A man-made object detection algorithm based on contour complexity evaluation
2017-12-22GuiliXUZhengingWANGYuehuCHENGYupengTIANChoZHANG
Guili XU,Zhenging WANG,Yuehu CHENG,Yupeng TIAN,Cho ZHANG
aCollege of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
bCollege of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
A man-made object detection algorithm based on contour complexity evaluation
Guili XUa,*,Zhengbing WANGa,Yuehua CHENGb,Yupeng TIANa,Chao ZHANGa
aCollege of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
bCollege of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
Complexity evaluation; Contour chain code; Contour detection; Man-made object detection; Salient contour
Man-made object detection is of great significance in both military and civil areas,such as search-and-rescue missions at sea,traf fic signs recognition during visual navigation,and targets location in a military strike.Contours of man-made objects usually consist of straight lines,corner points,and simple curves.Motivated by this observation,a man-made object detection method is proposed based on complexity evaluation of object contours.After salient contours which keep the crucial information of objects are accurately extracted using an improved mean-shift clustering algorithm,a novel approach is presented to evaluate the complexity of contours.By comparing the entropy values of contours before/after sampling and linear interpolation,it is easy to distinguish between man-made objects and natural ones according to the complexity of their contours.Experimental results show that the presented method can effectively detect man-made objects when compared to the existing ones.
1.Introduction
In military and civil areas,detecting man-made objects from input images with complex backgrounds is of great significance.For example,in the search-and-rescue mission of Malaysia Airlinesplanein March 2014,satellitesand helicopters spent months searching the crashed plane.Detect-ing the plane automatically in aerial images would save much time and manpower for rescue.
Man-made objects such as planes,vehicles,buildings,and traf fic signs are usually different from natural ones as follows:(1)Relative simplicity in color;(2)Smooth surface with regular texture;and(3)Contours consisting of straight lines,corner points,and smooth curves.A large body of work has been presented for man-made object detection1–4as well as other applications5based on these characteristics.Man-made objects are often identi fied and characterized by a small set of de fining curves,and thus,characteristic curves or contours can be used as building blocks to abstract shape descriptions of man-made objects.6Many approaches have also been proposed for detection of urban structures,including road networks7and buildings.8Speci fically,Michaelsen et al.2,3extracted extended building features including long thin roof edge lines,groups of salient point scatterers,and symmetric con figurations,and grouped them to detect man-made structures in highresolution SAR data.Phalke and Couloigner9proposed a building detection algorithm based on edge detection and geometric features.They extracted straight lines in an image to build a ‘line-endpoint” map,searched for closed contours on the map,and then compared the shape with target buildings to find a potential match.Fan et al.10proposed a generic approach for automated detection and classification of manmade objects in urban corridors from point clouds.The seed points of man-made objects are indicated by a line filter in the footprints of off-ground objects,which is generated by binarizing the spatial accumulation map of the point clouds.Banf and Blanz11presented a learning based algorithm to detect man-made structures in natural images using features including line patterns and corner point patterns.
Another group of methods to detect man-made objects is based on fractal properties because natural image features usually fit a fractional Brownian motion model while man-made objects do not.The concept of fractal dimension was first proposed in 1975,12and since then researchers have proposed many calculation methods for fractal dimension and applied them to detect man-made objects from complex natural scenery.13–15Pentland16used a fractal function to model 3D natural surfaces to distinguish between natural objects and manmade ones,and estimated the fractal dimension by the Fourier power spectrum.In Ref.17,a calculation method of ε-blanket was presented which greatly reduces the computational complexity.Peli18used a computationally efficient morphological filter to estimate the fractal signature and applied it to characterize man-made and natural objects from two-dimensional data.The fractal error metric19has been used as a more ef ficient measure of man-made features in recent years.20The fractal property is a good cue to characterize natural objects and man-made ones.However,it usually takes even dozens of seconds to calculate the fractal feature of an image with a million pixels,which cannot satisfy the requirement of practical applications.In some recent studies,shadow is regarded as one of the important clues for building reconstruction in satellite images.It has been used to detect man-made buildings21,22and assess damages caused by an earthquake.23
In this paper,we focus on the geometric features of manmade objects and present a novel man-made object detection algorithm.In most cases,contours of objects can provide more reliable descriptions compared to colors and textures.According to the observation that contours of man-made objects usually consist of straight lines,corner points,and simple curves,this paper presents a man-made object detection algorithm based on contour complexity evaluation.We first use the improved mean-shift clustering algorithm to extract salient contours from complex background.Then a contour sampling and linear interpolation process is implemented.We include all the corner points in the sampling points set to retain the structure information of objects.Finally,we introduce a novel index to evaluate contour complexity.By comparing the entropy values of contours before/after sampling and linear interpolation,we distinguish between man-made objects and natural ones.Experimental results demonstrate that the presented method can better detect man-made objects from visible and infrared images with remarkable improvement in real-time performance.
