基于移动端的车辆运行状态检测系统研究
2018-01-09张浩张红卫郑雪莲
张浩,张红卫 ,郑雪莲
(1.交通运输部公路科学研究院,北京 100088;2.运输车辆运行安全技术交通行业重点实验室,北京 100088;3.吉林大学交通学院,长春 130022)
基于移动端的车辆运行状态检测系统研究
张浩*1,2,张红卫1,2,郑雪莲3
(1.交通运输部公路科学研究院,北京 100088;2.运输车辆运行安全技术交通行业重点实验室,北京 100088;3.吉林大学交通学院,长春 130022)
为降低车辆运行状态检测成本、提高检测便捷性,文章在分析传统车辆运行状态检测技术利用GPS定位、测速功能和惯性传感器测姿功能以实现车辆运行状态检测的基础上,结合移动端内置传感器的种类和功能,探究了基于移动端的车辆运行状态检测的可行性,并依据GPS/INS组合导航方法设计了GPS重调惯导、位置和速度信息组合模式两种检测方案。研究结果可为移动端测试技术在车辆运行状态检测上的应用提供理论依据和技术支持。
汽车运用;车辆运行状态检测;GPS/INS组合导航;移动端;传感器标定
引言
车辆运行状态检测是利用专门的仪器设备获得车辆位置、速度、姿态等。通过检测车辆的运行状态,可以对车辆的操纵稳定性、制动性等进行评价,有助于了解车辆的动力学性能。然而,现有的检测系统价格昂贵、使用复杂,限制了车辆运行状态检测的推广,也使得普通驾驶人难以准确了解和掌握车辆运行状态。
随着移动端的广泛使用,加之移动端内置的GPS及惯性传感器模块,应用智能移动端进行导航、测速、状态监控等得到了学者们的关注。因此,本文旨在分析传统车辆运行状态检测系统工作原理的基础上,探究利用移动端内置传感器进行车辆运行状态检测的可行性,并在此基础上设计基于移动端的车辆运行状态检测系统。
1 汽车运行状态检测技术的发展历程及现状
汽车运行状态检测技术源于20世纪50年代。检测技术的发展与试验仪器、测试设备的技术进步密切相关。截止到目前,车辆运行状态检测系统可大致分为两种:
(1)基于光电传感器的检测技术。它以光电效应为基础,把被测量的变化转换成光信号的变化,然后借助光电元件进一步将非电信号转换成电信号。光电检测方法具有精度高、反应快、非接触等优点,在检测和控制中得到广泛应用。日本小野测器株式会社研发的小野 DL3000测试系统和德国Corrys-Datron Sensor System Inc开发的Datron测试系统是典型的光电传感器检测系统。
(2)基于GPS/INS的检测技术。它借助GPS定位技术和惯性测量技术进行物体运行状态的检测,在飞行器、轮船以及地面车辆的定位和导航中得到了广泛应用。英国Racelogic基于GPS定位原理研发的VBOX测试系统以及利用惯性传感器开发的三轴加速度传感器已经广泛应用在车辆操纵稳定性检测等领域。
2 GPS/INS车辆运行状态检测系统原理分析
对车辆运行状态的准确描述,需要涉及车辆的运行轨迹、方向、速度、加速度、车身转动角速度和角位移等信息。在车辆运行状态的表征参数中,行驶轨迹和运行方向用于描述车辆在空间的位置和前进方向随时间的变化;速度、加速度描述车辆位移快慢随时间的变化;车身转动角速度和角位移描述车身姿态随时间的变化。因此,GPS/INS系统需获得车辆位置参数、速度参数、加速度参数、角度参数和角速度参数。
2.1 GPS定位、测速、测姿原理
利用空间距离交会原理,GPS可以获得运载体的经纬度和海拔(图 1)。当选定地面上的某一点作为参考点之后,利用北东天站心坐标系和地球大地坐标系之间的转换矩阵,可以将经纬度和高程表示的车辆位置换算成以北东方位表示的相对于参考点的位置。借助伪距测量、载波相位测量(图2)等高精度测量方法,GPS的定位精度在借助基站的情况可达厘米级。

