某纯电动微卡滑行阻力异常分析与改进
2018-01-09刘雪冰李文杰
刘雪冰,李文杰
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
某纯电动微卡滑行阻力异常分析与改进
刘雪冰,李文杰
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
对某纯电动微卡进行滑行阻力分析,确定滑行阻力异常的原因,并针对该原因提出电机控制软件优化的方案,进一步利用电机台架试验验证该方案的可行性,最后的整车滑行试验结果表明优化方案有效,改善了整车性能。
滑行试验;受力分析;电磁转矩;软件优化
引言
在纯电动汽车开发阶段,多数是用试验室试验代替道路试验,底盘测功机是整车进行性能检测的主要设备,用转毂代替路面,通过功率加载装置给转毂施加负载,模拟整车在道路上行驶的阻力[1,2]。而完成整车动力性、经济性等室内试验的首要条件,就是在转毂台架上正确模拟出车辆道路行驶阻力,道路行驶阻力的模拟精度将直接影响整车性能试验结果的准确度。目前,国内很多车企都选择采用滑行试验测算整车的行驶阻力,并应用到转毂台架进行动力性、经济性的试验,同时滑行阻力测定完成后还可以结合相关仿真软件,更为准确的分析动力性经济性的优化方案。
1 问题现状
某纯电动微卡设计最高车速为80km/h,在定远试验场平坦路段做滑行阻力试验时,出现滑行阻力异常现象,如图 1所示,速度大于 40km/h后,阻力较小,出现阻力凹陷,滑行阻力数据如表1所示。

表1 某纯电动微卡滑行阻力数据(改进前)
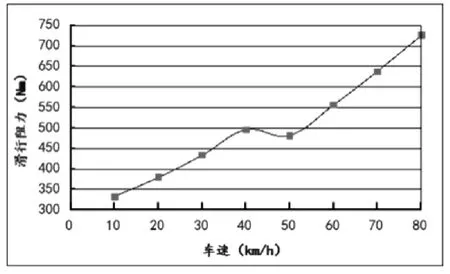
图1 某纯电动微卡滑行阻力曲线(改进前)
2 阻力异常原因分析
2.1 试验工况
根据标准GB/T 12536-1990《汽车滑行试验方法》和GB/T 18385-2005《电动汽车动力性能试验方法》中的要求进行电动汽车道路试验[3]。
标准中要求试验在清洁、干燥、平坦、用混凝土或沥青铺成的直线道路上进行,道路宽度大于 8m,纵向坡度不大于0.1%,风速不大于3m/s,气温在5℃~32℃之间,相对湿度不大于95%[4]。以车载GPS及数据采集器测量记录车速、距离及时间。表2为实际试验时的试验条件。

表2 滑行试验条件
试验条件满足标准要求,试验测试设备在检定有效期内,左右轮胎气压正常,基本排除外因导致滑行阻力异常。
2.2 整车滑行受力分析
汽车在路面上行驶时,根据动力学的平衡关系建立汽车行驶平衡方程式为[5]:

式(1)中:Ft为整车驱动力,Ff为滚动阻力,Fw为空气阻力,Fi为坡度阻力,
车辆在平直干燥路面上空档滑行时,坡道阻力为0N,理论上整车驱动力为0N,整车的滑行阻力即为滚动阻力和空气阻力之和。
纯电动汽车的车辆驱动力完全来自于电机的扭矩输出,而电机的扭矩输出主要依赖于整车控制器扭矩指令和电机控制器的控制。通过观察表1中该款纯电动微卡的滑行数据,可见在 50km/h及以上车速时,滑行阻力出现异常,而电机控制器软件中设定:在司机松掉油门进入滑行状态后(整车控制器的扭矩指令为0Nm),电机控制器的功率模块(IGBT)停止运行的电机转速为 3800rpm,3800rpm按照整车主减速比4.875、减速器减速比1.98及轮胎半径0.297m换算对应车速为45km/h,推测电机控制器IGBT运行后电机输出扭矩不为0Nm。
设定滑行阻力方向为正方向,则电机驱动力方向为负方向。当电机输出扭矩为0Nm时,整车滑行阻力仅滚动阻力和空气阻力,即式(2):