The main contributions of this paper are threefold.(1)We devise a new man-made object detection model to detect manmade objects from an input image.(2)An improved meanshift clustering algorithm for image preprocessing is presented to improve the speed and accuracy performances.(3)We introduce a novel index to evaluate contour complexity which is proven to be effective in man-made object detection.
The rest of this paper is organized as follows.Section 2 describes the details of our algorithm.In Section 3,experimental results are analyzed.Conclusions are drawn in Section 4.
2.Proposed approach
Fig.1 shows the contours before/after sampling and linear interpolation of several typical objects,where d is the sampling interval which denotes the number of pixels between two adjacent samples along a contour.Contours of man-made objects(plane and spire)mainly consist of straight lines,corner points,and simple curves.However,contours of natural objects(island and horse)are usually composed of complex curves and multiple corner points.We sample from the original contours with three different intervals and implement the linear interpolation.Compared to contours of natural objects,contours of man-made ones change less with different sampling intervals.The presented method argues that by quantifying this property,we can distinguish between man-made objects with simple contours and natural ones.
The presented method consists of three steps.Firstly,we implement the improved mean-shift clustering algorithm for image preprocessing to remove textures and noises in an input image.Then,we extract salient contours from the input image,and sample from the extracted contours.We develop a new contour sampling method to retain the structure information of the salient contours.Finally,we design a contour complexity evaluation index to evaluate the contours before/after sampling and linear interpolation,and extract the simple contours as the contours of man-made objects.The pipeline of the presented method is shown in Fig.2.
2.1.Image preprocessing
The presented method is based on complexity evaluation of salient contours of objects.To obtain clean contours,the mean-shift clustering algorithm24is used to remove textures and noises from an input image.The clustering center mh(x)and the convergence condition of original mean-shift clustering are as follows:
where G(·)is the kernel function,and w(xi)is the weight of pixel xi.h is the bandwidth of kernel function,and ε is a small constant that controls the iteration times.We set ε to 0.01 in our experiment.
To improve the speed and accuracy of the original clustering algorithm,we present to estimate the rough locations of salient contours in the input image as shown in Fig.3(a),which can be used to guide the clustering process.We calculate the entropy value at each position of the input image to form a texture map as shown in Fig.3(b).The entropy value has been proven to be a good cue for texture modeling.A low value tends to indicate a visually smooth area,such as the inner part of an object,while a high value may indicate a variation in the gray scale,such as contours and background textures.Thus,both the inner parts of objects and texture regions of the input image result in homogenous regions in the texture image,and the edges detected from the texture image tend to indicate the rough locations of salient contours rather than textures or noises in the input image.We use the detected edges to improve the original mean-shift clustering algorithm.As shown in Fig.3(c),a region of interest is selected from Fig.3(b).Assume that line 1 denotes a detected edge in the texture map,and the corresponding salient contour in the input image is estimated in the area close to line 1.We set a proper initial size for the sampling window(e.g.,square 4)to smooth textures and noises,and reduce the size of the sampling window(e.g.,square 5)when implementing the clustering algorithm in the area close to line 1 to accurately keep the information around the salient contour in the input image.Specifically,we set the size of the sampling window dsas
where pedenotes the pixel in the input image corresponding to the detected edge point(e.g.,point in line 1 in Fig.3(c))in the texture image and W denotes all the pixels included in the sampling window with the initial size D.When implementing mean-shift clustering,we firstly collect pixels in the sampling window with the initial size to form W.If peis included in W,which means that there may be salient contours near the clustering center,then we adopt a smaller sampling window with the size deto exactly retain salient contours in the input image.Specifically,we set D to 11 and deto 5 in our experiment.In order to speed up the mean-shift clustering algorithm,we also use different kernel functions during the clustering process.The Gaussian kernel Gg(x)is used when implementing the clustering algorithm in the areas near the detected edges,while the uniform kernel Gu(x)is used in others,which means that it accurately retains the salient contour but quickly smooths the textures.Fig.3(d)shows the clustering image of Fig.3(a)using the presented method.
