基于向量组的动静平台几何装配条件自动分析与综合方法
2017-12-29谢冬福罗玉峰石志新彭艳蓝
谢冬福 罗玉峰,2 石志新 彭艳蓝
1.南昌大学机电工程学院, 南昌,3300312.华东交通大学机电与车辆工程学院,南昌,330013
基于向量组的动静平台几何装配条件自动分析与综合方法
谢冬福1罗玉峰1,2石志新1彭艳蓝1
1.南昌大学机电工程学院, 南昌,3300312.华东交通大学机电与车辆工程学院,南昌,330013
基于方位特征集理论,提出了一种基于向量组的动静平台几何装配条件自动分析与综合方法,给出了其主要步骤和流程图。实例分析表明:在并联机构拓扑结构设计过程中,提出的自动分析与综合方法可综合出更多的机构,且综合出的机构更具一般性;在并联机构拓扑结构分析与综合过程中,所提出的方法减少了对设计者人为经验、灵感等因素的依赖,提高了并联机构拓扑结构综合的效率,方便计算机对机械系统进行自动分析与综合。
并联机器人;自动分析与综合;向量组;几何装配条件
0 引言
机器人机构的拓扑结构创新设计理论与方法研究已成为国际机构学界的热点[1]。并联机构型综合主要有三种方法:基于螺旋理论的方法、基于位移子群的方法和基于方位特征(position and orientation characteristics,POC)集的方法[2-5]。基于POC集的方法具有运算规则少、数学方法简单、能得到非瞬时机构和非瞬时自由度等特点[5]。现代机构学的最高任务是发明新机构,因此需要开拓以功能为导向、实现特定性能的新机构的发明途径,发展专一、高效、高选择性的机构创新设计方法[4]。但长期以来,机构发明主要依靠设计者的经验、灵感、知识和直觉等,这就使得新机构的发明变得非常困难,因此,找到一种既能减少对设计者经验、直觉等的依赖又高效的拓扑结构设计方法具有重要意义。将拓扑结构设计过程用计算机来完成,实现程序化操作,能够解决上述问题。BELFIORE等[6]研究了平面运动链的计算机程序自动算法;MRUTHYUNJAYA等[7]借助关联矩阵等计算机辅助技术对平面机构的数字化构型综合进行了研究;WANG等[8]提出了一种计算机符号化的机械系统概念设计方法;HWANG等[9]研究了单铰链平面机构的数字化构型综合;SAURA等[10]提出了一种含低副和高副的平面机构计算机程序化构型综合方法;DING等[11-12]系统地研究了平面机构的数字化构型综合理论并建立了多种平面机构的构型图谱库;曹文熬[13]基于螺旋理论研究了空间多环耦合机构数字化构型综合问题;廖明等[14-15]借助计算机辅助技术研究了并联机构的符号化描述。纵观近几十年来的文献不难发现,平面机构的数字化构型综合已取得较大的进展,但对空间机构的数字化构型综合的研究还较少。
目前,并联机构的型综合主要还是手动综合,通过枚举法一一列举出来,综合的机构一般较为简单;当机构较为复杂时,手动综合容易出错,效率较低,并且综合的机构不易保存。本文基于POC集方法,借助向量组的思想,对并联机构拓扑结构设计的部分过程进行程序化设计,以方便计算机对机械系统进行自动分析与综合。
