不同长度基线的电离层处理策略
2017-12-19满小三
周 颖,满小三,李 郴
(1.61287部队,云南 昆明 650033;2.信息工程大学,河南 郑州 450001; 3.中铁四局五公司,江西 九江 332000 )
不同长度基线的电离层处理策略
周 颖1,满小三2,李 郴3
(1.61287部队,云南 昆明 650033;2.信息工程大学,河南 郑州 450001; 3.中铁四局五公司,江西 九江 332000 )
针对不同长度的基线,受双差之后电离层延迟影响不同,提出一种新的电离层处理策略。对短、中、长基线处理分别采用3种不同的数学模型:电离层固定模型,电离层加权模型,电离层浮点模型。通过3组不同长度基线实测数据处理表明,对应不同长度的基线,文中策略可以有效地提高模糊度固定率及定位精度。
电离层固定模型;电离层加权模型;电离层浮点模型;模糊度固定率
载波相位相对定位采用两台及以上的接收机进行同步观测,获取基线两端测站同步的载波相位观测值,通过组单差、双差的方法,消除大部分误差,求取载波相位观测值的整周模糊度,从而获取高精度的测量距离,使相对定位的精度可以达到厘米级至毫米级[1-4]。
对于不同长度的基线,双差之后大气延迟误差的消除程度也是不一样的,即载波相位相对定位的数学模型也不一样。如果没有采取正确的数学模型,将会导致模糊度难以固定,定位精度低。因此,必须对不同长度基线采取不同的数学模型,对流层延迟通过模型可以得到很好的改正,但是电离层难以通过模型改正,故对此有必要进行研究。对于短基线,基线长度小于15 km,双差之后电离层延迟基本被完全消除,其数学模型可以忽略电离层延迟的参数,即电离层固定模型;对于中基线,基线长度为15~100 km,但是对其双差之后电离层延迟消除的程度不确定,但是作为一个与基线长度有关的函数模型[5],即电离层加权模型;对于长基线,基线长度大于100 km,双差差之后电离层延迟难以消除,必须作为参数实数估计及估计天顶对流层延迟,即电离层浮点模型。
本文针对不同长度基线提出3种不同的电离层延迟处理策略,采用模糊度固定率及定位精度(与已知坐标进行比较)来评估3种电离层处理策略的有效性及可靠性。
1 数学模型
1.1 函数模型
GNSS常用的双差观测方程可以表示为

(1)
GNSS码伪距与载波相对定位的双差观测方程表示为
(3)

假定基站与流动站某一历元共同观测了n颗可见卫星,选取第一颗卫星为参考卫星,且令
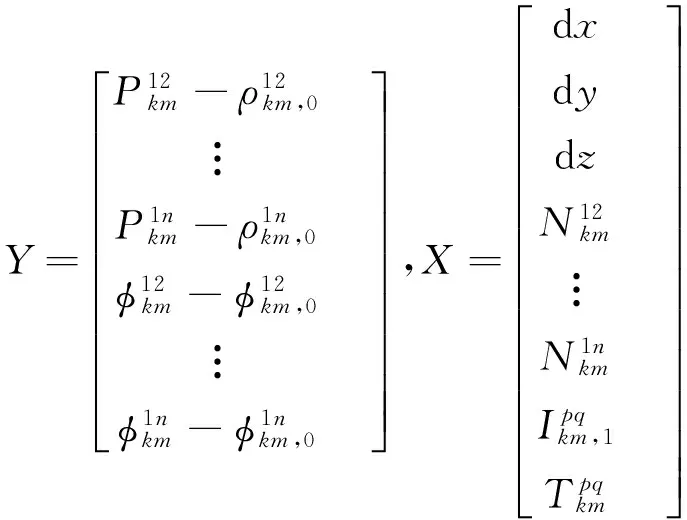
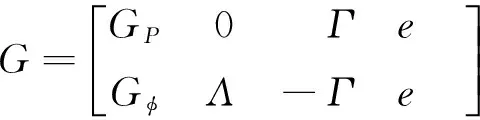
e=[1,1,…,1].
双差观测方程的矩阵形式