2.2.Contour sampling with structure information
The initial idea is to distinguish between man-made objects and natural ones according to the complexity of their contours.Specifically,we evaluate the complexity of a contour line by comparing its entropy values before/after contour sampling and linear interpolation.Contours of natural objects usually contain much more details,which results in a significant difference between entropy values before/after sampling and linear interpolation.However,the variations of a contour structure may also contribute to the difference between entropy values.Fig.4(a)shows a shape image,and its original shape contour is presented in Fig.4(b).As shown in Fig.4(c),given a large sampling interval(30 pixels),there are obvious changes in the structure of the contour after linear interpolation which would increase the complexity as well as the difference between entropy values.
To solve this problem,we develop a contour sampling method to retain structure information.Corner points25or curvature extreme points26,27have been considered to carry crucial information of contours of objects.We therefore include corner points in the sampling points set to retain structure information of original contours.The specific steps are as follows.
Step 1.Use Canny operator to locate edges in the preprocessed image,and group them to form continuous contour segments using edge linking tools in Ref.28Denote the points set on a contour segment as
Step 2.Implement the CSS(curvature scale space)algorithm29to detect all the corner points on the contour segment. The corner points set is denoted as
Step 3.Sample from the contour segment.The sampling points set is denoted aswhere d is the sampling interval,and θ denotes the number of sampling points.To retain the complete contour structure,we add corner points and starting/end points into the sampling points set
The result of interpolation using the sampling points set Psis shown in Fig.4(d).Compared to the interpolation result shown in Fig.4(d)which includes all the corner points of the contours,the interpolation result in Fig.4(c)tends to be distorted around the corner points,and these undesirable distortions may contribute to the difference between entropy values.However,the improved sampling/interpolation can completely retain the structure information of contours and therefore promote a more reliable complexity evaluation.
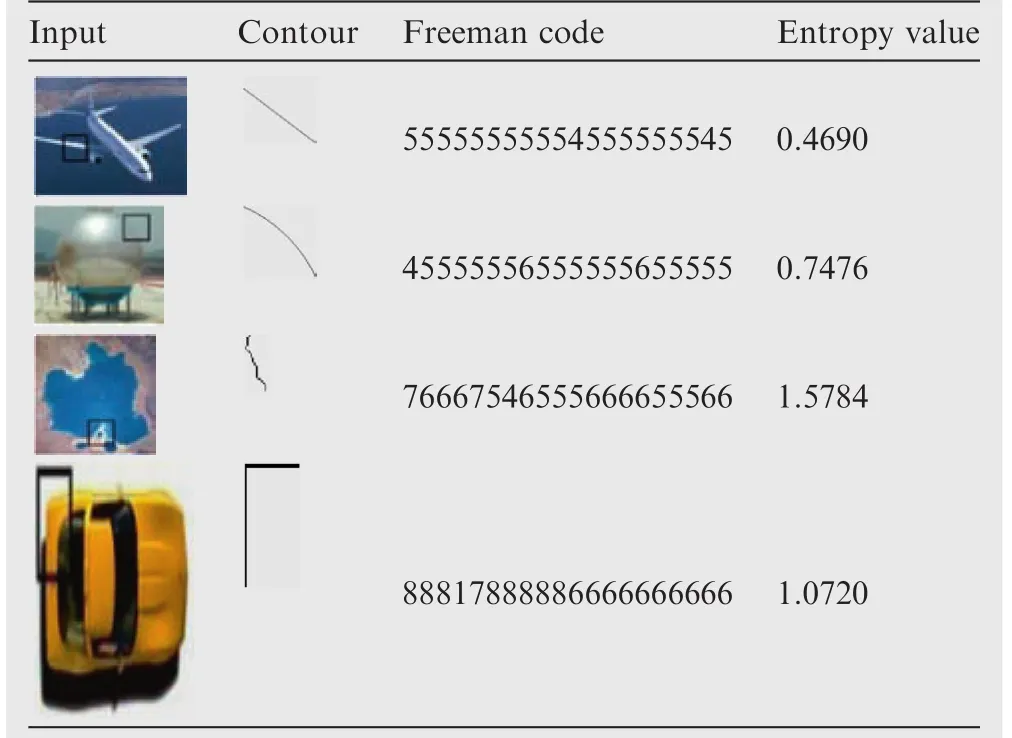
Table 1 Entropy values of several typical contour segments.
