籽瓜收获机械研究现状与发展展望
2017-12-16孔凡婷陈长林张玉同黄铭森孙勇飞
孔凡婷,陈长林,石 磊,张玉同,黄铭森,谢 庆,孙勇飞
(农业部南京农业机械化研究所,南京 210014)
籽瓜收获机械研究现状与发展展望
孔凡婷,陈长林,石 磊,张玉同,黄铭森,谢 庆,孙勇飞
(农业部南京农业机械化研究所,南京 210014)
籽瓜是我国北部地区重要的经济作物之一,研发适合我国农业现状的籽瓜收获机械,对降低劳动强度、提高籽瓜收获效率及我国农民的经济实力具有重要的意义。为此,分析了国内外籽瓜收获机械的研究现状,结合我国籽瓜种植模式,探讨现有籽瓜收获机械存在的问题,同时指出了籽瓜收获机向大型化、专业化和智能化收获发展的趋势,为提高籽瓜收获机械化水平提供了一定的参考依据。
籽瓜收获;机械化;研究现状;发展展望
0 引言
籽瓜包括籽用西瓜(又名打瓜)和籽用南瓜两种,种植于西北地区的宁夏、甘肃、新疆和东北地区及内蒙古等地。由于籽瓜对生长环境要求不高、种植模式简单,具有抗旱、投入成本低、经济效益较高等优点,因此籽瓜种植多分布在贫瘠土地和盐碱干旱地上,是农民增收的重要经济作物之一[1]。籽瓜的利用主要是食用瓜籽的获取,籽瓜含糖量低,氨基酸种类多,且瓜籽仁中含有丰富的磷、钾、锰、锌、铁等微量元素及大量的氨基酸和维生素,因而含有较高的营养价值[2],在东南亚和欧洲地区深受欢迎。
目前,我国农业机械化已进入中级阶段,2013年主要农作物耕种收综合机械化水平达到59% ,三大粮食作物耕种收综合机械化率均超过75%,小麦生产基本实现全过程机械化[3];而籽用瓜收获方式多数仍为人工收获,机械化收获水平非常低且发展缓慢,收获机械化仍处于初始阶段。近几年,随着籽瓜瓜籽国际市场的扩大,籽瓜的种植面积也在逐年扩大;但籽瓜手工捡拾、取籽收获效率低,生产成本高,严重制约了我国瓜籽的国内外销量。籽瓜成熟时容易腐烂,不宜在田间放置过久,而籽瓜成熟期又是棉花、玉米等主要作物收获的农忙时期,人力资源短缺,使籽瓜的收获变得更加困难。因此,在现有籽瓜收获机械的基础上研发出参数优化、结构合理、适合我国籽瓜种植模式的籽瓜收获机械,对促进籽瓜产业进入全面机械化、降低籽瓜的收获成本、增加瓜农经济收入、推动籽瓜产业的可持续性发展具有重要意义。
1 国内外研究现状
籽瓜收获机械主要包括集条、捡拾、清选脱籽3大部分。籽瓜机械化收获技术的研究与籽瓜栽培技术的研究相比,理论及应用均较为薄弱,研究思维单一,且大部分相关研究成果均用于科研与教学方面,并未得到实际应用,相关论文多为籽瓜物理特性及机械三维建模与仿真,而深入针对籽瓜收获现状的收获机理分析与机构设计与改进的研究性论文较少[4-7]。
1.1 国外研究现状