通过扩展kalman滤波估计参数X,在采用LAMBDA方法[6]解算双差整周模糊度N,获取固定解。
1.2 随机模型

Q=DRDT.
(5)
式中:R为站间单差观测量的协方差矩阵,假定选第一颗卫星为参考卫星,D为单差转双差的转换矩阵。


1.3 电离层处理策略
在进行双差之前,对对流层进行模型改正,可以很好地消除对流层延迟的影响。因此,双差之后的残留电离层延迟是主要的系统误差,影响着整周模糊度的解算及定位精度。对于不同长度基线,双差之后电离层延迟误差的消除程度也是不一样的。因此,对于不同长度的基线,考虑采用不同的电离层处理策略。
1.3.1 电离层固定模型
其随机模型没有变化。
1.3.2 电离层加权模型
对于长度为15~100 km的基线,即中基线,双差之后电离层延迟消除程度难以确定,因此,可以采用加权的方式对其进行估计。则中基线双差观测方程可以表示为

σI=l×0.99mm.
(11)
式中,l为基线的长度。
双差观测方程的协方差矩阵可以表示为
Q=DRDT.
(12)
式中:


1.3.3 电离层浮点模型
对于长度大于100 km的基线,即长基线,双差之后电离层延迟根本无法消除,因此,作为变化的参数与其他参数一起进行实时估计。则长基线双差观测方程可以表示为
其随机模型与1.3.1的随机模型一样。
1.4 模糊度固定率
整周模糊度解算是否正确直接影响相对定位的精度。而模糊度固定的性能可以通过模糊度固定率来体现,即模糊度固定率可以表示为[10]
其中:NCF表示固定的历元个数,NT表示解算的整个历元总数。因此,模糊度固定失败率为PfE=1-PSE。
2 实验分析
本文通过3组不同长度(短,中,长)基线的BDS/GPS组合相对定位来验证提出电离层处理策略,采用GPS/BDS两系统四频率兼容接收机实测长度分别为13 km,31 km,110 km的3组基线,采样间隔1 s。本文采用LAMBDA方法解算模糊度,并用Ratio值来确定模糊度的固定,设置Ratio=2。
通过图1、图2可以看出,在短基线的相对定位中,采用电离层固定模型的定位精度明显优于其余两种电离层处理策略。结合表1可以得出,采用电离层固定模型的定位精度为2~3 mm,模糊度固定率为100%,而采用其余两种电离层处理策略,定位精度反而显著降低,定位精度为7 cm左右,且模糊度固定率仅为24.1%(电离层加权模型)、26.6%(电离层浮点模型)。
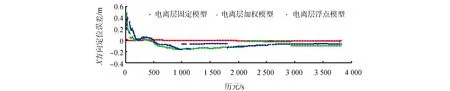
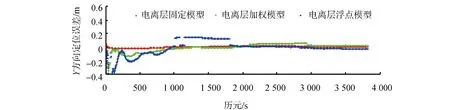

