车载激光雷达的主要技术分支及发展趋势
2018-02-20余莹洁
余莹洁
国家知识产权局专利局
1 车载激光雷达概述
激光雷达测量技术(Light Detection And Ranging,LiDAR)由微波雷达发展而来,最初源自于1970年美国航天局(NASA)的研发[1]。传统的雷达以微波和毫米波段的电磁波作为载波,而激光雷达以激光作为载波,他们的工作原理基本类似(图1),都是先向被测目标发射搭载有信息的载波探测信号,然后测量反射信号的到达时间、波束所指方向、频率变化等参数来确定目标的距离方向和速度[2]。相较于微波,激光的波长要短几个数量级,波束更窄,因此与微波雷达相比,激光雷达的体积更小、重量更轻,具有更高的角分辨率和更好的抗干扰性。
伴随着 GPS 定位技术发展至厘米级的定位精度以及惯性测量单元(IMU)精度的显著提高,激光雷达测量技术开始走向商业化的发展道路,最早应用于空(机)载激光雷达系统,在测绘、国防等领域得到了广泛的应用[1]。
近年来,从最初为满足军事应用需求而推动的地面无人驾驶车辆,到世界几大主要车企先后投入民用自动驾驶汽车的研发,自动驾驶汽车的发展趋势正在不断被印证。从需求角度来看,研发自动驾驶汽车是为了满足人们对驾驶技术的更高要求和对智能交通的迫切需求,从技术角度来看,研发自动驾驶汽车是相关技术领域取得突破后的顺势,环境感知技术、新能源技术、人工智能等领域的发展为传统汽车行业带来了新的发展方向。自动驾驶汽车的环境感知就像是汽车的视听觉,能够帮助汽车快速、精确地获取行驶环境信息,是车辆实现避障、定位、路径规划等高级智能行为的前提条件和基础[3]。根据国际汽车工程师学会(SAE, Society of American Engineers)制定的分级标准,自动驾驶分为Level 0到Level 5 共六个级别,分别对应全手动驾驶(Level 0)、辅助驾驶(Level 1)、部分自动驾驶(Level 2)、特定条件下自动驾驶(Level 3)、高度自动驾驶(Level 4)和完全自动驾驶(Level 5)[4]。实现自动驾驶汽车的环境感知离不开三种类型的传感器:摄像机、雷达和激光雷达,其中摄像机和雷达传感器在Level 1和Level 2级别的自动驾驶车辆上已实现配备,目前行业内的普遍观点认可,要实现Level 3级别的无人驾驶,必须配备有更高精度的激光雷达传感器。本文对近年来车载激光雷达的主要技术分支进行了梳理,并对各技术分支近年来主要的专利申请进行了介绍,希望从中总结出车载激光雷达技术的发展趋势。
2 主要技术分支
2.1 机械式旋转激光雷达
机械式旋转激光雷达是在自动驾驶汽车上最先应用的激光雷达产品,顾名思义,其是通过部件的机械旋转来完成激光扫描的,通过持续旋转发射部件,原本呈线状扫描的激光束实现了面状扫描,进而达到了全方位的3D扫描。机械式激光雷达具有扫描速度快、接收视场小、可承受激光功率高的优势。
机械式多线雷达产生多线的方式是多个激光源复用同一个或一组透镜,排布在透镜的焦平面上的不同高度,由此产生垂直方向不同的指向性,构成多线。
激光雷达的老牌厂商——美国 Velodyne公司在机械旋转式产品中处于领先地位,其于2007年申请的专利(WO2008008970 A2)公开了一种安装于车顶中央的机械激光雷达,该激光雷达系统包括8个激光器,每个形成 64个元件激光雷达系统,即实现 64 线Lidar,具有360° 水平视场和26.8° 垂直视场,通过旋转系统达到20Hz的旋转速率,从而提供较高的点云更新速率,TOF 测量的标准偏差 ≤5cm(图2)[5]。
德国的Quanergy公司于2014年提出的一件专利申请(US2014211194 A1)涉及机械式激光雷达 10,其中静态基座50包括马达和分布式电子元件,旋转转轮60 包括光电元件 70(包括光学发射器和光学接收器)、准直和聚焦透镜 80以及分布式电子元件。该申请通过设置最后低的最低电压阈值以避免丢失低强度脉冲,从而消除模糊性以提高该雷达在恶劣天气的表现(图3)[6]。

