3.5 GHz车联网信道测量与仿真对比分析
2018-01-26王少石官科林雪何丹萍费丹黄邦彦李广恺王龙河艾渤
王少石 官科 林雪 何丹萍 费丹 黄邦彦 李广恺 王龙河 艾渤
(1. 北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;2. 北京市高速铁路宽带移动通信工程技术研究中心,北京 100044)
引 言
第五代(5G)移动通信技术一直是研究的热点,2015年6月,国际电信联盟(International Telecommunication Union, ITU)明确了5G移动通信系统的总体愿景,由“主要应用场景”和“一组能力指标”共同定义[1]. ITU研究表明,未来频谱需求的缺口将高达1 GHz左右[2],可见5G未来的频谱资源依然短缺,还需寻求开发更多的频谱资源[3-4]. 我国的IMT-2020 (5G)推进组率先提出了未来频谱的使用计划[5],其中,低频段(6 GHz以下)仍然是5G的核心频段,且明确3.3~3.6 GHz为5G的试验频段,并在2017 年之前完成相关频段的试验工作.
凭借具有200 MHz连续频谱的丰富带宽资源,3.5 GHz频段已成为全球的热点频率. 美国、英国、日本和澳大利亚等国家已经于2016年启动了承4G、继5G,3.5 GHz频段的研究和商用工作[6]. 2017年3月,为快速构建我国主推的3.5 GHz低频段产业优势,中国移动前期积极开展了面向3.5 GHz频段的技术研究、标准制定以及产业联合研发[7]. 对业内首次基于5G基站覆盖能力的测试,大唐采用了大规模天线技术,在3.5 GHz频段保持100 Mbit/s的下载速率同时,覆盖距离超过2 km[8]. 2017年6月, 工信部拟在3.3~3.6 GHz和4.8~5 GHz两个频段上部署5G并发布征求意见稿. 由此可见,政策的指导可以使3.5 GHz试验频段的研究方向更加明确.
信道特性分析对5G系统设计和性能评估的意义重大,充分掌握无线信道的特性,可以为运营商提供较为准确的理论依据. 因此,对这些频段的信道特征进行重新考量和深入研究是很有必要的. 获取无线信道特性最为直接而精确的方法就是信道测量[9]. Jinhyung Oh[10]等测量了Dunsan-dong市区和ETRI郊区的3.5 GHz无线实时信道,并分析了路径损耗、时延扩展和信道容量等参数特性. Fusheng Huang[11]等给出了3.5 GHz和6 GHz城市微小区环境的视距和非视距下的无线信道特性. Sun Kun[12]等提出了2.3 GHz、2.6 GHz和3.5 GHz典型城市郊区环境下的经验路径损耗模型.
然而,3.5 GHz频段的信道测量应用于车联网环境的研究成果较少. 目前,欧美国家采用的专用短程通信(Dedicated Short Range Communication, DSRC)技术以IEEE 802.11p标准为基础,且专属无线频率是5.9 GHz频段内的75 MHz频谱[13-14],主要应用在车联网环境中. 中国于2016年开展车联网频率规划研究,并于2017年6月发布征求意见稿[15]. 因此,本文基于3.5 GHz的车联网研究工作将有助于未来5G车联网系统的设计和性能评估.
基于上述分析,本文采用了基于矢量信号发生器和矢量信号分析仪搭建的频域信道测量平台,在城市郊区环境下对3.5 GHz频段进行了车联网场景的信道测量和仿真对比分析. 首先介绍了基于电波传播的信道测量原理,随后描述了测量系统、场景和路线,以及测量数据和仿真数据的对比,最后基于路径损耗模型进行对比分析并得出结论.
1 测量原理
1.1 移动电波传播原理概述
无线通信系统的性能主要受到移动无线信道的制约,无线信道是连接发射机和接收机的媒介.多径效应,即从发射机到接收机存在多条路径,信号在传播过程中,可能经过反射、绕射或散射,这也是无线信道和有线信道的区别所在. 另外,各径上相位的快速变化将造成剧烈的干涉现象,从而导致接收信号强度发生变化而引起多径衰落[16].
移动无线信号的小尺度变化与无线信道的冲激响应直接相关,信道冲激响应(Channel Impulse Response, CIR)涵盖了所有用于模拟和分析信道的无线电传播信息[17]. 假设CIR具有时不变性,则其模型可以简化为
(1)
式中:ai表示振幅;τ表示附加时延;θ表示附加相移;N为等间隔多径分量的最大数目.
对小尺度信道建模时,定义CIR幅度平方的平均值为功率延迟分布(Power Delay Profile, PDP),用于描述不同时延下接收信号的功率分配[18],如式(2)所示:

(2)
关于大尺度衰落,使用经典的对数距离线性函数拟合路径损耗[19],以dB为单位的平均路径损耗模型如下:

(3)
1.2 频域信道测量原理
对于统计信道模型,要通过大量的信道测量来获取参考值,而对于确定性模型,则必须通过理论数据与实际测量数据的对比来预测质量. 由于多径效应在小尺度衰落方面的重要性,因此,在进行传播测量时采用的是宽带信道测量技术. 常见的无线信道测量方法有周期脉冲探测法、滤波器技术和扩频相关法[20].由于频域和时域存在着对应关系,在频域内测量无线信道的CIR是完全可能的. 本文采用的测量方法即频域信道探测,矢量信号源的发射端发出某一频率的信号,经无线传输后,送至矢量信号分析仪的接收端. 利用信道频率响应对应在该频点的相位和幅值,在测量频带内重复上述过程,即得到信道频率响应,经过傅里叶反变换,最终得到信道的时域冲激响应. 频域信道测量法实现简单,正比于频率步进的间隔且受测量设备非线性的影响较小,可使测量成本降低. 另外,频域测量系统由于信噪比更高的缘故,使得高分辨率信道测量经常采用频域测量法[21].
2 测量系统和场景
2.1 测量设备
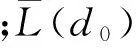
基于频域信道探测法搭建的信号源-频谱仪测量系统,发射端通过控制PC生成多载波信号,再通过时域到频域的转换把多载波信号转变成有规则的矩形脉冲信号. 但是考虑到功率放大器的非线性影响,要对发射机的生成信号进行补偿,这样经过功率放大器就能得到不失真的信号. 发射端的NI PXIe-5673E模块将原始信号通过100 MHz 带宽输出,功率放大器将原始信号的功率放大至41 dBm左右并输出. 接收端的NI PXIe-5668模块利用宽带矢量信号分析仪对接收信号进行实时采集. 考虑到存储数据较大,故先对实测数据进行模块读取,然后再经过磁盘阵列存储以完成对实测数据的保存. 信道测量的主体结构如图1所示. 关于收发端的天线配置如表1所示,天线仿真的方向图如图2和图3所示,另外收发端天线属于单输入单输出(Single-Input Single-Output, SISO) 系统.