图1 短基线中3种电离层处理模型定位误差的比较

图2 短基线中3种电离层处理模型Ratio值序列的比较
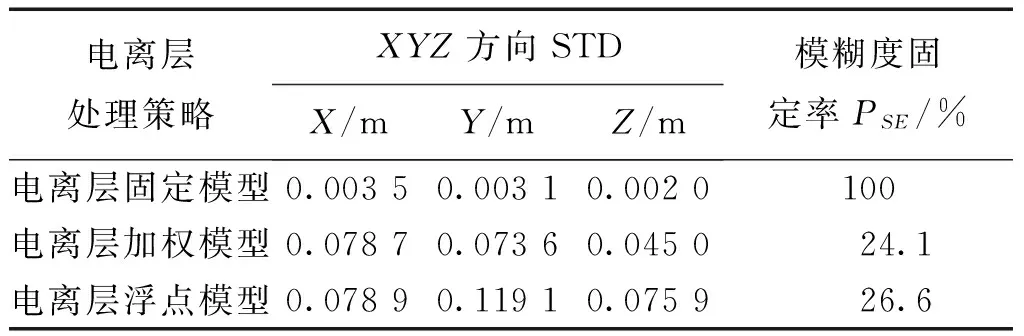
电离层处理策略XYZ方向STDX/mY/mZ/m模糊度固定率PSE/%电离层固定模型0.00350.00310.0020100电离层加权模型0.07870.07360.045024.1电离层浮点模型0.07890.11910.075926.6
在中基线的相对定位中,仅对电离层加权模型与电离层固定模型进行对比分析。通过图3、图4可以看出,对于中基线的相对定位而言,采用电离层加权模型的定位精度优于电离层固定模型。结合表2可以看出,采用前者的定位精度为7 mm左右,模糊度固定成功率为99.3%;而采用后者的定位精度为3 cm左右,模糊度固定成功率为90.4%。
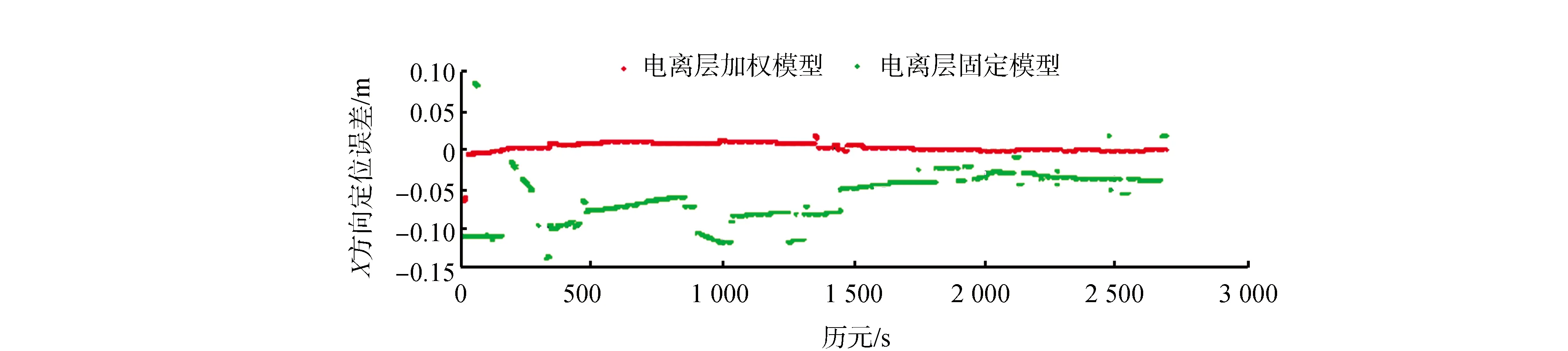
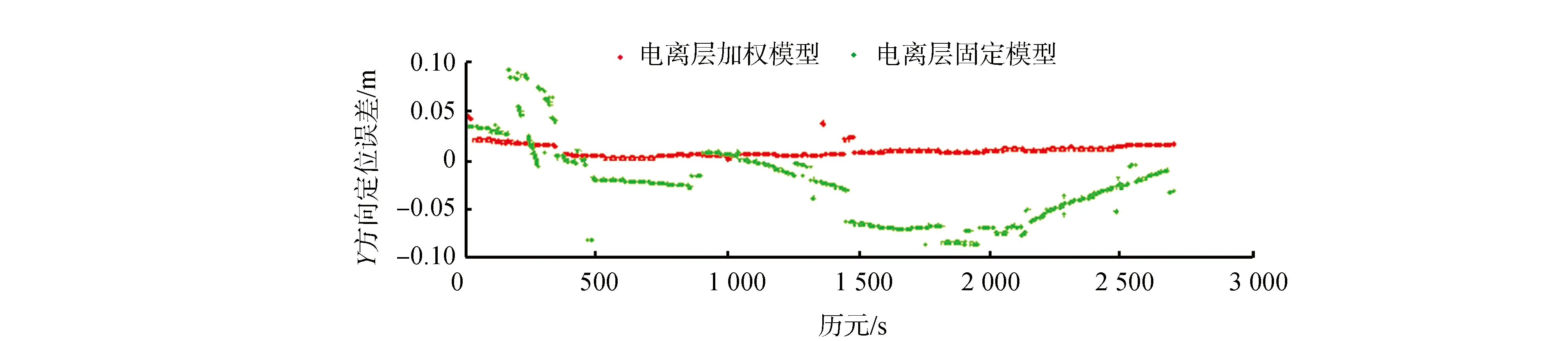
