活用分散处理法控制高精度同步时刻
2018-02-26李依霖冯旭
李依霖 冯旭
摘要 隨着网络的高速化和虚拟服务器的发展,代表云计算的复数节点进行协调工作的分散处理型服务器和虚拟网络正在普及。因此,出现了以微妙和毫秒为精度在节点间同步时间的IEEE1588、PTPv2。本研究提出了利用高精度同步节点分散处理控制的方法。本方法根据预先时间执行处理动作脚本和根据时间遍历系统内节点的数据处理,在不传输处理情况的数据包时能确认其他节点的状况,并有效地计算资源分配额。通过本方法掌握通信延迟和节点的性能和特征,为修正动态动作脚本建立处理时间更正的模型。我们为了确认提出方法的有效性开发出实验用的系统原型模型,确认了处理时间变更时的正确性和有效性。
【关键词】云计算 分散处理法 高精度同步节点 修正模型
1 前言
随着网络的高速化和虚拟服务器的发展,代表云计算的复数节点进行协调工作的分散处理型服务器和虚拟网络正在普及。通过服务器和路由等节点多台连接,构成具有指定性能的分散处理型服务。另外,软件定义网络式的控制路由群,在动态网络下构成网络虚拟化。在提供云服务的数据中心导入用户化功能的LSI按钮,能构成高速网络。云计算式的分散处理,各节点进行独立的处理,必须掌握节点间的处理状况和处理内容。从而交换控制命令经由网络。随着网络的高速发展,出现了以微秒和毫秒为精度同步精度节点的IEEE1588和PTPv2。主要用于以太网,电力网拓扑同步标准信息。PTPv2用于硬件以毫秒为单位,长时间稳定同步时刻。节点间的同步方法有NTP和GPS方法。前者导入软件,IP网络上时刻同步精度为微秒,后者以纤秒为时刻同步要限制成本和条件。
对分散节点的控制用高精度同步时刻的处理方法。在分散节点上对进行任务处理脚本,共享全部节点,节点按照时间信息和动作脚本进行处理,将适应这种方法的节点群和管理节点进行分散处理同步时刻IEEE1588、PTPv2协议。构成系统的节点群连接IP网络和时刻同步网络。首先,进行分散处理控制,节点间的通信产生通信延迟,处理执行开始到终了产生的延迟。另外,通过这个结果开发出时间处理修正方法,用原型系统进行评价,验证了此方法可行。
2 系统概要
本系统处理节点通过lP网络连接,以各种固定的处理功能作为前提。时间型分散处理控制方法是在IP网络上实现分散处理各节点的时间同步IEEE1588TPv2的高精度。进行处理的节点更新。根据时间执行如何处理动作脚本。在特定的时间由指定节点发出数据记载其处理功能,传输结果给下一个节点,并在时间内顺序处理。各节点按动作脚本进行同步时间处理。某节点进行的处理结果重复传输给下一个节点,遍历系统内的节点进行数据处理。
本系统的5个特点:
(1)根据时间和共同动作脚本进行处理。
(2)事先掌握其他节点在任意时间上进行的处理,即使不发送任务处理中节点间处理情况确认的数据包,也能确认其他节点的情况。
(3)节点无论之后发生怎样的情况变化,都能事先判断并进行有效的资源计算分配。
(4)考虑到处理中的延迟,针对这些影响进行动作脚本的动态修正。
(5)任意时刻内进行分散处理,优化系统大范围的集成电路分配功能分散动作控制。
3 研究问题
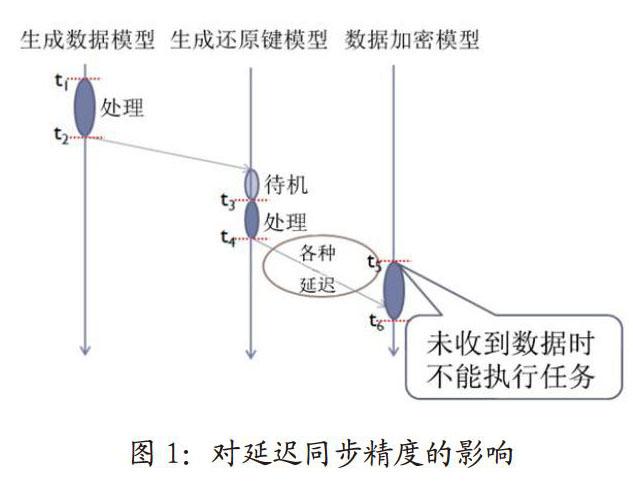
