考虑边界约束的阀控阻尼可调半主动悬架显式混杂模型预测控制*
2017-12-26王宇吴光强郭炯珉
王宇 吴光强,2 郭炯珉
(1.同济大学,上海 201804;2.东京大学生产技术研究所,东京 153-8505)
考虑边界约束的阀控阻尼可调半主动悬架显式混杂模型预测控制*
王宇1吴光强1,2郭炯珉1
(1.同济大学,上海 201804;2.东京大学生产技术研究所,东京 153-8505)
针对阀控阻尼可调半主动悬架减振器输出阻尼力存在的边界约束,引入混合逻辑动态理论,建立半主动悬架混杂系统整车模型。确立半主动悬架模型预测控制的二次型目标函数,采用多参数规划技术显式求解半主动悬架混杂系统模型预测控制问题。在随机路面输入工况下进行仿真验证结果表明,阀控阻尼可调半主动悬架的显式混杂模型预测控制能在兼顾操纵稳定性的同时,有效改善车辆的乘坐舒适性。
1 前言
阀控阻尼可调半主动悬架因具有结构简单、响应迅速、安全可靠和易于实现等优点,成为近年来半主动悬架系统中的研究热点[1]。控制算法是阀控阻尼可调半主动悬架的核心技术之一,有较多的文献研究成果[2-9]。
如何处理阀控阻尼可调半主动悬架中减振器输出阻尼力存在的非线性约束是控制算法中的主要难点之一。一方面,阻尼可调减振器提供的阻尼力方向由悬架两端的相对运动速度方向决定;另一方面,阻尼可调减振器的输出阻尼力范围还和悬架两端的相对运动速度大小相关。整体而言,现有的控制算法一般考虑了前者,而鲜有从悬架两端的相对运动速度大小角度来考虑输出阻尼力所必须满足的边界约束。
为实现阀控阻尼可调半主动悬架的有效控制,本文结合7自由度半主动悬架整车模型,考虑阻尼可调减振器输出阻尼力的边界约束,引入混合逻辑动态理论,建立半主动悬架混杂系统整车模型,研究一种适用于阀控阻尼可调半主动悬架的显式混杂模型预测控制方法,以改善车辆的乘坐舒适性和操纵稳定性。
2 半主动悬架混杂系统整车模型的建立
2.1 阀控阻尼可调半主动悬架整车模型的建立
7自由度阀控阻尼可调半主动悬架整车模型如图1所示,忽略轮胎阻尼,并假定弹簧是线性的,车身为刚体,车身俯仰角和车身侧倾角均较小。
图1中,ZC、θ、φ分别为车身质心处的垂向位移、车身俯仰角和车身侧倾角,Zs1、Zs2、Zs3、Zs4分别为车身前左、前右、后左、后右处的垂向位移,Zu1、Zu2、Zu3、Zu4分别为4个簧下质量的垂向位移,Zg1、Zg2、Zg3、Zg3分别为4个车轮的垂向输入。此外,用mc、Iθ、Iφ分别表示车身质量、车身俯仰转动惯量和车身侧倾转动惯量,用mu1、mu2、mu3、mu4分别表示4个位置的簧下质量,用ks1、ks2、ks3、ks4分别表示4个悬架的垂向刚度系数,用kt1、kt2、kt3、kt4分别表示4个轮胎的垂向刚度系数,用u1、u2、u3、u4分别表示4个阻尼可调减振器输出的控制阻尼力,用la、lb分别表示车身质心到前后轴的距离,用2lf、2lr分别表示前后轴处左右侧车轮的轮距。
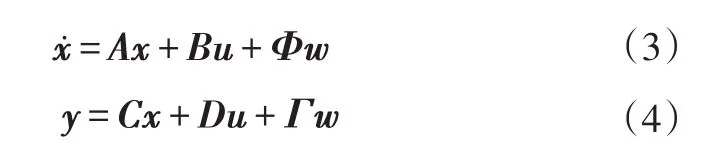
对半主动悬架整车模型中的车身和簧下质量进行受力分析,可得到如下动力学方程:


2.2 阀控阻尼可调半主动悬架非线性约束分析
从阀控阻尼可调半主动悬架的输出特性来看,减振器提供的阻尼力呈现出很强的非线性。图2绘制了根据减振器特性试验得到的阻尼特性曲线,其中,vd表示悬架两端的相对运动速度,且。
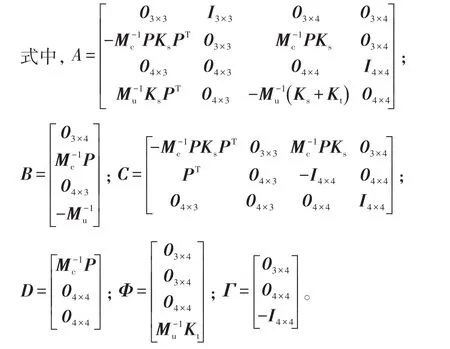
由图2可知,减振器提供的阻尼力范围跟悬架两端的相对运动速度大小直接相关。以最大控制电流1.6 A和最小控制电流0.29 A对应的阻尼力作为边界,减振器可输出的阻尼力区间随悬架两端的相对运动速度大小的变化而移动,即:
将图2中最大控制电流1.6 A和最小控制电流0.29 A的阻尼特性曲线进行分段线性拟合,可以得到:

各拟合参数值如表1所示。
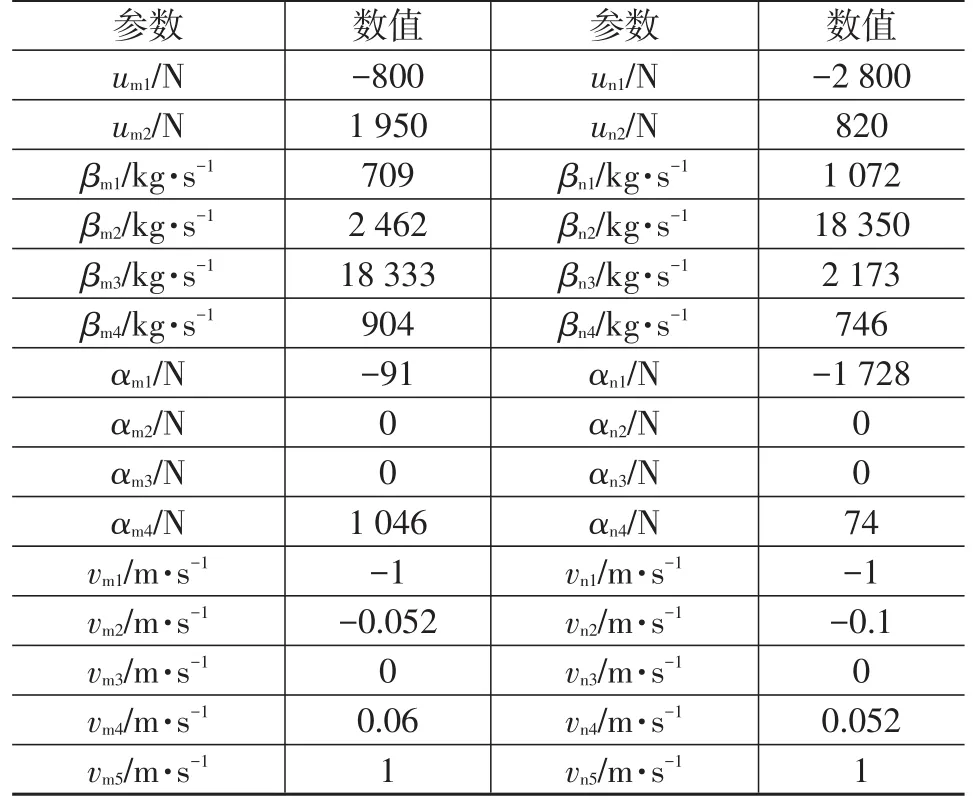
表1 拟合参数表
从式(5)~式(7)可以看出,随着悬架两端相对运动速度的变化,这些线性不等式在彼此间进行切换约束,这表明阀控阻尼可调半主动悬架的阻尼调节表现为连续动态行为与离散事件并存的混杂动态特性。
2.3 阀控阻尼可调半主动悬架混杂系统建模
针对阀控阻尼可调半主动悬架中的非线性约束问题,引入混合逻辑动态(Mixed Logical Dynamic,MLD)理论[10],考虑系统行为演变过程中的切换条件和边界约束,将状态方程和非线性约束转换为带有逻辑分量的MLD模型。

