地质罗盘方位测量的误差分析
2018-03-14高红灿李玉泽徐少华李小刚刘虹利
高红灿 李玉泽 徐少华 李小刚 况 昊 刘虹利
(重庆科技学院石油与天然气工程学院, 重庆 401331)
地质罗盘(以下简称“罗盘”)是野外地质工作必不可少的测量工具之一,主要用于测量岩层的产状和目标物的方位及仰角(或俯角)等[1-3]。但在实际操作中,往往由于罗盘操作不够精确而使得测量结果产生一定的误差,进而影响地质资料的分析解释。罗盘方位测量的误差及其影响因素分析不仅对罗盘的精确操作及测量具有重要的意义,而且也有助于从原理上理解并掌握罗盘的操作规范。
目前,虽然有些电子仪器(如GPS、电子罗盘等)可替代罗盘的部分功能,但受天气状况、电子波信号强度以及仪器所在位置的地形状况等条件的影响较大[4]。特别是在地下采矿巷道中,由于没有电磁波信号而无法使用电子设备进行岩层(或断层)产状的测量以及钻机掘进方位的确定[5-6]。而罗盘以其受环境条件限制少、携带方便、操作简单和价格低廉等优点,在野外地质工作中得到了广泛应用[7-8]。
本次研究以野外罗盘后方交会定点法对目标物方位的测量为例,对测量时由于罗盘底座面(以下简称“底座面”)不水平而产生的误差进行分析。
1 基本原理
罗盘测量目标物方位的基本原理是:在底座面保持水平的情况下,目标物和罗盘瞄准器的尖均落于罗盘上盖反光镜的中线上时,罗盘指针的读数即目标物的正确方位。
由罗盘的结构可知,其底座面与由瞄准器的尖和上盖反光镜中线所确定的平面(以下简称“垂直面”)相垂直。目标物的正确方位就是,当底座面水平时,落于垂直面上的目标物在水平的底座面上的垂直投影点的方位,也就是垂直面与水平底座面垂直交线的方位,这与地形图制作所采用的垂直投影几何法则相适应。
2 误差计算
在罗盘测量目标物方位的实际操作中,往往在调节目标物落于垂直面的过程中,底座面发生倾斜而使目标物方位测量产生误差。底座面不水平时,垂直面与水平面斜交,此时测得目标物的方位是落于垂直面上的目标物沿着垂直面在底座面上的垂直投影点的方位而不是在罗盘所在水平面上的垂直投影点的方位,或者是垂直面与水平面斜交线的方位而不是垂直交线的方位,由此造成目标物方位测量的误差。
用罗盘测量同一目标物方位,若底座面倾角相同,则通过水平转动罗盘,调节目标物落于垂直面上时,罗盘只会呈现出其底座面倾角相同而倾向相反的2种状态,对应于调节前底座面倾角相同而倾向相反的2种初始状态。即无论测量前罗盘的初始指向如何,只要其底座面倾角相同,则目标物最终方位测量的误差就相同,也即罗盘测量目标物方位的误差与罗盘的初始指向无关。所以,本次研究以测量前罗盘初始指向目标物的正确方向为前提,对在底座面不水平情况下进行目标物方位测量所产生的误差进行分析。
底座面不水平可以看作是水平的底座面以罗盘为中心,以水平面上过该中心的任一方向线为旋转轴转动某一角度造成的。为叙述方便,设以罗盘所在位置为起始点,以指向目标物在罗盘所在水平面上的垂直投影点的方向(即目标物的正确方向)为0°方向,沿水平面顺时针方向,方向角依次增大。由于旋转轴没有方向性,所以,仅考虑罗盘以水平面上半圆周内任一方向线为旋转轴即可表示出罗盘在整个圆周上以任一方向线为旋转轴转动某一角度造成底座面不水平的情况。底座面分别在270° — 360°和0° — 90°沿任一方向线转动任意角度,其最终状态可呈一一对应的镜像关系,而且,底座面沿任一方向线顺时针或逆时针转动某一角度,罗盘的最终状态也呈镜像关系。所以,仅考虑底座面在270° — 360°或0° — 90°(本次考虑0° — 90°)以任一方向为旋转轴顺时针或逆时针转动某一角度(本次考虑顺时针方向转动)造成底座面不水平的情况即可穷尽所有底座面不水平的情况。具体可分为3种情况:第1种是以0°方向线为旋转轴顺时针转动;第2种是以90°方向线为旋转轴顺时针转动;第3种是以0° — 90°任一方向线为旋转轴顺时针转动。
