火炮自动装填机械手的自适应动态面滑模控制
2018-03-01董绍阳陈龙淼
董绍阳,陈龙淼,张 彤
(1.南京理工大学, 江苏 南京 210094; 2.北方华安工业集团, 黑龙江 齐齐哈尔 161006)
弹药自动装填系统是现代乃至未来火炮发展的重要方向,而高性能的自动装填系统对火炮自动装填机械手供输弹的位置精度、输弹速度都提出了严格的要求。自动装填机械手的主要任务是从自动化弹仓中抓取弹丸并迅速的进行回转动作定位于输弹位置,推弹至弹药协调器中,最后回到初始位置。
随着自动装填机械手进行回转运动,其负载、转动惯量等参数势必会发生显著变化,而且系统存在着摩擦力矩、齿隙、未建模动态等非线性因素。因此,火炮自动装填机械手是一类参数不确定、非线性因素影响显著的控制对象,而传统的PID控制在非线性控制方面已经捉襟见肘。文献[1]针对火箭炮位置伺服系统俯仰控制,采取了一种自适应反演滑模控制的方法,消除了系统静差,对系统参数摄动和外界干扰具有较强的鲁棒性,但反演法本身会引起项数膨胀的问题。文献[2]采用的动态面滑模控制方法,有效的处理了大型液压起竖非线性系统的不确定性的影响,仿真结果表明动态面滑模控制具有良好的抗干扰能力和跟踪性能。
本文提出了一种自适应动态面滑模控制的方法。针对回转过程中带弹与不带弹、位置的变化以及类似摩擦等未建模动态因素的影响,采用了自适应算法,提高了系统位置误差的跟踪性能;引入动态面滑模控制,利用一阶积分滤波器计算虚拟控制的导数,消除微分项的膨胀,简化控制器的设计;最后利用滑模控制,采用饱和控制律代替切换控制律,有效地削弱了系统的抖振。通过与传统PID控制位置误差曲线的对比,仿真结果表明该控制方法具有较高的控制精度和较强的鲁棒性,足以满足工程上对供输弹定位精度的要求。
1 问题描述及数学建模
火炮自动装填机械手在控制方向主要由两大部分构成:回转控制部分和平动控制部分。具体三维建模参考图1。回转控制部分的位置控制精度决定了供输弹过程能否顺利的进行,而回转速度的控制决定了供输弹过程时序是否合乎工程要求以及运动是否平稳。因此火炮自动装填机械手回转部分的位置跟踪控制是本文研究的主要任务。

图1 自动装填机械手三维图
回转部分位置伺服系统的执行元件为永磁同步电机(PMSM),在d-q两相同步旋转坐标系下,假设:
1) 忽略饱和效应;
2) 气隙磁场均匀分布,感应反电动势呈正弦波状;
3) 磁滞及涡流损耗不计;
4) 励磁电流无动态响应;
5) 转子上无励磁绕组。
此时,定子电流励磁分量id=0,电磁转矩方程为
(1)
式中:Te为电机的电磁转矩;Pn为电机磁极对数;ψf为转子磁链;iq为q轴电流;KT=1.5Pn·ψf
为电机转矩常数。PMSM伺服系统动力学方程为
(2)
式中:J为电机的转动惯量;TL为负载转矩;B为电机的黏性摩擦因数;θ为转子角位移。
自动装填机械手的动力学模型为
(3)
JL为系统等效到电机输出轴的转动惯量;BL为系统等效到电机输出轴的粘性阻尼系数;Td为等效扰动,包括啮合冲击、摩擦力矩以及其他未建模动态非线性因素等。结合式(2),得到
(4)
令控制量u=iq,则
(5)
当机械手在带弹与不带弹两种工况下,其系统参数也会相应的变化,则


(6)

(7)
式中:Ak=-Bn/Jn,Bk=1/Jn,Fd=-Tl/Jn,Fd称为总不确定性。
本文所要达到的控制目标为:设计有界的控制输入u,使得电机转子角位移θ能够跟踪期望轨迹θd,且跟踪误差e要尽量小,整个控制过程平稳无剧烈冲击。
2 自适应动态面滑模控制
2.1 动态面滑模控制器设计
第一步:
采用由Lyapunov函数推导控制率的方法,则由状态空间方程(7),定义位置误差为
e1=x1-x1d
(8)

定义Lyapunov函数为
(9)
则
(10)
之后根据式(10)定义
e2=x2-z2
(11)
则
(12)

(13)
第二步:
采用滑模变结构控制,定义滑动面为s=e2。
由第一步可知系统存在三种误差:位置跟踪误差e1、虚拟控制误差e2和滤波误差y2,则定义Lyapunov函数为
(14)
则
(15)
经计算可得

(16)
令

(17)

(18)
由(18)可设计控制率为
(19)
其中,c2>0。
2.2 自适应控制器设计
介于影响总不确定性Fd的因素很多,其上界很难确定,因此采用自适应方法实现对Fd的估计。
对于火炮自动装填机械手模型,其整个运动过程需平稳无剧烈冲击,则建立如下假设:假设参数不确定部分及外加干扰项变化缓慢,有
(20)
继续根据2.1节对控制率的设计,定义Lyapunov函数
(21)


(22)
结合滑模变结构控制定义滑动面为s=e2,并且设计自适应律为
(23)
则
(24)
因此,设计自适应动态面滑模控制器公式为
(25)
2.3 稳定性分析
取V3(0)≤p,p>0;D有界,记作M,则|D|≤|M|。

(26)
取参数
则

(27)

(28)
又因为,V3(0)≤p,则V(t)≤p。
因此,整个火炮自动装填机械手闭环系统是稳定的。
3 仿真分析与验证
根据以上数学模型建立自适应动态面滑模控制器,同时建立PID控制器,使用Matlab/Simulink建立系统的仿真图,系统的主要参数如表1所示。

