基于最小二乘法的磁力计误差补偿与校准
2018-02-01,,,,
,,,,
(重庆邮电大学 光电信息感测与传输技术重庆市重点实验室,重庆 400065)
0 引言
行人自主导航系统是指能够实时地提供行人前进方向、当前位置以及速度参数的系统[1],硬件平台集成了三轴加速度计、三轴磁力计和三轴陀螺仪等传感器。其中磁力计在行人自主导航系统中用于提供绝对航行信息[2],而航向的精度直接决定着系统定位的精度。在实际应用中,传感器的固定偏差和随机误差将严重影响数据融合的精度[3],因此对传感器数据进行滤波、误差校准、标定等操作是十分重要的。
传统的校准方法存在计算量大、操作复杂、不易实现等缺陷[4]。例如梁益丰使用总体八位置法对磁力计进行确定性误差参数标定,补偿精度较高,但需要给出正确的参考方向才能进行校准,不适用于实际使用[5];Fang J. 基于约束最小二乘法的椭球拟合的磁罗盘校准,但只能在没有磁干扰下使用[6];Bonnet S. 通过采集传感器数据进行标定,利用椭球拟合可实现磁力计粗略校准,但未考虑传感器自身噪声影响,精度较低[7]。
因此本文设计了一种基于最小二乘法和“8”字校准法对磁力计零偏进行实时校准的方法,通过仿真和实验验证,该算法有效地解决了磁力计误差补偿问题,具有较强的鲁棒性。
1 确定性误差补偿模型
MEMS惯性传感器的误差主要可分为确定性误差和随机误差[8-10]。确定性误差包括固定偏差、比例误差和非正交误差,可通过标定实验来消除。对于随机误差,基于其慢时变、非平稳特性,需建立随机误差补偿方程,通过算法完成误差实时补偿。
磁力计除了上述传感器本身产生的误差外,还易受到外界磁场环境的干扰,主要分为硬磁干扰和软磁干扰[11-13]。硬磁干扰是指磁力计受到永磁铁或被磁化的物体产生的磁场干扰引起的误差。软磁干扰是指软铁材料被当地的地磁场磁化后产生的磁场引起的干扰,如电缆可以产生很强的磁场。在实际测试中发现软磁干扰的影响较小且比较随机,因此可以忽略对其的校准。
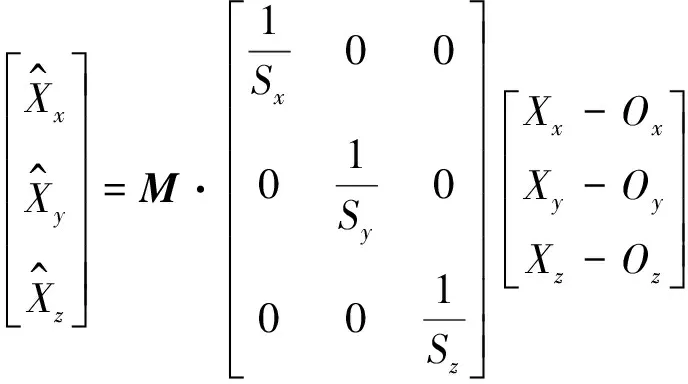
由于传感器的确定性误差一般比较稳定,因此可以通过标定的方法求得相应的参数,将参数带入到误差校准方程中,从而消除传感器的确定性误差。图1所示为传感器的误差补偿模型,式(1)为补偿方程。
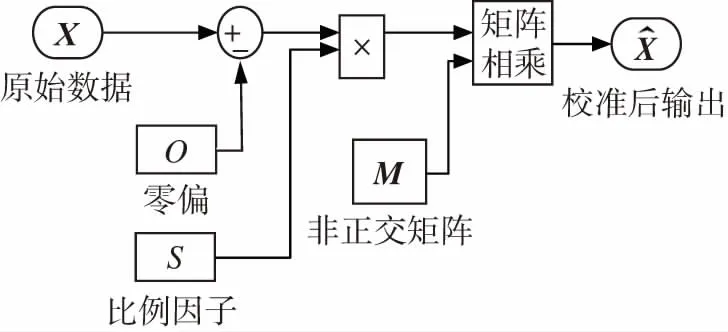
图1 传感器误差补偿模型Fig.1 Sensor error compensation model
(1)
式中,Ox、Oy和Oz分别为传感器x、y和z轴上的固定偏差(也叫零偏),Sx、Sy和Sz分别为传感器在x、y和z轴上的比例误差因子,M为3×3的非正交误差矩阵。因此,零偏O、比例误差因子S和非正交误差矩阵M就是需要确定的误差校准参数。