需要强调的是,本次设定的造成底座面不水平的旋转轴方向线的度数仅是为了叙述方便,与目标物实际方位和罗盘的读数无关。
(1) 以0°方向线为旋转轴顺时针转动某一角度造成底座面不水平的情况下,目标物方位测量的误差分析。当水平的底座面以0°方向线为旋转轴顺时针转动α角造成底座面不水平(即底座面倾角为α,垂直面倾角φ=90°-α)时(图1a),目标物偏离垂直面。为使目标物重新落于垂直面上,则需逆时针(目标物位于底座面上方时)或顺时针(目标物位于底座面下方时)水平转动罗盘,当目标物落于垂直面上时,罗盘指针的读数即是目标物的测量方位。由于罗盘初始指示目标物的方向正确,所以,罗盘转动的角度实际上就是罗盘指向偏离目标物正确方位的角度,即目标物方位测量的误差角,设为β(图1b)。
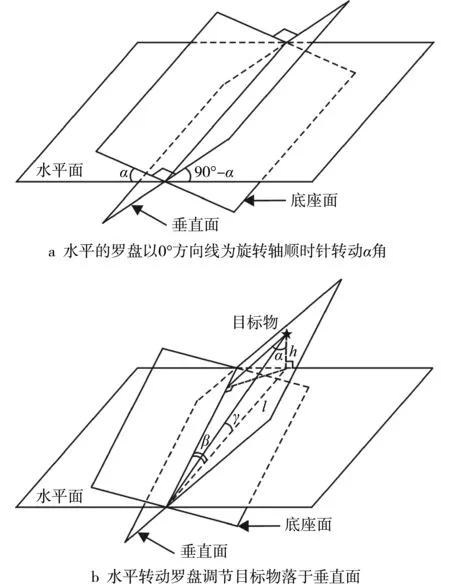
图1 以0°方向线为旋转轴顺时针旋转α造成底座面不水平的情况下测量目标物方位示意图
设目标物到罗盘所在水平面的垂直距离为h,罗盘所在位置与目标物在其水平面上的垂直投影点间的距离为l,从罗盘所在位置观测目标物的仰角(或俯角)为γ(图1b),则tanγ=hl,sinβ=(tanα·h)l=tanα·tanγ,即β=arcsin(tanα·tanγ)。
由该测量过程可知,在垂直面倾角保持不变的情况下,随着罗盘从初始指向的0°方向开始逆时针(或顺时针)旋转,则能够落于垂直面上的目标物的高度可以越来越高(或低),即其仰角(或俯角)可以越来越大。当底座面逆时针或顺时针水平转动的角度增大到90°时,垂直面与罗盘所在水平面的交线和0°方向线相垂直,落于垂直面上的目标物的仰角(或俯角)增大到最大,等于垂直面的倾角。所以,上述目标物方位测量的误差公式的适用条件为γ<(90°-α)。
(2) 以90°方向线为旋转轴转动某一角度造成底座面不水平的情况下,目标物方位测量的误差分析。当底座面水平时,垂直面与设定的90°方向线垂直,所以,当底座面以90°方向线为旋转轴转动时,垂直面始终不变且与水平面垂直,即罗盘始终指向目标物的正确方向。即底座面以90°方向线为旋转轴转动任意角度,对目标物方位的测量均不产生任何误差。
(3) 以0° — 90°任一方向线为旋转轴顺时针转动某一角度造成底座面不水平的情况下,对目标物方位测量的误差分析。以罗盘中心为原点O,以 0° — 90°的任一方向线(设该旋转轴与0°方向线之间的夹角为θ)为Y轴,以水平面为XOY平面建立如图2a所示的空间直角坐标系,则水平面XOY的法向量m=(0, 0, 1),垂直面的法向量n=(cosθ, sinθ, 0)[9]。
当水平的底座面绕Y轴顺时针转动α′时,底座面与水平面的夹角亦为α′;同时,垂直面也同样绕Y轴顺时针转动α′,其法向量由n变为n′=(-cosθ·cosα′, -sinθ, cosθ·sinα′)(图2b)。由于旋转轴(即Y轴)不在垂直面上,所以,垂直面与水平面的夹角φ′≠90°-α′,且垂直面与XOY平面的交线随旋转轴和转动角度的变化而与0°方向线呈不同的夹角ω(图2b)。根据二面角计算公式cosφ′=(n′·m)(|n′||m|),得cosφ′=(cosθ·sinα′)(cos2θ·cos2α′+sin2θ+cos2θ·sin2α′)=cosθ·sinα′,即φ′=arccos(cosθ·sinα′)。
