基于射线跟踪的车联网毫米波信道准平稳区间研究
2018-01-26崔壮壮钟章队官科何丹萍
崔壮壮 钟章队 官科 何丹萍
(1.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;2. 北京市高速铁路宽带移动通信工程技术研究中心,北京 100044)
引 言
第五代(the 5th Generation,5G)移动通信具有三大应用场景,分别为增强移动宽带、海量机器类通信和超可靠机器类通信[1]. 面对以上三大应用的需求,频谱短缺成为面临的主要挑战之一[2-3]. 毫米波具有频带宽和丰富的非授权频段等特点[4],已被国际公认作为5G高频段的候选频段. 其中,美国联邦通信委员会已将27.5~28.35 GHz作为毫米波频段的首选频段[5],韩国计划于2018年平昌冬奥会部署工作频段为28 GHz的5G试验网[6]. 众多研究机构也对28 GHz频段信道进行了大量的仿真和实际信道测量[7-9]. 因此,对于28 GHz信道特性的研究十分必要.
目前,针对28 GHz车联网毫米波信道特性的研究较少. 对于车联网信道的研究,频段多在5 GHz左右[10-11],毫米波车联网信道的研究具有一定的前瞻性. 另外,车联网毫米波信道与普通毫米波移动信道相比具有独特的特性:一是结合实际场景,设置特定的收发信机的高度;二是车联网信道需考虑车体本身对信道特性的影响. 而射线跟踪[12]是常用的一种确定性信道仿真方法,利用几何光学与几何绕射一致性理论比较适用于高频段. 毫米波频段较高,波束较为集中,基于射线跟踪进行毫米波信道仿真具有可行性.
对于车联网毫米波信道的研究,信道准平稳区间是一个重要参数,指的是在此区间内信道特性不发生大的变化[13-14]. 另外,通信算法的设计和仿真依赖于信道的二阶统计特性,因此,准平稳区间的研究具有十分重要的意义. 对于车联网信道准平稳区间的研究大多是利用局部散射函数(Local Scattering Function,LSF)和时变相干函数的分析方法,其基本思想是利用信道的二阶统计特性求信道的相关性和差异度[15-16]. 对于多入多出(Multiple-Input Multiple-Output,MIMO)信道,相关矩阵距离(Correlated Matrix Distance,CMD)[17]是计算准平稳区间的常用方法,通过计算收端或发端的相关矩阵,利用判决门限求出准平稳区间. 对于单入单出(Single-Input Single-Output,SISO)信道,可以利用功率相关(Correlation of Power,CP)算法求出不同采样点处的相关性[18],设定门限判决即可得到准平稳区间. 另外,也可利用谱散度(Spectral Divergence,SD)算法计算不同采样点处的差异度计算准平稳区间[19].其他的一些研究还包括利用阴影衰落的功率计算相关性和连续功率时延谱求相关等[20-21].
综合以上研究背景和研究目的,本文利用射线跟踪仿真器进行了28 GHz车联网中车对基础设施SISO信道准平稳区间的研究,从准平稳区间的计算、仿真和应用三个方面展开.首先介绍准平稳区间计算常用的CP和SD算法;其次,基于射线跟踪获取的信道信息,利用两种方法对曼哈顿场景进行准平稳区间的计算;最后,利用信道准平稳区间的判决结果减少仿真器的采样点数,证明了利用信道的准平稳特性可以有效提高仿真器的运算速度,对于车联网毫米波频段的系统级设计和仿真具有参考意义.
1 信道准平稳区间理论
通过射线跟踪仿真器进行信道仿真,利用仿真得到的信道冲激响应(Channel Impulse Respond,CIR)计算出功率或功率谱,从而可以求得信道的准平稳区间. 其计算方法可分为两类:一类是对功率或功率谱求相关性;另一类是对功率谱求散度. 本文针对两类计算方法,分别介绍利用接收功率求相关的CP算法和利用功时延率谱求散度的SD算法.
1.1 CP算法
CP算法的基本思想是对连续采样点的功率进行逐一相关运算,把某一采样点处大于门限值的连续间隔定义为准平稳区间的长度. 文献[18]给出了计算准平稳区间的一般方法. 首先通过仿真可以得到基于时间的信道脉冲响应h(ti),瞬时功率可以表示为ph(ti)=|h(ti)|2,对功率谱进行离散化并经过长度为40倍波长的滑动窗滑动平均可以得到基于距离的功率值为
(1)
(2)
式中:N为滑动窗长度;Δx为距离采样间隔,m;λ为波长,m;下标i代表时间采样点或者距离采样点.
通过计算不同采样点处两两的相关程度,可以得到功率相关矩阵,其元素具有如下形式:

(3)
式中,下标j代表时间采样点或者距离采样点.
通过功率相关矩阵,我们可以设定门限判决准平稳区间,得到准平稳区间为
dS(i)=(nmax(i)-nmin(i))Δx.
(4)
式中:nmax(i)表示某一采样点下满足判决门限情况下的最大索引;nmin(i)表示某一采样点下满足判决门限情况下的最小索引,二者具有如下形式:

(5)

(6)
式中:m表示准平稳区间判决检索下标;n表示采样点的总数.
1.2 SD算法
SD算法较为简单,文献[19]介绍了其基本思想是功率时延谱的几何平均和算术平均之比,得到的参数即为两个功率时延谱之间的散度.通过射线跟踪仿真器可以得到包含时延信息的信道脉冲响应h(ti,τs),针对车联网场景,将采样时间转化为采样距离可以得到
h(xi,τs)=h(vti,τs).
(7)
式中:xi代表采样间隔,m;v代表汽车行驶速度,m/s;ti为采样时间,s;τs为时延分辨率,s.
由式(7)可以得到基于距离的功率时延谱p(xi,τs)具有如下形式:
p(xi,τs)=|h(xi,τs)|2.
(8)
基于上述得到的功率时延谱,通过某一采样点处的功率时延谱与其他采样点求散度,文献[19]定义了其基本形式,得到的功率谱散度矩阵的元素r(xi,xj)具有如下形式:
(9)
式中,Nτ是时延间隔的最大点数,满足τmax=Nττs,τmax是某一采样点处的最大时延,s.
