蹼翼型波浪滑翔机结构设计和运动原理分析
2017-12-29田宝强李玲珑
田宝强 李玲珑
1.江苏科技大学海洋装备研究院,镇江,2120032.中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳,1100163.中国船舶科学研究中心,无锡,214082
蹼翼型波浪滑翔机结构设计和运动原理分析
田宝强1,2李玲珑3
1.江苏科技大学海洋装备研究院,镇江,2120032.中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳,1100163.中国船舶科学研究中心,无锡,214082
在传统波浪滑翔机研究的基础上,通过柔性蹼翼的引入和结构设计,对蹼翼型波浪滑翔机的运动原理进行了深入研究,建立了柔性蹼翼驱动力计算模型,搭建了原理样机并初步通过了造波水槽实验,实现了蹼翼型波浪滑翔机的滑翔功能。蹼翼型波浪滑翔机克服了传统波浪滑翔机的结构复杂易缠绕、机动性差和波浪能转化效率低等不足,能更好地应用于大尺度、长期的海洋环境观测应用研究。
波浪滑翔机;柔性蹼翼;运动原理;海洋观测
0 引言
海洋环境观测是人类认识和了解海洋的重要手段,也是开发利用海洋资源的前提。随着海洋科学研究的不断深入,对海洋观测装备的要求也不断提高,一方面要求其具有很强的续航力,作业时间长,作业范围大,能完成大尺度的海洋数据的采集;另一方面要求其功能多样化,根据不同的研究需要采用不同的观测策略[1-2]。科学技术的发展也促进了海洋观测装备的自动化水平不断提高,并正向智能化、无人化方向发展,典型的海洋观测装备有载人潜器、自治水下机器人(autonomous underwater vehicle,AUV)、缆控水下机器人(remote operated vehicle,ROV)、水下滑翔机和波浪滑翔机等[3-4]。载人潜器和AUV的作业时间一般在数小时到数天时间,作业范围在数千米到数百千米不等,其运动可实现精确控制,主要用于水面和下层水体测量,使用成本较高;ROV需要的电能通过电缆由母船提供,作业时间可达到数月,作业范围受到电缆长度的制约,母船的采用大大增加了使用成本;水下滑翔机可实现数月、滑翔数千千米的水下水体测量,使用成本较低,同时,波浪滑翔机的作业时间可以达到数年,航行也可以达到数万千米,主要用于表层水体的测量,成本也较低,二者已成为重要的智能海洋观测装备之一。
波浪滑翔机的续航力(主要表现为作业时间和作业范围)要比其他观测装备高出两到三个量级,这与其采用海洋新能源(波浪能和太阳能)密切相关。虽然水下滑翔机的续航力也不弱,但是波浪滑翔机强大的传感器搭载能力,为体积和质量更大的传感器在海洋观测中的成功应用提供了可能,此外,波浪滑翔机的实时数据传输功能更有利于采集到准确和完整的海洋数据。