2.3.Contour complexity evaluation
Linear interpolation can remove the details on contours of natural objects,but has no influence on contours of man-made objects.According on this observation,we present a novel approach to evaluate the complexity of a contour based on the entropy value of its Freeman code.As the details on contours of natural objects are removed by linear interpolation,the entropy values are more likely to be different before/after interpolation.

Table 2 Complexity indices of selected contour segments in Fig.6.
A Freeman code uses a starting point and a set of codes which indicate the relative positions of adjacent points to describe a contour.For example,using the eight-direction Freeman code in Fig.5(a),the code for the contour in Fig.5(b)is 45468182.
Given a Freeman code of a contour,the corresponding entropy value Elis given by
where Piis the probability of direction i,i∈ {1,2,...,8}.Piis calculated as ni/N,in which N is the length of the Freeman code and niis the number of direction i in the Freeman code.Using Eq.(4)to calculate the entropy values of several typical contour segments of the same length,the results are given in Table 1.
As shown in Table 1,the entropy values of regular contour segments are generally smaller than those of irregular ones.However,it is vulnerable to distinguish between man-made objects and natural objects according to entropy values of their contours.As shown in the last row of Table 1,the contour segment of a car achieves a high entropy value compared with those of contour segments from other man-made objects,which indicates that entropy values tend to increase with the number of corner points included in contour segments.
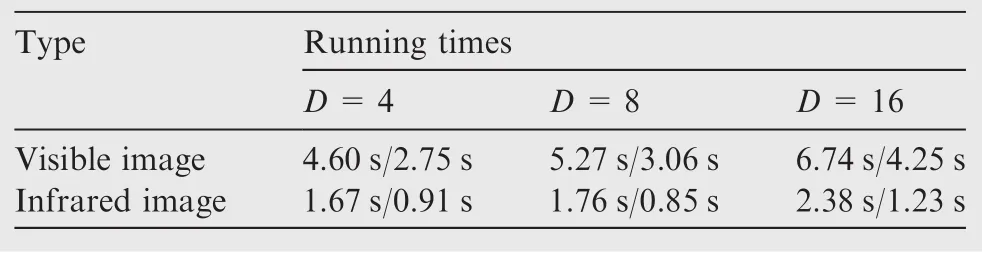
Table 3 Running times of mean-shift algorithm/presented method.
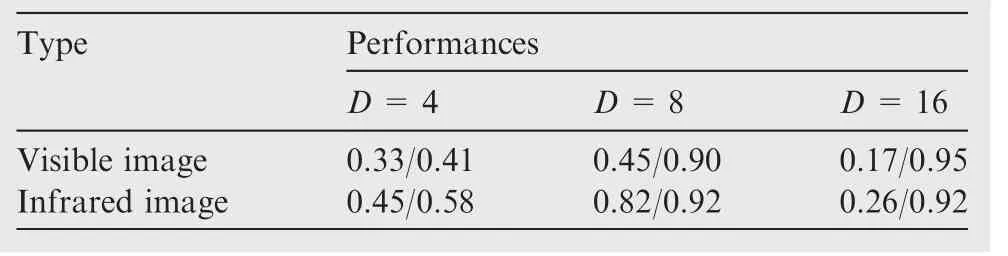
Table 4 Performances of mean-shift algorithm/presented method.
Fig.6 shows the variation of entropy values Elwith an increase of the sampling interval d,in which the horizontal axis represents the sampling interval.For a given contour segment,we compute its entropy values with different sampling intervals.As the sampling interval increases from 1 pixel to 30 pixels,the entropy values of irregular contour segments(island and horse)decrease rapidly while the entropy values of regular ones(plane and spire)almost remain constant.While it’s undesirable to directly distinguish between man-made objects and natural objects according to the entropy values of their contours,the variation of entropy values before/after interpolation tends to be a more stable index.We therefore de fine the index of contour complexity as
where E1(d=i)denotes the entropy value of a contour with the sampling interval d=i.