2 信道准平稳区间仿真
2.1 仿真场景和参数配置
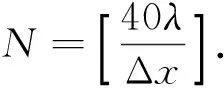
针对上述的两种算法,本文基于纽约大学曼哈顿城区的实际环境[22],建立了SketchUp模型,利用射线跟踪仿真器,进行了28 GHz毫米波车联网V2I信道仿真. 如图1所示,图中直角箭头所指方向代表汽车行驶的轨迹,接收机置于汽车顶部,汽车行驶的两段距离具有对称性,各为100 m;发射机的位置位于街道拐弯处,保证行驶过程中接收机一直具有视距(Line-of-Sight,LOS)环境. 考虑实际车高和车联网基础设施的路边单元的高度,设置接收天线和发射天线的高度分别为2 m和8 m. 如图2所示,我们把仿真场景分为两段,更加直观地展示仿真环境的设置.
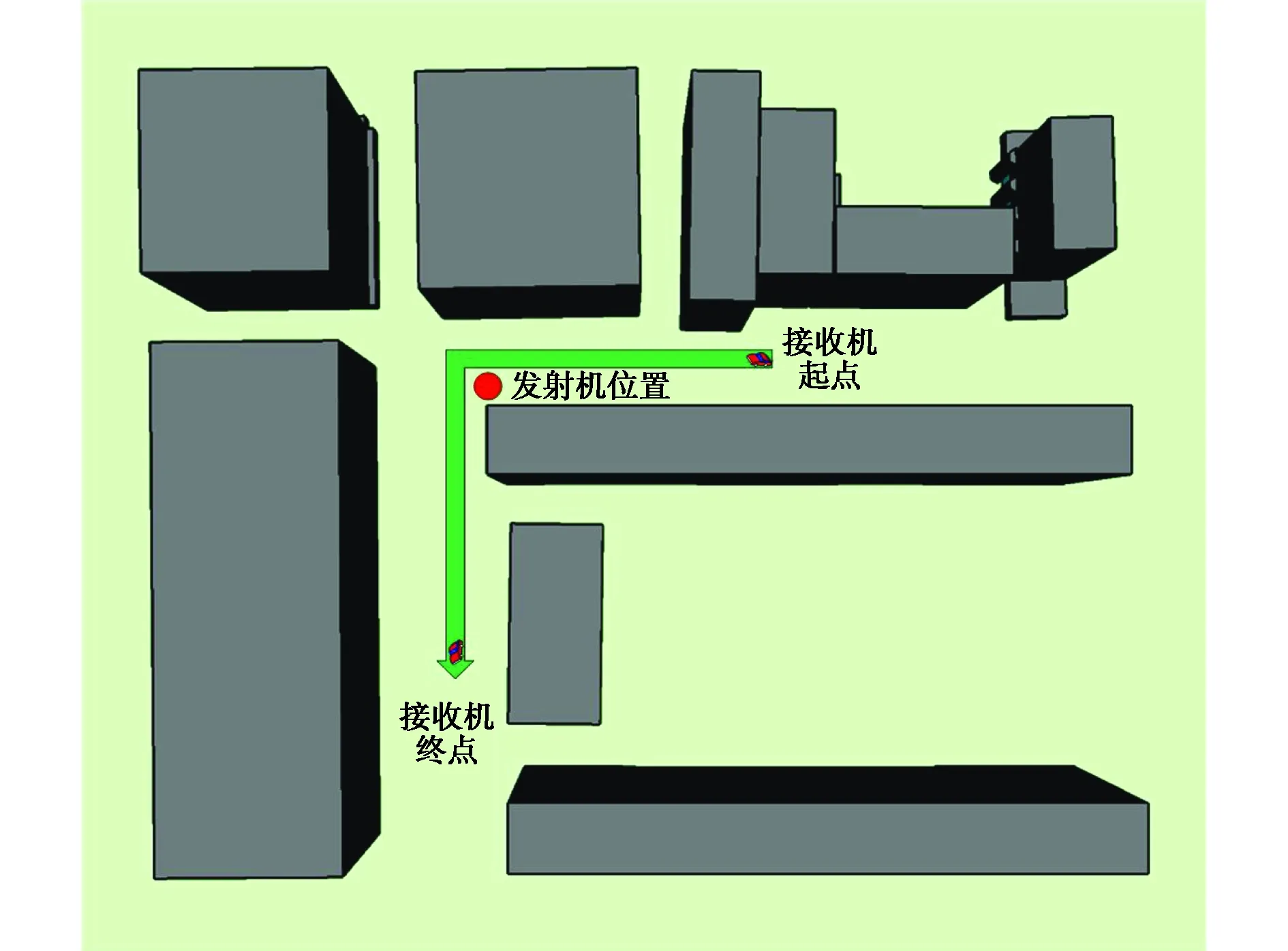
图1 仿真环境俯视图
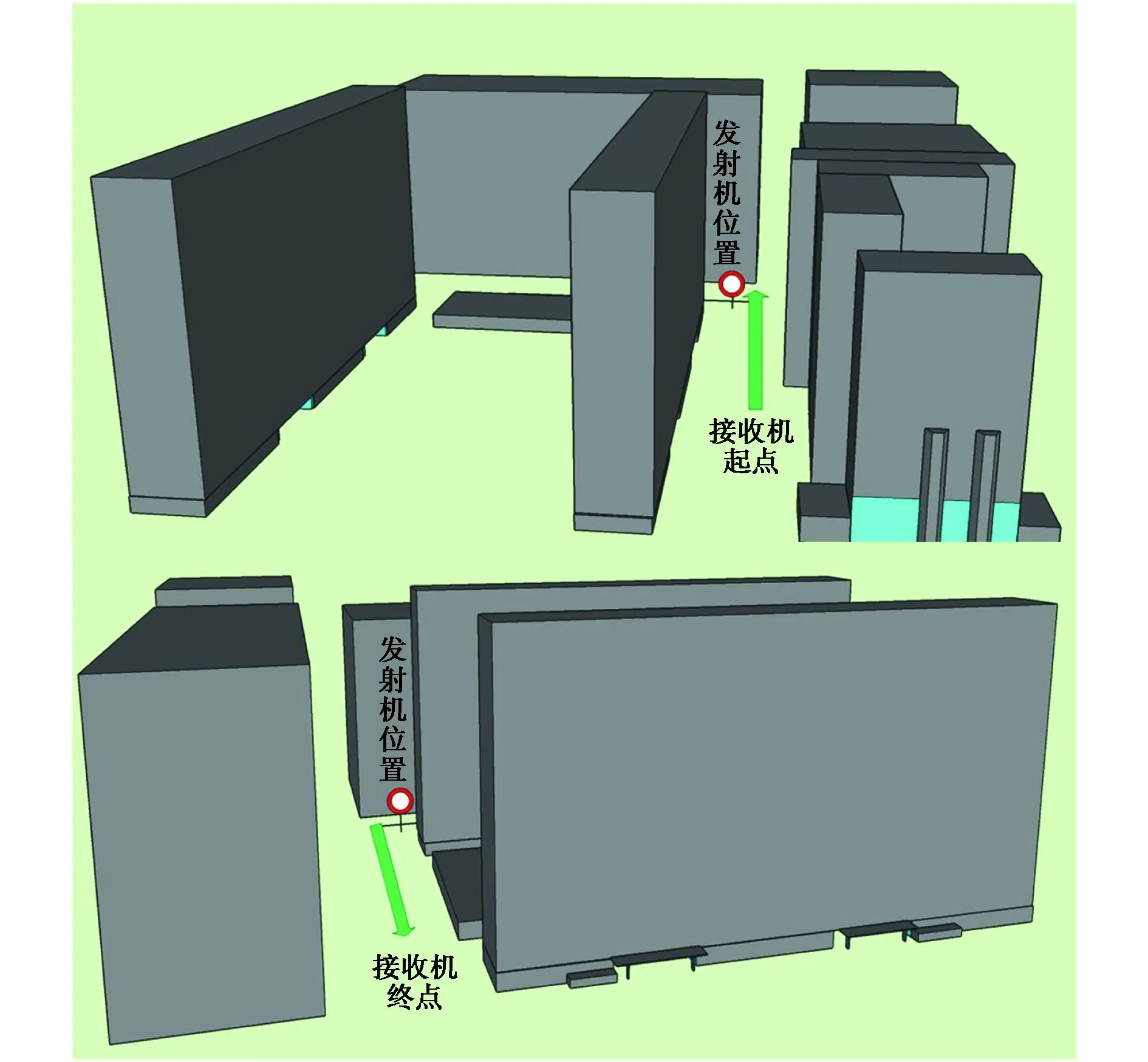
图2 仿真环境分段图
如表1所示,我们给出了仿真参数配置,射线跟踪仿真器开启了直射、二阶反射和Lambert散射,得到了大量的仿真数据,下面就对得到的仿真数据进行准平稳区间的分析.
表1 仿真参数配置
2.2 准平稳区间的计算
在仿真过程中,将接收机的移动轨迹以半波长的间隔进行采样,并未考虑两次采样的时间间隔. 因此,这种基于距离的采样方法不考虑车速的影响. 另外,在接收机移动的过程中,周围散射体和接收功率都会发生变化,造成功率间的相关性发生变化,从而准平稳区间也随移动距离而变化.因此,本部分利用上述两种算法分别计算不同门限下的准平稳区间随距离变化的大小. 其次,针对不同门限值对准平稳区间的影响,选取合适的门限值. 最后,利用选取合适的门限值对两种算法的计算结果进行比较.