图1 激光雷达探测原理Fig.1 Mechanism of LiDAR detection

图2 LiDAR 示意图(引自专利 WO2008008970 A2):152-壳体,154-第一激光雷达系统,156-第二激光雷达系统,158-旋转部)Fig.2 Schematic illustration of LiDAR(cited from patent WO2008008970 A2): 152-housing, 154-first LiDAR system, 156-second LiDAR system, 158-rotating section

图3 LiDAR 示意图(引自专利 US2014211194 A1)Fig.3 Schematic illustration of LiDAR(cited from patent US2014211194 A1)
上海禾赛光电科技有限公司于2018年申请了一种大视场近程激光雷达(CN108761471 A),包括转子100、激光发射系统 200和接收系统 300,转子 100具有相互隔离的发射舱 105和接收舱 106,激光发射系统200设置于发射舱 105 内,接收系统 300 设置于接收舱 106 内,通过光纤固定装置 203 结合光纤耦合技术能够固定任意数量的光纤,实现激光雷达的高线束(图4)[7]。
深圳市速腾聚创科技有限公司于2018年申请了一种多线激光雷达系统(CN108957424 A),包括旋转部 1和固定部 2,可实现 360° 全角度扫面,旋转部1上设置有发射阵列 10,用于发射多路出射激光;发射阵列 10 包括沿竖直方向依次排列的三组发射板组101-103;其中发射板组 101和103 均包括数量相同的两个发射板子集(1011和1012、1031和1032),且相应的两个发射板子集均在竖直方向上交错排列;发射板组 102 则包括至少一个发射板 100;发射板组101和103的发射板 100 上包括一个发射器,发射板组 102的发射板 100 上包括多个发射器;每个发射板100 与水平面的夹角均不同且为锐角。该申请通过精简器件的使用节省空间,减轻重量,发射端反射镜组合接收端反射镜组分别对光路进行折叠,使雷达体积得以压缩(图5)[8]。
为了实现高精度的测量,机械式激光雷达通常要求较多的运动部件,而为了实现精密光学对准,装调也需要耗费较大的工作量,从而导致这类激光雷达的价格较为昂贵,量产成本较大。另外,由于机械扫描结构中的马达和多面棱镜具有较大体积和重量,在长时间运转中容易造成磨损,可靠性将随之降低。

图5 雷达示意图(引自CN108957424 A)Fig.5 Schematic illustration of LiDAR(cited from patent CN108957424 A)
2.2 MEMS 激光雷达
MEMS(Micro-Electro-Mechanical System,微机电系统)激光雷达较好地克服了机械式扫描激光雷达体积较大、只适合于顶装的不足。MEMS 激光雷达从产品外形上看不存在可见的机械旋转部件,但是在内部藏有微小的微振镜部件,通过集成在芯片上的微振动镜反射激光仍可实现 360° 全方位扫描。
韩国公司 Msotek 于2015年申请的专利(KR20160113794 A)中使用 MEMS 镜作为激光雷达的微镜,具体地,激光雷达系统包括光源 100、设置在光源 100 上方的光源镜 120、设置在光源镜 120 侧方的接收镜 130和旋转微镜 140,旋转微镜以沿两个轴线方向可旋转的方式设置在光源光的光路径上以使得其反射面的方向随时间可变,并且通过随时间改变方向来朝向前方反射光源光以作为扫描光。通过仅装置内部的微镜旋转而整体不旋转,激光雷达装置体型进一步紧凑(图6)[9]。
2017年以色列公司 Innoviz 申请的一件专利(WO2018055449 A2)涉及MEMS 激光雷达,利用来自时空配准的两个光源的激光束提高信噪比、提高重叠区域内目标的定位范围和定位精度。具体而言,控制激光源,使得激光源的光通量在一个视场的多个扫描范围内变化,视场包括近场部分和远场部分,控制光偏转器以扫描视场的方式偏转来自光源的光,通过改变光源参数分别检测近场部分和远场部分是否存在目标(图7)[10]。
上海思致汽车于2018年提出了一件基于微机电系统的广域激光雷达系统(CN108710138 A),其通过MEMS 半球面微镜与移动模块的配合,使得 MEMS半球面微镜可以在平面上进行相应方向的运动,从而实现 180°×180°的扫描范围(图8)[11]。
MEMS 激光雷达虽然能解决雷达小型化的技术问题,并得益于MEMS 技术的相对成熟能够降低整体成本,但是仍然存在接收光路复杂、本质上的振动结构影响使用寿命的缺陷。
2.3 光学相控阵(OPA)激光雷达
相控阵技术已经在雷达领域得到了普遍的应用,其具有无需机械转动即可改变扫描方向的优势,而这种优势应用于激光雷达测量中,则彻底消除了机械式旋转激光雷达和MEMS(Micro-Electro-Mechanical System)激光雷达的宏观机械转动/微观机械转动。