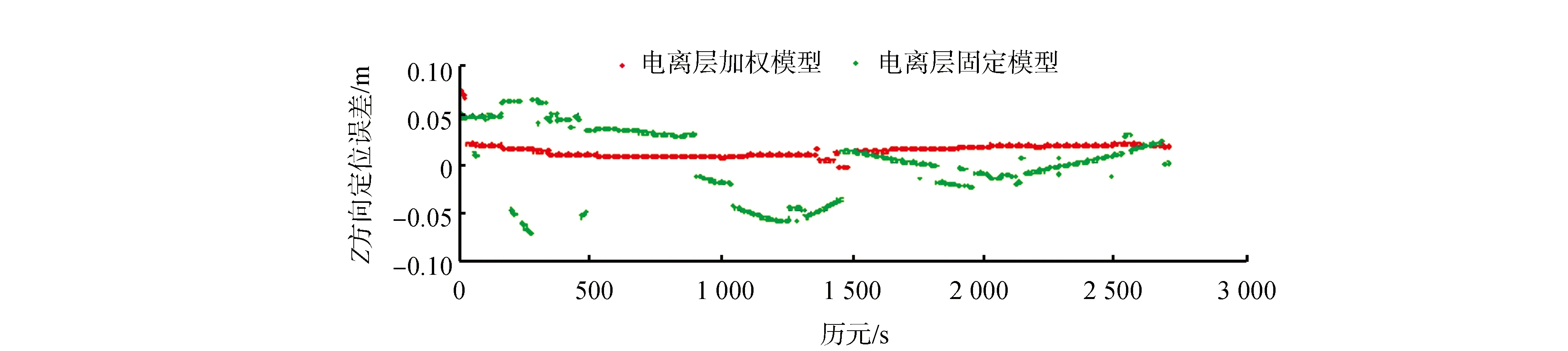
图3 中基线中电离层加权模型与电离层固定模型定位误差的比较
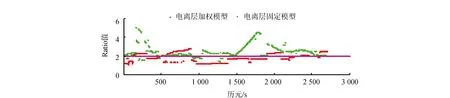
图4 中基线中电离层加权模型与电离层固定模型Ratio值序列的比较
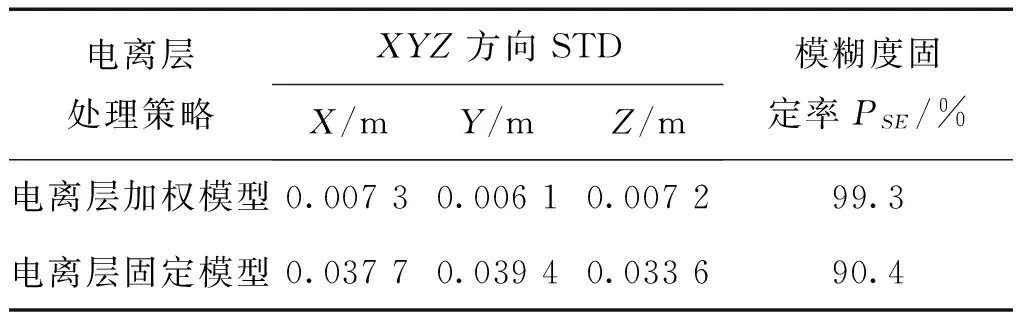
电离层处理策略XYZ方向STDX/mY/mZ/m模糊度固定率PSE/%电离层加权模型0.00730.00610.007299.3电离层固定模型0.03770.03940.033690.4
在长基线的相对定位中,同样地仅对电离层浮点模型与电离层固定模型进行对比分析。通过图5、图6可以看出,对于中基线的相对定位而言,采用电离层浮点模型的定位精度优于电离层固定模型。结合表3可以看出,采用前者的定位精度为5 cm左右,模糊度固定成功率为41.9%;而采用后者的定位精度为22 cm左右,模糊度固定成功率为23.8%。
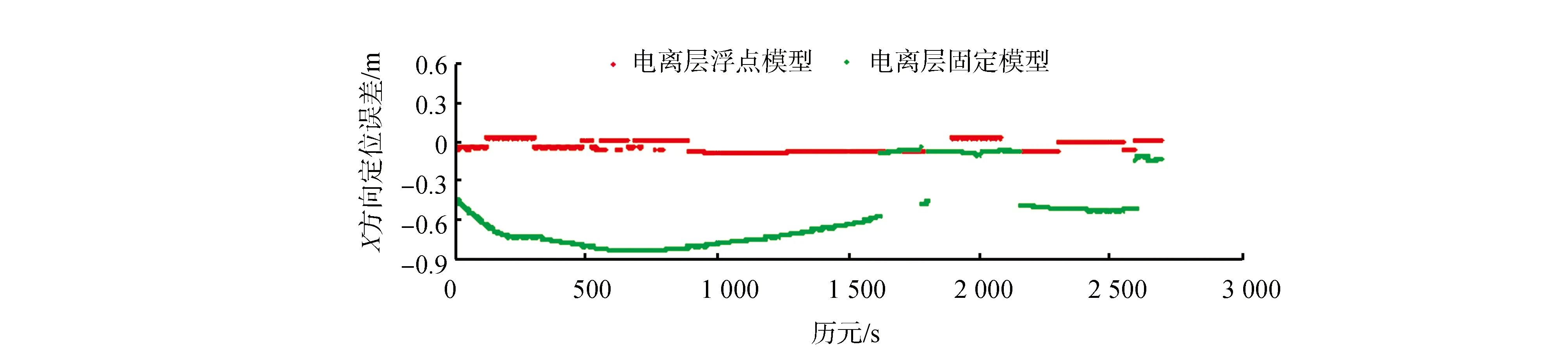