表1 主要仿真参数
自动装填机械手实际期望轨迹为点到点的运动轨迹,分为匀加速-匀速-匀减速3个运动过程。如图2所示,转子最大角位移为180 rad,最大速度180 rad/s。

图2 期望轨迹
仿真结果如图3~图8所示。图3为系统的控制输入,可以看出,在系统加速度转换阶段,控制输入有稍许的波动,但很快趋于稳定,由于算法以饱和函数代替了传统滑模控制中的不连续切换控制项,因而控制输入曲线较平滑,很好的削弱了抖振的现象。
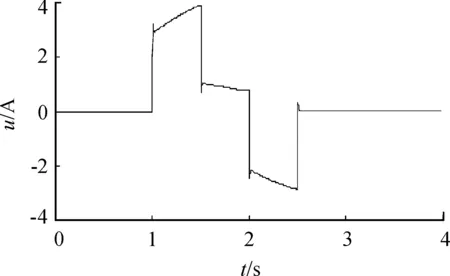
图3 控制输入
图4为自动装填机械手位置跟踪误差,可以看出,在控制阶段初期,外部扰动还未加载时,系统位置跟踪误差为0,在1 s后,外部扰动加载,整个运动过程系统位置跟踪误差处于±2×10-3rad之间,结合机械手的减速比和回转半径,其最终回转定位控制精度在0.017 mm之内,足以满足机械系统正常供输弹的要求。

图4 位置跟踪误差
图5为自适应动态面滑模控制与PID控制位置跟踪误差对比曲线,PID位置控制误差在±0.15 rad之间,而对比图4很明显看出PID误差值远大于自适应动态面滑模控制的误差值。

图5 位置误差对比曲线
图6为Fd的自适应变化曲线,由曲线可以看出,在机械手速度增大的过程中,机械手位置发生改变,总不确定性Fd的值也随之增大,当速度达到最大时,其系统总不确定干扰的值也最大,与实际情况相吻合。

图6 Fd的自适应变化曲线
结合以上曲线,可以很好的看出控制器能够快速的对外界不确定扰动以及参数的变化做出相应的调整。
为对算法进行进一步验证,将等效扰动的参考值进行更改,经扩大4倍变为-20sin(4.19t),则系统位置跟踪误差以及Fd自适应变化曲线如图7所示。
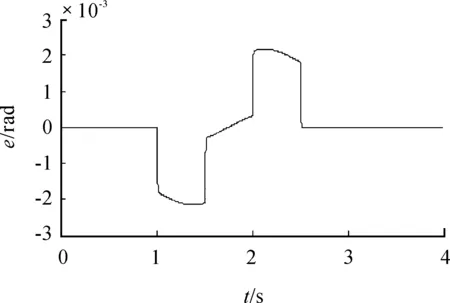
图7 位置跟踪误差
结合图4以及图7,在预设的总不确定性变化比较大的情况下,系统仍然能保持位置跟踪误差在±3×10-3rad之间,这都表明系统具有较强的鲁棒性。从图8可以看出,自适应动态面滑模控制可以很好的随着总不确定性值的变化而改变参数的估计值。
4 结论
本文在火炮自动装填方面为机械手的精确位置跟踪控制提出一种自适应动态面滑模控制算法,能够对不确定参数进行自适应估计,减少了系统的抖振,实现了较高精度的位置控制和跟踪性能,经过理论证明系统具有很好的稳定性,通过仿真对比其具有较强的鲁棒性。
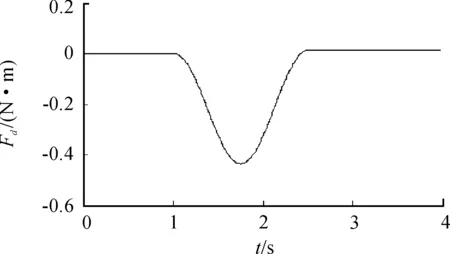
图8 Fd的自适应变化曲线
[1] 郭亚军,王晓锋,马大为,等.自适应模糊滑模控制在火箭炮耦合系统中的应用[J].南京理工大学学报(自然科学版),2012,36(4):618-623.
[2] 李良,谢建,黄建招.动态面滑模控制在大型液压起竖系统中的应用研究[J].兵工学报,2014,35(2):235-240.
[3] 陈龙淼,肖宇强,邹权.基于扰动观测器的传弹机械手自适应滑模控制[J].南京理工大学学报(自然科学版),2015,39(5):531-537.
[4] 刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.
[5] WAI R J,SU K H.Adaptive enhanced fuzzy sliding-mode control for electrical servo drive[J].IEEE Transactions on Industrial Electronics,2006,53(2):569-580.
[6] 邹权,钱林方,徐亚栋,等.链式回转弹仓的自适应鲁棒控制[J].兵工学报,2014,35(11):1922-1927.
[7] XU H J,MIRMIRANI M D,IOANNOU P A.Adaptive sliding mode control design for a hypersonic flight vehicle[J].Journal of Guidance Control & Dynamics,2004,27(5):829-838.
[8] 张天平,高志远.具有动态不确定性的自适应动态面控制[J].控制与决策,2013,28(10):1541-1546.
[9] LI Y,XU Q.Adaptive Sliding Mode Control With Perturbation Estimation and PID Sliding Surface for Motion Tracking of a Piezo-Driven Micromanipulator[J].IEEE Transactions on Control Systems Technology,2010,18(4):798-810.
[10] UTKIN V I,POZNYAK A S.Adaptive Sliding Mode Control[J].Lecture Notes in Control & Information Sciences,2013,440.