Taking d equal to 30 pixels for example,the ratios of entropy values corresponding to the selected contour segments in Fig.6 are given in Table 2.Man-made objects with regular contours are quite different from the natural ones on the complexity index.Contour segments with a high Teclose to 1 are more likely to belong to man-made objects.Note that this evaluation index is a category-independent indicator and it’s only related to the complexity of contours.Thus,it can be applied to detect a large variety of man-made objects with multiple corner points.To detect man-made objects,we need to set a threshold for Teto extract contour segments of man-made ones.Since the values of the complexity index are quite different between man-made objects and natural ones,we can learn a threshold from a training set which contains both man-made objects and natural ones.
3.Experimental results and analysis
In this section,we evaluate each component of the presented method.We evaluate the improved mean-shift clustering algorithm on both visible and infrared images,and compare our algorithm with the original mean-shift clustering algorithm on operational speed and accuracy.To evaluate the presented man-made object detection algorithm,we collect 50 images which generally contain man-made and natural objects.We annotate both the contours and the binary region masks for man-made objects in each image as shown in Fig.7.
For contour-based detection methods(e.g.,the Phalke method9and ours),we evaluate the algorithm using the fraction of false positives eFP,the fraction of false negatives eFN,and the performance measure P introduced in Ref.30as shown below:
where E,EFP,and EFNdenote the sets of correctly detected contour pixels,false positives,and false negatives,respectively.EGTis the set of contour pixels of the binary ground truth,and card(S)denotes the number of elements of the set S.For region-based detection methods(e.g.,the Cooper method19),we segment an output image using an adaptive threshold obtained by Ref.31,and compare the segmentation result with the ground truth to compute the precision and recall.

Table 5 Quantitative comparison between the evaluated methods.
3.1.Evaluation of the improved mean-shift clustering algorithm
Fig.8 shows the performances on both visible and infrared images using the mean-shift clustering algorithm as well as the improved one,from which we can find that both of the two clustering methods detect salient edges with textures and noises with a too small initial sampling window(D=4),but the presented one can retain salient edges while filter out textures and noises with an appropriate large window,and therefore achieves a better performance.As shown in Fig.8(b)and(f),although the edges detected in the texture image are somewhat deviated from the real contours in the input image,it helps to estimate the locations of the real contours.The running times of the mean-shift clustering algorithm and the presented one are given in Table 3,which indicates that the presented clustering method is far more effective than the original mean-shift clustering algorithm.The performance measure of each edge detection result calculated by Eq.(8)is presented in Table 4,from which we can find that the presented clustering method can achieve a much higher accuracy.
3.2.Evaluation of the man-made object detection algorithm
To evaluate the proposed man-made object detection algorithm,we compare our method with previous ones based on the geometric feature9and the fractal feature.19We compare their performances on the collected 50 images with pixel-wise labeled ground truth for man-made objects.
A quantitative comparison between these methods is shown in Table 5.We note that the proposed algorithm achieves good performance against the other state-of-the-art methods.Fig.9 shows some qualitative detection results of man-made objects.Rows 2 and 5 show infrared images,and the rest are visible images.
Take the Row 3 images for example.Man-made objects include a warship and a harbor but the cloud is a natural object.Fig.10 shows the variations of entropy values of several contour segments with an increase of the sampling interval d.The values of complexity index of the marked contour segments are given in Table 6,from which we can find that the values of complexity index are quite different between the irregular contour segments and the regular ones.It’s therefore effortless to remove them as natural objects.
For man-made objects with a simple structure shown in the first two rows in Fig.9,all the three methods achieve good performance.The Phalke method extracts lines in an image to detect man-made objects such as buildings,but it fails to detect man-made objects with multiple corner points which may restrict its application.The Cooper method extracts fractal error features which is commonly used in man-made object detection tasks,but its performance is usually vulnerable to the contrast and resolution of an input image.It may emphasize natural objects instead of man-made ones.Nevertheless,the presented method is not affected by the above factors,and can achieve good performance in most cases.
3.3.Limitation and failure cases
Note that the presented man-made object detection method is implemented on the results of contour extraction.Fig.11 shows some failure cases of the presented method.If thecontours of objects are undetected(e.g., first column in Fig.11)or incorrectly grouped(e.g.,second column in Fig.11),extra false negatives or positives may be included in the detection result.Additionally,the presented method may also identify some regular contour segments of natural objects incorrectly(e.g.,third column in Fig.11).

Table 6 Complexity indices of selected contour segments in Fig.10.