由罗盘测量目标物方位的基本原理可知,水平的底座面以0° — 90°与0°方向夹角为θ的方向线为旋转轴顺时针转动α′造成底座面不水平(即底座面的倾角为α′,而垂直面倾角φ′≠90°-α′)时罗盘所处的状态,与先使水平的底座面以0°方向线为旋转轴顺时针转动90°-φ′(即底座面倾角为 90°-φ′,而垂直面倾角为φ′),再使罗盘逆时针水平转动ω后罗盘所处的状态完全相同(图2b)。在该状态基础上,进一步使罗盘逆时针或顺时针水平转动某一角度,使目标物重新落于垂直面上时罗盘指针的读数即为目标物的测量方位,其测量误差等于以0°方向线为旋转轴转动的罗盘第1次逆时针水平转动的角度ω和第2次水平转动的角度(逆时针转动计为正值,顺时针转动计为负值)之和。即罗盘以 0° — 90°任一方向线为旋转轴顺时针转动某一角度造成底座面不水平的情况可转换为罗盘以0°方向线为旋转轴顺时针转动某一角度造成底座面不水平的情况,该转换的前提是这2种情况下垂直面的倾角相等。

图2 以0° — 90°任一方向线为旋转轴顺时针转动α′造成底座面不水平的示意图
所以,水平的底座面以0° — 90°与0°方向夹角为θ的方向线(图2a)为旋转轴顺时针转动α′时,底座面倾角为α′,垂直面倾角φ′为arccos(cosθ·sinα′);而水平的底座面以0°方向线为旋转轴顺时针转动90°-φ′时,底座面倾角α为90°-φ′,垂直面倾角为φ′,即这2种情况下垂直面的倾角都为φ′。若目标物仰角(或俯角)为γ,则根据误差公式β=arcsin(tanα·tanγ)可计算出以0° — 90°与0°方向夹角为θ的方向线(图2a)为旋转轴顺时针转动α′造成底座面不水平的情况下,目标物方位测量的误差β′为:
β′=arcsin(tanα·tanγ)
=arcsin(tan(90°-φ′)·tanγ)
=arcsin(cotφ′·tanγ)
=arcsin(cot(arccos(cosθ·sinα′))·
tanγ),其中γ<φ′。
综上所述,只要垂直面倾角相同,则同一目标物方位测量的误差就相同。即决定罗盘测量目标物方位误差的因素有2个 —— 垂直面倾角和目标物仰角(或俯角),而底座面的倾角并不是决定目标物方位测量误差的因素,但其与垂直面的倾角存在一定的函数关系。在以0°方向线为旋转轴顺时针转动α造成底座面不水平的情况下,其目标物方位测量的误差公式β=arcsin(tanα·tanγ) (其中γ<(90°-α))中之所以出现的是底座面的倾角α,而不是垂直面的倾角φ,是因为底座面倾角与垂直面的倾角直观可见,且与垂直面倾角间存在简单的互余关系,两者可看作是同一个变量,即该测量方式下目标物方位的误差公式也可写成:
β= arcsin(cot(90°-α)·tanγ)
γ<(90°-α)
(1)
或β=arcsin(cotφ·tanγ),γ<φ
(2)
3 误差分析
实际上,若底座面倾角超过20°时,罗盘指针将由于无法自由转动而不能进行测量,因此,本次探讨的目标物方位误差分析,仅讨论其底座面倾角小于20°的情况。
由罗盘测量目标物方位的误差公式式(1)和式(2)可知:目标物方位的误差与γ成正比,而与垂直面的倾角φ成反比或与底座面的倾角α成正比;且随着α或和γ的增大,目标物方位测量误差β增大的速率也越来越大(图3)。