为了实现时间分散处理的控制,必须执行多个节点间通过动作脚本目标时间的任务。考虑到各节点和节点间的通信时产生的延迟问题作为研究问题。例如考虑适用分配的电路动作控制的情况,如图1所示,进行加密的对象生成数据的模块,加密中生成复原键的模块,加密数据,数据加密模块三部分的模块群。动作脚本如下:
(1)数据生成模块从时间T1到时间T2的动作传送处理结果给还原键生成模块。
(2)还原键生成模块时间T3到T4传输数据给数据加密模块。
(3)数据加密模块在时间T5处开始动作,在T6处进行加密处理并输出结果。
还原键生成模块的处理结果根据延迟到时间T5数据加密模块接收不到信息时,数据加密模块没有必须传输的数据时,不执行动作,不根据动作脚本进行处理。当只处理一个系统任务的情况下,最后的数据加密模块必须在数据到达为止,待机状态下进行动作。同时执行多个任务时,当任务执行时进入了另外的任务,就存在不能分配计算资源的问题。为了解决这个问题,进行各节点的延迟和节点间的通信延迟的动态动作脚本修正。因此,对系统内产生延迟的原因分类,进行动作脚本修正模块化。
4 研究方法
4.1 延迟的种类和原因
实现时间型分散处理控制的情况下发生延迟的原因分为两大部分,A、节点的性能和特性原因产生延迟B、网络原因产生延迟。A考虑到时间同步精度和时间取得处理执行中时间和插队处理的时机对各节点的定时分解的影响。具体如下:
(1)因时间分散处理控制而取得处理。
(2)根据NIC等的设备交换生成的系统插队处理延迟。
(3)和其他节点的时间同步差进行处理。
(4)因系统负载处理延迟。
B是节点间的通信性能和hop数不同,因路由拥堵,网络拓扑和特征原因引起。具体如下:
(5)从节点到数据包传送延迟和节点间的传输延迟造成的通信延迟。
(6)路由再发送信号传输处理间的延迟。
4.2 网络原因产生的延迟测量方法
本系统在各节点间进行通信延迟测量。发信节点发出数据包的时刻做时间戳。为了让节点间时间同步,收信节点接收数据包的时间和数据包上时间戳的时间差进行通信延迟测量。测定时刻为系统启动时,数据包发生通信时,在一定时间内节点间不进行通信。从测定的延迟时间开始,利用动作脚本修正计算平均延迟时间和标准偏差。
5 原型模型
为了提出方法的有效性,开发原型模型系统进行评价。原型系统用了三台节点和一台主节点,利用PTPv2保证时刻同步精度。用专门按钮时刻同步网络,节点间的数据通信用两种网络构成。执行任务的节点用于通用计算机,连接时刻同步网络的界面,使用连接PCI Express装载PTPv2功能的NIC(即PTPNIC)。为了在动作脚本中到指定的时刻进行待机用Usleep系统短时间待机。原型系统根据时刻和脚本进行节点间通信的软件安装,用C语言开发。
6 驗证
对时间处理产生的延迟进行测量,根据提出的模型进行动作脚本的修正,进行修正模型的验证。
6.1 节点的性能和特征产生延迟的测量
6.1.1 从PTPNIC的时刻得到执行时间
构成本系统的各节点,处理任务时的动作为判断基准取现在时刻。测试用一台节点从PTPNIC取得时刻。测试为从PTPNIC取两次连续的时刻,测试取得一次时刻处理的时间方差。测试执行1000次,测出平均执行时间和标准偏差。结果是平均执行时间为4微秒,标准偏差为O.1。
6.1.2 从恢复待机状态的时间