再引入连续辅助变量umaxij∈,uminij∈,i=1,2,…4,j=1,2,…,6,将式(6)和式(7)中的阻尼力边界约束转换为一系列约束组合,即:

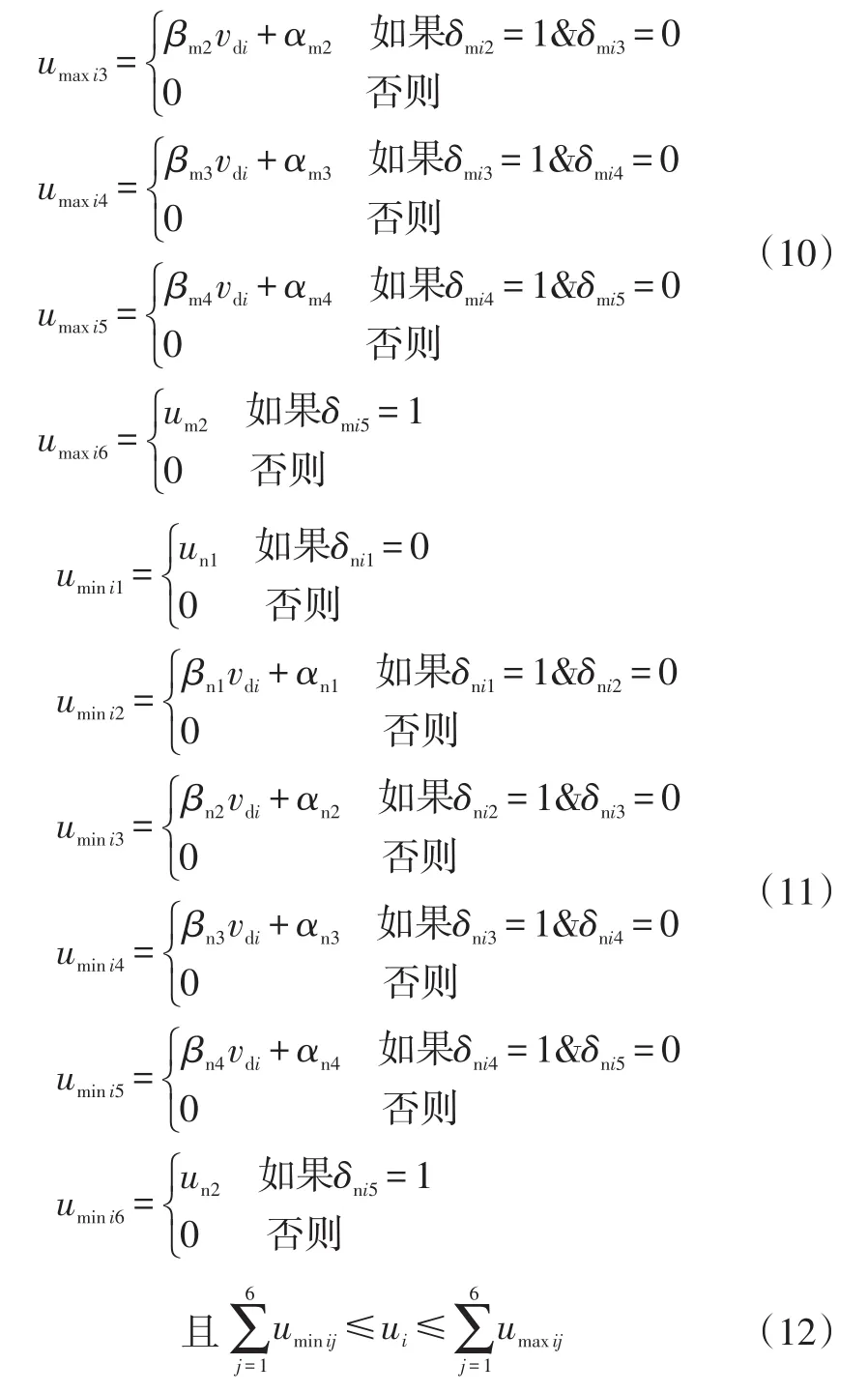
最后,根据MLD模型的建模方法,将系统方程(3)、(4)离散化[11],运用混杂系统描述语言(HYSDEL)建立包含离散化系统方程和约束条件(8)~(12)的混杂系统模型,并利用HYSDEL编译器把混杂系统模型转换为标准形式的MLD模型,即:
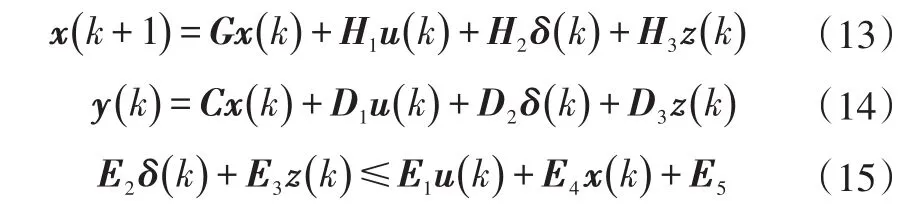

