学学报:信息科学版,2011,36(9):1085-1088.
GUO Jin-yun, SONG Lai-yong,CHANG Xiao-tao. Digital zenith camera determine the vertical deflection and its accuracy analysis[J]. Geomatics and Information Science of Wuhan University, 2011, 36(9): 1085-1088.(in Chinese)
[6] 宋来勇.基于CCD/GPS垂线偏差测量理论算法研究[D].青岛:山东科技大学,2012.
SONG Lai-yong. Research on theory and algorithm for measuring of vertical deflections based on CCD and GPS[D]. Qingdao: Shandong University of Science and Technology, 2012. (in Chinese)
[7] 周召发,刘先一,张志利,等.基于数字天顶仪的双轴倾角仪研究[J].光子学报,2015,44(8): 21-26.
ZHOU Zhao-fa, LIU Xian-yi, ZHANG Zhi-li, et al. Research on two-axis tilt sensor based on digital zenith camera[J]. Acta Photonica Sinica, 2015, 44(8): 21-26.(in Chinese)
[8] 刘先一,周召发,张志利,等.数字天顶仪中倾角仪参数的标定[J].光学精密工程,2016,24(9):2325-2331.
LIU Xian-yi, ZHOU Zhao-fa, ZHANG Zhi-li, et al. Calibration of inclinometer parameters in digital zenith camera[J]. Optics and Precision Engineering, 2016, 24(9):2325-2331.(in Chinese)
[9] 常俊琴.数字天顶摄影仪的倾斜仪状态参数计算[J].石化技术,2017,24(4):118-119.
CHANG Jun-qin.Calculation of state parameters of clinometer in digital zenith camera [J]. Petrochemical Industry Technology,2017,24(4):118-119.(in Chinese)
[10] 文香稳,潘明华,朱国力.倾角仪特性研究及其测量误差补偿[J].传感器与微系统,2011,30(3):84-86.
WEN Xiang-wen, PAN Ming-hua, ZHU Guo-li. Research on characteristic of the inclinator and compensation for its measurement error[J]. Transducer and Microsystem Technologies, 2011,30(3):84-86.(in Chinese)
[11] 于娜,刘志远,赵佳龙.倾角传感器的温度补偿研究[J].传感器与微系统,2014,33(10):14-16.
YU Na, LIU Zhi-yuan, ZHAO Jia-long. Research of temperature compensation of inclination sensor[J]. Transducer and Microsystem Technologies, 2014,33(10):14-16.(in Chinese)
[12] 樊锐,史磊.数字倾角仪的非线性补偿及抗干扰技术[J].仪表技术与传感器,2013(5):36-38.
FAN Rui, SHI Lei. Nonlinear error compensation and anti-jamming technique of digital clinometer[J]. Instrument Technique and Sensor, 2013(5):36-38.(in Chinese)