To evaluate the sensitivity of the presented method to contour noises,we add different-level noises to the original contour of a man-made object and compute the values of complexity index.The results are presented in Fig.12.The value of complexity index tends to decrease slowly with an increase of the noise level,which indicates that the presented method is less sensitive to the influence of contour noises.However,as shown in Fig.12(b3)and(b4),a contour with a higher-level noise achieves a higher value of complexity index,which indicates that a high-level noise may have a negative influence on the stability of the presented method.The interpolation results of Fig.12(b3)and(b4)are respectively shown in Fig.12(c)and(d).The corner detection algorithm tends to detect more corner points incorrectly with a higher-level contour noise,and the interpolation result retains not only the structure information but the contour noise.Therefore,the variation between entropy values before/after interpolation may become smaller,which results in a high value of complexity index.
4.Conclusions
(1)On the basis of the original mean-shift clustering algorithm,we present to adapt the sampling window as well as the kernel function according to the rough locations of salient contours.The presented method substantially improves the speed and accuracy of the original clustering algorithm.
(2)To make a fair comparison between the entropy values of contours before/after sampling and linear interpolation,the corner points on the contours should be included in the sampling points set to retain the main structure information of the contours.
(3)Based on the observation that the contours of man-made objects consist of straight lines,corner points,and simple curves,a novel man-made object detection method based on contour complexity evaluation is presented.
(4)Experimental results demonstrate the effectiveness of the presented algorithm.
Acknowledgements
This study was co-supported by the National Natural Science Foundation of China(61473148)and the Funding of Jiangsu Innovation Program for Graduate Education (No.KYLX16_0337).
1.Gruen A,Emmanuel B,Henricsson O.Automatic extraction of man-made objects from aerial and space images(II).Switzerland:Birkhäuser;2012.
2.Michaelsen E,Soergel U,Thoennessen U.Perceptual grouping for automatic detection of man-made structures in high-resolution SAR data.Pattern Recogn Lett 2006;27(4):218–25.
3.Michaelsen E,Stilla U,Soergel U,Doktorski L.Extraction of building polygons from SAR images:Grouping and decision-level in the GESTALT system.Pattern Recogn Lett 2010;31(10):1071–6.
4.Li Z,Shi W,Wang Q,Miao Z.Extracting man-made objects from high spatial resolution remote sensing images via fast level set evolutions.IEEE Trans Geosci Remote Sens 2015;53(2):883–99.
5.Han J,Pauwels EJ,De Zeeuw P.Visible and infrared image registration in man-made environments employing hybrid visual features.Pattern Recogn Lett 2013;34(1):42–51.
6.Mehra R,Zhou Q,Long J,Sheffer A,Gooch A,Mitra NJ.Abstraction of man-made shapes.ACM Trans Graph 2009;28(5):137–47.
7.Tupin F,Maitre H,Mangin JF,Nicolas JM,Pechersky E.Detection of linear features in SAR images:Application to road network extraction.IEEE Trans Geosci Remote Sens 1998;36(2):434–53.
8.Michaelsen E,Soergel U,Stilla U.Grouping salient scatterers in InSAR data for recognition of industrial buildings.Proceedings of the 16th international conference on pattern recognition;2013.p.613–6.
9.Phalke SM,Couloigner I.Change detection of linear man-made objects using feature extraction technique.Int Arch Photogramm,Remote Sens Spat Inform Sci 2005;36(Part 8):W27.
10.Fan H,Yao W,Tang L.Identifying man-made objects along urban road corridors from mobile LiDAR data.IEEE Geosci Remote Sens Lett 2014;11(5):950–4.
11.Banf M,Blanz V.Man made structure detection and verification of object recognition in images for the visually impaired.Proceedings of the 6th international conference on computer vision/computer graphics collaboration techniques and applications;2013 Jun 6–7;Berlin.New York:ACM;2013.p.1–8.
12.Mandelbrot BB.Stochastic models for the Earth’s relief,the shape and the fractal dimension of the coastlines,and the number-area rule for islands.Proc Natl Acad Sci 1975;72(10):3825–8.
13.Zhang H,Liu X,Li J,Zhu Z.The study of detecting for IR weak and small targets based on fractal features.International conference on multimedia modeling;2007 Jan 9–12;Singapore.Berlin:Springer;2007.p.296–303.