当水平的底座面以0° — 90°与0°方向夹角为θ的方向线为旋转轴顺时针转动α′,与水平的底座面以0°方向线为旋转轴顺时针转动的α相等时,前一种情况下的垂直面的倾角φ′比后一种情况下的垂直面的倾角φ大,并随着θ的增大,φ′增大的速率也越来越大(图4),当θ=90°时,φ′增大到90°。所以,水平的底座面在以0° — 90°任一方向线为旋转轴顺时针转动的角度和以0°方向线为旋转轴顺时针转动的角度相同的情况下(即底座面的倾角相等),测量同一目标物的方位时,前者产生的误差比后者要小,并随着θ的增大,其测量误差逐渐减小,且减小的速率越来越大,当θ增大到90°时,测量误差减小到0(即无论罗盘如何转动均不会产生任何误差)。
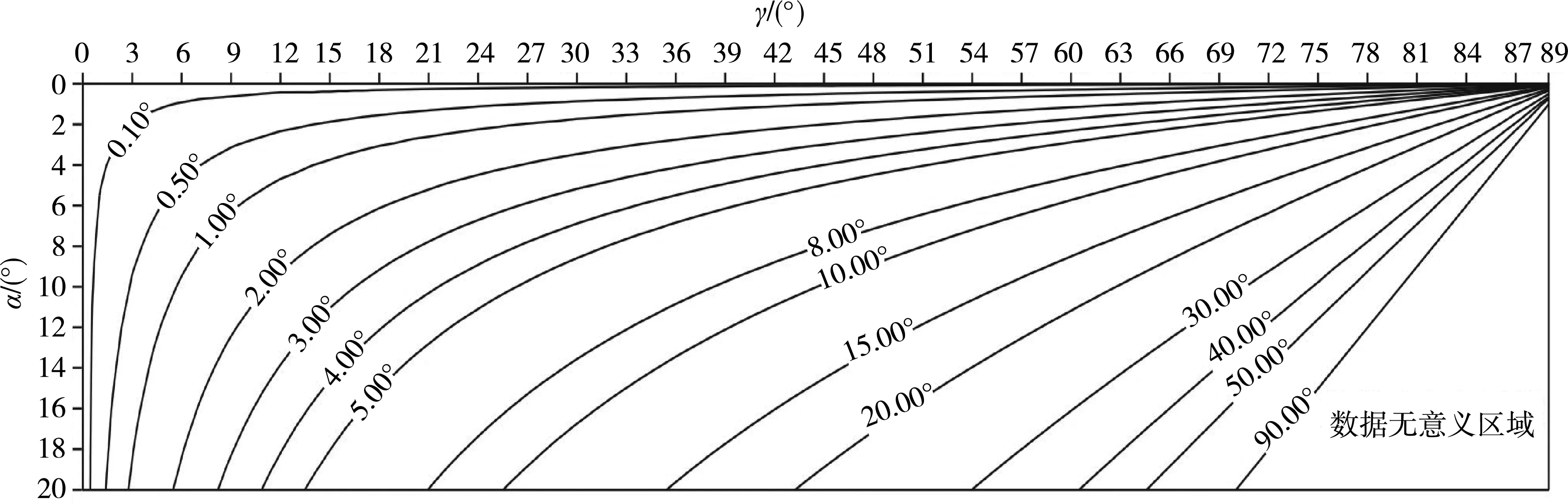
图3 以0°方向线为旋转轴顺时针转动造成底座面不水平时目标物方位测量的误差等值线
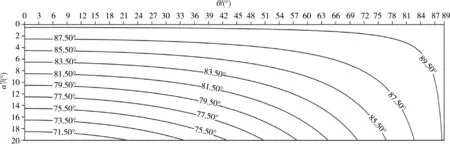
图4 以0° — 90°任一方向线为旋转轴顺时针转动造成底座面不水平时垂直面的倾角φ′等值线
4 结 语
(1) 决定罗盘测量目标物方位误差的因素有2个 —— 垂直面的倾角和目标物的仰角(或俯角),而底座面的倾角不是决定目标物方位测量误差的因素,但其与垂直面的倾角之间存在一定的函数关系。
(2) 目标物方位测量的误差与目标物的仰角(或俯角)成正比,与垂直面的倾角成反比(或与底座面的倾角成正比),且随着目标物仰角(或俯角)的增大或(和)垂直面倾角的减小(或底座面倾角的增大),目标物方位测量的误差增大的速率越来越大。
(3) 水平的底座面在以目标物的不正确方位线为旋转轴和以目标物的正确方位线为旋转轴顺时针转动相同角度(即底座面倾角相等)造成底座面不水平的情况下测量同一目标物的方位时,前一种情况下的测量误差要比后一种情况小,并随着转动轴与目标物的正确方位线之间夹角的增大,其测量误差逐渐减小且减小的速率越来越大。当转动轴与目标物正确方位线之间的夹角增大到90°时,其测量误差减小到0(即无论罗盘如何转动均不会产生任何误差)。
[1] 高红灿,王茂成,李小刚.野外地质教学中地质时空观的培养[J].中国地质教育,2015,24(2):72-74.
[2] 曹秀华,汪新文,林建平.对北戴河地质认识实习野外教学的思考[J].中国地质教育,2015,24(4):42-45.
[3] 文彦君.地质罗盘综合实验与学生能力培养[J].长春理工大学学报(高教版),2010,5(4):154-155.
[4] 陈承良.GPS光电测距仪及罗盘仪在非法征占用林地测量中的应用[J].园艺与种苗,2015(5):33-35.
[5] 万斌,赵全富,吴祥,等.地质罗盘在测量断层产状上的误差分析[J].煤矿现代化,2004(6):55-56.
[6] 廉法宪.用地质罗盘在有磁场干扰的巷道中直接测量地质产状的方法[J].矿业安全与环保,2001,28(3):55-56.
[7] 李永海,魏双宝,丁文利,等.磁罗盘定向清线方法在丛林地震勘探中的应用[J].物探装备,2012,22(4):259-262.
[8] 刘小春,付奉甜,赵春丽,等.使用罗盘和GPS测量勘探线剖面的偏离校正[J].云南地质,2014,33(3):437-440.
[9] 张海燕,华秀英,巩英海.高等代数与解析几何[M].北京:科学出版社,2016:11-45.