国外对瓜类捡拾机械的研究较早,20世纪六、七十年代时前苏联及美国等发达国家已经对西瓜等瓜类捡拾机械开展研究,并对相关专利进行申请[8-9]。国外瓜类捡拾机械结构是基于西瓜的基础物理特征设计的臂架结构捡拾器,这种装置利用弹簧的伸缩力捡拾籽瓜,在捡拾过程中效率不高且容易漏捡,因此实际生产并未得到应用。第2种捡拾机械为旋转圆盘配合侧挡板捡拾推送瓜类至传送装置,与此相似的还有圆筒型结构的捡拾机械。这两种捡拾机械结构复杂,工作时各个部件需相互配合。由于申请捡拾机械专利的国家主要种植的为食用南瓜、西瓜等经济作物,因此国外早期的捡拾装置研究领域更多的是应用于南瓜和西瓜等类作物的捡拾机械。
由于种植区域的限制,国外针对籽瓜收获机械研究较少,进而国外对于籽瓜收获、取籽等相关机械的研究鲜见有报道。英国南瓜供应商网站公示的有关南瓜收获机械作业的展示,如图 1所示。这种收获机将南瓜捡拾后经过驾驶舱下面穿过,既便于捡拾,也便于运输,但此类收获机械并未查到相应的研究文献。而对于跨地域性较广的西瓜,日、美等国设计研究过可自动捡拾瓜类的机器人机械手,但机械手关键技术是利用视觉技术及图像处理技术来分析定位的,此种机械不适合我国粗放型籽瓜种植模式的实际要求[10-12]。

图1 南瓜捡拾收获机
瓜类分段收获作业机械仅有奥地利的南瓜籽收获机械,技术已经趋于成熟,已在生产中得到广泛应用。联合收获机械有以色列的大型自走式籽瓜联合收获机,其构造复杂、整机体积巨大、价格昂贵,不适合我国籽瓜的种植及收获模式[13],如图2所示。

图2 以色列大型自走式籽瓜联合收获机
国外南瓜、西瓜等捡拾、收获较成熟的机械对我国籽瓜种植模式适应性较差,不适合我国地域的条件。因而,籽瓜机械化发展水平基本以国内为准。
1.2 国内研究现状
目前,我国籽瓜收获机械根据收获工艺主要分为3种类型:集条机、清选取籽机及联合收获机。
集条机械为便于人工或机械捡拾,将工作幅宽内田间散布的籽瓜拢集至一条直线。我国研制推广应用的籽瓜集条机械主要集中在新疆地区,包括以下几种:新疆农业科学院农业机械化研究所研制的4ZT-2.0型籽瓜集条机及塔城地区农机推广站研制的4DT-2.0型打瓜集条机[14],如图3所示。
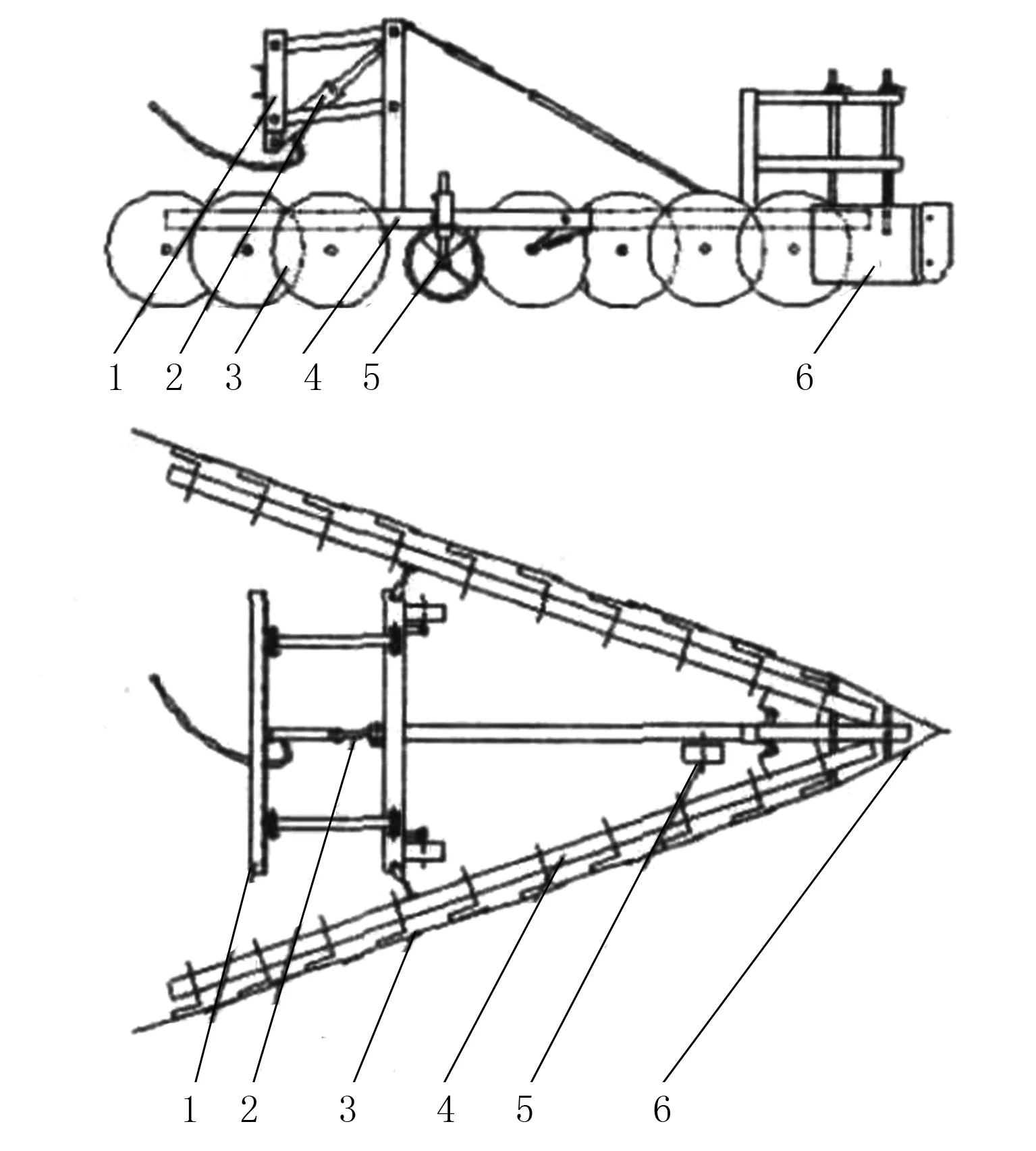
1.悬挂架 2.升降油缸 3.集条圆盘 4.机架 5.仿形压秧辊 6.分禾器
4DT-2.0型打瓜集条机与拖拉机配套使用,不仅可以对平坦土地种植的籽瓜进行集条收获,且可完成高低不平的土地上籽瓜与瓜藤的分离与集条,结构合理、故障率低、工作效果明显,但在籽瓜集条机的田间试验中发现集条机具作业时常出现挤瓜、伤瓜现象。
籽瓜集条机械还包括新疆机械研究院股份有限公司研制的4DT-1700 打瓜集条机(如图4所示)及塔城农机推广站研制的4DGJI-20型打瓜集条机。

1.分瓜器 2.机架 3.输送搅龙 4.锯片 5.四连杆悬挂机构 6.限深轮 7.拖拉机 8.传动装置