G、H1-3、C、D1-3及E1-5分别为相应的系数矩阵。
3 半主动悬架显式混杂模型预测控制研究
3.1 控制目标函数的建立
根据车辆乘坐舒适性和操纵稳定性对悬架的性能要求[12],定义如下阀控阻尼可调半主动悬架性能指标:

在衡量悬架综合性能时,一般希望式(16)越小越好。根据阀控阻尼可调半主动悬架混杂系统整车模型以及性能指标式(16),定义阀控阻尼可调半主动悬架模型预测控制的二次型目标函数为:

3.2 半主动悬架的显式混杂模型预测控制
结合式(13)~式(15)和式(17),阀控阻尼可调半主动悬架的混杂模型预测控制问题可表示为:

式(18)可视为一类混合整数二次规划问题(Mixed Integer Quadratic Program,MIQP)。将多参数规划技术运用于MIQP,即形成了多参数混合整数二次规划问题(Multi-parameter Mixed Integer Quadratic Program,mp-MIQP)。虽然在一些特殊情况下能够求解mp-MIQP,但目前来说还不存在求解mp-MIQP的一般性算法[[1133]]。
分段仿射(Piecewise Affine,PWA)系统模型是混杂系统模型中的一种。PWA模型包含有一系列的连续变量子系统,可直接利用多参数规划技术显式求解PWA系统的模型预测控制问题[13]。
由于离散时间PWA系统与MLD系统的等价性,因而可将阀控阻尼可调半主动悬架的MLD模型转换为如下离散时间PWA模型,即:
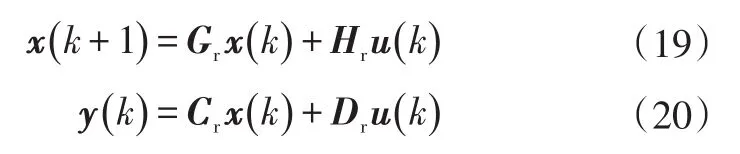
满足:

式中,Gr、Hr、Cr、Dr为相应的系数矩阵;Ωr为系统的状态与输入空间的多面体集,由一系列线性不等式表示。
当系统状态到达Ωr边界区域时,系统即在子系统间进行切换。
根据式(19)、式(20)可得:


式中,M、N、F、R、W、E分别为相应的系数矩阵。
S=E+RN-1F,代入式(23)中,同时省略式中常数项,可化简化成如下规范形式的多参数二次规划问题:
对应于上述非线性规划问题的卡罗需-库恩-塔克(Karush-Kuhn-Tucker,KKT)条件为:
式中,z∗表示多参数二次规划问题的最优解向量;λ∗表示相应的拉格朗日乘子向量,且λ∗中各元素非负。


式中,Re、We、Se对应有效约束组合。
结合式(25)、式(29)和z的定义,即可得到最优控制序列U关于系统状态x的显式表达:

此外,根据式(27)中的不等式约束和λ∗中各元素非负的要求,结合式(25)、式(29),还可得到:
通过消除式(31)和式(32)中的冗余不等式,便可得到对应于最优控制序列U的状态分区。在此基础上,根据类似的方法继续划分状态空间的剩余部分,确定每个系统状态分区所对应的最优控制序列。基于模型预测控制原理,取最优控制序列的首个元素作为悬架系统的控制量,从而得到阀控阻尼可调半主动悬架的显式混杂模型预测控制律,即:

满足:

式中,i=1,2,…,N,N表示状态分区的个数;Hi和Ki表示状态分区的不等式参数矩阵;Fi和Gi表示对应于状态分区的控制律显式表达参数矩阵。
4 仿真验证
在实现阀控阻尼可调半主动悬架显式混杂模型预测控制(Explicit Hybrid Model Predictive Control,EHMPC)的基础上,为验证实际控制性能,基于MATLAB/Simulink建立了半主动悬架EHMPC系统和被动悬架系统仿真模型,仿真模型相关参数设置如表2所示,其中,C1-4为4个被动悬架减振器的阻尼系数。
随机路面输入工况被广泛用于测试悬架系统的综合性能。为验证系统的控制效果,假定车辆以20 m/s的速度依次通过A、B、C、D四级路面,随机路面不平度输入采用如下滤波白噪声的时域表达式来描述:

式中,i=1,2,…,4;G0为路面不平度系数;vx为车辆行驶速度;wi(t)为数字期望为零的高斯白噪声;n00为下截止空间频率,n00=0.011 m-1;n0为空间参考频率,n0=0.1 m-1。
图3~图5给出了随机路面输入工况下车身性能参数均方根值的仿真对比结果。其中,车身质心垂直加速度Z¨c、车身俯仰角加速度θ¨c和车身侧倾角加速度φ¨c的最大改善幅度分别为18.6%、12.3%和14.1%,显著提升了车辆的乘坐舒适性。
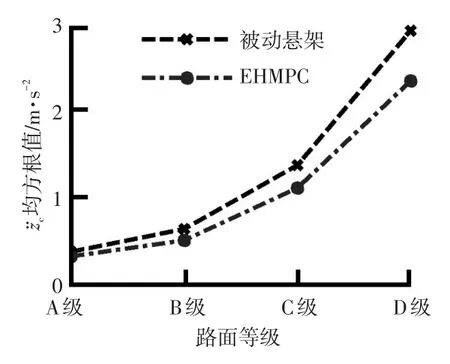
图3 车身质心垂直加速度均方根值