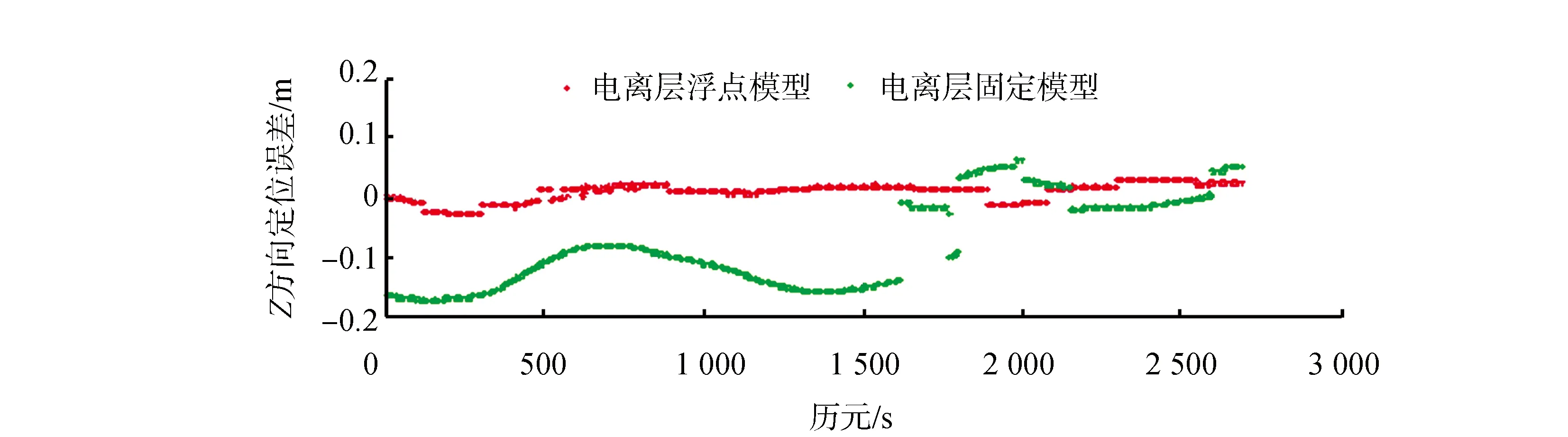
图5 长基线中电离层浮点模型与电离层固定模型定位误差的比较

图6 长基线中电离层浮点模型与电离层固定模型Ratio值序列的比较
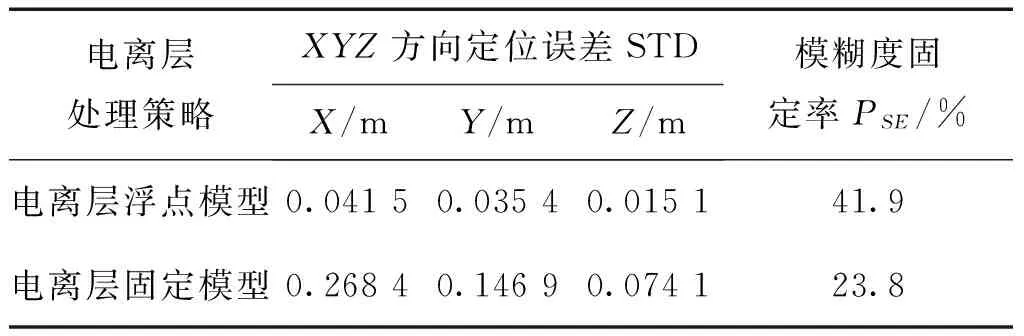
电离层处理策略XYZ方向定位误差STDX/mY/mZ/m模糊度固定率PSE/%电离层浮点模型0.04150.03540.015141.9电离层固定模型0.26840.14690.074123.8
3 结束语
对不同长度的基线受双差之后电离层残差影响的不同,对此,本文提出一种新的电离层处理策略,并推导了相关的数学模型。通过实验表明:对于短基线,采用电离层固定模型是最优的,其模糊度固定率及定位精度分别为100.00%和2 mm;对于中基线,采用电离层加权模型是最优的,其模糊度固定率及定位精度分别为99.3%和7 mm;对于长基线,采用电离层浮点模型是最优的,其模糊度固定率及定位精度分别为41.9%和5 cm。由此可知,该电离层处理策略对不同长度的基线处理效果是非常有效的,并且得出主要结论:不同长度的基线对应不同的数学模型,如果对不同长度基线采取合理的数学模型处理时,可以有效地提高模糊度固定率及定位精度。同时,如果没有采取合理的数学模型处理时,也可能会降低模糊度固定率及定位精度。
[1] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2010.
[2] 李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009.
[3] 刘基余.GPS卫星导航定位原理与方法[M].2版.北京:科学出版社,2008.
[4] 王世进,秘金钟,谷守周,等.BDS/GPS组合相对定位方法及精度分析[J].测绘通报,2014(5):1-4.
[5] ODIJK D.Fast precise GPS positioning in the presence of ionospheric delays[D].Publications on Geodesy 52,Netherlands Geodetic Commission,2002:242.
[6] TEUNISSEN P J G.The least-squares ambiguity decorrelation adjustment:a method for fast GPS ambiguity estimation[J].J geod,1995,70:65-82.
[7] ODOLINSKI R.Multi-GNSS Integer Ambiguity Resolution Enabled Precise Position[D].Curtin University,2015.
[8] 李金龙.北斗/GPS多频实时精密定位理论与算法[D].郑州:信息工程大学,2014.