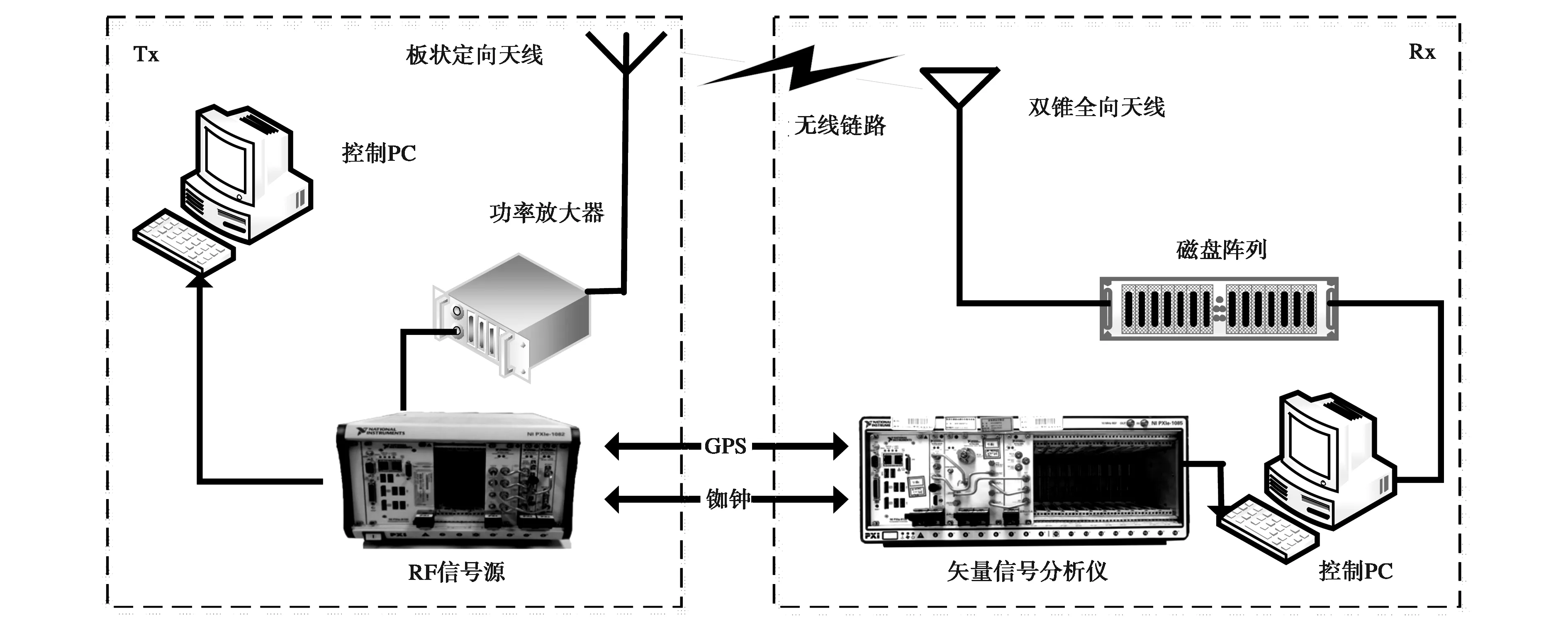
图1 车联网信道测量的主体框架图

天线架设高度/m水平波瓣/(°)垂直波瓣/(°)工作频段/GHz增益/dBi方向角/(°)下倾角/(°)板状定向天线Tx2.559073.4~3.717东偏北8010双锥全向天线Rx1.88360-2.0~180--
图2 板状定向天线图
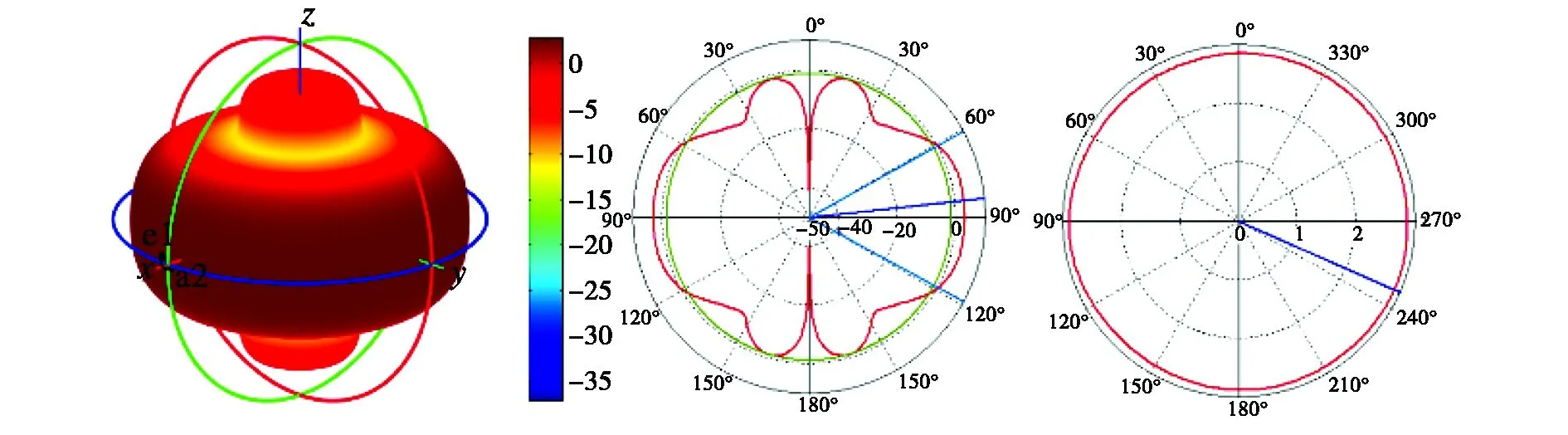
图3 双锥全向天线图
本次测试的中心频率为3.5 GHz,基带采样速率为125 MHz,采样频点数为1 024. 考虑到理想低通滤波器的物理不可实现,为保证抽样不失真,设置基带采样速率的0.8倍即为带宽,测量带宽为100 MHz. 可以推导出子载波间隔为0.12 MHz,最大多径时延为8.19 μs,多径分辨率为8 ns,从而得出可支持的移动台最高速度为6 277 km/h. 由此可知,该测试系统完全满足高速移动的条件和需求. 该系统连接简单、频点可配置、测量时间短,可根据需求进行车载测试.
2.2 测量场景和路线
选择北京市海淀区中关村翠湖科技园云中心高里掌路作为测量区域,该地区属于典型的城市郊区环境. 测量道路平坦且环境空旷,路两侧为低层建筑物,行人少且车辆少,即满足测量的车对车场景需求. 因此,该区域基本满足在发射机和接受机之间存在视距路径的条件. 测量场景的卫星图如图4所示,标定黄色六角星即为发射机位置,图示红色箭头方向规定为接收机运动正方向,与箭头相反的方向即为接收机运动反方向. 路线1和路线2距离分别约为210 m、340 m,接收机(汽车)沿着图4中所示路线以70 km/h的速度来回行驶. 信道测量的天线实景图如图5所示.