2.2.1 计算结果
图3是利用CP算法计算出的不同门限下准平稳区间随行驶距离的变化曲线.由图可知,CP算法选取的门限值越大,其计算出的准平稳区间越小. 由图1还可知,汽车行驶过程可以分为对称的两段,先从起始点接近发射机,然后远离发射机到达直角拐弯处,继续行驶到达最近点后远离,直到终点. 图3中间有两段峰值区域,是汽车行驶过程中距离发射机最近的一段时刻,此时的直射功率较强,多径功率较小,总接收功率相关性较强. 当汽车距离发射机较远时(约为图中的0~80 m和120~200 m两段平滑区域),功率相关性小,准平稳区间较平滑. 凸起区域为峰值区域的两边上升和下降的区域,在此区域功率相关性逐渐增强或减弱,准平稳区间呈现先增大后减小的趋势.
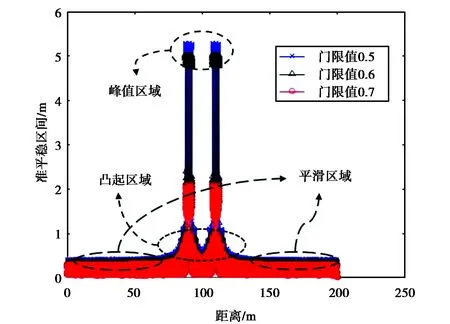
图3 CP算法不同门限值下的准平稳区间
图4为不同门限下的准平稳区间的经验累积分布函数(Cumulative Distribution Function,CDF)分布图. CDF分布可大致分为三段,对应图3中平滑区域、凸起区域和峰值区域,分别表征接收机距离发射机较远、较近和最近时准平稳区间的大小.我们选取不同门限值的CDF图中的中值进行分析,门限值为0.5、0.6和0.7时,准平稳区间中值分别为0.302 4 m、0.183 6 m和0.118 8 m,对应为波长的28倍、17倍和11倍,均小于滑动窗长度40λ.