图1 GPS定位原理

图2 载波相位测量原理
在GPS高精度定位的基础上,通过位置差分则可获取运载体的运行速度。然而,位置差分所产生的误差较大。目前,GSP一般利用原始多普勒观测值直接计算速度,或者利用载波相位中心差分所获得的多普勒观测值计算速度。
GPS测姿是利用 GPS接收机来测量不同天线之间的相对位置,并通过精确的相对位置进行定向、定姿计算。使GPS具备姿态测量功能需满足以下条件:
→ GPS接收机使用两个或更多天线构成基线向量。当采用两天线时,GPS接收机可以测量车辆航向和俯仰角(图3)或者车辆航向和侧倾角(图4);当采用不在一条线上的3天线时,能组合测量车辆的航向角、俯仰角和侧倾角(图5)。
→ 采用载波测量数据。GPS接收机所能测量的伪距精度不足以测量车辆姿态,必须使用载波的测量数据。
→ 解求载波周期模糊度。

图3 双天线纵向布置

图4 双天线横向布置

图5 三天线布置
GPS在定位和测速方面具有很高的精度,姿态测量的精度则受到很大限制。尤其是在GPS信号丢失后重新开始定位时,此时GPS测姿结果与实际情况相差较大。
2.2 INS定位、测速、测姿原理
惯性系统由陀螺仪和加速度计构成。陀螺仪是利用角动量守恒定律制成的具有方向指示功能和角运动测量功能的仪器,其具有进动性和稳定性。借助其稳定性,可以测量物体转动的角位移;借助其进动性,则可以测量物体的转动角速度。加速度计用于测量运载体的线加速度。在使用时,沿加速度计敏感轴的输出并不是运载体的运动加速度,而是惯性加速度与地球引力加速度的矢量差,称之为比力。因此,在利用加速度计测量运载体加速度时,需要从比力中扣除重力加速度在该轴上的分量。
如果已知惯性系统的基准方向以及最初的位置信息,可借助积分确定运载体的方位、位置和速度。
惯性系统在测量物体姿态和加速度方面具有很高的精度。利用惯性系统对物体进行定位时,需借助积分方法实现,容易累积误差,因而其在定位方面的精度较差。
2.3 GPS/INS组合测量原理
GPS/INS测量将GPS的长期高精度性能和惯导系统的短期高精度性能有机结合起来,使组合后的导航性能比任意系统单独使用时有很大提高。随着组合水平的不断加深,GPS和INS之间的信息交流不断加强,组合测量的总体性能要远远优于单独系统。GPS/INS组合测量的优势体现在:
→ 高精度的GPS信息可用来修正INS信息,控制INS误差随时间的积累;
→ GPS/INS组合测量加强了系统的抗干扰能力;
→ 解决了GPS动态应用采样频率低的问题;
→ 组合系统降低了对惯导系统的要求。
GPS/INS组合可根据不同的应用要求选择不同层次的组合。按照组合深度的不同,其分为松散组合和紧密组合(图6)。

图6 GPS/INS组合测量方案
松散组合的结构简单,便于工程实现。组合后,两系统仍独立工作,使测量信息有一定余度;缺点是GPS的定位误差通常是时间相关的,特别是在GPS接收机应用卡尔曼滤波时。
紧密组合利用GPS接收机输出的伪距、伪距率等原始信息进行定位、测速;在可见卫星少于4颗时,仍能进行卡尔曼滤波,可解决GPS信号失效的问题,并利用状态估计结果校正惯性导航系统。另外,紧密组合利用的是GPS接收机的原始信息,与GPS接收机输出的位置、速度相比,伪距、伪距率不带有时间相关性,对组合滤波中的滤波结果更有益。
3 基于移动端的车辆运行状态检测研究
3.1 移动端内置传感器的种类和功能分析
目前,绝大多数移动端配备多种传感器以感受其所处位置、姿态、环境等。根据功能不同,传感器可分为运动、位置和环境传感器。常见运动和位置传感器的性能如表1所示。