图4 测量场景的卫星图
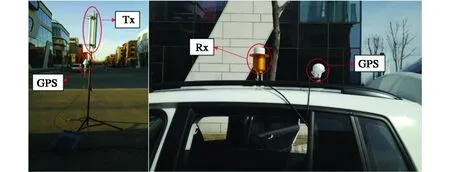
图5 收发端实测天线图
2.3 收发端数据的存储和分析
测量数据存储格式为dat,每个dat文件中含有6 000个接收信号的同相分量和正交分量信息.因此,要把dat文件预处理成只含有同相分量(In-phase Component, IC)和正交分量(Quadrature Component, QC)信息的mat格式. dat文件前3个数类型为double型64位,依次是“采样间隔”、“直流偏移”、“缩放因子”,剩下的即为IQ原始数据,直接与缩放因子相乘即能提取相互交替的IQ原始数据. 存储接收信号的dat文件同时记录了由GPS定位得到的接收机移动过程中的经纬度信息,将文件中的经纬度信息提取出来可以在5~10 m精度范围内还原出接收机的移动轨迹.
根据无线信道的可辨识性可知,接收机要满足时域的奈奎斯特定理[22],即要以足够快的速率对接收信号进行采样,每个CIR可观察的时延约为8.19
μs,满足采样要求. 通过频域滤波(汉宁窗函数)进一步得到有效的参考信号函数X(f)和实测信号函数Y(f),两者相除即得到信道传输函数H(f):
H(f)=Y(f)/X(f).
(4)
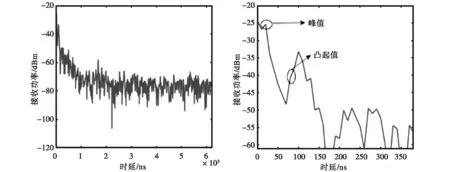
由于所提供的参考信号经过了功率放大器,因此由式(4)计算得到的信道传输函数H(f)所表征的信道信息实际包含了信道以及收发端天线增益,再通过傅里叶反变换即得到原始的CIR. 经频域滤波后,每个dat文件里的所有CIR均保留了821个有效频点,根据式(2)即可得到整个运动路线的PDP. 如图6所示,取一段处于噪声水平的PDP,在求取其平均功率值(门限值)的基础上加6 dB即为最佳门限值[23],图中红线以下的PDP全部去除即可. 考虑到本次测量没有绝对时延,只有相对时延,且前半段时延坐标近3 000 ns,很明显不合理,因此要把时延3 000 ns以前的部分去除以截取最佳的PDP数组. 以汽车正向行驶的路线1和2为例,为方便该场景后期的数据处理,每个dat文件每隔1 000个CIR取1个完整的CIR,由MATLAB生成1个821×4 080的CIR数组.
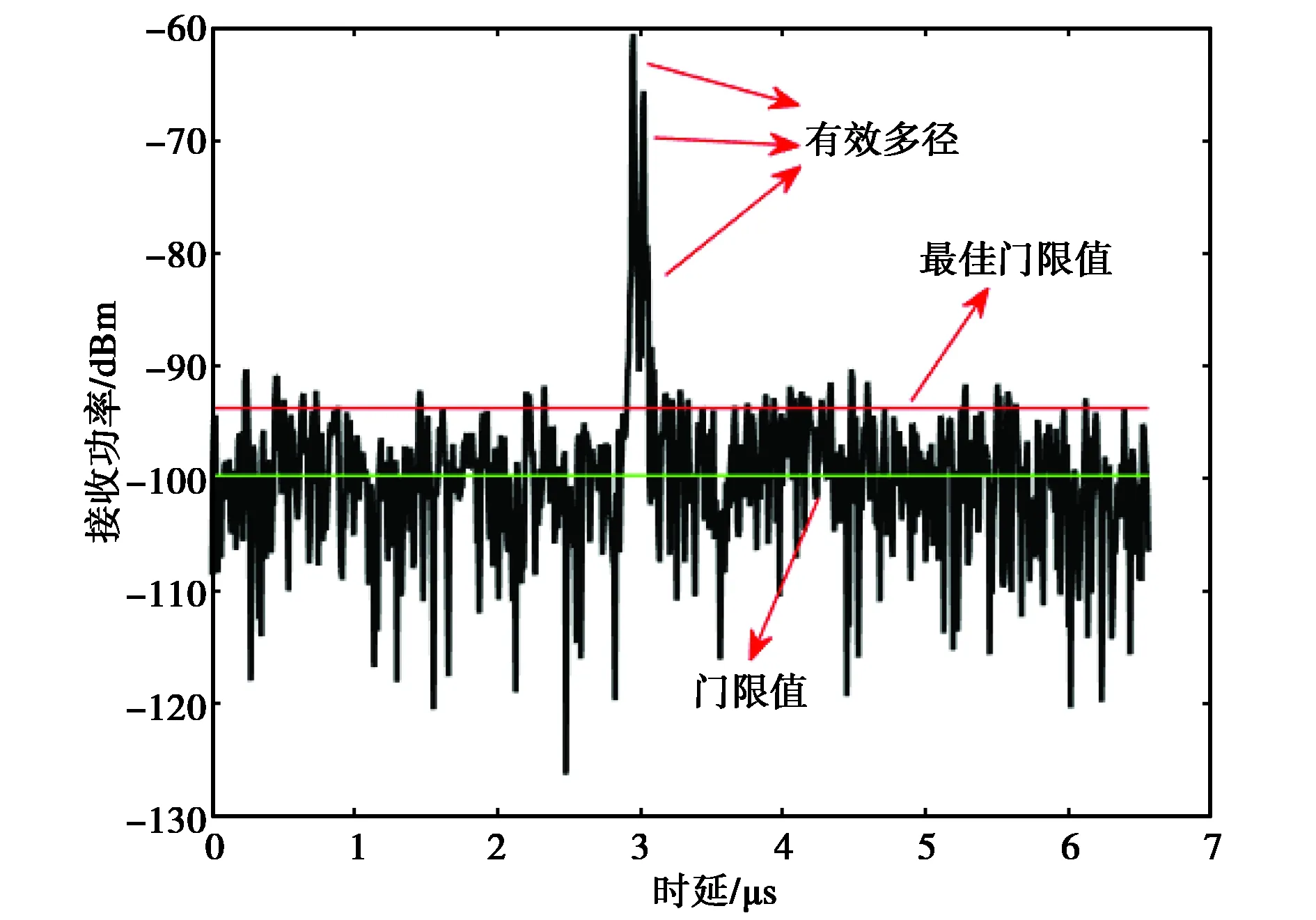
图6 单个CIR的功率时延谱
3 信道仿真和对比分析
3.1 场景模型搭建
电波传播的确定性建模基于传播机制的物理定律,通过追踪每一条到达接收天线的射线,对各种传播机理以及传播环境的构成成分进行分析、阐释、解构与建构. 射线跟踪方法是以电磁理论、几何光学理论和几何绕射理论为支撑,通过模拟射线(光线)的所有传播路径来确定电磁波传播过程中各种传播特性的一种方法[24]. 基于电磁理论计算路径的传播损耗;基于几何光学理论来确定传播过程中的反射、绕射和阴影等;而对于障碍物的绕射,通过引入绕射射线来补充几何光学理论. 由于传输环境的复杂性,一般都会采用以射线跟踪法为基本技术的确定性建模.