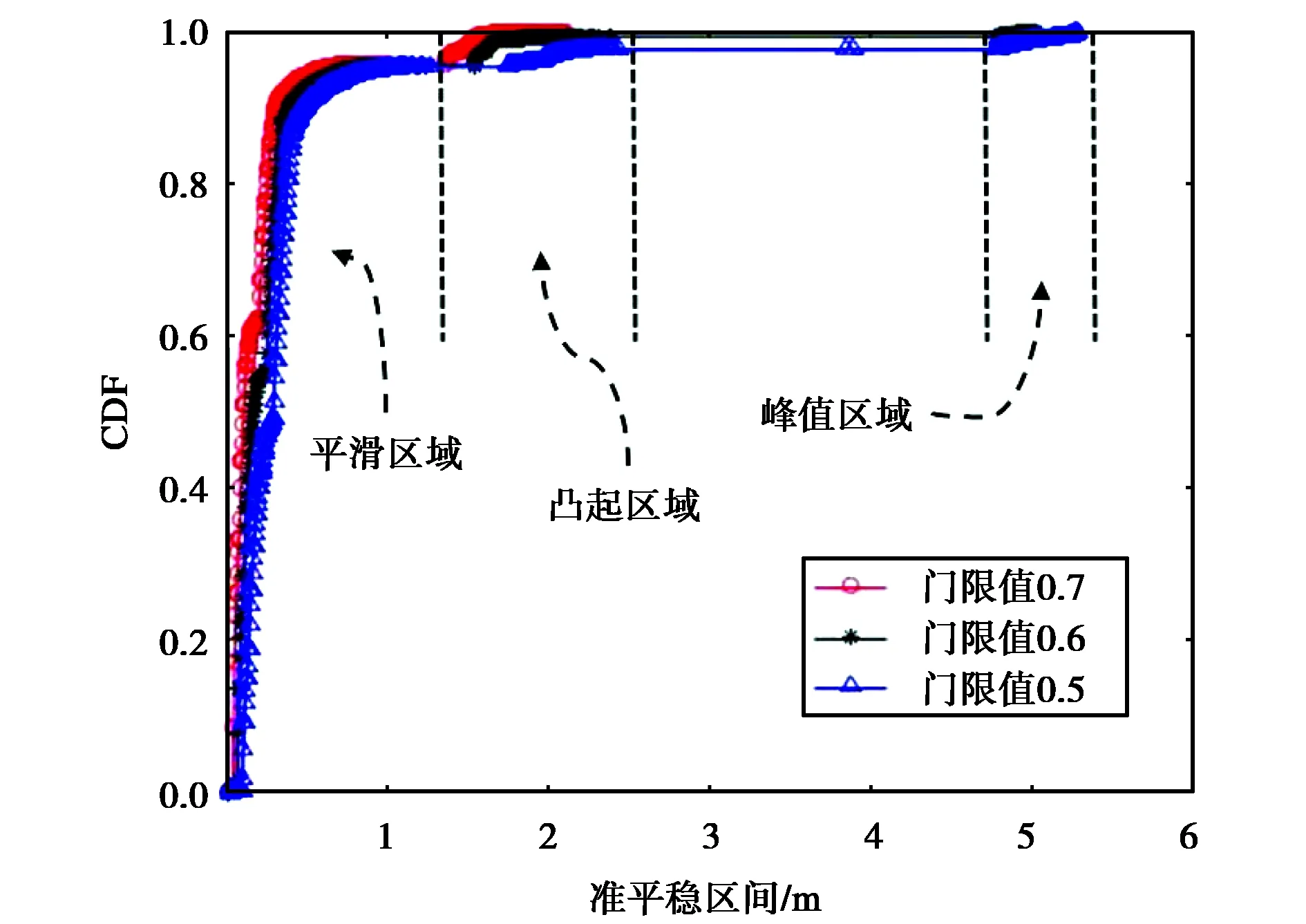
图4 CP算法不同门限值下的准平稳区间CDF分布
对于SD算法的计算结果分析类似于CP算法,如图5和图6所示,分别为SD算法计算出的准平稳区间分布和其经验CDF分布. 同样,我们选取不
同门限值的CDF图中的中值进行分析,门限值为0.1、0.2和0.3时,准平稳区间中值分别为0.010 8 m、0.113 4 m和0.394 2 m,分别为波长的2倍、10.5倍和36.5倍,均小于滑动窗长度40λ.但是从其CDF分布难以看出准平稳区间随距离的分段趋势.
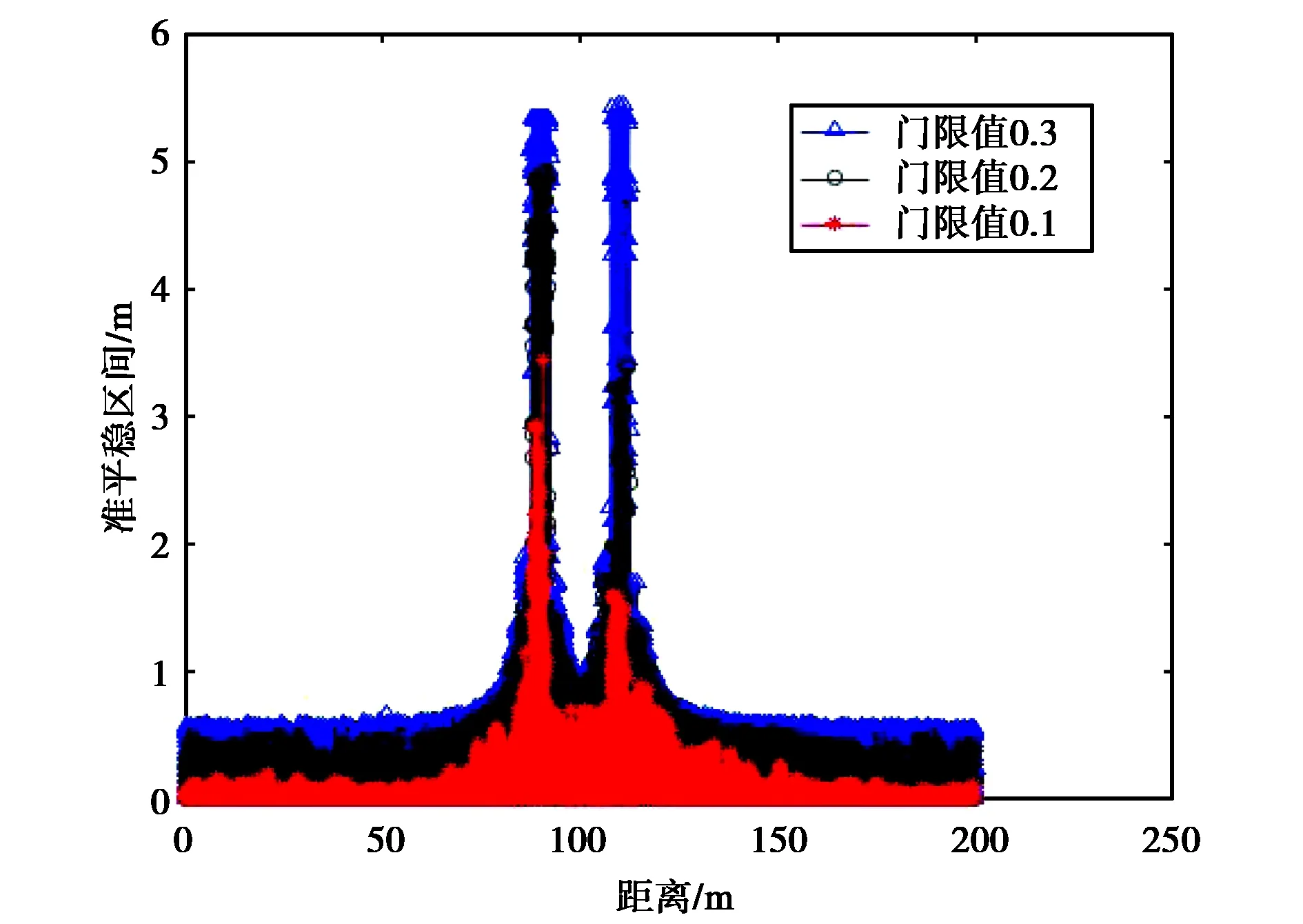
图5 SD算法不同门限值下的准平稳区间
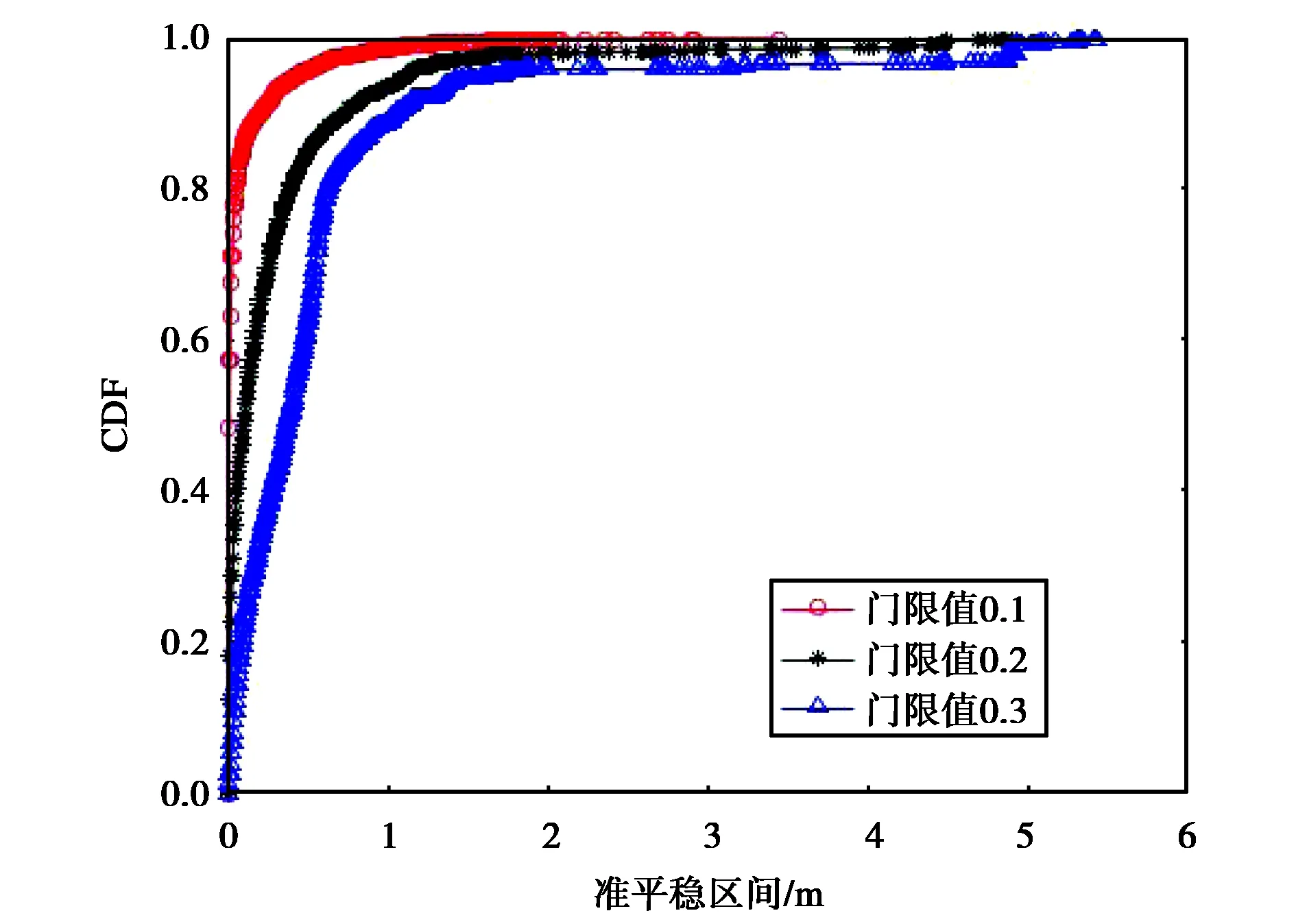
图6 SD算法不同门限值下的准平稳区间CDF分布
由于SD算法的基本思想是求散度,故我们选取了较小的判决门限,门限值越小,其准平稳区间越小. 由图5和图6可知,SD算法计算出的准平稳区间曲线较为不平滑,其CDF分布也难以分段,但与CP算法计算出的结果相似,基本能看出接收机的移动过程.