然而,波浪滑翔机的缺陷也是很明显的:一是其三体结构复杂,易发生缠绕事故;二是其波浪能转化吸收效率低,一般其波浪能转化和吸收效率不高于30%;三是其机动性差,水面的回转半径大约在50米左右[5],由此导致其不能很好地实现定点观测。本文在传统波浪滑翔机研究的基础上,通过柔性蹼翼的引入和结构设计,提出了蹼翼型波浪滑翔机实现方案[6],解决了现有的波浪滑翔机的上述问题,为完成更为复杂的海洋观测任务提供了平台支撑,具有更加广阔的应用前景。
1 传统波浪滑翔机研究现状
美国Liquid Robotics 公司的工程师Roger Hine于2005 年首先进行了波浪滑翔机的原理样机研究工作,并通过海试验证取得了很大的成功,这也是波浪滑翔机的最初概念[7]。目前,该公司的波浪滑翔机已经产品化,国内外很多研究机构基于该平台,通过搭载不同的传感设备进行海洋科学研究。主要工作有:水体和洋流的测量[8],海洋生物监测[9],海洋环境生态研究[10],海洋气象[11]等。波浪滑翔机在结构上由浮体、系缆和水下滑翔体三部分组成。浮体用于提供足够的浮力,并在波浪的激励下产生运动;系缆连接于浮体和水下滑翔体,不仅受到拉力作用,又能进行控制和通信;水下滑翔体是其动力部分,通过系缆拉动浮体在水面上运动[12-13],如图1所示。在已经完成的横穿太平洋的PACX活动中,波浪滑翔机打破了无人海洋机器人最远距离(12872 km)的世界记录[14],如图2所示。中国科学院沈阳自动化研究所[15]、哈尔滨工程大学[16]、国家海洋技术中心[17]等单位从水动力分析、动力学建模和效率优化等方面也进行了相关研究。
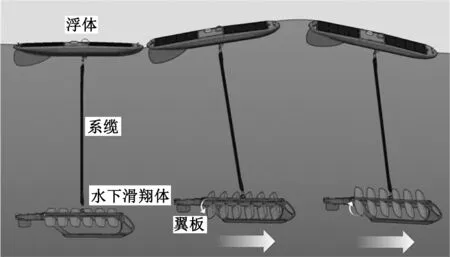
图1 波浪滑翔机结构和运动原理图Fig.1 Mechanical structure and motion principle of wave glider

图2 波浪滑翔机在PACX中的运动轨迹Fig.2 Trajectory of wave glider in PACX game
2 蹼翼型波浪滑翔机结构设计与运动原理
2.1 蹼翼型波浪滑翔机结构设计
为了克服传统波浪滑翔机的不足,蹼翼型波浪滑翔机在结构上与传统波浪滑翔机有很大差别,如图3所示。该机器人的柔性蹼翼通过其在水动力下的弹性变形来实现其波浪能转化和吸收,其运动参数对其波浪能转化和驱动效率均影响较大。

图3 蹼翼型波浪滑翔机外观图Fig.3 Schematic outline of WGWW
引入柔性蹼翼后的波浪滑翔机,与传统采用刚性翼板的波浪滑翔机相比具有以下突出优点:①柔性蹼翼能综合利用壳体的振荡、纵倾和横倾运动产生驱动力,从而提高波浪能的吸收(图4),而传统的波浪滑翔机的刚性翼板只有浮体的上下振荡对其驱动力产生贡献;②柔性蹼翼通过蹼翼连接件与壳体固连,壳体运动能实时传给蹼翼,其中通过“杠杆效应”能将壳体在波浪下的纵倾和横倾运动进行放大,增大蹼翼运动幅度,提高波浪能转化效率;③蹼翼引入使平台的结构变得更紧凑,有利于在浅水区域作业,同时舵机的水动力矩能直接作用于平台,从而提高了机动性,而传统波浪滑翔机舵机需要水下滑翔体(舵机装在水下滑翔体尾部,见图1)通过系缆拉动浮体一步步来实现。