当电机输出扭矩非0 Nm时,则整车的滑行阻力如式(3):

令式(3)与式(2)相减,得式(4):

Fzu2为考虑电机控制器 IGBT运行后电机存在驱动力的滑行阻力,Fzu1为未考虑电机控制器 IGBT运行后电机存在驱动力的滑行阻力,从式(4)可见,若电机控制器IGBT运行后若电机输出驱动力,会导致滑行阻力偏小,出现阻力拐点。
为了进一步验证以上判断,对电机系统进行台架对拖试验,由原动机带动电机从0rpm至最高车速7200rpm空载运行,观察电机控制器直流测电流,可见从3800rpm电机控制器IGBT运行后,电机控制器直流侧电流从0A升至2A,说明电机此时并非完全空载,存在功率输出,从而导致电机轴上有扭矩输出,如图2、图3所示。
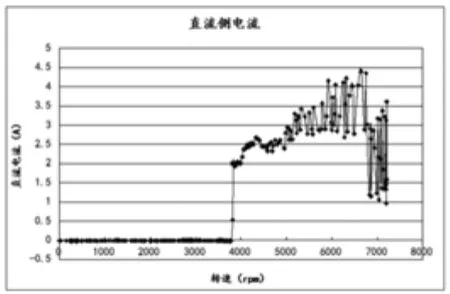
图2 电机控制器直流侧电流(改进前)

图3 电机轴上输出扭矩(改进前)
3 电机控制软件优化

图4 电机控制软件框图
如图4所示,在电动汽车整车环境中,电机控制器与整车控制器通过 CAN通讯交互,整车滑行时,司机挂空档,整车控制器下发给电机控制器的扭矩指令为0Nm,电机控制器通过解析模块获取控制目标扭矩0Nm,调节电压逐渐达到目标扭矩值,电机电磁转矩公式[6,7]如式(5):

观察电机电磁转矩公式(5),可知在整车需求扭矩为0Nm时,存在以下两种情况会造成扭矩非0 Nm:
● 电机转子位置存在误差,造成iq给定(即图4中iq*)虽然为0A,但是电机控制的真实iq(即图4中iq)不为0A,导致输出转矩非0Nm。
● iq给定(即图4中iq*)不为0A,造成转矩非0Nm。
对于第一种情况,重新对电机的初始位置进行辨识,标定电机旋变位置,标定之前为2445,重新标定后初始位置为2465,电机的转子位置偏差5.5%,并对电机控制软件中的变量进行相应修正。
对于第二种情况,电机控制器IGBT运行后,将电机控制的iq给定电流(图4中的iq*)通过CAN通讯上传至上位机界面,实际观察iq给定(即图4中iq*)确实存在一定小电流,进一步对电机控制软件中各转速下的零扭矩iq给定电流(即图4中iq*)设定为0A,即iq*n(T=0)= 0A(n=200rpm,400rpm……7200rpm),T代表扭矩。
4 试验验证
电机控制软件优化后,再次对电驱动系统进行台架测试,由原动机带动被测试电机转动,上位机给定扭矩为0Nm,对比软件优化前后输出扭矩和直流侧电流大小如图4和图5所示。
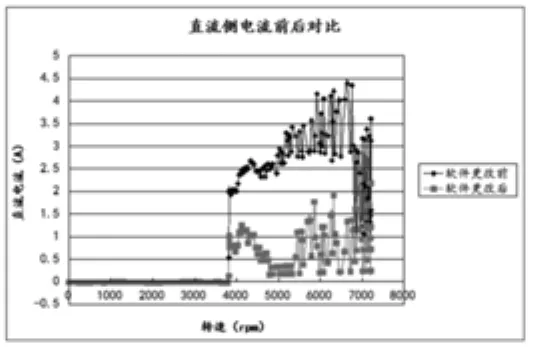
图4 软件优化前后电机控制器直流侧电流对比