针对不同多径分量对准平稳的影响,我们将总接收功率分为两部分,一部分为直射径功率,另一部分为其他多径分量功率. 利用CP算法,我们求出了信道前100 m不同功率下的准平稳区间. 如图7所示,由于总功率受多径功率的影响,功率间的相关系数小于直射径,故总功率下的准平稳区间小于只含直射径下的准平稳区间. 由于直射径功率主要受收发信机之间的距离的影响,而多径功率主要受周围快速变化的散射体的影响,故多径功率间的相关系数较小,所以其准平稳区间较小,而且比较杂乱.
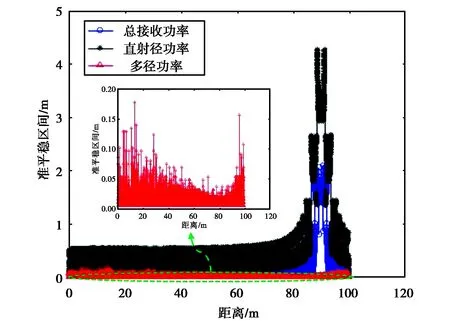
图7 不同多径分量下的准平稳区间
2.2.2 门限值的选择
研究信道的准平稳区间,门限值的选取相当重要,文献[19]采用目视的方法选取合适的门限. 由于两段行驶过程具有对称性,我们选取了仿真场景的前100 m分析门限值对准平稳区间判决的影响.如图8所示,SD算法随门限值的上升准平稳区间变大,而CP算法则变小. 对于SD算法而言,当门限值为0时,准平稳区间即为采样间隔,故其门限下界不能过小. 对于CP算法而言,当门限值为1时,准平稳区间即为采样间隔,故其门限上界不能过大.