图4 蹼翼型波浪滑翔机在不同运动状态下的蹼翼变形图Fig.4 Deformation of flexible webbed wing under different motion of MGWW
2.2 蹼翼型波浪滑翔机运动原理
蹼翼型波浪滑翔机主要通过柔性蹼翼来实现波浪能的吸收和驱动力的转化,其壳体在波浪的激励下会发生垂荡、纵倾、横倾等运动,这里先分析单一的垂荡运动。当波浪的波峰来临时,壳体受到波浪激励作用会发生上升运动,同时通过蹼翼连接件将柔性蹼翼拉起,柔性蹼翼上表面受到水流的作用而向下弯曲,这样水流就会和蹼翼的上表面形成一定的攻角α,蹼翼受到的水动升力L和阻力D的共同作用会产生一个向前的驱动力Fx,进而通过蹼翼连接件拉动该平台前进,如图5a所示;当波浪波谷来临时,整个平台随波浪在自身重力作用下下落,柔性蹼翼下表面在水流的作用下向上弯曲,这样水流就会和蹼翼的下表面形成一定的攻角α,蹼翼受到的水动升力L和阻力D的共同作用会产生一个向前的驱动力,进而通过蹼翼连接件拉动该平台前进,如图5b所示。所以,不管波峰还是波谷,柔性蹼翼都能产生一个向前的驱动力Fx,达到波浪能转化和利用的目的,而且该驱动力的方向与波浪的参数,以及波浪运动的方向没有关系。
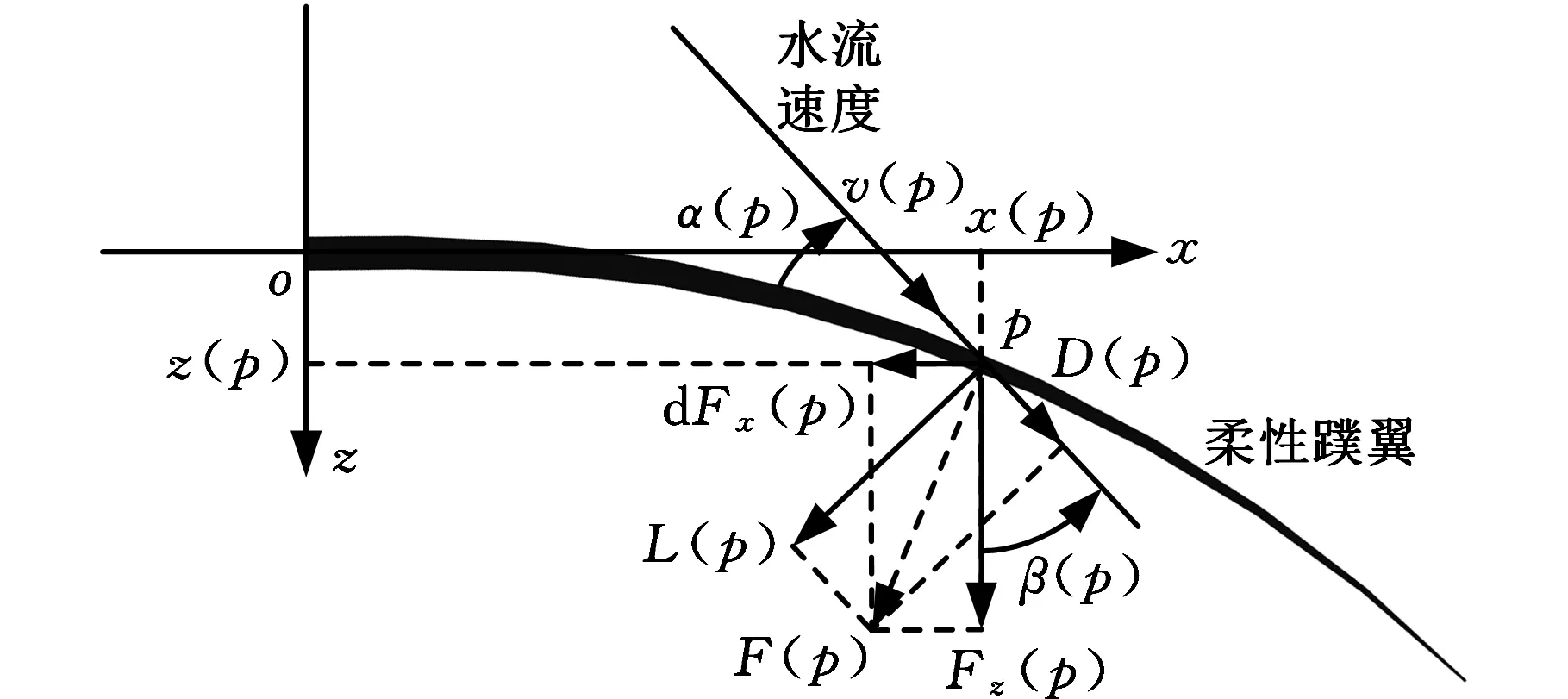
(a)柔性蹼翼向下弯曲
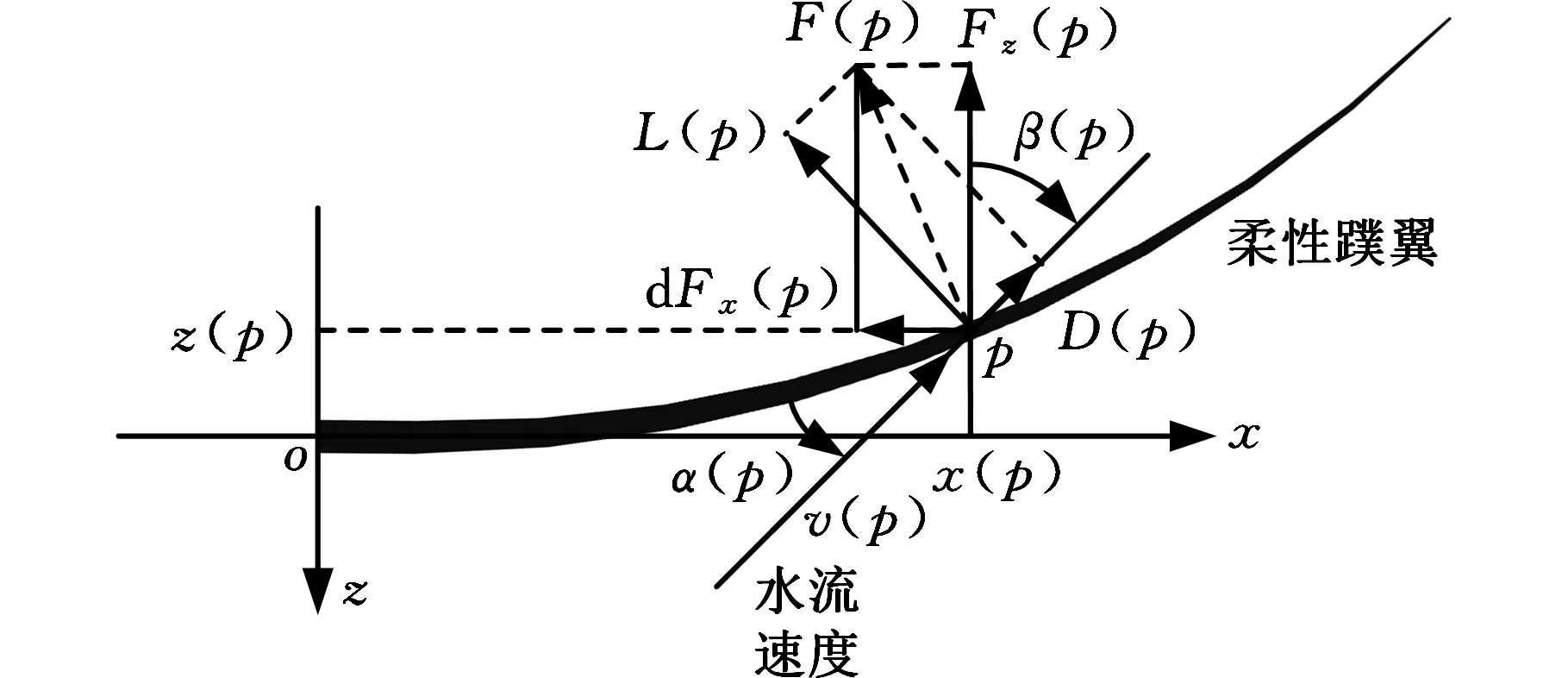
(b)柔性蹼翼向上弯曲图5 柔性蹼翼驱动力计算图Fig.5 Force analysis on flexible web bed wing
此外,与传统波浪滑翔机不同的是,蹼翼型波浪滑翔机当其壳体在波浪的激励下发生纵倾和横倾运动时,不管顺时针还是逆时针,其产生的驱动力也是始终向前的,与垂荡运动不同的是其柔性蹼翼的前后或两侧的运动变形状态刚好相反(参见图4),从而大大增加了波浪能的转化和吸收效率。
柔性蹼翼表面p点附近微元面积dS上水流速度为v(p),其受到的升力L(p)与水流速度的方向垂直,阻力D(p)与水流速度方向相同,二者可表示为[13]
L(p)=0.5ρv(p)2CL(p,α)dS
(1)
D(p)=0.5ρv(p)2CD(p,α)dS
(2)
式中,CL(p,α)和CD(p,α)分别为升力系数和阻力系数。
在该坐标系中,微元面积dS上驱动力dFx(p)可表示为
dFx(p)=D(p)sinβ+L(p)cosβ
(3)
整个柔性蹼翼上的驱动力Fx为微元面积dS上驱动力Fx(p)的曲面Σ上的面积分,可表示为
Fx=∬ΣFx(p)dS=∬Σ(D(p)sinβ+L(p)cosβ)dS
(4)
3 蹼翼型波浪滑翔机原理样机实验