14.Sun YQ,Tian JW,Liu J.Dim small targets detection based on dualband infrared image fusion.Proceedings of international conference on industrial technology;2006 Dec 15–17;Piscataway(NJ):IEEE Press;2006.p.3003–7.
15.Liu J,Wei H.Optimal selection of fractal features for man-made object detection from infrared imagesProceedings of the 2nd international Asia conference on informatics in control,automation and robotics;2010 Mar 6–7.Wuhan:IEEE;2010.p.177–80.
16.Pentland AP.Fractal-based description of natural scenes.IEEE Trans Pattern Anal Mach Intell 1984;6(6):661–74.
17.Peleg S,Naor J,Hartley R,Avnir D.Multiple resolution texture analysis and classification.IEEE Trans Pattern Anal Mach Intell 1984;6(4):518–23.
18.Peli T.Multiscale fractal theory and object characterization.J Opt Soc Am A 1990;7(6):1101–12.
19.Cooper BE,Chenoweth DL,Selvage JE.Fractal error for detecting man-made features in aerial images.Electron Lett 1994;30(7):554–5.
20.Cao G,Yang X,Mao Z.A two-stage level set evolution scheme for man-made objects detection in aerial images.Proceedings of conference on computer vision and pattern recognition;2005 Jun 20–25;Piscataway(NJ):IEEE Press;2005.p.474–9.
21.Elbakary MI,Iftekharuddin KM.Shadow detection of man-made buildings in high-resolution panchromatic satellite images.IEEE Trans Geosci Remote Sens 2014;52(9):5374–86.
22.Ok AO,Senaras C,Yuksel B.Automated detection of arbitrarily shaped buildings in complex environments from monocular VHR optical satellite imagery.IEEE Trans Geosci Remote Sens 2013;51(3):1701–17.
23.Tong X,Lin X,Feng T,Xie H,Liu S,Hong Z,et al.Use of shadows for detection of earthquake-induced collapsed buildings in high-resolution satellite imagery.ISPRS J Photogramm Remote Sens 2013;79:53–67.
24.Cheng Y.Mean shift,mode seeking,and clustering.IEEE Trans Pattern Anal Mach Intell 1995;17(8):790–9.
25.Pedrosa GV,Batista MA,Barcelos CAZ.Image feature descriptor based on shape salience points.Neurocomputing 2013;120:156–63.
26.Fan H,Cong Y,Tang Y.Object detection based on scale-invariant partial shape matching.Mach Vision Appl 2015;26(6):711–21.
27.Jin DH,Liu XW,Zhao WG,Gui XM.Optimization of end wall contouring in axial compressor S-shaped ducts.Chin J Aeronaut 2015;28(4):1076–86.
28.Kovesi PD.MATLAB and Octave functions for computer vision and image processing[Internet].Perth:Centre for Exploration Targeting,School of Earth and Environment,the University of Western Australia.Available from:http://www.csse.uwa.edu.au/~pk/research/matlabfns/.
29.He XC,Yung NHC.Curvature scale space corner detector with adaptive threshold and dynamic region of supportProceedings of international conference on pattern recognition.2004.p.791–4.
30.Grigorescu C,Petkov N,Westenberg MA.Contour detection based on nonclassical receptive field inhibition.IEEE Trans Image Process 2003;12(7):729–39.
31.Otsu N.A threshold selection method from gray-level histograms.Automatica 1975;11(285–296):23–7.
24 November 2016;revised 10 February 2017;accepted 17 March 2017
Available online 9 September 2017
Ⓒ2017 Chinese Society of Aeronautics and Astronautics.Production and hosting by Elsevier Ltd.This is an open access article under the CCBY-NC-ND license(http://creativecommons.org/licenses/by-nc-nd/4.0/).
*Corresponding author.
E-mail address:guilixu@nuaa.edu.cn(G.XU).
Peer review under responsibility of Editorial Committee of CJA.
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- A general method for closed-loop inverse simulation of helicopter maneuver flight
- Numerical simulation of a cabin ventilation subsystem in a space station oriented real-time system
- Parametric analyses on dynamic stall control of rotor airfoil via synthetic jet
- Effect of particle size and oxygen content on ignition and combustion of aluminum particles
- Effects of axial gap and nozzle distribution on aerodynamic forces of a supersonic partial-admission turbine
- Effect of a transverse plasma jet on a shock wave induced by a ramp