射线追踪法主要有镜像法、发射射线法等. 发射射线法计算量大、费时,更适合于面状覆盖的移动通信场景. 镜像法是一种点对点的预测方法,计算精度和预测效率较高,在轨道交通场景中应用前景相对前者更为广阔. 基于镜像法和发射射线法形成了3D射线光学信道模型的确定性建模理论和方法,同时需要建立相对准确的数据库. 由北京交通大学自主研发的3D射线跟踪仿真器,可以用于对不同场景和不同配置的信道进行仿真. 仿真器可以追踪计算在多径信道下电磁波从发射端到接收端产生的各种类型的多径信息,输出空时频域相关的仿真结果. 其中仅每条径就可输出11个参数,包括径的类型、反射阶数、到达时间、传输距离、到达角和离开角等. 利用这些仿真结果,可以进一步萃取出信道的大小尺度参数,如接收功率、莱斯K因子、时延扩展、多普勒扩展、相干带宽、相干时间和极化系数等.
关于射线跟踪仿真器的建模流程,首先需要构建与实际测量相一致的天线模型以及场景模型;其次对必要的仿真参数进行配置,如中心频率、带宽、采样间隔、收发机位置信息以及期望计算和观察的多径类型等;最后将包含必要输入信息的文件转换为仿真器内核可识别的统一格式后,即可对多径信道中的多径进行追踪和计算.射线跟踪仿真器需要一个与实际场景高度匹配的几何模型输入,为了与此次信道测量数据进行对比,实现实测数据与仿真数据的双向验证,本次利用Sketch Up软件对测量场景进行3D模型重建,进而生成射线跟踪仿真器可识别的json文件作为场景输入. 根据实地调研获取的场景整体特征信息以及建筑物尺寸、道路宽度等数据,实现了测量场景的搭建. 重建的场景除了在几何特征上要实现与实际环境最大程度的相似之外,各组成物体的表面材质也需要与实际相切合,因为不同的材质具有不同的介电常数,在仿真过程中会对多径的传输能量产生影响. 图7为实地拍摄的测量场景图,测量的路线图参照图4即可. 本次车联网信道测量选取的场景较为开阔,建筑物分布规律且遮挡物较少,道路宽度为14 m,建筑物高度约为15~20 m,路段1楼间距为10 m,路段2楼间距为8 m. 在测量过程中可以保证收发机间存在一条稳定的直射径,图8是根据实地采集的尺寸数据重建的测量场景模型图.

图7 测量实景图
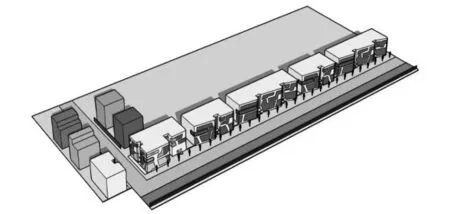
图8 Sketch Up场景模型搭建图
3.2 仿真参数配置
关于收发端的天线模型搭建,参照实际测量天线的设置参数生成仿真所用的天线json文件作为射线跟踪仿真器天线模型输入. 根据2.1节表1提供的天线配置参数,使用计算机仿真技术(Computer Simulation Technology, CST)微波工作室[25]的软件对收发端天线进行仿真功率的计算. 关于发射端的板状定向天线的仿真分析,最大辐射方向为x轴方向,最大增益为16.93 dBi,此天线属于双极化天线. 关于接收端的双锥全向天线的仿真分析,z轴为双锥天线的对称轴,最大辐射方向为xy轴方向球面法线外方向,最大方向性增益为2.90 dBi,极化方向为θ方向,φ方向最大增益小于-36.91 dBi.
关于本次车联网信道测量的环境搭建,射线跟踪仿真器需要设置必要的参数输入,如中心频率、带宽、收发机位置等信息.为了方便实测数据与仿真数据的对比,仿真器的参数配置按照测量方案进行配置,表2所示为发射端采用板状定向天线和接收端采用双锥全向天线的仿真参数配置,在这种配置下
分别进行了收发机位置固定.接收机沿测量方案所设计的移动路径方式(即为路线2)进行仿真建模,如图8所示,并与实测数据进行对比.
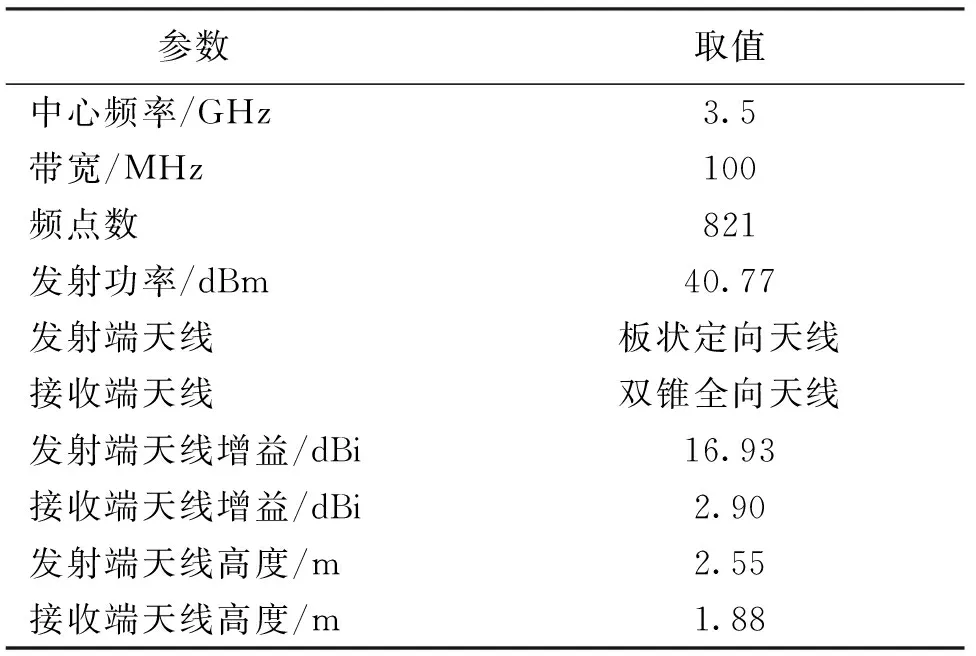
表2 仿真参数配置
3.3 定点测量数据与仿真数据对比及仿真器校正
测量获取了8个定点位置下的信道测量数据,通过实测结果和仿真结果的对比,可以实现对仿真器输入场景模型的几何校正以及场景模型中所使用到的材料的参数校正. 利用Sketch Up软件搭建的场景模型与实际测量环境会存在位置和距离上的误差. 测量与仿真中设置的信道带宽均为100 MHz,电磁波以光速进行传播,因此若位置和距离上的误差大于3 m,实测提取多径时延与仿真得到的多径时延就会产生偏差. 以此为标准对实测数据和仿真数据的多径时延进行对比,调整仿真器输入场景模型以实现场景模型几何误差在3 m之内.
通信环境中反射体表面材质的电磁参数会影响电磁波到达接收端的能量,因此,若仿真器采用的材料库中各材料的电磁参数与实际测量环境中所涉及材质的电磁参数不符,会导致实测结果与仿真结果的能量上产生差别. 通过在合理范围内修改射线跟踪仿真器材料库中材料的电磁参数使仿真数据与实测数据相对应,实现仿真器材料参数校正. 下面以两个定点位置为例进行对比和校正. 另外,以下章节的时延均为相对时延.