当外界存在的磁场环境相对稳定时,磁干扰对磁力计所产生的零偏值是固定的。然而,行人是流动的,当外界环境改变时,相应的零偏值也会发生变化,这时需要采用自动校准的方法对磁力计的零偏进行更新。
2 利用最小二乘法修正磁力计零偏
若将式(1)中的非正交误差和比例误差忽略掉,则可简写为
(2)

(3)
第i个测量值的误差为
(4)
式中,Ox、Oy和Oz为磁力计对应的零偏向量O的元素
(5)
式中,Xx、Xy和Xz为磁力计测量值向量X的元素
(6)
式(4)写成矩阵形式为
(7)
假设有N组测量值用于计算参数零偏,由于式(7)中含有4个未知量,因此N必须大于或等于4,则式(7)可写成
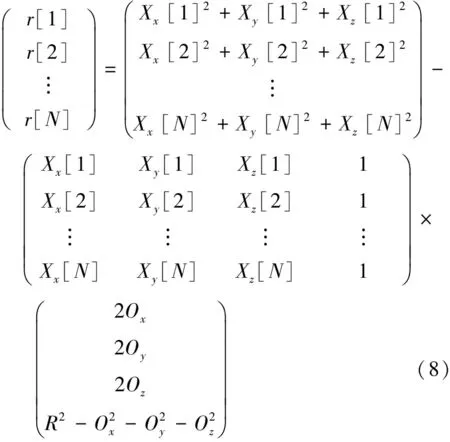
r=Y-Aβ
(9)
式中,Y是只与测量值有关的向量
(10)
A是只与测量值有关的矩阵
(11)
β则是需要被估计的向量
(12)
根据最小二乘估计,需要通过利用一系列磁力计的测量值X和合适的零偏参数O使误差的平方和为最小。因此有
rTr=(Y-Aβ)T(Y-Aβ)
(13)
代价函数J=rTr可展开为
J=YTY-2βT(ATY)+βT(ATA)β
(14)
求J关于β的导数,并令结果为零,则有
(15)
则最小二乘估计由式(16)决定
β=(ATA)-1(ATY)
(16)
通过以上推导过程可以发现,在进行磁力计的零偏校准时,只需要将测得的N组磁力计数据代入到式(16)便可得到零偏O。
3 “8”字校准法实时校准
然而,在使用磁力计进行测量时,需要采用不同角度方向上的测量值,求得的β才是有意义的。在短时间内得到覆盖所有角度的磁力计测量值可通过“8”字校准法,如图2所示。因为测量值要在空间上有一定的不相关性,也就是说这些点要足以约束一个椭球面。如果在空间中随便转几下,得到的测量值可能会在空间上相关,或是不相关性不强,会使校准无法进行或是误差较大。绕“8”字可以使磁力计收集到不同方向的地磁参数,即原则上尽量多地让设备的法线指向一个立体空间的所有8个象限,然后根据其反馈回来的数值计算方向,这样的数据来源比较准确。
图2 “8”字校准示意图Fig.2 Schematic diagram of figure“8”calibration
将硬件测试平台按照图2做“8”字旋转后,得到了磁力计的原始数据,如图3所示,在三维的图上显示出一个球体,但球心偏离了坐标原点,说明磁力计存在着零偏误差。通过加速度计计算得到的横滚角和俯仰角筛选出N=216组磁力计数据,利用这些数据根据式(16)即可求解零偏值。
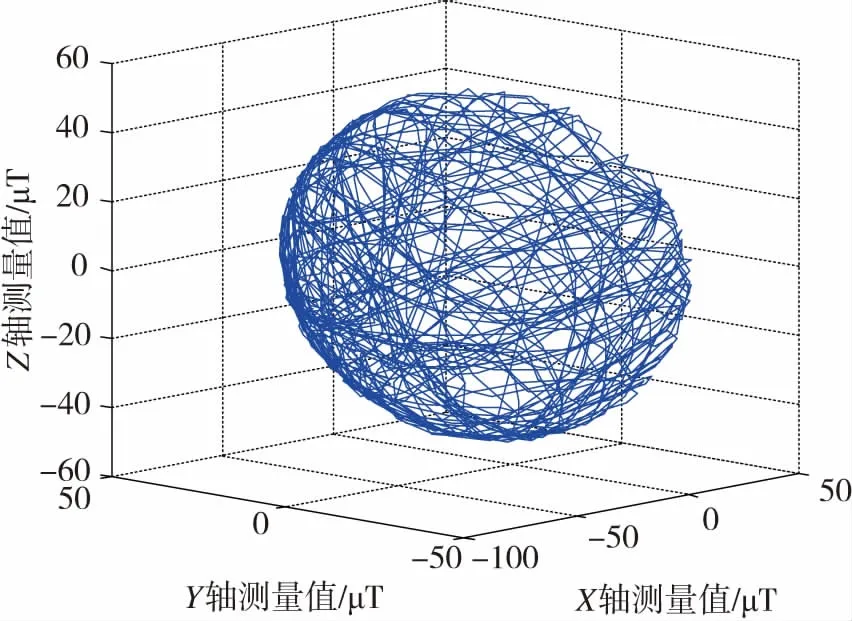