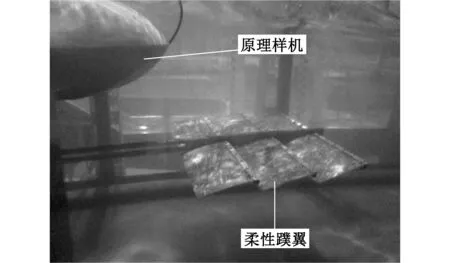
在完成蹼翼型波浪滑翔机结构设计和实现机理分析基础上,本团队完成蹼翼型波浪滑翔机原理样机的搭建,如图6a所示,并初步通过了造波水槽实验,如图6b所示,其柔性蹼翼的变形情况如图7所示。结合造波水槽条件,通过设定不同的波浪参数模拟了不同的海况条件,获得了该原理样机的速度如图8所示。

(a)蹼翼波浪滑翔机原理样机

(b)蹼翼波浪滑翔机水槽实验图6 蹼翼型波浪滑翔机原理样机和水槽实验Fig.6 Wave tank experiment of WGWW elementary prototype
(a)柔性蹼翼下翻

(b)柔性蹼翼上翻图7 蹼翼型波浪滑翔机柔性蹼翼在水槽实验中的变形情况Fig.7 Deformation of flexible webbed wing of MGWW in wave tank

图8 蹼翼型波浪滑翔机原理样机在水槽实验中在不同波高下运动速度Fig.8 Movement velocity of WGWW elementary prototype under different wave height in wave tank
蹼翼型波浪滑翔机是通过波浪能来获得驱动力的,波浪能是其运动的能量输入。由波浪理论可知,在一个波长的波动水体范围内,其所包含的波浪动能和波浪势能相等,一个波的总能量Ew为[18-19]

(5)
式中,H、λ分别为波浪波高、波长;g为重力加速度;ρ为海水密度。
式(5)表明波浪的能量与波高的二次方成正比,其大小主要由波高来决定。如图8所示,当设定波高从0.05 m增大到0.16 m时,蹼翼型波浪滑翔机原理样机的平均速度相应地从0.16 m/s增大到0.26 m/s。可见,当波浪的波高增大时,波浪能也随着变大,对原理样机系统的能量输入也增大,直接导致其运动速度增大,动能增大。通过该原理样机的水池实验,积累了大量的第一手资料,为后续理论分析和平台优化奠定了基础。
4 结语
目前,观测装备续航力和大面积海洋观测之间矛盾一直是制约观测装备大范围应用的瓶颈,利用海洋新能源来从事海洋研究已成为目前一个新的研究方向。蹼翼型波浪滑翔机具有较明确的应用需求和应用背景,本文通过柔性蹼翼的引入和结构设计,基于原理样机实验完成了蹼翼型波浪滑翔机驱动机理的分析。
[1] 张云海, 汪东平. 海洋环境移动平台观测技术发展趋势分析[J]. 海洋技术学报, 2015, 34(3): 26-32.
ZHANG Yunhai, WANG Dongping. Analysis on the Development Trend of Ocean Environment Observation Technologies Based on Marine Mobile Platforms[J] . Journal of Ocean Technology, 2015, 34(3): 26-32.