1 理论基础
1.1 并联机构拓扑结构设计的理论基础
(1)POC集的内涵。POC集用于描述机构任意两个构件相对运动的方向和位置特征,实质上是描述机构自由度(DOF)数目、类型和方向特征的集合。POC集可定义为
(1)
式中,Mij为构件i相对于构件j的POC集;t表示 独立移动元素;r表示独立转动元素;(dir.)表示移动元素(转动元素)的方向向量组;p为独立移动元素的个数,即其后方向向量组(dir.)的秩(p=0,1,2,3);q为 独立转动元素的个数,即其后方向向量组(dir.)的秩(q=0,1,2,3)。
当p=0(或q=0)时,无需标明方向,记为t0(或r0);当p=3(或q=3)时,在三维空间已满秩,方向为任意,无需标明方向,记为t3(或r3);p与q的和即为机构的自由度数。
(2)串联机构的POC方程为
(2)
式中,MS为串联机构末端构件的POC集;MJi为第i个运动副的POC集(对末端构件上的同一个基点而言);m为运动副数目;MSj为第j个子单开链(SOC)的POC集(对末端构件上的同一个基点而言)。
(3)并联机构的POC方程为
(3)
式中,MPa为并联机构动平台的POC集;υ为机构独立回路数;Mbj为当其他支路不存在时,第j条SOC支路末端构件的POC集(所有支路的POC集对动平台的同一个基点而言)。
(4) 并联机构的自由度为
(4)
式中,fi为第i个运动副的自由度;ξLj为第j个独立回路的独立位移方程数。
(5)支路的POC集。由并联机构POC方程(式(3))可知,支路的POC集应为
Mbi⊇MPai=1,2,…,υ+1
(5)
(6)支路在动静平台装配的基本原理。由Mbi⊇MPa(式(5))可知,如果由i条支路组成的子并联机构的POC集MPa(1-i)仍然含有MPa所不含有的元素,则装配的第i+1条支路的POC集Mb(i+1)与MPa(1-i)的交运算应至少约束掉MPa(1-i)的一个元素,且该元素是MPa所不包含的。
1.2 并联机构拓扑结构设计的一般过程
这里只给出主要步骤,详细步骤见文献[5]。
(1)给定并联机构动平台的POC集MPa。
(2)确定支路结构类型。基于串联机构POC方程(式(2))与并联机构POC方程(式(3)),设计简单支路(SOC)和复杂支路(HSOC)的拓扑结构类型。
(3)确定支路的组合方案。已知并联机构的SOC支路和HSOC支路的机构类型以及支路数目,可确定支路组合方案。
(4) 确定支路在动静平台装配的几何条件。已知支路结构类型和支路组合方案,以实现并联机构动平台POC集为目标,基于并联机构POC方程(式(3))和支路在动静平台装配的基本原理,可确定支路在动静平台装配的几何条件。
(5) 检验自由度。基于自由度公式(式(4)),检验机构的自由度是否满足设计要求。