表1 Android平台常见运动和位置传感器的性能
由表1可知,移动端内置传感器能够测量移动端的运动状态。如果将移动端放置在车辆上,并固定其移动,则可借助移动端测量车辆运行状态。
为了让用户能够快速的对传感器进行访问,并读取其采集到的原始数据,大部分移动端给开发者提供了方便的开放接口。通过这个统一的接口,可以对不涉及机密的传感器数据进行访问,并在此基础上进行数据开发。
因此,利用客户端进行车辆运行状态检测是切实可行的。
3.2 移动端车辆运行状态检测系统设计
车辆检测系统主要是采集、处理、显示和存储车辆运行状态数据以及轨迹信息。结合已有的车辆运行状态检测系统功能,基于移动端的检测系统的总体需求主要包括6个方面:
(1)采集和处理车辆运行状态数据、轨迹数据;
(2)实时显示车辆运行状态和轨迹;
(3)车辆超速、危险状态预警功能;
(4)数据存储和导出;
(5)数据传输;
(6)功能开启和关闭。
由于移动端的ECU处理能力和速度非常有限,检测系统应尽量减少复杂运算,以提高系统的实际可用性。
根据检测系统的需求分析,将系统功能划分为车辆运行状态采集模块、电子地图模块、状态实时显示模块、数据存储模块,以及蓝牙或无线通信模块五大部分(图7)。
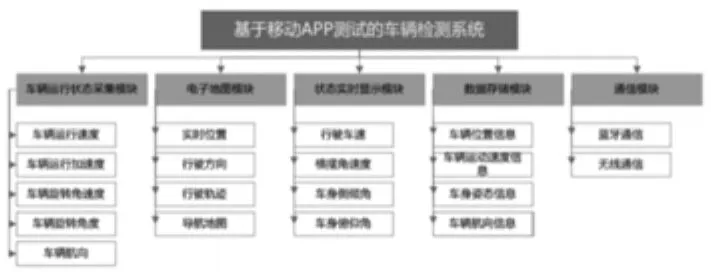
图7 基于移动端的车辆运行状态检测系统功能设计
3.3 检测系统的方案设计
借助移动端内置GPS模块和惯性传感器获取车辆位置、航向、速度和加速度、角速度以及角位移的方法与传统GPS/INS组合导航方法类似。根据GPS/INS组合导航方法,基于移动端测试技术的车辆检测方案可分为两种。
3.3.1 GPS重调惯导方案
方案布置如图8所示。车辆位置和速度利用GPS模块获得;加速度借助加速度传感器和重力传感器获得;三轴角速度借助陀螺仪获得;姿态角和航向角利用加速度传感器和磁场传感器获得。

图8 GPS重调惯导方案
当车辆在隧道、涵洞等遮盖地行驶时,GPS模块无法接收到卫星数据,使得车辆定位中断,其位置和速度信息丢失。该情况发生时,可利用惯性传感器短时获取车辆速度和位移;在GPS恢复正常时,继续采用GPS获取车辆位置和速度。