图4 车身俯仰角加速度均方根值
图6和图7给出了随机路面输入工况下的前左位置悬架部分性能参数的仿真对比结果。其中,前左悬架动行程的最大改善幅度达到8.34%,有效降低了悬架撞击限位块的概率;前左轮胎动载荷的最大恶化幅度为3.89%,保证了车辆操纵稳定性所受影响不大。
图8和图9分别为B级路面时车身质心垂直加速度和前左轮胎动载荷的功率谱密度曲线。可以看出,采用半主动悬架EHMPC控制后的车身质心垂直加速度功率谱密度幅值在两个共振频段均得到了有效衰减;而前左轮胎动载荷功率谱密度幅值虽在高频段有所增大,但在低频段却显著降低,综合而言控制效果优于被动悬架。
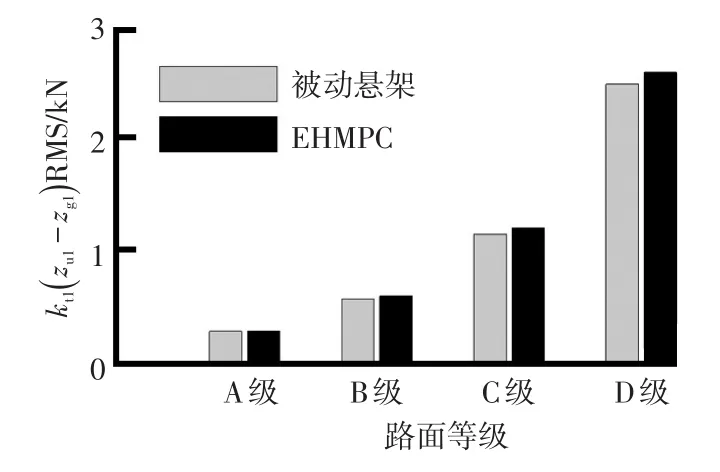
图7 前左轮胎动载荷均方根值
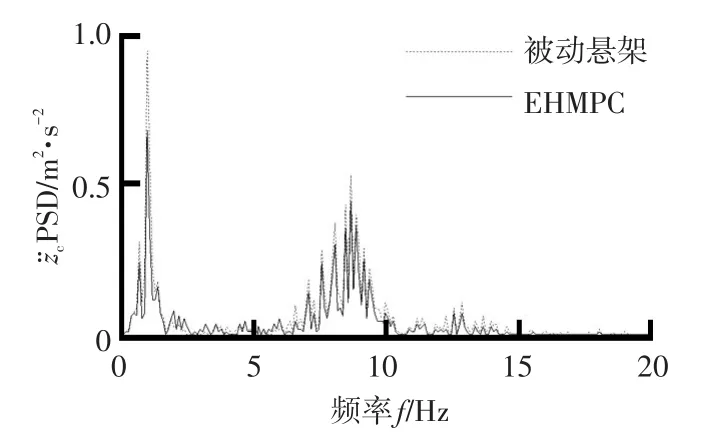
图8 车身质心垂直加速度功率谱密度
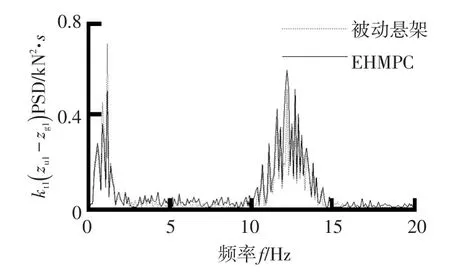
图9 前左轮胎动载荷功率谱密度
5 结束语
建立了7自由度阀控阻尼可调半主动悬架整车模型,分析了阻尼可调减振器输出阻尼力存在的非线性约束条件。引入二值逻辑辅助变量和连续辅助变量描述阻尼力边界约束,运用混杂系统描述语言建立半主动悬架混杂系统整车模型。确立阀控阻尼可调半主动悬架模型预测控制的二次型目标函数,利用多参数规划技术显式求解半主动悬架混杂系统模型预测控制问题。在随机路面输入工况下对阀控阻尼可调半主动悬架的显式混杂模型预测控制性能进行了仿真验证,结果表示,基于EHMPC的半主动悬架能在兼顾操纵稳定性的同时,有效改善车辆的乘坐舒适性。
1 Tseng H E,Hrovat D.State of the Art Survey:Active and Semi- Active Suspension Control. Vehicle System Dynamics,2015,53(7):1~29.
2 Karnopp D,Crosby M J,Harwood R A.Vibration Control Using Semi-Active force Generators.Journal of Engineering for Industry,1974,96(2):619~626.
3 Hong K S,Sohn H C,Hedrick J K.Modified Skyhook Control of Semi-Active Suspensions:a New Model,Gain Scheduling and Hardware-in-the-Loop Tuning.Journal of Dynamic Systems,Measurement,and Control,2002,124(1):158~167.
4 郭孔辉,王金珠,郭耀华,等.基于混合阻尼控制的车辆半主动悬架可调性研究.汽车技术,2013(3):1~5.
5 Silani E,Savaresi S M,Bittanti S.Acceleration-Driven-Damper(ADD):an Optimal Control Algorithm for Comfort-Oriented Semi-Active Suspensions.Journal of Dynamic Systems Measurement and Control,2005,27(2):218~230.
6 Unger A,Schimmack F,Lohmann B,et al.Application of LQ-Based Semi-Active Suspension Control in a Vehicle.Control Engineering Practice,2013,21(12):1841~1850.
7 Le H N,Hong K S,Park S.Road-Frequency Adaptive Control for Semi-Active Suspension Systems.International Journal of Control,Automation and Systems,2010,8(5):1029~1038.
8 Kurczyk S,Pawełczyk M.Fuzzy Control for Semi-Active Vehicle Suspension.Journal of Low Frequency Noise Vibration and Active Control,2013,32(3):217~226.