图3 “8”字旋转后磁力计数据三维分布图Fig.3 Three dimensional distribution of magnetometer data after rotation of figure “8”
4 实验验证
本文采用华为的智能手机作为磁力计校准的硬件测试平台。该智能手机集成的MARG传感器包含三轴加速度计(ST LIS3DH)、三轴磁力计(AKM8963)和三轴陀螺仪(ST L3G4200D)。表1给出了传感器的型号与参数。
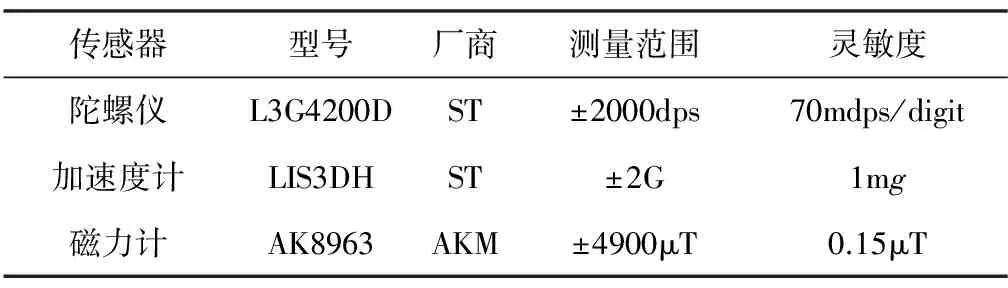
表1 传感器型号与参数
图4所示为手机上安装传感器的坐标轴方向,在整个实验过程中行人均采用手持智能手机的方式进行数据采集,手机坐标负y轴指向前进方向,x轴向右,z轴向下。
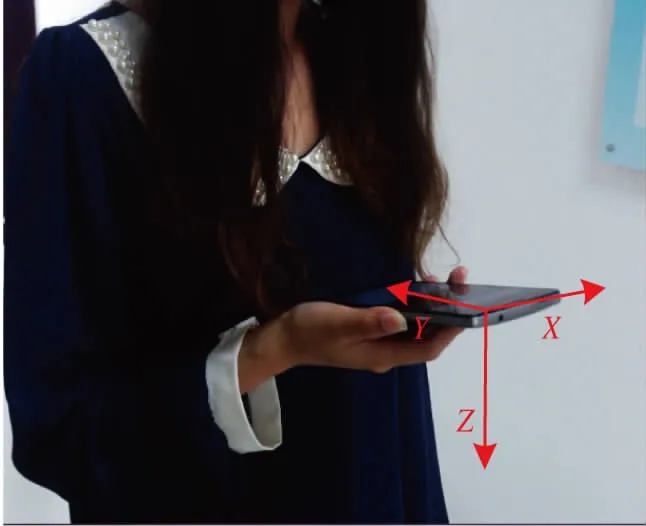
图4 坐标轴定义Fig.4 Coordinate axis definition
如图5所示,经过零偏校准后计算的磁力计模值均在49μT(本地磁场强度)附近。从图5中磁力计模值的原始值可以看出,行人行走时,磁场环境随着外界环境的改变而变化,相应地磁干扰对磁力计所产生的零偏值也随之变化,所以磁力计模值输出波形震荡较大。因此,可以根据磁力计的模值大小及方差作为磁干扰的判断条件,若被判定为有磁干扰时,用户可利用“8”字旋转方式进行实时校准。
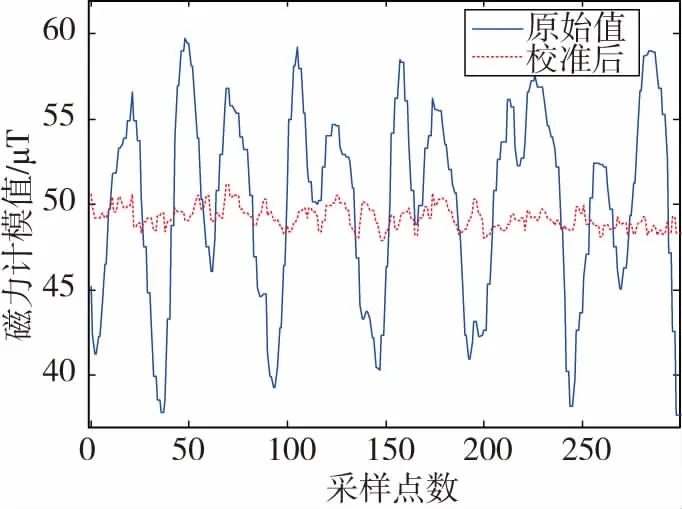
图5 磁力计数据校准前后对比图Fig.5 Comparison chart of magnetometerbefore and after data calibration
5 结束语
本文提出了一种基于最小二乘法和“8”字校准法对磁力计零偏进行实时校准的方法。实验结果表明改进的磁力计误差补偿模型能够有效地提高磁力计抗磁干扰能力,减小了测量误差,证明了该误差补偿算法的可行性和有效性。
[1] Jo K, Chu K, Sunwoo M. Interacting multiple model filter-based sensor fusion of GPS with in-vehicle sensors for real-time vehicle positioning[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 329-343.
[2] 邹波, 张华, 姜军. 多传感信息融合的改进扩展卡尔曼滤波定姿[J]. 计算机应用研究, 2014, 31(4):1035-1038.
[3] 张栋, 焦嵩鸣, 刘延泉. 互补滤波和卡尔曼滤波的融合姿态解算方法[J]. 传感器与微系统, 2017, 36(3):62-65.
