基于UG的双前桥转向系统运动仿真分析
2018-01-09李静彭怀辉
李静,彭怀辉
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
基于UG的双前桥转向系统运动仿真分析
李静,彭怀辉
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
文章介绍了一种双前桥转向系统的分析优化方法。通过UG的运动仿真模块对双前桥转向系统进行运动仿真,以第一前桥的一个转角输入,求解第一、二前桥其它转角,然后再与阿克曼公式得出转角进行对比。从而分析第一、二前桥转向梯形以及双前桥拉杆系的合理性,为双前桥转向系统的优化设计提供依据。
双前桥转向系统;运动仿真;对比分析
引言
汽车的转向轻便性和操纵稳定性是设计汽车时要考虑的重要性能,其中转向系统是影响此性能的关键因素。转向梯形的设计是转向系统设计的重要内容之一,转向梯形选择的好坏, 直接影响转向系统的性能、轮胎的磨损等[1]。
转向梯形设计目前采用的主要方法有作图法、解析法和计算机程序辅助分析法等。 这些方法, 有的需要深厚的理论知识,有的需要较强的编程能力,有的较烦琐,在实际应用中,都不是理想的工具。UG的运动分析模块可对机构进行静力学及动力学的分析,分析的结果可直接导入Excel等软件进行进一步处理。 根据需要,还可建成转向系统与前悬架系统进行联合运动的运动模型,可以分析前悬架上下跳动各位置时转向梯形的特性,建立这样的模型,分析数据较多,较为复杂。通常仅需分析设计位置 (如空载或满载等) 的转向特性, 得出设计数据,再对其他位置进行校核即可,即只需做转向系统的运动分析即可。分析过程可很方便地对相关参数进行编辑修改,从而完成对转向梯形的优化设计。
本文以江淮某重卡双前桥载货车为例,通过UG建立三维数模再运用运动仿真模块建立运动仿真模型进行仿真分析。
1 转向运动学分析
转向梯形机构的主要功能是实现汽车转向时内、外轮转角保持一定的关系[2]。为了保证其良好的转向性能,减少轮胎磨损必须使各转向轮转向时尽量处于纯滚动状态,即使内、外轮转角关系尽量符合阿克曼公式[3]。重型汽车双前桥是一种较为复杂的结构,除了需要符合一般转向机构的要求,由于其自身结构的特殊性还会有一些特殊的规定:
1.1 转向轮理想运动关系
为了保证各转向轮转向时都作纯滚动,同一轴上的转向轮左转向角应满足阿克曼定律式(1)、(2);同时第一、二前桥已有的转向轮转向运动应满足运动协调关系(3)式;其转角关系如图1所示:

式中:α1、α2—第一、二桥左轮转角;
β1、β2—第一、二桥右轮转角;
L1—第一桥轴线至第三、四桥轴线的距离;L2—第二桥轴线至第三、四桥轴线的距离;
B—前桥主销中心距
转向性能要求的描述多是隐式的,需要经过进一步的分析表述成仿真模型能够检验的形式。
1.2 转向机构性能
转向梯形机构性能

其中B、L1、L2的值由汽车的总体设计决定。
双摆臂与第二桥转向梯形机构综合性能

验证就是根据仿真模型里给定的α1,按照上面的关系式求出与α1相对应的α2、β1、β2的理想值;然后通过仿真模型输出在模型中的α2、β1、β2;并将α2、β1、β2在仿真模型中的实际值和阿克曼公式计算出的理想值作比较。(4)表示第一桥转向梯形性能,(5)表示第二桥转向梯形性能;(6)表示第一、二桥左轮转向的关系,能够反映转向双摇臂的性能。(7)表示第一桥左轮与第二桥右轮的关系,能够反映转向双摇臂与第二桥转向梯形的性能。

图1 双前桥的转角关系
2 建立仿真模型
2.1 建立三维数模
利用UG三维建模模块对车架、前桥、摆臂、拉杆等进行建模[4],然后在装配模块中进行组装,得到转向系统三维数模如图2所示。此模型中不考虑前悬挂跳动因素,取其满载状态位置进行分析。
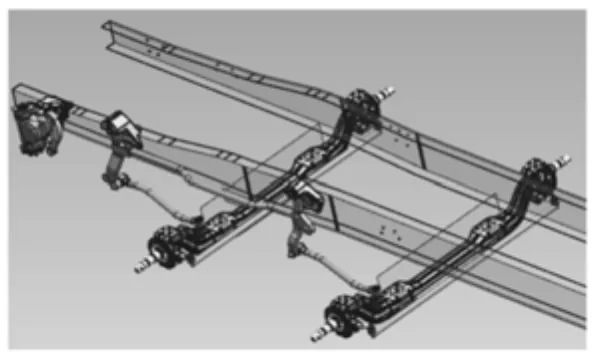
图2 转向系统三维数模
2.2 定义连杆
转向系统的运动过程为方向盘转动一个角度输入,通过转向传动机构,使转向轮转动一定角度,满足驾驶员的改变行驶方向的需求。双前桥转向系统转向传动关系如图3所示。