(6) 确定机构的消极运动副。基于消极运动副判定准则[5],判定机构的消极运动副。如果存在消极运动副,则删除之,并且还需要检验并联机构动平台的POC集是否满足设计要求。
(7) 确定机构的驱动副。基于驱动副判定准则[5],确定并联机构的驱动副。
(8) 确定并联机构的拓扑结构。由以上步骤的结果,可确定并联机构的拓扑结构,包括:①支路拓扑结构与支路组合方案;②动平台的拓扑结构;③定平台的拓扑结构;④驱动副的位置。
(9) 进行并联机构拓扑结构类型的特性分析:①基于基本运动链(BKC)判定方法[5],确定并联机构(已知驱动副)包含的BKC类型及其耦合度;②基于自由度类型判定准则[5],确定机构的自由度类型;③基于机构的输入输出解耦原理[5],确定机构运动的输入输出解耦性;④确定机构的拓扑结构特征,为优选结构类型提供依据。
并联机构拓扑结构设计的一般过程主要包括上述9个步骤,目前拓扑结构设计的这9个步骤主要依赖于人的经验和灵感,由操作者手工完成,使得综合效率较低,且综合出来的机构类型有限。为解决这些问题,可将拓扑结构设计的9个步骤逐步用计算机来操作,最终实现并联机构拓扑结构设计过程的程序化。这样不仅可以减少对设计者人为经验和灵感等因素的依赖,而且可以提高综合效率,得到更多的新机构。
2 基于向量组的动静平台几何装配条件自动分析与综合
确定支路在动静平台进行装配的几何条件是并联机构拓扑结构设计的关键步骤之一。本文对基于POC集的并联机器人拓扑结构设计[5]的一般步骤中的第4步进行改进,使其能进行程序化设计。在并联机构拓扑结构综合中,给定动平台的POC集,需要确定支路类型及支路在动静平台上的几何装配条件;在并联机构拓扑结构分析中,给定支路类型、支路组合方案及支路在动静平台的几何装配条件,可以得到动平台的POC集。在确定支路在动静平台装配的几何条件时,文献[5]是将支路两两相交,通过穷举法得出动静平台上装配的几何条件,此方法效率较低,而且容易出错,故本文提出一种改进方法。由1.1节知,串联机构的POC方程是将若干运动副(或若干SOC)的POC集相“并”(“∪” ),实质是将若干表示方向的子向量集相“并”,而“并”的实质是增加新元素,若后一向量集中的元素与前一向量集中的元素相关,则方向向量组中向量不变,秩也不变;若后一向量集中的元素与前一向量集中的元素不相关,则方向向量组中增加一个新向量,秩增加1,直到秩为3为止;并联机构的POC方程是将若干支路的POC集相“交”(“∩” ),实质是将若干表示方向的子向量集相“交”,而“交”的实质是求共同元素。所以求机构的POC集的过程实质上是求由若干子向量组所组成的新向量组的最大无关组的过程。改进方法是:基于线性代数中最大线性无关向量组的思想,在确定平台装配的几何条件时将多条支路求交问题转换为求最大线性无关向量组问题,此方法在下文简称最大无关组求交法。判断向量之间的相关性以及求最大无关组问题在数学上已有相关程序可以解决,因此,用此方法对动静平台的几何装配条件进行自动分析与综合是可行的。
2.1 并联机构POC方程的运算规则