仿真过程中,我们使用长度为40λ的滑动窗平均,另外,信道参数在10λ~40λ不会发生大的变化[23],故我们截取了介于此段区间下的门限值作为合适可取的门限值,SD算法合适的门限值范围为0.09~0.26,CP算法合适的门限值范围为0.51~0.94.
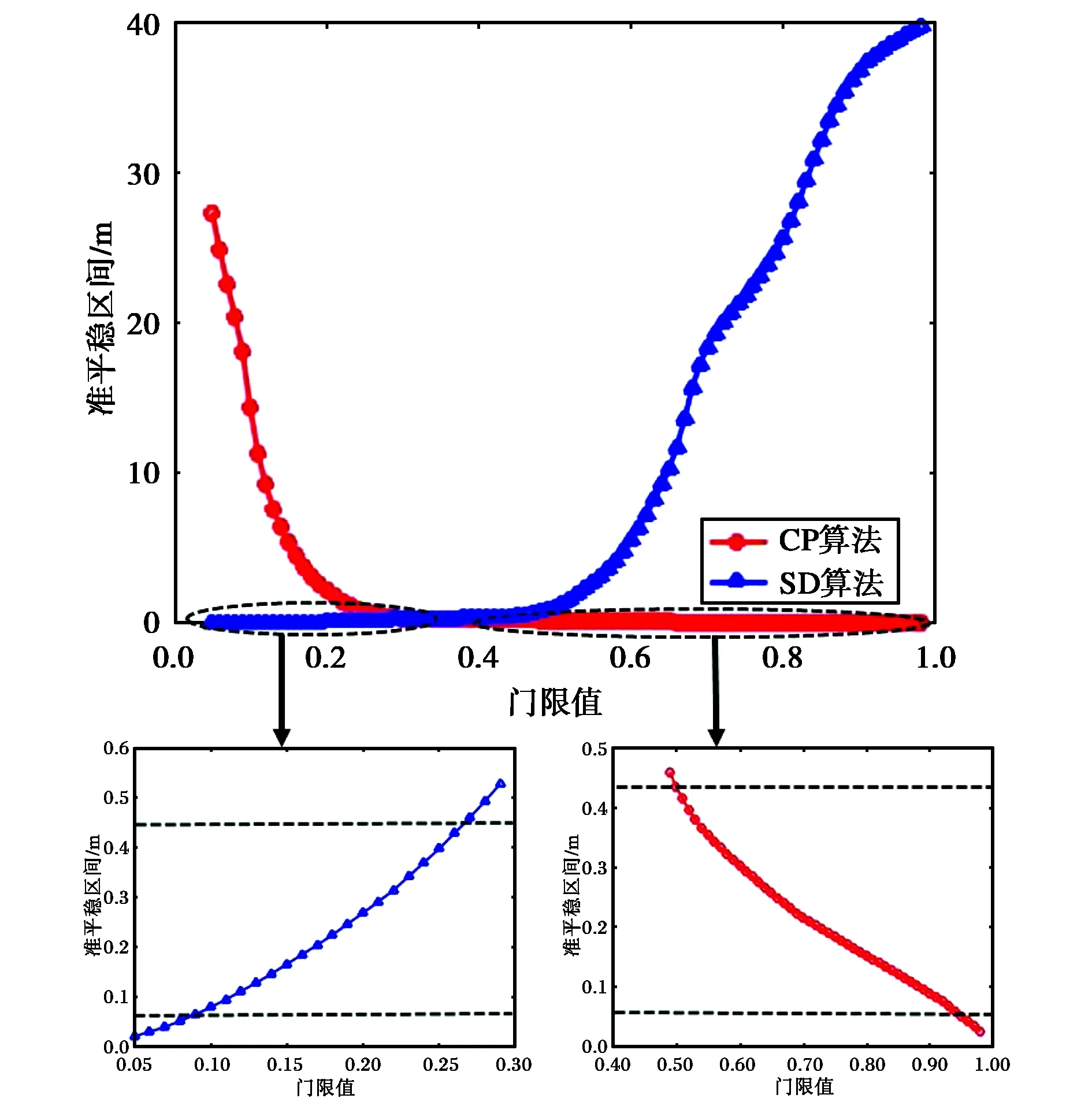
图8 门限值对两种算法判决的影响
2.2.3 CP算法和SD算法的对比
结合2.2.2节给出的门限值合理范围,我们选取两种算法准平稳区间中值比较接近的门限值进行结果对比. 如图9和图10所示,SD算法为0.2,对应中值为0.113 4 m,CP算法为0.6,对应中值为0.183 6 m.
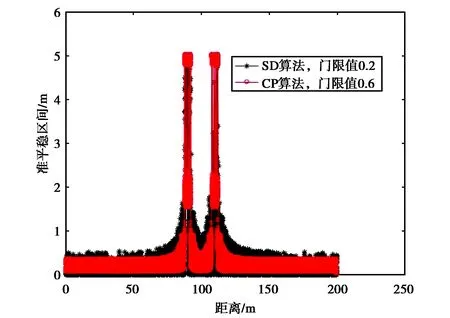
图9 SD算法和CP算法准平稳判决比较
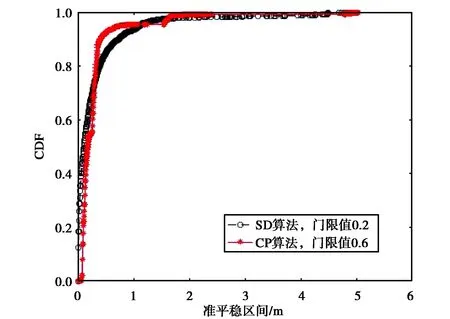
图10 SD算法和CP算法准平稳判决比较的CDF分布
由图9可知,CP算法计算出的准平稳区间更平滑,而SD算法则在第二个峰值区域出现失真. CP算法的CDF分布更能反应真实场景的变化. 另外CP算法复杂度低,我们利用SD算法计算出该场景准平稳区间的时间约为6 514 s,而CP算法的计算时间约为1 457 s,CP算法的运算速度是SD算法的4.47倍. 综合算法的计算复杂度和精度,CP算法更适合此场景下准平稳区间的计算.
