一种联合利用方位多路径的TMA方法
2018-01-16葛轶洲
孙 伟 ,葛轶洲 ,周 青
(1.通信信息控制和安全技术重点实验室,浙江 嘉兴 314033;2.中国电子科技集团公司第三十六研究所,浙江 嘉兴 314033)
0 引言
目标运动分析(TMA)是一种得到广泛应用的被动目标定位方法,最常用的方法包括单基阵纯方位 TMA 方法[1]和基于方位 /频率的 TMA 方法[2]。单基阵纯方位TMA方法,必须借助于基阵平台机动才能够实现目标运动状态参数的观测,且收敛时间较长,这对拖曳长线列阵和固定布放的大孔径基阵极为不利,限制了其应用范围。基于方位/频率的TMA方法有效提高了目标运动参数的可观测性,但海洋信道中目标线谱成分的稳定性较差,且目标运动带来的多普勒常被海洋信道引起的干涉特性所掩盖,难以准确提取,制约着该方法的实际应用。目前,随着一体化声纳概念的出现,联合利用多基阵信息的被动定位方法得到了发展,如多基阵纯方位TMA方法,无需基阵平台的机动即可实现目标的可观测性。
近年来,低频大孔径基阵已成为未来声纳发展的主要趋势之一,如低频大孔径的拖曳式线列阵和固定布放的线列阵,这为利用多基阵TMA方法实现被动目标定位提供了条件。为了更好地提高TMA方法的收敛速度和估计精度,除了增大基阵孔径外,还有就是增加观测信息。在大量的水声实验中发现目标辐射的宽带谱呈现明显的多途干涉现象[3],且干涉条纹比较稳定。不同的目标运动态势所对应的干涉谱也不同,所以干涉条纹中蕴含着目标的运动信息。本文把大孔径基阵划分为两个子阵,提出了一种基于方位/多路径信息的双子阵TMA方法,并与双子阵纯方位TMA方法的性能进行了仿真比较。
1 多路径信息的提取

图1 多路径传播示意图
如图1所示,在简正波模型下,若假设声源的频率为ω,声源深度为zs,则与声源距离为r,深度为zr的接收点处声压和声强可以分别表示为:

其中,km为m号简正波的水平波数,ψm为相应的模式特征函数,。式(2)中的第1项是距离r和频率ω的缓变项,第2项由于各号简正模态之间发生干涉产生波动,在距离-频率平面内呈现出明暗相间的干涉条纹。其中亮条纹对应于声强在该处取得最大值,因此,有dI=0,将dI表示为距离r和频率ω的全微分,则有:

经过近似可得式(6),其中u,v为模式相速度和群速度的均值。

以上给出的简正波模型下的波导不变量定义式。通常在小掠射角下,波导不变量近似等于1。则式(6)又可写为:

以上表达式可以认为是目标运动状态与频率变化的确定性关系,且可以通过LOFAR谱图中的干涉亮条纹得到。
现有的干涉条纹提取方法主要是通过曲线拟合。根据以上给出的关系式,通过坐标变换可以得到一个近似的表达式:

其中,c1、c2、c3与目标运动速度,初始位置等参数有关,对于作匀速直线运动的目标而言,这些都是未知常数。所以根据以上表达式可知,其在LOFAR图应呈现出双曲线变化规律。进一步将其展开,可将ωi2(t)写为:

其中,a、b、c也为未知常数。它是一个多项式,所以可以用多项式最小二乘方法对其未知参数进行估计。

得到了a、b、c 3个参数,也就有了ωi(t)的具体表达式,可以得到ω˙i(t)的表达式,最终可以得到r˙/r的表达式。
2 修正极坐标系下的扩展卡尔曼滤波算法

图2 双子阵定位示意图
图2所示将长线阵L等分成两个子阵,并以两子阵的阵中心(-3L/4,0)和(-L/4,0)作为参考位置,右侧端点阵元作为原点。
文献[4-5]指出,在TMA中,用直角坐标系构造的扩展卡尔曼滤波器具有不稳定的缺点,而用改进极坐标系构造的扩展卡尔曼滤波器既是稳定的又是渐近无偏的。
若令目标的状态估计量为

则状态方程为:
测量方程为:

根据以上测量信息给出极坐标系下扩展Kalman滤波算法流程为:
①初始化:给定目标状态初始值及初始估计方差。
②预测:

其中,

③滤波增益:

④状态估计:

⑤协方差估计:

以上给出的利用双子阵方位及多路径信息在极坐标系下的扩展卡尔曼滤波算法流程。
3 算法仿真及分析
目标运动参数设定:假设目标做匀速直线运动,初始位置为(2 000 m,4 000 m),速度为(-10 m/s,5 m/s)。阵元个数为201,阵元间距为0.5 m。辐射噪声为高斯白噪声,带宽为200 Hz~400 Hz。信噪比为20 dB。
波导参数:本文波导模型为经典的Pekeris波导,由一个等声速的海水层和一个等速的海底半空间构成。水深为100m,声源及水听器深度为20m。底质密度为1.83 g/cm3,底质声速为1 560 m/s,底层介质中的衰减系数为0.02。波导示意图如图3所示。

图3 Pekeris波导示意图
通过对阵数据作常规波束形成,并用抛物线插值法进行方位精测。最后用最小二乘法平滑测量噪声。得到两子阵的方位历程图。如图4所示。

图4 两子阵方位历程图
用Kraken模型仿真得到两子阵的LOFAR谱图,如图5、图6所示:

图5 左子阵LOFAR图

图6 右子阵LOFAR图
根据以上LOFAR谱图应用最小二乘方法得到两子阵的归一化径向速度信息。如图7所示。
比较利用不同信息组合所估计的目标运动参数,其收敛轨迹和目标航迹如下页图8所示。图中比较了双子阵基于方位/多路径信息在直角坐标系下和修正极坐标系下的参数估计结果。从图示结果中可以得出结论:增加多路径信息能加快参数收敛速度,提高参数估计性能。且在修正极坐标系下的EKF算法,其性能优于直角坐标系下的EKF算法。

图8 两种坐标系下参数航迹估计比较
图9给出了3种TMA方法估计的距离均方根误差(RMSE)及其相应的CRLB比较。可以看到,双子阵方位多路径TMA的均方根误差和CRLB均较双子阵纯方位TMA方法的有所改善,且在修正极坐标系下,其估计性能显著提高。随着数据长度的增加,3种TMA方法的距离均方根误差逐渐逼近其CRLB。
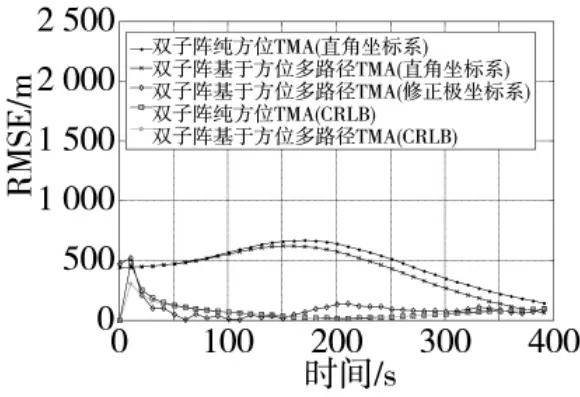
图9 3种TMA方法RMSE比较
4 结论
本文提出了一种修正极坐标系下联合利用方位/多路径信息的双子阵TMA方法,同时给出了多路径信息的提取方法以及此算法的具体流程。仿真结果表明,该方法的估计性能要优于双子阵纯方位TMA方法和直角坐标系下基于方位/多路径信息的双子阵TMA方法。此方法可以快速提高目标运动参数的收敛速度和估计精度,有很高的工程应用价值。
[1]AIDALA V J,HAMMEL S E.Utilization of modified polar coordinates for bearings-only tracking[J].IEEE Transaction on Automatic Control,1983(28):283-294.
[2]SONG T L,SPEYER J L.A stochastic analysis of a modified gain extended kalman filter with applications to estimation with bearings only measurements[J].IEEE Transactions on Automatic Control,1985(10):940-949.
[3]LIANG A.Calculating the waveguide invariant by passive sonar lofargram image[J].IEEE Transactions on Signal Processing,2007(3):13-17.
[4]LANEUVILLE D,JAUFFRET C.Recursive bearings-only TMA via unscented kalman filter:cartesian Vs.modified polar coordinates[J].IEEE AC ,2007(5):1108-1114.
[5]NARDONE S C,LINDGREN A G,GONG K F.Fundamental properties and performance of conventional bearings-only target motion analysis [J].IEEE Trans AC,1984(29):775-787.