图6 雷达示意图(引自专利 KR20160113794 A)Fig.6 Schematic illustration of LiDAR(cited from patent KR20160113794 A)

图7 雷达示意图(引自专利 WO2018055449 A2):216-非对称偏转镜,116-传感器,112A-主光源,112B-次光源)Fig.7 Schematic illustration of LiDAR(cited from patent WO2018055449 A2): 216-asymmetrical deflector, 116- sensor,112A- primary light source, 112B- secondary light source)
在OPA(Optical Phased Array)激光雷达中,若干个发射单元组成发射阵列,通过调节发射阵列中各发射单元的相位差改变激光光束的出射角度,在设定方向上产生互相加强的干涉从而实现高强度的指向光束。
Quanergy公司于2014年申请了基于PIC(光子集成电路)的OPA 雷达系统 (US2016161600 A1),雷达传感器 10 包括光学相控阵发射器 20,接收器 30,处理器 40和一个或多个印刷电路板 50,光学相控阵发射器 20 包括由微加工和/或纳米加工技术生产的OPA PIC,设置延迟线的调谐元件使光学天线发射具有特定相位延迟的光束,通过发射光束的干涉形成所需的远场辐射图案,整个系统没有任何机械旋转部件。应用于车载环境时,车身前部和后部多个位置安装激光雷达传感器10(图9)[12]。
Blackmore公司于2017年申请了利用外差检测技术实现测距的OPA 激光雷达系统(US2018224547 A1),其工作方式包括基于代码调制来自激光器的光信号以产生并发送相位编码光信号,将返回的光信号与参考光信号混合,检测该混合光信号以产生电信号,确定电信号的同相分量和正交分量之间的交叉谱,基于交叉谱中的峰值确定返回的光信号的多普勒频移(图10)[13]。
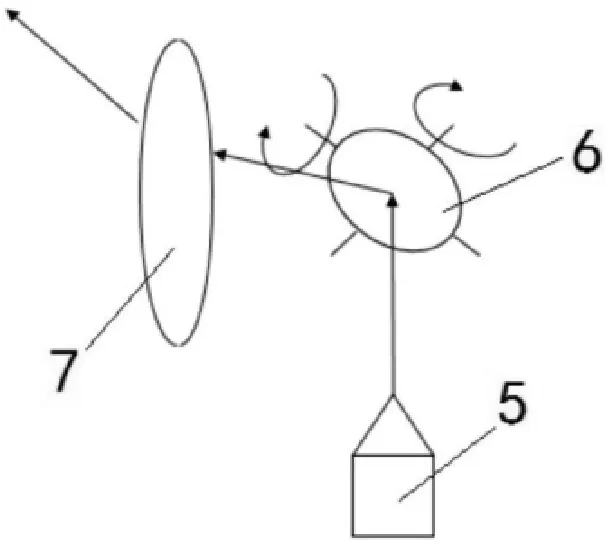
图8 雷达示意图(引自专利 CN108710138 A):5-激光器,6-MEMS微镜,7-扫描角度扩大镜头)Fig.8 Schematic illustration of LiDAR(cited from patent CN108710138 A): 5-laser, 6-MEMS micromirror,7-magnascope)