3 信道准平稳区间应用
求得准平稳区间以后,如何利用准平稳区间解决实际问题的研究较少. 本文从信道准平稳区间的物理意义出发,即信道特性在此区间内不发生大的变化. 因此,利用准平稳区间作为采样间隔(远大于半波长),代替之前半波长的采样间隔,从而减少了仿真的采样点数. 通过对比半波长采样和利用准平稳区间采样下的信道参数的一致性,在误差合理的范围内,可以加速射线跟踪仿真器的运算速度.
3.1 应用仿真实验
结合第2节的分析,本节选取CP算法门限值为0.6时求得的准平稳区间进行分析,分别利用CDF分布不同概率下的准平稳区间作为新的采样间隔,具体仿真实验配置如表2所示. 利用表中的准平稳区间作为新的采样间隔,实验序号1和2使用的采样间隔分别为17λ和40λ,而实验序号3用的是该门限值下的最大准平稳区间. 利用得到的数据与原半波长采样的信道特性进行对比.
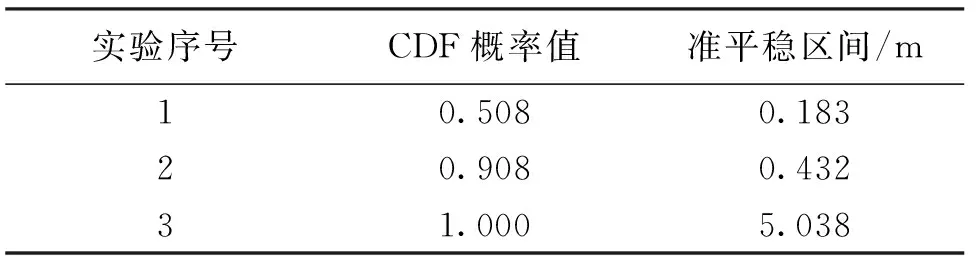
表2 应用仿真实验配置
3.2 结果分析
我们计算了信道重要的大尺度参数之一:莱斯K因子. 如图11所示,其CDF表示了该场景下直射分量与多径分量的占比情况.从图中可以看出概率为0.7时,其值为0,表示直射径功率与多径功率相同. 由图可知,实验序号1、2和原始采样拟合较好,而序号3基本能反映其分布趋势,但拟合结果较差. 所以,为了保证信道大尺度参数莱斯K因子的精度,建议取CDF概率值为90.82%以下的准平稳区间作为重采样间隔.
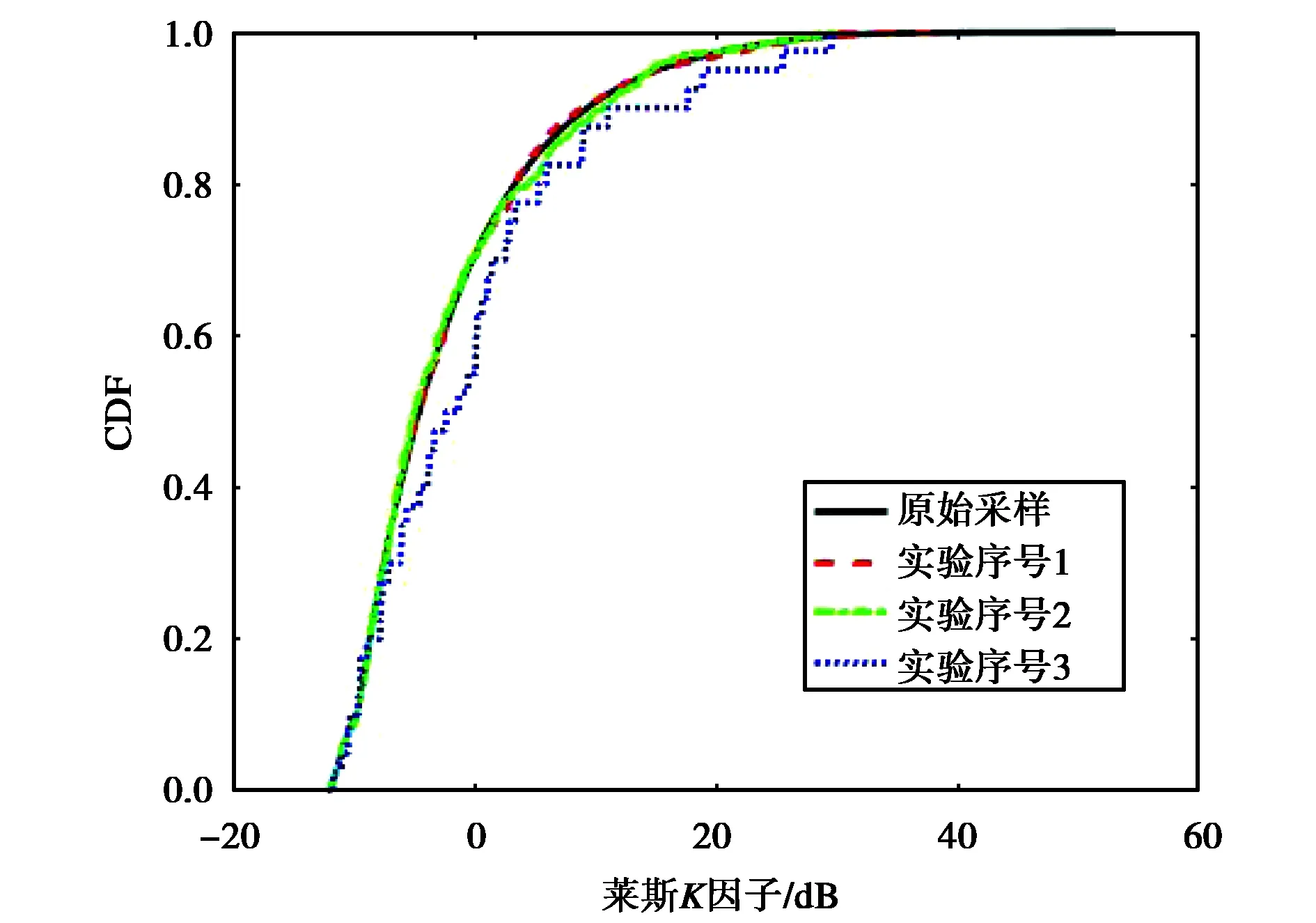
图11 莱斯K因子CDF分布
对于信道的小尺度参数之一:均方根时延扩展,用相同的实验配置进行仿真,结果如图12所示.