[4] 李勇, 刘文怡, 李杰,等. 基于椭球拟合的三轴磁传感器误差补偿方法[J]. 传感技术学报, 2012, 25(7):917-920.
[5] 梁益丰, 许微, 曹勇. MARG传感器误差分析与标定方法研究[J]. 舰船电子工程, 2017,37(9):41-45.
[6] Fang J, Sun H, Cao J, et al. A novel calibration method of magnetic compass based on ellipsoid fitting[J]. IEEE Transactions on Instrumentation & Measurement, 2011, 60(6):2053-2061.
[7] Bonnet S, Bassompierre C, Godin C, et al. Calibration methods for inertial and magnetic sensors[J]. Sensors & Actuators A Physical, 2009, 156(2):302-311.
[8] Tedaldi D, Pretto A, Menegatti E. A robust and easy to implement method for IMU calibration without external equipments[C]//2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2014: 3042-3049.
[9] Lu J, Lei C. Applied system-level method in calibration validation for personal navigation system in field[J]. Iet Science Measurement & Technology, 2017, 11(1):103-110.
[10] Rohac J, Sipos M, Simanek J.Calibration of low-cost triaxial inertial sensors[J]. Instrumentation & Measurement Magazine IEEE, 2015, 18(6):32-38
[11] 庞学亮, 林春生. 基于遗传算法三轴磁传感器校正系数求解[J]. 探测与控制学报, 2017, 39(1):42-45.
[12] 龙礼, 张合. 三轴地磁传感器误差的自适应校正方法[J]. 仪器仪表学报, 2013, 34(1):161-165.
[13] 袁广民, 苑伟政, 秦伟, 等. 强磁干扰环境下磁航向误差补偿技术研究[J]. 航空工程进展, 2012, 3(2): 218-222.