2.1.1移动元素之间的“交”运算规则
令t1(∥li)表示平行于方向向量li的一个独立移动元素,t2(⊥nj)表示垂直于方向向量nj的两个独立移动元素,其中i,j=1,2,…,n(n为支路数)。由于t3已满秩,故方向为任意,无需标明方向。于是,并联机构多条支路的求交问题就可转换为由若干方向向量li(或nj)所组成的向量组的最大无关组问题。
并联机构多条支路移动元素的求交运算规则主要包括如下几种情况:
(1)当所有支路均为只有一个独立移动元素的支路时,并联机构多条支路移动元素的交为

(6)
式中,r(L)表示由若干方向向量li组成的向量组的秩。
(2)当所有支路均为只有两个独立移动元素的支路时,并联机构多条支路移动元素的交为
(7)
式中,t1(⊥◇(nj,nk))表示垂直于由向量nj、nk张成的平面的一个独立移动元素(j,k=1,2,…,n且j≠k);r(N)表示由若干方向向量nj组成的向量组的秩。
(3)当支路为有一个独立移动元素的支路和两个独立移动元素的支路时,并联机构多条支路移动元素的交为

(8)
式(8)中,当li·nj=0时,r(N)=1或r(N)=2;由于t3已满秩,所以当存在三个独立移动元素的支路时,方向为任意。
2.1.2转动元素之间的“交”运算规则
同理,令r1(∥li)表示平行于方向向量li的一个独立转动元素,r2(⊥nj)表示垂直于方向向量nj的两个独立转动元素(nj为两转动副轴线张成平面的法向量),可得到并联机构多条支路转动元素的求交运算规则如下:
(1)当所有支路均为只有一个独立转动元素的支路时,并联机构多条支路转动元素的交为
(9)
(2)当所有支路均为只有两个独立转动元素的支路时,并联机构多条支路转动元素的交为

(10)
式中,r1(⊥◇(nj,nk))表示垂直于由向量nj、nk张成的平面的一个独立转动元素。
(3)当支路为有一个独立转动元素的支路和两个独立转动元素的支路时,并联机构多条支路转动元素的交为

(11)
同理,与移动元素之间的“交”运算规则类似,由于r3已满秩,所以当存在三个独立转动元素的支路时,方向也为任意。并联机构的交运算规则是移动元素与移动元素相交,转动元素与转动元素相交,并未考虑移动元素相交后对转动元素(转动元素相交后对移动元素)的影响,故本文在计算移动元素交运算时,假定转动为r3;在计算转动元素交运算时,假定移动为t3。
2.2 基于向量组的动静平台几何装配条件自动分析
2.2.1自动分析的一般过程
以并联机构(PM)支路在动静平台间几何装配条件为出发点,已知支路类型及组合方案,求并联机构动平台的POC集的过程称为并联机构支路在动静平台间几何装配条件的自动分析,其一般过程如图1所示(图中POC(PM)表示并联机构(PM)的方位特征集(POC)),主要步骤如下:
图1 动静平台上的几何装配条件自动分析流程Fig.1 Automatic analysis flow chart of geometric assembly conditions on a moving and fixed platform