[2] 尹路, 李延斌, 马金钢. 海洋观测技术现状综述[J]. 舰船电子工程, 2013, 33(11): 4-7,13.
YIN Lu, LI Yanbin, MA Jingang. Present Status of Marine Observation Technology[J]. Ship Eiectronic Engineering, 2013, 33(11): 4-7,13.
[3] 陈质二, 俞建成, 张艾群. 面向海洋观测的长续航力移动自主观测平台发展现状与展望 [J]. 海洋技术学报, 2016,35(1):122-130.
CHEN Zhier, YU Jiancheng, ZHANG Aiqun. Overview on Observation-oriented Unmanned Marine Vehicles with High Cruising Ability: Development Status and Prospec[J]. Journal of Ocean Technology, 2016,35(1):122-130.
[4] 张洪欣, 马龙, 张丽婷, 等. 水下机器人在海洋观测领域的应用进展 [J]. 遥测遥控, 2015, 36(5): 23-27.
ZHANG Hongxin, MA Long, ZHANG Liting, et al. Application Development of Underwater Robot in the Field of Marine Observation [J]. Journal of Telemetry,Tracking and Command, 2015, 36(5): 23-27.
[5] MANLEY J, WILLCOX S. The Wave Glider: A Persistent Platform for Ocean Science[C]//Proceedings of the OCEANS 2010. Sydney, 2010: 1-5.
[6] 田宝强. 一种蹼翼型波浪能水下滑翔测量平台及测量方法: 中国,201610013788.9[P]. 2016-05-04.
TIAN Baoqiang. Web Wing Section Wave Energy Measuring Platform that Glides under Water: China, 201610013788.9[P]. 2016-05-04.
[7] HINE R, WILLCOX S, HINE G, et al. The Wave Glider: a Wave-powered Autonomous Marine Vehicle [C]//Proceedings of MTS/IEEE Oceans 2009. Biloxi, 2009: 1-6.