图3 双前桥转向传动关系
本次运动仿真重点分析双前桥转向梯形的协调性,可简化为:将第一桥左轮转角为一个输入α1,输出第一桥的右转角β1、和第二桥的左右转角α2、β2。根据双前桥转向传动关系,简化零件外形,忽略质量、质心位置、惯性等,定义连杆如下:(1)车架、摆臂支架、第一前轴、第二前轴,共同定义为连杆L001;(2)第一摆臂、第二摆臂及其与它们连接的球销分别定义为连杆L002和连杆L008;(3)第一前桥直拉杆、第二前桥直拉杆、过渡拉杆,分别定义为连杆L003、L009和L007;(4)第一前桥的左转向节和转向弯臂、第二前桥的左转向节和转向弯臂分别定义为连杆L004、L010;(5)第一前桥的横拉杆、第二前桥的横拉杆分别定义为连杆L005、L011;(6)第一前桥的右转向节、第二前桥的右转向节分别定义为连杆L006、L012;
2.3 定义运动副
(1)将连杆 1(L001)定义为固定副(J007);(2)将第一摆臂(L002)、第二摆臂(L008)绕摆臂支架(L001)中心旋转定义为旋转副(J001)(J004);(3)第一、二前桥的左右转向节(L004、L010 、L006、L012)分别绕第一、二前轴(L001)旋转定义为旋转副(J002、J 003、J005、J006);(4)第一直拉杆(L005)、第二直拉杆(L011)、过渡拉杆(L007)与过渡摆臂(L002、L008)通过球头销连接,定义为球面副(J008、J009、J011、J012);(5)转向弯臂(L004、L010)与第一二直拉杆(L005、L011)通过球头销连接,定义为球面副(J010、J013);(6)第一、二横拉杆(L005、L011)与第一、二前轴(L001)连接点定义为球面副(J014、J015、J016、J017);(7)第一、二前桥的右转向节(L006、L012)与第一、二前轴(L001)连接点定义为旋转副(J003、J006)。通过以上步骤建立的转向系统运动仿真模型如图3所示。

图3 转向系统运动仿真模型
3 定义驱动
此次仿真分析过程是对现有的转向梯形的验证分析。运动传递关系如图2所示,转向盘为驱动源, 分析转向盘转角与内外轮转角的关系等。在设计过程中, 因内轮转角大于外轮, 通常是以模型的内轮转角转到最大转角时,来校核转向系统与相邻件的硬干涉和软干涉情况, 因此,此仿真过程选定内轮 (可任意选择左右转向轮为转向内轮,由于运动过程中,车轮与转向节为一个刚体,此次仿真过程以转向节代替车轮) 在主销轴心线上的旋转副为驱动源, 并定义该旋转副的运动为恒定速度。对于此仿真模型,设定第一前桥左轮为内轮,转角从0°转到42°,步数设定为42步,这样就可得到每转动一度所对应的输出值。
4 输出结果
设定了第一前桥左转向节绕主销轴心线上的旋转角度α1为驱动以后, 转向梯形机构及左右车轮就可以按我们设定的空间参数进行运动了。运动仿真过程可以输出在运动过程中各杆件、车轮的角度、位移等情况。此次仿真分析的目的是对双前桥转向梯形的合理性进行分析优化,因此,在经过选取 Packaging 选项设定后, 提取模型中的α2、β1、β2值,输出到 excel中进行分析。此次仿真输出结果α2、β1、β2实际值见表 1。

表1 仿真结果输出值
5 结果与结论
汽车转向过程中实际转角与理论转角的误差越小,轮胎的磨损越小。 此次仿真模型输出的转角为实际转角,与通过阿克曼公式计算出理论转角进行对比,得出误差的具体差值,见表1。根据经验,转角在30°以内,误差不大于1,即为合格的转向梯形,否则需要调整三维数模中的转向梯形参数进行优化,直到满足设计要求。
此仿真方案已大量应用于转向系统的设计校核中,实车验证轮胎无偏磨现象,长期的市场反馈转向特性良好。但是,为了简化仿真过程,此仿真模型没有考虑前悬架跳动对转向系统的影响,后期可以增加前悬架与转向系统的干涉分析,这也是分析汽车操纵稳定性的关键因素。此仿真对比分析的方法也可应用于别的运动系统,为设计者增加了一种可供选择的分析方法。
[1] 余志生. 汽车理论[M]. 北京:机械工业出版社,2000.
[2] 陈家瑞. 汽车构造[M]. 北京:机械工业出版社, 2001.
[3] 余志生. 汽车设计[M]. 北京:机械工业出版社,2002.
[4] 胡晓康编译.UG运动分析培训教程[M].北京:清华大学出版社,2002.
Motion Simulation And Analysis Based On Ug For Dual-Front Axle Steering System
Li Jing, Peng Huaihui
( Anhui jianghuai automobile group co., LTD, Anhui Hefei 230601 )
The paper introduces a kind of dual-front axle steering system analytical method.Through the motion simulation module of UG to simulate the dual- front axle steering system, A angle of the first front axle as input, to solve the other angle of the front axle, Compared with the angle calculated by Ackerman principle. To analyze the rationality of the first or second front axle steering trapezium, and the rationality of the dual-front axle rod system, provide the basis for the optimal design of the double front axle steering system.
dual-front axle steering system; motion simulation; contrastive analysis
CLC NO.: U463.4 Document Code: A Article ID: 1671-7988 (2017)12-145-03
U463.4 文献标识码:A 文章编号:1671-7988 (2017)12-145-03
10.16638/j.cnki.1671-7988.2017.12.048
李静(1987-),女,工程师,就职于安徽江淮汽车集团股份有限公司,从事前桥转向系统设计工作。