3.3.1 场景一
第一个定点位置测量中收发机间的水平距离约为67 m,如图9所示,仿真场景标识了收发机的位置以及仿真器追踪到的多径.
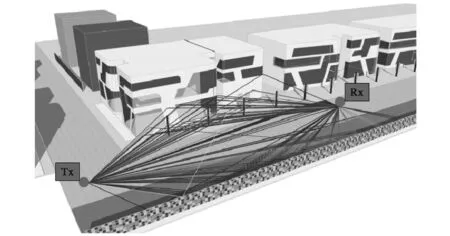
图9 第1组定点收发机位置以及仿真追踪的多径
通常直射径和反射径是接收信号能量的主要贡献成分,同时考虑到散射径在全部观察时延范围内均有分布,若对比时考虑散射径则不易分辨主要多径成分,因此在进行几何校正时只考虑主要多径成分的对比. 首先是对于实测数据的多径提取,根据帕塞瓦尔定理,得到参考信号功率为22.07 dBm.
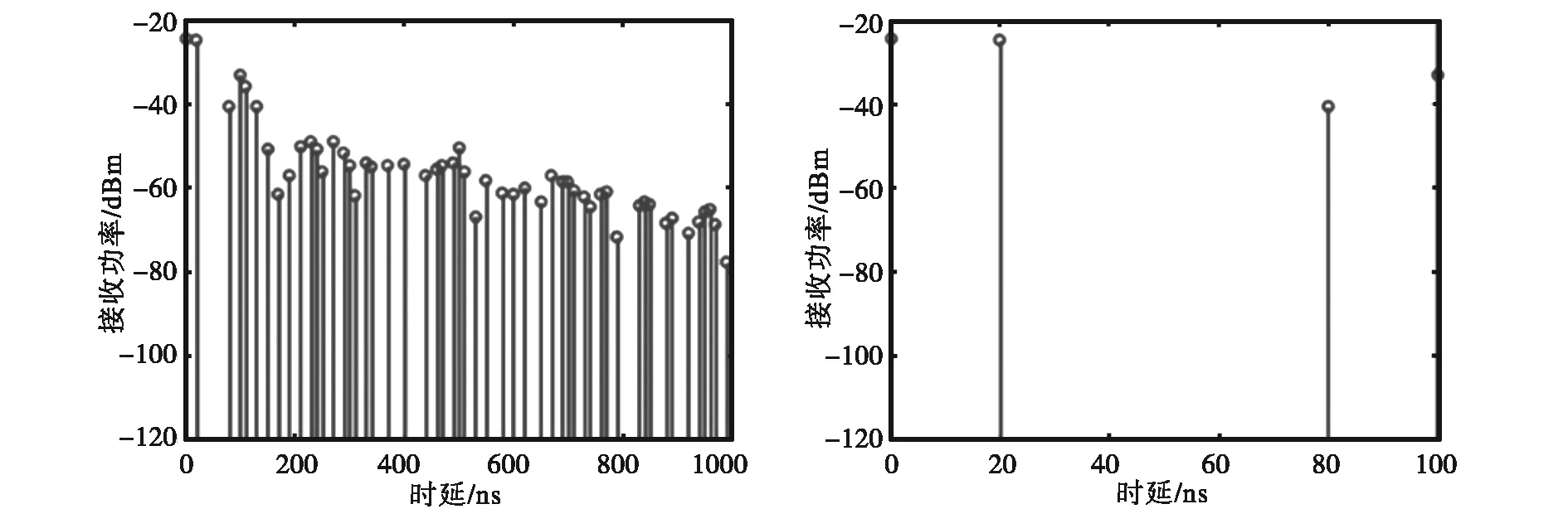
图10(a)是根据实测数据绘制的CIR曲线.图10(b)是实测数据中提取主要多径成分的方法,即提取出CIR曲线中阈值之上的峰值和凸起值作为主要可分辨多径,这里将反射径定为信道中的主要多径成分,而且为接收能量的主要贡献者. 图10(c)为按照图10(b)中所示的方法提取的多径及对应时延,可见在100 ns内的多径的能量比较显著.因此图10(d)截取了100 ns之内的主要多径成分以供与后面的仿真数据进行对比.
关于射线跟踪仿真器输出多径的合并,射线跟踪仿真器可以计算得到每条多径的传输时间以及功率.为了与实测结果对应,需要对多径进行合并,如图11(a)为仿真器输出多径及时延,图11(b)为根据时间分辨率合并得到的多径及时延.
(a) 实测CIR曲线 (b) 实测数据多径提取方法
(c) 实测数据多径提取结果 (d) 100 ns内的实测多径图10 实测数据反射径提取
(a) 多径输出 (b) 多径合并图11 射线跟踪仿真器多径输出及合并
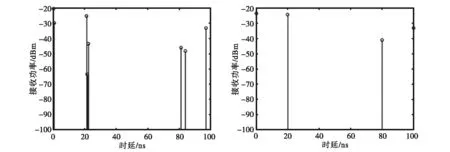
图12(a)为仿真器校正前的对比结果,可见在时延和功率上存在明显差异.图12(b)为进行了几何校正后的对比结果,100 ns内的多径在时延上完全吻合,但在功率值上存在差别. 图12(c)为完成几何校正和材料参数校正后的对比结果,从图中可以看出实测数据和仿真数据在时延和功率上均可对应,两组数据的平均绝对误差为0.45 dB,标准偏差为0.23 dB. 图13为100 ns内没有设置阈值所有多径成分的对比,计算得到实测数据与仿真数据的平均绝对误差为4.27 dB,标准差为4.48 dB.