[8] MAQUEDA M, PENNA N, WILLIAMS S, et al. Water Surface Height Determination with a GPS Wave Glider: a Demonstration in Loch Ness, Scotland [J]. Journal of Atmospheric and Oceanic Technology, 2016, 33(6): 1159-1168.
[9] GUTBROD M, GREENE C, MCGARRY L. Wave Glider Technology for Fisheries Research New Integrated Instrumentation Expands the Fisheries Acoustics Toolbox[J]. Sea Technol., 2015, 56(12): 15-19.
[10] WILLCOX S, MEINIG C, SABINE C, et al. An Autonomous Mobile Platform for Underway Surface Carbon Measurements in Open-ocean and Coastal Waters[C]//Proceedings of the Proceedings of MTS/IEEE Oceans 2009 Conference. Biloxi, 2009:26-29.
[11] MITARAI S, MCWILLIAMS J. Wave Glider Observations of Surface Winds and Currents in the Core of Typhoon Danas [J]. Geophysical Research Letters, 2016, 43(21): 312-311.
[12] MANLEY J, WILLCOX S. The Wave Glider: a New Concept for Deploying Ocean Instrumentation[J]. IEEE Instru. Meas. Mag., 2010, 13(6): 8-13.
[13] 田宝强, 俞建成, 张艾群, 等. 波浪驱动无人水面机器人运动效率分析 [J]. 机器人, 2014, 36(1): 43-48,68.
TIAN Baoqiang, YU Jiancheng, ZHANG Aiqun, et al. Analysis on Movement Efficiency for Wave Driven Unmanned Surface Vehicle [J]. Robot, 2014, 36(1): 43-48,68.
[14] VILLAREAL T, WILSON C. A Comparison of the Pac-X Trans-pacific Wave Glider Data and Satellite Data (MODIS, Aquarius, TRMM and VIIRS)[J]. PLOS One, 2014, 9(3):e92280.
[15] TIAN Baoqiang, YU Jiancheng, ZHANG Aiqun. Dynamic Modeling of Wave Driven Unmanned Surface Vehicle in Lon-gitudinal Profile Based on D-H Approach [J]. Journal of Central South University, 2015, 22(12): 4578-4584.
[16] LIAO Y, WANG L, LI Y, et al. The Intelligent Control System and Experiments for an Unmanned Wave Glider [J]. PLOS One, 2016, 11(12): e0168792.
[17] JIA L, ZHANG X, QI Z, et al. Hydrodynamic Analysis of Submarine of the Wave Glider[J]. Advanced Materials Research, 2014, 834/836:1505-1511.
[18] 邱大洪.波浪理论及其在工程中的应用[M].北京:高等教育出版社,1985.
QIU Dahong. Wave Theory and Its Application in Engineering [M]. Beijing: Higher Education Press, 1985.
[19] 文圣常,宇宙文.波浪理论与计算原理[M].北京:科学出版社,1985.
WEN Shengchang, YU Zhouwen. Wave Theory and Calculation Principles[M]. Beijing: Science Press, 1985.
StructureDesignandMovementPrincipleofWaveGliderswithWebbedWings
TIAN Baoqiang1,2LI Linglong3
1.Marine Equipment and Technology Institute,Jiangsu University of Science and Technology,Zhenjiang,Jiangsu,212003 2.State key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang,110016 3.China Ship Science Research Center,Wuxi,Jiangsu,214082
Through the introduction to flexible webbed wings and structure design, the movement principle of wave gliders with webbed wings(WGWW) was studied,and its driving force calculation model of flexible webbed wings was set up, based on the traditional wave glider researches. Gliding function of WGWW was verified through the WGWW prototype constructed and pool experiments. WGWW may overcome the shortcomings of traditional wave gliders, such as complicated structures, weak maneuverability and low driving efficiency, so it may be better applied in large scale, and long-term ocean environmental observation researches.
wave glider; flexible webbed wing; movement principle; ocean observation
2017-03-23
机器人学国家重点实验室开放基金资助项目(2017-O06);江苏省自然科学基金资助项目(BK20170577)
TK79
10.3969/j.issn.1004-132X.2017.24.007
(编辑王艳丽)
田宝强,男,1984年生。江苏科技大学海洋装装备研究院助理研究员、博士。主要研究方向为新概念海洋机器人相关技术。发表论文7篇。授权专利5项。E-mail:tbqcas@126.com。李玲珑,男,1986年生。中国船舶科学研究中心深海载人装备国家重点实验室工程师。