[9] SCHAFFRIN B,BOCK Y.A unified scheme for processing GPS dual-band phase observations Bull[M].Geod,1988.
[10] ODOLINSKI R,TEUNISSEN P J G.An analysis of combined COMPASS/BeiDou-2 and GPS single-and multiple-frequency RTK positioning[J].Proceeding of The Institute of Navigation PNT,2013.
[责任编辑:刘文霞]
The treatment strategy of ionosphere delay with difference-lengths baseline
ZHOU Ying1,MAN Xiaosan2,LI Chen3
(1.Troops 61287,Kunming 650033,China;2.Information Engineering University,Zhengzhou 450001,China; 3.Fifth Construction Co.of China Railway Fruoth Bureau Group,Jiujiang 332000,China)
As to different-lengths baseline,differently affected by double-difference ionosphere delay,a new treatment strategy of ionosphere is proposed.Three different mathematical models are used for short,medium and long baseline: ionosphere-fixed model,ionosphere-weighted model and ionosphere-float model.The three different-lengths baseline data measured show that: this strategy can improve the ambiguity-fixed rate and positioning accuracy for different-lengths baseline.
ionosphere-fixed model;ionospheric-weighted model;ionosphere-float model;ambiguity-fixed rate
引用著录:周颖,满小三,李郴.不同长度基线的电离层处理策略[J].测绘工程,2017,26(1):21-25,31.
10.19349/j.cnki.issn1006-7949.2017.01.005
2016-01-02
周 颖(1988-),男,助理工程师.
P228
A
1006-7949(2017)01-0021-05