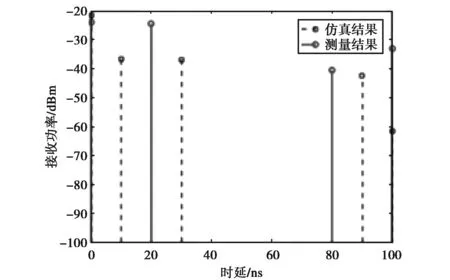
(a) 校正前仿真与实测对比
(b) 几何校正后仿真与实测对比
(c) 几何和材料参数校正后仿真与实测对比图12 仿真器校正对比图
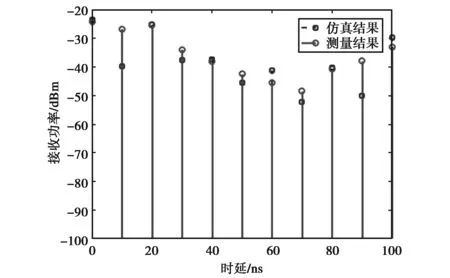
图13 实测多径和仿真多径对比图
3.3.2 场景二
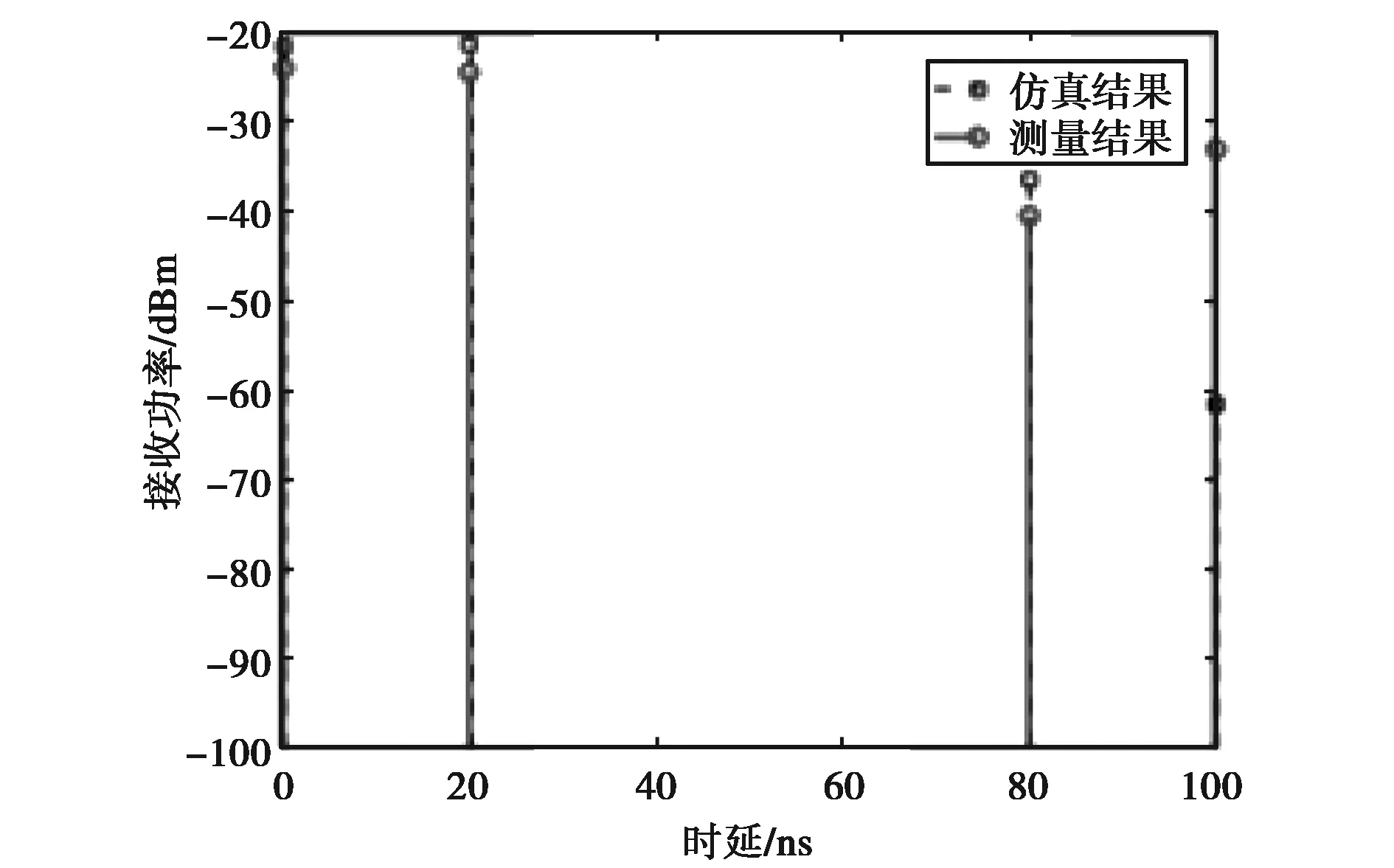
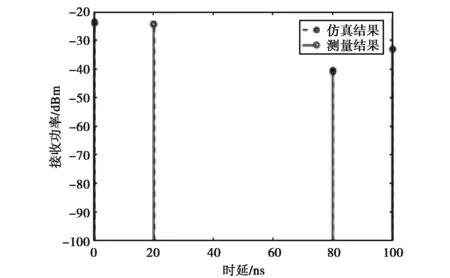
第二个定点位置测量中收发机间的水平距离约为100.50 m,图14所示为场景二收发机部署及追踪的多径. 利用场景一校正得到的场景模型和材料库对场景二进行仿真,得到的对比结果如图15(a)所示. 由于场景二中存在一部分反射体在场景一中没有被校正,因此主要多径在时延和能量上存在差别,进而对未被校正的建筑物进行位置校正,得到如图15(b)所示的对比图,计算得到的平均绝对误差为1.73 dB,标准差为1.58 dB. 图16为100 ns内没有设置阈值全部多径成分的对比结果,平均绝对误差为4.90 dB,标准差6.05 dB.
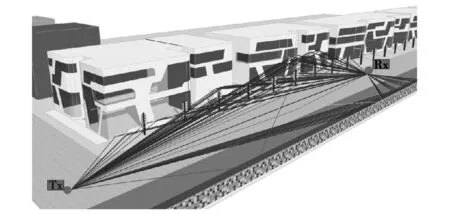
图14 第2组定点收发机位置以及仿真追踪的多径
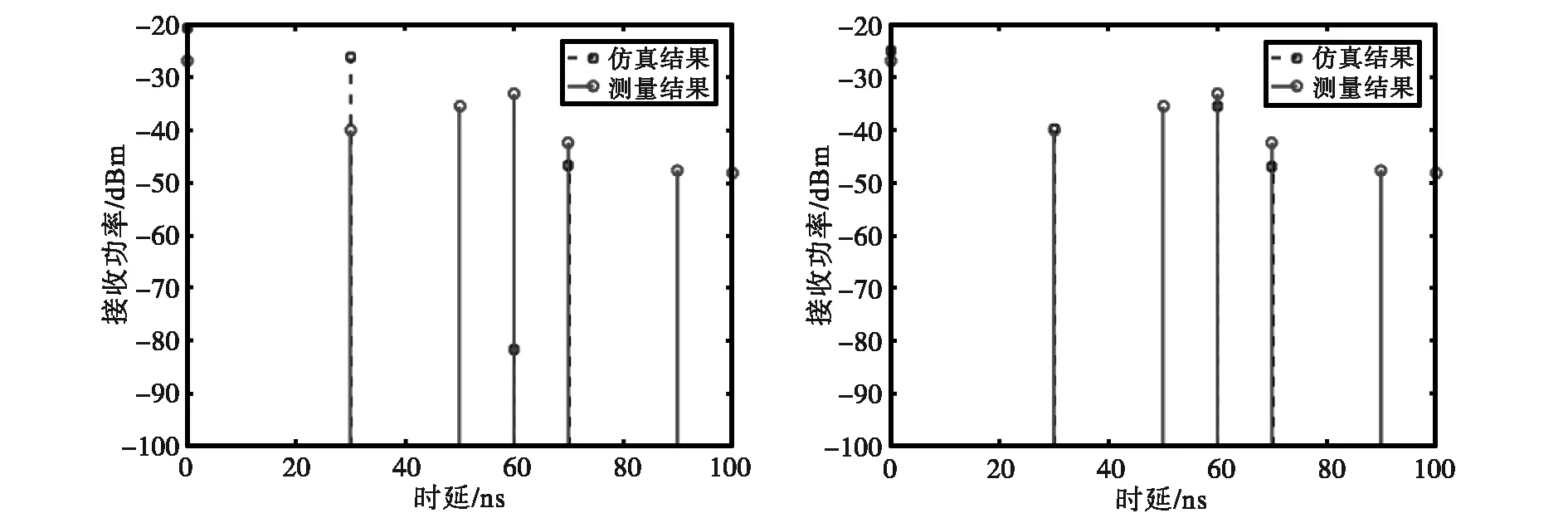
(a) 几何校正前对比 (b) 几何校正后对比图15 场景二实测多径与仿真多径对比图
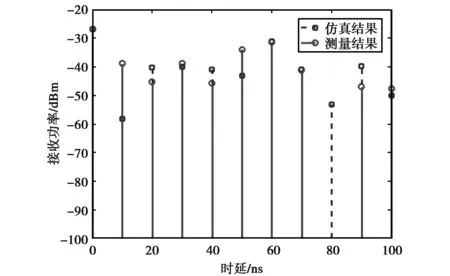
图16 100 ns内全部多径成分的对比结果
3.4 动态测量数据与仿真数据对比及参数分析
选取正向路线2中汽车行驶的一段动态测量数据,以相同的配置进行仿真,通过对几何场景和材料参数校正,进行动态实测数据与仿真数据的对比.