图9 位置+速度信息组合方案
3.3.2 位置+速度信息组合方案
方案布置如图9所示。用GPS模块和惯性传感器输出的位置和速度信息的差值作为量测值,经卡尔曼滤波来估计惯性传感器的误差,然后对惯性传感器进行校正,获得车辆位置、速度、姿态等。
3.4 移动端传感器标定
为获取准确的车辆运行状态,需要对移动端内置传感器的性能参数做出标定,从而对测得数据进行误差补偿,提高系统的检测精度。
针对陀螺仪传感器的输出误差,可采用转台法对各轴角速度进行标定。将移动端固定在步进电机的转台上,对3轴依次进行指定的转速标定,误差系数定义为3组测试数据的平均值,以提高标定精度。
加速度传感器的标定方法与陀螺仪传感器相同。针对加速度传感器的输出误差,用加速度传感器感应重力加速度的方法来完成。将移动端的3轴依次垂直水平面在步进电机的转台上固定,分别测出加速度为g和-g时各轴向的加速度值,并标定其误差系数。
4 结论
通过分析移动端内置传感器的种类和功能可知,借助移动端内置的运动和位置传感器,在移动端接口开放的条件下,可以设计基于移动端的车辆运行状态检测系统。本文中设计了两种车辆运行状态检测方案。论文研究成果可为后续开发基于移动端的车辆运行状态检测系统提供理论参考。
本文受到“运输车辆运行安全技术交通运输行业重点实验室开放课题”资助。
[1] 王玉春, 申兆亮, 高尚宇.光电转角传感器在汽车上的应用[J]. 农机化研究, 2001, (03): 109-111.
[2] 陆晶晶, 张为公, 周耀群. 基于GPS和加速度计的车速测量系统的开发与研制[J]. 测控技术, 2007, 26(8):15-16.
[3] Bevly D M, Sheridan R, Gerdes J C. Integrating INS sensors with GPS velocity measurements for continuous estimation of vehicle sideslip and tire cornering stiffness[J]. IEEE Transactions on Intel-ligent Transportation Systems, 2007, 7(4): 483-493.
[4] 李永生. 基于GPS及IMU的汽车道路试验系统的研究[D]. 西华大学, 2009.
[5] 管欣, 闫冬, 高振海. 基于惯性导航和实时差分全球定位系统的汽车运动状态测试系统[J]. 吉林大学学报(工学版), 2006, (01):14-19.
[6] 刘军, 聂斐, 蔡骏宇等. 基于安卓的汽车状态测量及预测系统的研究[J]. 汽车技术, 2015(2):29-33.
[7] 刘军, 程伟, 袁所贤. 基于android的侧翻预警系统研究[J]. 汽车技术, 2016, (03): 36-40.
Research on Vehicle Driving State Detection System Based on Mobile End
Zhang Hao*1,2, Zhang Hongwei1,2, Zheng Xuelian3
( 1.Research institute of highway ministry of transport, Beijing 100088; 2.Transport vehicle running safety technology the industry focus on the experiment, Beijing 100088; 3.Jiaotong university, jilin university, Changchun 130022 )
In order to reduce thecost of vehicle driving state detection and improve its convenience, the paper analyzed the traditional detection technologyon vehicle driving state based on GPS and inertial sensor, then investigate the feasibility of vehicle driving state detection based on the exploration of types and functions of mobile end built-in sensor.Two kinds of detection schemes were proposed according to different GPS / INS integrated navigation methods, which are GPS reconfigurable inertia mode and position and velocity information combination mode. Thestudy result can provide theoretical and technical support for the application of mobile end test technology in the detection of vehicle driving status.
Automobile application; vehicle driving state detection; GPS / INS integrated navigation; mobile end;sensor calibration
CLC NO.: U461.6 Document Code: A Article ID: 1671-7988 (2017)12-87-04
U461.6 文献标识码:A 文章编号:1671-7988 (2017)12-87-04
10.16638/j.cnki.1671-7988.2017.12.028
张浩,男,交通运输部公路科学研究院副研究员。主要研究方向:货运车型标准化、汽车列车行驶稳定性和通过性测试评价技术研究等。张红卫,男,交通运输部公路科学研究院首席汽车工程师,高级工程师。主要研究方向为:汽车安全与节能环保等性能评价分析与控制对策,产品可靠性与质量控制技术、认证与质量管理、汽车标准化等。项目基金:[*]本文受到“运输车辆运行安全技术交通运输行业重点实验室开放课题”资助。