(1)输入支路组合方案。支路组合方案为p个t1(∥li)支路,q个t2(⊥nj)支路,k个t3支路。
(2) 判定支路组合方案属于哪种支路组合类型。
定义1 称含t1(∥li)(p>0)支路和t2(⊥nj)(q>0)支路(可含有t3支路)的组合方案为支路组合类型一。
定义2 称不含t1(∥li)(p=0)支路而含t2(⊥nj)(q>0)支路(可含有t3支路)的组合方案为支路组合类型二。
定义3 称含t1(∥li)(p>0)支路而不含t2(⊥nj)(q=0)支路(可含有t3支路)的组合方案为支路组合类型三。
由于t3已满秩,支路全为t3支路时,并联机构动平台POC集均为t3。
(3)确定方向向量组的秩。根据并联机构支路在动静平台间的几何装配条件,由计算机自动判定方向向量组的秩。若为支路组合类型一,则在确定方向向量组的秩之后,还需判定两向量组中的向量是否相互垂直来确定动平台POC集合,即判定li·nj=0是否成立。
(4)根据并联机构POC方程的运算规则确定并联机构动平台的POC集。
(5) 输出并联机构动平台的POC集。
转动元素的支路在动静平台间几何装配条件的自动分析一般过程与移动元素情况相同,不再赘述。
2.2.2实例分析


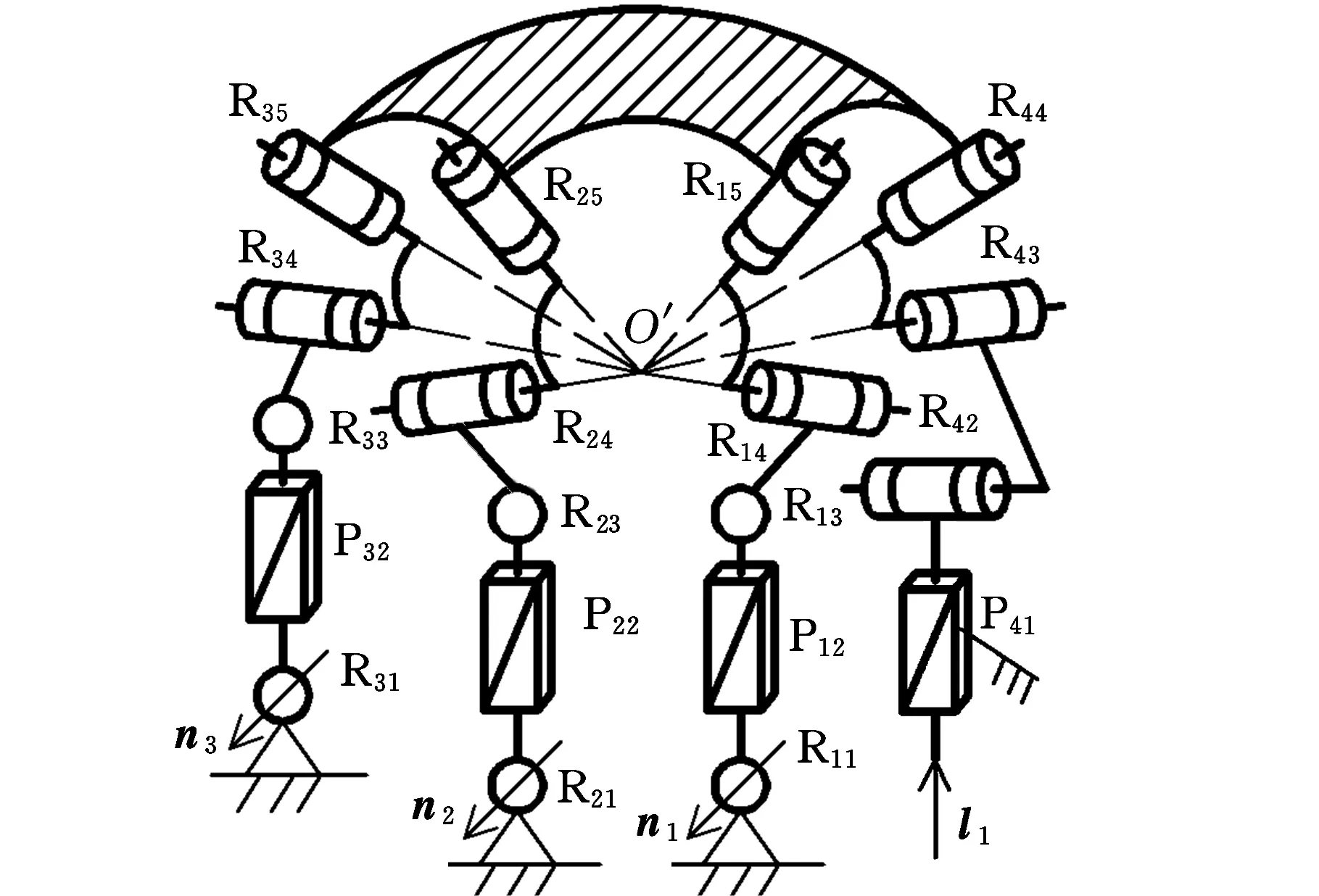
图2 机构简图及矢量方向(实例1)Fig.2 Mechanism diagram and vector direction (example 1)
(1)确定支路末端构件的POC集。取Ri4副与Ri5副两轴线的交点为基点,则支路末端构件的POC集为
其中,Ri1表示沿Ri1轴线方向的方向矢量。
(2)确定动平台的POC集。①输入支路组合方案:p=0,q=4,k=0。② 判定支路组合方案属于哪种支路组合类型,由步骤①知,支路只含t2(⊥nj)支路,不含t1(∥li)支路,故此组合方案属于组合类型二。这里nj=Ri1,i=j。③确定方向向量组的秩。根据并联机构支路在动静平台间几何装配条件:静平台上R11∥R31⊥R21∥R41,由计算机自动得出方向向量组N=(n1,n2,n3,n4)T的秩r(N)=2。④ 确定并联机构动平台的POC集。由步骤③知,方向向量组的秩为r(N)=2,根据并联机构POC方程的运算规则(式(7))知,并联机构动平台移动元素的POC集为[t1(⊥◇(n1,n4))],每条支路均为r3,故动平台转动元素的POC集为[r3]。⑤ 输出并联机构动平台的POC集:
该自动分析方法同样适用于其余两种情况,即p>0且q>0和p>0且q=0的情况,此处不再赘述。
2.3 基于向量组的动静平台几何装配条件自动综合
2.3.1自动综合的一般过程
以并联机构动平台的POC集为出发点,已知支路类型及组合方案,求并联机构支路在动静平台间几何装配条件的过程称为并联机构支路在动静平台间几何装配条件的自动综合。其一般过程如图3所示,主要步骤如下:
图3 动静平台上的几何装配条件自动综合流程Fig.3 Automatic synthesis flow chart of geometric assembly conditions on a moving and fixed platform
(1)同2.2.1节步骤(1)。
(2)同2.2.1节步骤(2)。由于t3已满秩,故支路全为t3支路时,支路几何装配条件为任意。
(3)根据并联机构POC方程的运算规则,并结合并联机构动平台POC集确定方向向量组的秩。

(5) 根据步骤(3)所得的向量组的秩和步骤(4)所得的向量组的一组基确定动静平台间的几何装配条件。
(6)输出几何装配条件。
转动元素的支路在动静平台间几何装配条件的自动综合的一般过程与移动元素情况相同,不再赘述。
2.3.2实例分析
例2 已知并联机构的支路组合方案为


为使动平台的POC集为一个独立移动元素和三个独立转动元素,试确定动静平台上的几何装配条件。具体步骤如下:
(1)确定支路末端构件的POC集。由例1知,3条相同支路末端构件的POC集为
另一条支路末端的POC集为
其中,P41表示沿P41轴线方向的方向矢量。
a. P41⊥R31∥R21∥R11。
⑥输出步骤⑤中的三类几何装配条件。
(3)确定支路在动平台装配的几何条件。由转动元素之间的“交”运算规则知,当支路全为三个独立转动元素的支路时,并联机构多条支路转动元素的交在任何几何装配条件下仍然为r3,故在此种情况下不需要考虑支路在动平台的几何装配条件(此处取8个转动副的8条轴线相交于同一点O′)。
由上述已知条件可绘制出机构简图,分别如图4a~图4c所示。该自动综合方法同样适用于其余两种情况,即p=0且q>0、p>0且q=0的情况,不再赘述。
(a)R31∥R21∥R11
(b)R31∥R11R21
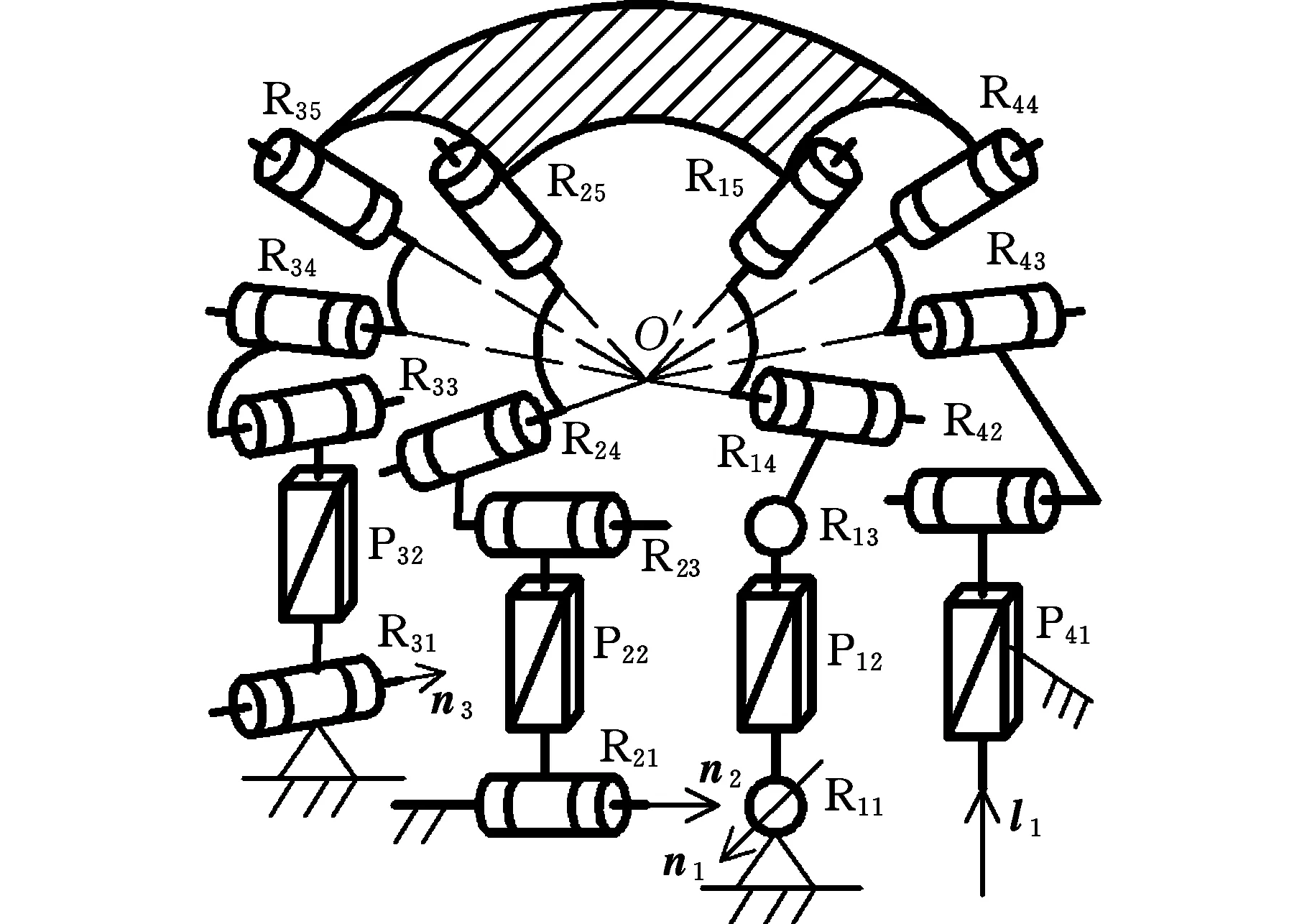
(c)R31、R21、R11三者均不平行图4 机构简图及矢量方向(实例2)Fig.4 Mechanism diagram and vector direction (example 2)
3 结论
(1)基于方位特征集理论,在并联机构动静平台几何装配条件的分析与综合中,提出了一种基于最大线性无关组的自动分析与综合方法。
(2)在并联机构拓扑结构综合中,所提方法可综合出更多的机构,且综合出的机构更具一般性。
(3)所提方法不仅适用于含P副和R副的无过约束和一般过约束机构,同样适用于有球铰和螺旋副等空间运动副的机构构型综合。
(4)在并联机构拓扑结构分析与综合时,所提方法减小了对人为经验、灵感等因素的依赖,提高了并联机构拓扑结构分析与综合的效率,为后续计算机对机械系统进行自动化分析与综合提供了依据。