根据式(3),可以计算出实测和仿真两组数据的路径损耗(近地参考距离d0设置为1 m),图17为实测和仿真的路径损耗拟合曲线.拟合得到的路损系数及阴影衰落标准差和仿真相对于实测的相对误差如表3所示,相对于测量场景而言,仿真和测量的路径损耗系数差值为0.12,相对误差为6.4%,阴影衰落标准差的差值为0.29 dB,相对误差为5.6%,从而有效地证明了校正后的仿真器在信道仿真中的
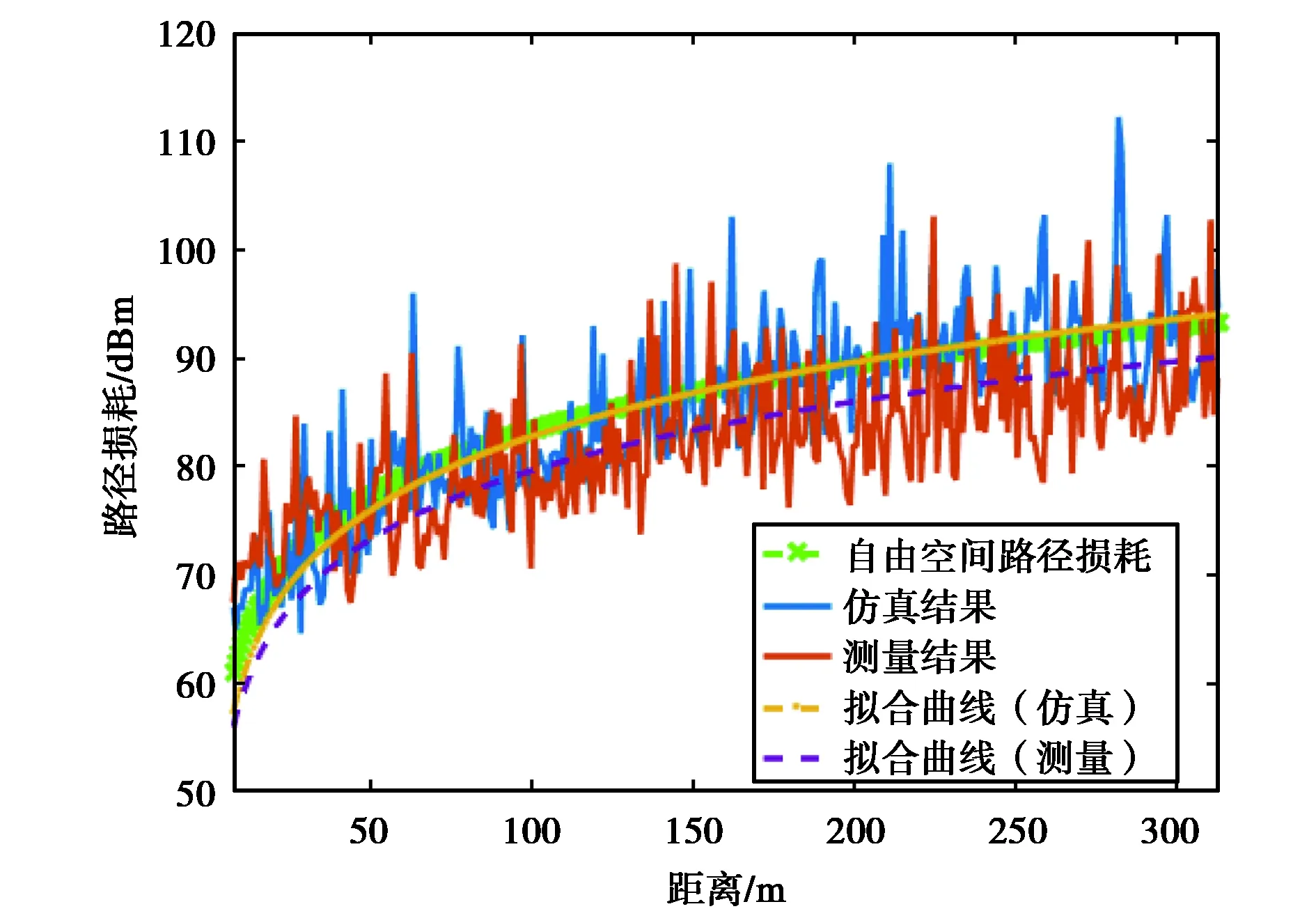
图17 路径损耗曲线及拟合曲线
精确度. 由于多径的影响,测量与仿真的路损系数均低于自由空间路损系数2. 同时,文献[26]在城市郊区场景下5.9 GHz 车联网信道测量的路损参数如表3所示,以此和本文的3.5 GHz城市郊区场景下的车联网信道测量数据对比,由此发现5.9 GHz的路损参数比3.5 GHz要小,由此也验证了本文工作的必要性.
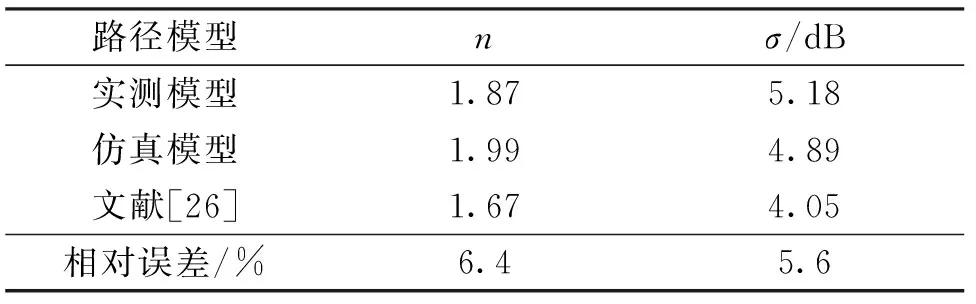
表3 路径损耗拟合参数对比
4 结 论
本文主要完成了3.5 GHz车联网信道测量、信道仿真以及与实测数据进行对比的工作.得到的结论如下:
1) 关于信道测量:车联网通信是当前5G研究的热点问题,需满足测量环境是动态环境、车辆高速移动和相对低的收发天线高度等条件.在“V-to-X”场景下开展3.5 GHz信道的研究工作,选择城市郊区街道环境和利用频域信道测量法对信道进行测量. 分析结果表明:3.5 GHz 频段在城市郊区环境中具有良好的传播特性. 在测量的中心频段上,这是本文与以往5.9 GHz车联网研究工作的不同之处.