图10 雷达示意图(引自专利 US2018224547 A1)Fig.10 Schematic illustration of LiDAR(cited from patent US2018224547 A1)
由于OPA 激光雷达的相控阵工作机制容易引起旁瓣,使得激光能量被分散,从而影响探测距离和角分辨率。
上海师范大学于2013年提出的涉及相控阵激光扫描旁瓣抑制装置的专利申请(CN102866394 A),包括主振激光器以及相位补偿板,主振激光器与相位补偿板之间依次设有扩束准直器以及光学相控阵扫描器,光学相控阵扫描器的输出端面至相位补偿板的距离满足分数泰伯效应自成像条件,相位补偿板的相位于激光阵列光场费涅尔衍射传播到分数泰伯距离处光场的相位相对应,该装置可产生高光束质量的非机械扫描光束输出[14]。
2.4 闪光(Flash)型激光雷达
Flash 型激光雷达属于非扫描式工作方式,其采用单脉冲测量直接向各个方向漫射,仅需一次快闪便能照亮整个场景,利用飞行时间成像仪接收发射信号并形成2D或3D图像。相较于扫描式激光雷达,Flash 型激光雷达的优劣势都很明显,优势在于能够快速捕获整个场景,劣势在于探测距离超过一定长度(例如几十米)后,返回的光子数量有限,探测精度明显降低。
美国亚德诺半导体公司于2016年申请的专利(US2017343653 A1)涉及Flash 激光雷达系统,该系统将视角分成多段,照明器阵列中的每个照明器对应于特定分段的视角,光检测器阵列也被分为多个亚组,每个亚组也对应于特定分段的视角,照明器分别向视角的对应分段依次发射光束脉冲,多个光检测器亚组依次从视角的多个分段接收反射回来的光束脉冲,通过这种分段分组的方式有利于克服探测距离增加所导致的目标对象上照射密度降低的问题(图11)[15]。

图11 雷达示意图(引自专利 US2017343653 A1)Fig.11 Schematic illustration of LiDAR(cited from patent US2017343653 A1)
上海机电工程研究所于2018年申请了名为“闪光式激光雷达回波信号物理图像模拟系统和方法”的专利(CN108387907 A),该申请致力于解决 Flash 激光雷达成像像素规模不断增加所导致的回波信号模拟难度增大、成本增加的技术问题,所采用的技术手段为将三维目标沿距离维进行切片,时间切片的间距由精控延时模拟,每个切片的图案由微快门阵列器件模拟,激光雷达到目标的距离由粗控延时模拟,将传统二维空间域所需的与像元数匹配的MhN个通道数量较少为时间域的K个通道[16]。
2.5 连续波调频(FMCW)激光雷达
当前大部分车载激光雷达都采用“TOF(Time OF Flight)”的计算原理,即基于飞行时间来测算距离,TOF 测量方法简单快速,但随着探测距离的增加其受其他信号源干扰的缺点变得更加明显,而更为复杂的连续波调频(FMCW)方法能够克服此类问题。FMCW 向目标发射连续的调制频率激光束,该激光束分为两路,一路光束飞向目标并被反射,另一路光束与反射回来的光束重新结合,由于两路光束飞行距离不同,因此能够产生一个具有差频的干涉图像,从中可计算出第一路光束的飞行距离[17]。
Strobe公司于2015年提出了关于FMCW 激光雷达的专利申请(US2016299228 A1),其通过将激光源光耦合到“回音壁模式”的光学谐振器上,用于降低源激光的线宽,从而产生高线性度和可再生的光啁啾,距离分辨率可以达到厘米级[18]。
美国 HRL 实验室于2017年申请的一件专利(US2018210068 A1)涉及使用双频激光器的FMCW 激光雷达,其不需要调制器而能提供从 0Hz的大位移拍频,由于在不使用任何电子或电光装置/调制器的情况下完成光谱位移,能够简化系统并降低测量噪声。双频激光器的一个频率的辐射用作参考辐射,并在光电探测器处与双频激光器的另一频率的辐射混合,该频率从远程物体散射或反射,从而获得明确的速度测量(图12)[19]。
3 技术发展趋势
从 2012年5月谷歌(Google)正式获得美国历史上为自动驾驶汽车颁发的第一张执照到预估 2020年激光雷达市场规模将达到2.7 亿美元,从最初谷歌搭载 Velodyne公司的64 线机械式旋转 LiDAR(Light Detection And Ranging),到越来越多的研发机构致力于早日实现车规级激光雷达,我们愈加清楚地认识到,作为环境感知的关键传感器之一,车载激光雷达技术的发展在自动驾驶大潮中扮演着非常重要的角色,而自动驾驶的行业需求亦推动着车载激光雷达领域的快速发展。
通过上文对近年来车载激光雷达主要技术分支的梳理,可以看出,车载激光雷达整体上沿着小型化、低成本化的技术路线演进。