[1] MERLET J. An Initiative for the Kinematics Study of Parallel Manipulators[C]//Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators. Quebec, Canada,2002:1-8.
[2] YANG Tingli, LIU Anxin, JIN Qiong, et al. Position and Orientation Characteristic Equation for Topological Design of Robot Mechanisms[J]. Journal of Mechanical Design, 2009, 131(2): 0210011-02100117.
[3] 沈惠平,尹洪波,李菊,等. 基于方位特征方法的范例并联机构的拓扑特征分析及其启示与应用[J]. 机械工程学报,2015,51(13): 101-115.
SHEN Huiping, YIN Hongbo, LI Ju, et al. Position and Orientation Characteristic Based Method and Enlightenment for Topology Characteristic Analysis of Typical Parallel Mechanisms and Its Application[J]. Journal of Mechanical Engineering, 2015, 51(13): 101-115.
[4] 杨廷力. 机器人机构拓扑结构学[M]. 北京:机械工业出版社,2004.
YANG Tingli. Topological Structure of Robot Mechanism [M]. Beijing: Machinery Industry Press, 2004.
[5] 杨廷力,刘安心,罗玉峰,等. 机器人机构拓扑结构设计[M]. 北京:科学出版社,2012.
YANG Tingli, LIU Anxin, LUO Yufeng, et al. Design of Topological Structure of Robot Mechanism [M]. Beijing: Science Press, 2012.
[6] BELFIORE N P, PENNESTRI E. Automatic Sketching of Planar Kinematic Chains[J]. Mechanism and Machine Theory, 1994, 29(1): 177-193.
[7] MRUTHYUNJAYA T S, RAGHAVAN M R. Computer Aided Analysis of the Structure of Kinematic Chains[J]. Mechanism and Machine Theory, 1984, 19(3): 357-368.