通过测量Usleep系统短待机可能的最短时间,测出进入待机状态到发生任务的延迟。测量中,取执行Usleep系统短时间段的前后时刻,计算两个方差。用这个方差减在6.1.1中求得时间的平均值。试运行1000次的结果,平均执行时间55.8微秒,标准差9.8。从这个结果看出,本原型系统Usleep系统短期待机能的比最短时间更短的情况,如20微秒的待机处理脚本的情况下,产生55.8-20微秒的延迟,这种情况下,下一个动作可以提前20微秒执行,否则就需要滞后35 8微秒。
6.2 测量网络原因产生的延迟
进行UDP通信的节点间传输一个hop数时,进行通信延迟的测量。数据包大小为64,128,256,512,1024bate,各300次,一共试运行1500次。结果是,64bate时平均传输时间143.8毫秒,标准差为4.6。1024bate时平均传输时间为168.1微秒,标准差为4.3。数据包大小变化时标准差基本不变,但平均传输时间发生变化。
6.3 根据测量结果修正动作脚本
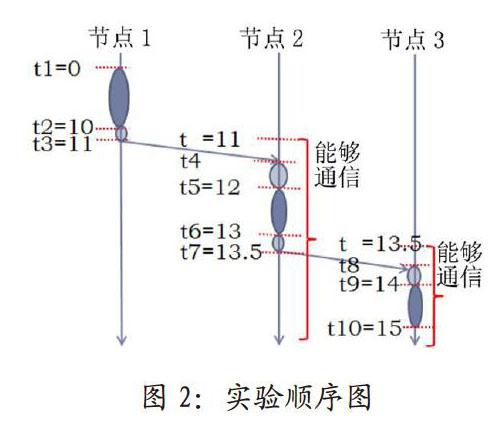
数据通信用的网络延迟时间产生变化时,为确认动作脚本的修正模型正常工作的三台节点,用节点A、节点B、节点C验证进行时间分散处理的动作结果。三个节点举出的数据生成/恢复键生成/数据加密模块,假设用三个模块构成的系统,节点A、节点B、节点C的顺序进行传输数据。当节点A和节点B间的网络延迟时间从500微秒到1900微秒,每200微秒工作一次时,验证进行了动态的修正。初期的动作脚本顺序图如图2所示。
最终节点A和节点B间的网络延迟时间700微秒,1300微秒,1900微秒在时刻t2,t3,t4,t5间显示。从这个结果,节点A和节点B间的延迟时间从500微秒到900微秒时,就在脚本通过发信时刻t3=llms执行,节点B在t=11ms前,不能执行传输。两节点的延迟时间超过1000微秒时,节点B的动作开始时间为到达t5=12ms而换成t3,考虑到延迟时间需要提前发信。从这个结果看,确认了处理时刻修正方法缓和了节点间产生的延迟影响。
7 总结
本论文用于控制高精度同步分散节点的时间,首先根据时间进行处理的动作脚本和随着现在时间和数据遍历系统中节点的处理,提出时间分散处理控制。首先,在节点间产生通信延迟,从开始处理到结束产生延迟检验本方法的有效性。结果证明了修正处理时间的方法,在原型系统下可以实现。其结果在数据通信用网络中节点间的通信关系在延迟时间发生变化的情况下,时间修正模型能正常工作。
参考文献
[1] Thomas Erl,ZaighamMahmood.云计算:概念、技术与架构[M].北京:机械工业出版社,2014.
[2] 1EEEStd1588-2008, 1EEEStandardfora Precision CIockSynchronizationProtocol for Networked Measu-rementand ControlSystem [S]. 2008.
[3]王建珍,计算机网络时间同步技术应用研究[J].山西电子技术,2005 (04): 7-8.
[4]求是科技.FPGA数字电子系统设计与开发实例导航[M].北京:邮电出版社,2005.
[5]宫田宽士,服务器端网络架构[M].北京:人民邮电出版社,2015.
[6]张亚元,基于GPS和高精度实时时钟的时间同步方法研究[D].天津大学,2014.
[7]邓伟.基于GPS时钟同步系统的实现与应用[D].北京邮电大学,2015.
[8]许雄,实时以太网下多轴运动控制的同步问题研究[D].上海交通大学,2013.