2) 关于信道的仿真对比分析:以正向路线2测量场景所得到的数据为例,根据射线跟踪器的仿真流程,首先按照实际测量环境进行了场景模型搭建以及天线模型的构建. 其次遵照测量的基本参数对仿真器的参数等信息进行设置. 由于场景模型的重建会存在距离和位置上的误差,因此根据定点测量数据对仿真器输入的几何模型进行了校正. 此外,环境中反散射体表面材料的介电常数会影响多径的能量差别,在进行几何校正后根据多径功率实现了材料库参数的校正. 利用校正后的几何模型和材料库对接收机沿正弦路线2移动的场景进行仿真并与实测数据进行接收功率的对比,进而对二者的路径损耗进行了对比,结果充分地验证了射线跟踪仿真器在信道仿真中的有效性和准确性. 同时,利用射线跟踪仿真器生成的仿真数据与实测数据进行对比,也是本文研究工作的特色之处.
3) 本文测量和仿真数据的分析结果表明,3.5 GHz 频段在未来5G通信中具有较为广阔的应用前景. 同时,本文的研究内容将为未来5G车联网频段的选择和网络规划提供可靠的研究依据和宝贵的信道信息.
致谢:感谢佳讯飞鸿智能科技研究院为我们的射线跟踪平台提供高性能的云计算资源。
[1] ITU-R. IMT vision-framework and overall objectives of the future development of IMT for 2020 and beyond: M 2083-0[R]. Geneva: ITU, 2015.
[2] ITU-R. CPM report on technical, operational and regular-tory/procedural matters to be considered by the world radio communication conference 2015[R]. Geneva: ITU, 2015.
[3] TAN H F, LI W, WANG T, et al. The analysis on the candidate frequency bands of future mobile communication systems[J]. China communications, 2015, 12(1): 141-148.
[4] BANGERTER B, TALWAR S, AREFI R, et al. Networks and devices for the 5G era[J]. IEEE communications magazine, 2014, 52(2): 90-95.
[5] 李伟, 郑航, 钱肇钧, 等. 基于信道测量的3-6 GHz城市环境传播特性研究[J]. 南京邮电大学学报(自然科学版), 2016, 36(4): 29-34.
LI W, ZHENG H, QIAN Z J, et al. Measuremnt-based urban propagation characterization at 3-6 GHz[J]. Journal of nanjing university of posts and telecommunications (natural science edition), 2016, 36(4): 29-34. (in Chinese)
[6] 杨光. 承4G、启5G,3.5 GHz频段渐成行业新热点[J].通信世界, 2016(27): 40-41.
[7] China Mobile Commucinations Corporation. Guideline for 3.5GHz 5G system prototype and trial[R/OL]. (2017-03-14)[2017-09-11]. http://www.useit.com.cn/thread-14792-1-1.html
[8] 鲁义轩, 赵艳薇. “全球最大5G试验场”新进展:3.5 GHz的百兆速率覆盖能力已接近4G[J]. 通信世界, 2017(9):13.
[9] ABBAS T, NUCKELT J, KURNER T, et al. Simulation and measurement-based vehicle-to-vehicle channel characterization: accuracy and constraint analysis[J]. IEEE trasactions on antennas and propagation, 2015, 63(7): 3207-3216.
[10] JINHYUNG O, BYUNGJIN L, KUNGSEOK K, et al. A wireless channel sounding system for 3.5 GHz band small-cell environmental measurements[C]//2016 International Conference on Information and Communication Technology Convergence (ICTC), 2016: 1227-1231.
[11] FUSHENG H, LEI T, YI Z, et al. Propagation characteri-stics of mobile channel in urban micro-cells at 3.5 GHz and 6 GHz[C]//2016 IEEE 83rd Vehicular Technology Conference(VTC Spring), 2016: 1-5.
[12] SUN K, WANG P, LI Y Z. Path loss models for suburban scenario at 2.3 GHz, 2.6 GHz and 3.5 GHz[C]//2008 8th International Symposium on Antennas, Propagation and EM Theory, 2008: 438-441.
[13] THMOMAS M, HANNES H. 5.9GHz IEEE 802.11p inter-vehicle communication: non-line-of-sight reception under competition[C]//2011 IEEE Vehicular Networking Conference (VNC), 2011: 155-162.
[14] WANTANCE V, MATE B, HSIN-MU T. Vehicular communications survey and chanllenges of channel and propagation models[J]. IEEE vehicular technology maganize, 2015: 55-60.
[15] 工业与信息化部办公厅. 关于征求 《国家车联网产业体系建设指南(智能网联汽车)(2017年)》(征求意见稿)意见的通知[A/OL]. (2017-06-13) [2017-10-30]. http://www.miit.gov.cn/newweb/n1278117/n1648113/c5682986/content.html.
[16] HANZO L, HWANG S H. Reverse-link performance of synchronous DS-CDMA systems in dispersive Rician multipath fading channels[J]. Electronics letters. 2003, 39(23): 1682-1683.
[17] RAPPAPORT T S. Wireless communication: principles and practice[M]. New Jersey: Prentice Hall PTR , 1996.
[18] AI B, GUAN K, HE R S, et al. On indoor millimeter wave massive MIMO channeles: measurement and simulation[J]. IEEE jounal on selected areas in communications, 2017, 35(7): 1680-1682.
[19] GUAN K, ZHONG Z Z, AI B, et al. Propagation measurements and modeling of crossing bridges on high-speed railway at 930 MHz[J]. IEEE transactions on vehicular technology. 2014, 63(2):508-514.
[20] MOLISH A F. Wireless communications[M]. 2nd ed. Wiley, 2010.
[21] 刘蕾蕾, 张念祖, 洪伟. 超宽带信道的频域测量及校准[J]. 电波科学学报, 2012, 27(5): 881-883.
LIU L L, ZHANG N Z, HONG W. Measurement and calibration of UWB channel in frequency domain[J]. Chinese journal of radio science, 2012, 27(5): 881-883. (in Chinese)
[22] PROAKIS J G, SALEH M. Digital communications[M]. 5th ed. McGraw Hill, 2005.
[23] ANDREAS F M, STEINBAUER M. Condensed parameters for characterizing wideband mobile radio channel[J]. Internatinal journal of wireless information networks, 1999, 6: 133-154.
[24] DEGLI-ESPOSTI V, GUIDUCCI D, de'MARSI A, et al. An advanced field prediction model including diffuse scattering[J]. IEEE transactions on antennas and propagation, 2004, 52(7): 1717-1727.
[25] 德国CST公司. CST Microwave Studio[EB/OL].(2017-7-25),[2017-09-11]. http://www.cst.com/products/cstmws.
[26] HERMAN F, VICENT M R, LORENZO R, et al. Path loss characterization in vehicular environments under LOS and NLOS conditions at 5.9 GHz[C]//The 8th European Conference on Antennas and Propagation, 2014: 3044-3047.