[8] WANG Yuxin, YAN Hongsen. Computerized Rules-Based Regeneration Method for Conceptual Design of Mechanisms[J]. Mechanism and Machine Theory, 2002, 37(9): 833-849.
[9] HWANG W M, HWANG Y W. Computer-Aided Structural Synthesis of Planar Kinematic Chains with Simple Joints[J]. Mechanism and Machine Theory, 1992, 27(2): 189-199.
[10] SAURA M, CELDRAN A, DOPICO D, et al. Computational Structural Analysis of Planar Multibody Systems with Lower and Higher Kinematic Pairs[J]. Mechanism and Machine Theory, 2014, 71(1): 79-92.
[11] DING Huafeng, HUANG Zhen, MU Dejun. Computer-Aided Structure Decomposition Theory of Kinematic Chains and Its Applications[J]. Mechanism and Machine Theory, 2008, 43(12): 1596-1609.
[12] DING Huafeng, HOU Fengmao, KECSKEMÉTHY A, et al. Synthesis of the Whole Family of Planar 1-DOF Kinematic Chains and Creation of Their Atlas Database[J]. Mechanism and Machine Theory, 2011, 47(4): 1-15.
[13] 曹文熬. 空间多环耦合机构数字化构型综合理论[D].秦皇岛:燕山大学,2014.
CAO Wenao. Digital Type Synthesis Theory of Spatial Multi-loop Coupling Mechanisms [D]. Qinhuangdao: Yanshan University, 2014.
[14] 廖明, 刘安心, 沈惠平,等. 并联机构方位特征集的符号推导方法[J]. 农业机械学报, 2016,47(3):395-404.
LIAO Ming, LIU Anxin, SHEN Huiping, et al. Symbolic Derivation of Position and Orientation Characteristics of Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 395-404.
[15] 廖明,刘安心,沈惠平,等. 面向计算机辅助分析的并联机构符号描述方法[J]. 农业机械学报, 2015,46(7): 310-317.
LIAO Ming, LIU Anxin, SHEN Huiping, et al. Symbolic Description of Parallel Mechanism for Automatic Derivation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 310-317.
AutomaticAnalysisandSynthesisMethodforGeometricAssemblyConditionsofMovingandFixedPlatformsBasedonVectorSets
XIE Dongfu1LUO Yufeng1,2SHI Zhixin1PENG Yanlan1
1.School of Mechanical and Electrical Engineering,Nanchang University,Nanchang,330031 2.School of Mechanical and Vehicular Engineering,East China Jiaotong University,Nanchang,330013
Based on the theory of position and orientation characteristics sets, an automatic analysis and synthesis method for geometric assembly conditions of moving and fixed platforms was proposed based on vector sets, and the main steps and flow charts were given. The example analyses show that the automatic analysis and synthesis method proposed in the processes of topology design of parallel mechanisms may synthesize more mechanisms, and the integrated mechanism is more general. In the processes of topology analysis and synthesis of parallel mechanisms, the proposed method reduces the dependence on designer’s human experiences, inspiration and other factors, improves the efficiency of topology synthesis of parallel mechanisms, and facilitates the automatic analysis and synthesis of mechanical systems by computer.
parallel robot; automatic analysis and synthesis; vector set; geometric assembly condition
2016-08-09
国家自然科学基金资助项目(51365036);南昌大学研究生创新专项基金资助项目(CX2015060)
TH112
10.3969/j.issn.1004-132X.2017.24.010
(编辑苏卫国)
谢冬福,男,1989年生。南昌大学机电工程学院博士研究生。主要研究方向为机器人机构学、智能农业设备。E-mail: xdfncu@163.com。罗玉峰,男,1960年生。南昌大学机电工程学院教授、博士研究生导师,华东交通大学机电与车辆工程学院教授、博士研究生导师。石志新(通信作者),男,1979年生。南昌大学机电工程学院副教授、硕士研究生导师。E-mail:shizhixin@ncu.edu.cn。彭艳蓝,女,1993年生。南昌大学机电工程学院硕士研究生。