图5 软件优化前后电机轴上输出扭矩对比
通过对比以上两图可见,对电机控制器的软件优化后,0Nm要求扭矩下,电机控制器输出扭矩控制在1Nm偏差范围内,而软件优化之前,0Nm的扭矩偏差最高超过2.5Nm,充分说明了电机软件优化的有效性。
进一步按照标准对整车进行滑行试验,实测整车的滑行阻力如表3所示。
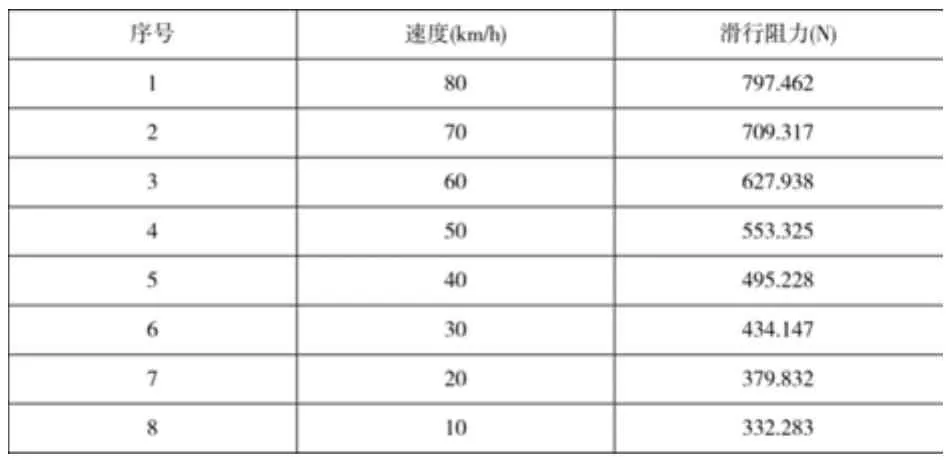
表3 某纯电动微卡滑行阻力数据(改进后)

图6 某纯电动微卡滑行阻力曲线(改进后)
从图6可见,整个速度段滑行阻力曲线平滑,无拐点出现,有利于整车转毂试验。
5 结论
通过对某电动微卡的平路滑行进行受力分析,及对电机驱动系统进行台架试验,确定了滑行阻力异常的原因,根据电机控制原理对电机控制软件进行两方面优化,通过电机系统台架试验和整车滑行试验验证,改善了整车滑行阻力异常的问题。
[1] 朱伟伟,陈刚.基于滑行试验的载货汽车动力性经济性仿真与试验分析[J].汽车科技,2015,4:20-24.
[2] 王佳,杨建中,蔡志标,等.基于模糊控制的纯电动轿车整车优化控制策略[J].汽车工程,2009,31(4):362-365.
[3] 周荣宽,韩晓东,韩宗奇等.基于道路试验的电动汽车滑行阻力系数分析[J].汽车技术,2015,4:52-55.
[4] 王德伦,周荣宽.ISG轻度混合动力电动汽车控制策略的制定及仿真[J].重庆理工大学学报(自然科学).2013.27(6):5-9.
[5] 董劲松,许洪国,任有等.基于道路试验的汽车滚动阻力和空气阻力系数计算方法研究[J].交通信息与安全,2009,1(27):75-78.
[6] R.Krishnan,柴凤等译.永磁无刷电机及其驱动技术[M].北京:机械工业出版社,2012:227-231.
[7] 王成元,夏家宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2009:104-105.
Analysis and Improvement of Sliding Resistance of a Pure Electric Micro Card
Liu Xuebing, Li Wenjie
( Anhui Jianghuai Automobile Group Co., Ltd., Anhui Hefei 230601 )
By analyzing the sliding resistance of a pure electric micro card, this paper determines the cause of the abnormal sliding resistance.And a optimization scheme of the motor control software is proposed for this reason.The motor bench test is used to verify the feasibility of the scheme.The final vehicle sliding test results show that the optimization program is effective and improve the performance.
Sliding test; Force analysis; Electromagnetic torque; Software optimization
CLC NO.: U469.7 Document Code: A Article ID: 1671-7988 (2017)12-160-03
U469.7 文献标识码:A 文章编号:1671-7988 (2017)12-160-03
10.16638/j.cnki.1671-7988.2017.12.053
刘雪冰(1988- ),电驱动工程师,就职于安徽江淮汽车集团股份有限公司技术中心。