9 Assadsangabi B,Eghtesad M,Daneshmand F,et al.Hybrid Sliding Mode Control of Semi-Active Suspension Systems.Smart Materials and Structures,2009,18(12):406~414.
10 Bemporad A,Morari M.Control of Systems Integrating Logic,Dynamics,and Constraints.Automatica,1999,35(3):407~427.
11 Torrisi F D,Bemporad A.HYSDEL-a Tool for Generating Computational Hybrid Models for Analysis and Synthesis Problems. IEEE Transactions on Control Systems Technology,2004,12(2):235~249.
12 盛云,吴光强.7自由度主动悬架整车模型最优控制的研究.汽车技术,2007(6):12~16.
13 Borrelli F.Discrete Time Constrained Optimal Control:[dissertation]. Zurich: Swiss Federal Institute of Technology Zurich,2002.
Prediction Control of Explicit Expression Hybrid Model of Valve Controlled&Damping Adjustable Semi-Active Suspension Taking into Account of Boundary Constraint
Wang Yu1,Wu Guangqiang1,2,Guo Jiongmin1
(1.Tongji University,Shanghai,201804;2.Production Technology Research Institute,Tokyo University,153-8505)
To address the boundary constraint existing in output damping force from valve-controlled&damping adjustable semi-active suspension shock absorber,mixed logic dynamic theory was introduced,and a vehicle model with semi-active suspension hybrid system was established.The quadratic form objective function for semi-active suspension model prediction and control was defined.Multiple parameter planning technology was applied to explicitly solve the issues concerning the hybrid system model prediction and control.Simulation verification was conducted with random road input conditions,the results show that the explicit hybrid model predication technology can effectively improve vehicle riding comfort while the handling stability is ensured.
Semi-active suspension,Boundary constraint,Mixed logic dynamic model,Hybrid model predication control
半主动悬架 边界约束 混合逻辑动态模型 混杂模型预测控制
U461.4 文献标识码:A 文章编号:1000-3703(2017)12-0001-06
上海汽车工业科技发展基金项目(1526)。
(责任编辑帘 青)
修改稿收到日期为2017年11月1日。