图12 均方根时延扩展CDF分布
由图12可知:实验序号1拟合效果最好,包括中值和最大值都更接近原始采样;而实验序号2的中值基本符合,但最大值与原始采样相差30 ns;实验序号3基本中值和最大值均不能很好地拟合. 所以,为了保证信道小尺度参数均方根时延扩展的精度,建议取CDF概率值为50.82%以下的准平稳区间作为重采样间隔.
3.3 实验结论
从以上分析可知,在一定的概率值下,准平稳区间既能保证信道大尺度参数(如莱斯K因子)的平稳性,也能描述信道小尺度参数(如均方根时延扩展)的平稳性. 另外,在未来的研究中可以利用准平稳区间的判决结果,将信道划分为大尺度参数扇区和小尺度参数扇区,在扇区内,信道参数不重复计算,从而提高仿真器的运算速度.
4 结 论
本文针对28 GHz车联网毫米波信道进行了准平稳区间的理论分析,仿真计算和应用验证. 给出了合适门限值的选择范围,CP算法为0.51~0.94,SD算法为0.09~0.26. 通过准平稳区间的结果,若取建议概率值50.82%以下的准平稳区间作为重采样间隔,可将射线跟踪仿真器的仿真速度至少提高34倍. 下一步就将从准平稳区间的应用继续研究,用更多场景采集数据,通过机器学习等先进方法,确保信道准平稳区间可以用在实际的信道测量系统和场景中,并服务于上层系统级仿真和设计.
[1] MONSERRAT J F, MANGE G, BRAUN V, et al. METIS research advances towards the 5G mobile and wireless system definition[J]. Eurasip journal on wireless communications & networking, 2015(1):53.
[2] RAPPAPORT T S, SUN S, MAYZUS R, et al. Millimeter wave mobile communications for 5G cellular: it will work![J]. IEEE access, 2013, 1(1):335-349.
[3] AL-OGAILI F, SHUBAIR R M. Millimeter-wave mobile communications for 5G: challenges and opportunities[C]//IEEE International Symposium on Antennas and Propagation. Fajardo: IEEE, June 26-July 1, 2016.
[4] ANDREWS J G, BUZZI S, WAN C, et al. What will 5G be?[J]. IEEE journal on selected areas in communications, 2014, 32(6):1065-1082.
[5] YANG B, YU Z, DONG Y, et al. Compact tapered slot antenna array for 5G millimeter-wave massive MIMO systems[J]. IEEE transactions on antennas & propagation, 2017, PP(99):1.
[6] LEE J. 5G trial in 2018 Pyeong Chang winter Olympics-technical challenges & preparations[C]//International Symposium on Antennas and Propagation. Okinawa:IEEE, October 24-28, 2017.
[7] SAMIMI M, WANG K, AZAR Y, et al. 28 GHz angle of arrival and angle of departure analysis for outdoor cellular communications using steerable beam antennas in New York city[C]//Vehicular Technology Conference. Dresden: IEEE, June 2-5,2013:1-6.
[8] AZAR Y, WONG G N, WANG K, et al. 28 GHz propagation measurements for outdoor cellular communications using steerable beam antennas in New York city[C]//IEEE International Conference on Communications. Budapest: IEEE, June 9-13, 2013: 5143-5147.
[9] DENG S, SAMIMI M K, RAPPAPORT T S. 28 GHz and 73 GHz millimeter-wave indoor propagation measurements and path loss models[C]//IEEE International Conference on Communication Workshop. London: IEEE, June 8-12, 2015: 1244-1250.
[10] GUAN K, AI B, NICOLAS M L, et al. On the influence of scattering from traffic signs in vehicle-to-X communications[J]. IEEE transactions on vehicular technology, 2016, 65(8):5835-5849.
[11] RENAUDIN O, KOLMONEN V M, VAINIKAINEN P, et al. Non-Stationary narrowband MIMO inter-vehicle channel characterization in the 5-GHz band[J]. IEEE transactions on vehicular technology, 2010, 59(4):2007-2015.
[12] YANG C F, WU B C, KO C J. A ray-tracing method for modeling indoor wave propagation and penetration[J]. IEEE transactions on antennas &propagation, 1998, 46(6):907-919.
[13] YANG J, AI B, GUAN K, et al. Quasi-stationarity regions analysis for channel in composite high-speed railway scenario[C]//IEEE International Symposium on Antennas and Propagation. Fajardo: IEEE, June 26-July 1, 2016:1699-1700.
[14] HE R, RENAUDIN O, KOLMONEN V M, et al. Characterization of quasi-stationarity regions for vehicle-to-vehicle radio channels[J]. IEEE transactions on antennas & propagation, 2015, 63(5):2237-2251.
[15] PAIER A, ZEMNE T, BERNADO L, et al. Non-WSSUS vehicular channel characterization in highway and urban scenarios at 5.2GHz using the local scattering function[C]//International ITG Workshop on Smart Antennas. Vienna: IEEE, February 26-27, 2008:9-15.
[16] BERNADO L, ZEMEN T, PAIER A, et al. Non-WSSUS vehicular channel characterization at 5.2 GHz-spectral divergence and time-variant coherence parameters[C]//XXIX General Assembly of the International Union of Radio Science, 2008.
[17] HERDIN M, CZINK N, OZCELIK H, et al. Correlation matrix distance, a meaningful measure for evaluation of non-stationary MIMO channels[C]//Vehicular Technology Conference, 2005. Stockholm, May 30-June 1, 2005:136-140.
[18] CHEN B, ZHONG Z, AI B. Non-stationary channel characteristics in high-speed railway[C]//IEEE International Symposium on Antennas and Propagation &Usnc/ursi National Radio Science Meeting. Vancouver: IEEE, July 19-24, 2015: 97-98.
[19] GEORGIOU T T. Distances and riemannian metrics for spectral density functions[J]. IEEE transactions on signal processing, 2007, 55(8):3995-4003.
[20] GUDMUNDSON M. Correlation model for shadow fading in mobile radio systems[J]. Electronics letters, 2011, 27(23):2145-2146.
[21] GEHRING A, STEINBAUER M, GASPARD I, et al. Empirical channel stationarity in urban environments[C]//Proceeding of the European Personal Mobile Communications Conference. (EPMCC’01). Vienna, Austria, 2001:1-6.
[22] MACCARTNEY G R, RAPPAPORT T S, SAMIMI M K, et al. Millimeter-wave omnidirectional path loss data for small cell 5G channel modeling[J]. IEEE access, 2015, 3:1573-1580.