图12 雷达示意图(引自专利 US2018210068 A1)Fig.12 Schematic illustration of LiDAR(cited from patent US2018210068 A1)
机械式旋转激光雷达依托于成熟的机械扫描技术,是最早在车载激光雷达中得到应用的技术分支,其主要的改进难点在于设备小型化和提高垂直分辨率之间的天然矛盾,而其商业化量产的最大障碍在于复杂机械结构带来的高价格、高装配周期等一系列高成本。
从主要研发者的研发态势来看,彻底消除机械式旋转结构的技术分支(即“固态激光雷达”)是车载激光雷达未来的主流发展趋势。分析其原因,固态激光雷达由于采用电子部件替代了机械旋转部件实现扫描,具有低成本、体型小的优势,低成本意味着量产成为可能,体型小则可脱离顶装安装方式,集成至传统车辆的外观(例如可安装于车辆的进气格栅、后视镜等位置)。此外,由于摒弃了需要精确光学配准的机械旋转部件,固态激光雷达的使用寿命变得更长,装配难度因可交由软件控制因而下降。综合来看,固态化车载激光雷达是未来最有可能产生车规级产品的技术分支。但是需要认识到,目前的固态激光雷达分支尚处于研究阶段,技术路线尚未定型,主流的解决方案包括光学相控阵(OPA)激光雷达和闪光(Flash)型激光雷达,其需要解决的技术问题还有很多。这主要体现在:单个固态激光雷达传感器不能实现 360°扫描探测,需要在不同方向布置多个传感器以完成全方位扫描,因此虽然单个传感器成本在下降,但整体配置后是否还具有价格优势有待考虑;对OPA 激光雷达而言,其制造工艺难度较大,还需要研究如何消除旁瓣的影响;对Flash 型激光雷达而言,如何改善探测距离是亟待解决的问题。
将旋转扫描结构从“宏观”改为“微观”的MEMS 方式被认为是车载激光雷达走向固态化的过渡阶段,因此也被称为“混合固态”激光雷达,但是由于全固态激光雷达也并未定型,因此不排除混合固态激光雷达随着技术的进步找的新的突破点。
在测距原理方面,大部分车载激光雷达采用了TOF 机制,但为了改善远距离探测精度,FMCW(Frequency Modulated Continuous Wave)激光雷达也成为当前车载激光雷达的主要技术分支,由于FMCW机制的复杂性,其对计算能力的要求更高,成像速度也更慢,且探测精度高度依赖于“啁啾”的线性度。
总的来说,车载激光雷达的发展时间并不长,为了满足自动驾驶的迫切需求,低成本化、小型化、固态化是未来的总体发展趋势。