4DT-1700 打瓜集条机利用搅龙输送原理,将工作幅宽的籽瓜输送集中至一侧。试制样机田间试验结果表明:集条机械基本能够满足集条作业的要求,但仍存在瓜藤、杂草缠绕输送搅龙后部锯片轴、搅龙出料端出瓜不畅容易造成堵塞等问题[15]。其在结构和应用上尚有很多的问题,需要进一步的设计改进和推广。
目前,我国对清选机械的研究可以追溯到20世纪80年代末,清选取籽机械技术的发展较为成熟,市场上许多型号的清选取籽机械已推广应用。
清选取籽机械按照其破碎方式与分离方式的不同,可分为以下几种类型:切割挖瓤取籽类,主要包括钟逸岩、黄晓鹏等人设计的几种籽瓜挖瓤机[16-17],可有效分离籽瓤;但其设备庞大、不便于润滑,挖瓤后的籽瓤混合物难以进行高效的分离。打击振动分离类,如邓身康利用空心扇形锤块和振动条筛设计的籽瓜脱粒机[18];削皮粉碎分离类,如王天书利用削皮后再粉碎分离的原理设计的多功能籽瓜分离机[19];打破挤压分离类,如张锋伟设计的籽瓜籽汁分离机,可实现皮、瓤、籽的一次性分离[20];破碎取籽类,籽瓜先经过切碎装置的挤压与切碎将籽瓜破碎,然后螺旋搅龙将已破碎的籽瓜推送至皮瓤分离装置,在分离转轴的搅动下,瓜皮和部分瓜瓤从皮瓤分离装置内排出,瓜籽和剩余的瓜瓤、瓜汁从清选筛网进入脱籽装置,最后在脱籽轴的作用下瓜籽与瓜瓤分离,经螺旋输送搅龙送入储存箱,瓜汁经过脱籽筛网排出,籽瓜收获机械经过以上连续过程来实现籽瓜脱籽。破碎取籽类机械在对籽瓜的收获过程中节省工序,能在自然天田地间一次性完成籽瓜的捡拾及脱粒,提高收获效率,降低收获成本,故该种机械研究应用较多。例如,由原新疆农业大学和玛纳斯农机研究所联合研制的6DQ-8型打瓜取籽机,由新疆石河子大学马春生、蒋光融成功研制并获得国家实用新型专利的6GC-300型打瓜取籽机[21],以及新疆石河子昌农农机有限公司研制的5TGH-300、6GQX系列打瓜取籽机等。其中,昌农农机有限公司研制籽瓜取籽机在籽瓜主产区—新疆地区广泛推广使用,该公司所研发的5TGH-300型打瓜取籽机如图5所示。此外,针对东北地区种植的籽用南瓜也研发了相应的双轴破碎取籽机械,如黑龙江密山市双胜农机配件厂制造销售的5TB-1600A型白瓜籽分离机和 5TB-1600B型白瓜籽分离机等。
联合收获是实现籽瓜机械化的战略重点和主攻方向。现阶段,我国籽瓜机械化收获仍处于起步阶段,籽瓜联合收获机在不断的试验示范和推广中。国内研发主要集中在自动化程度不高、机型较小的联合收获机方面。由于新疆地区对籽瓜经济效益的重视,我国在新疆率先开展籽瓜机械化收获技术的相关研究,并于实际的籽瓜收获过程中开始应用机械化收获技术。

图5 5TGH-300型打瓜取籽机
籽瓜联合收获机相关代表机型如下:新疆农业科学院研制的背负式4ZBL-2籽瓜联合收获机,如图6所示。4ZBL-2背负式籽瓜捡拾取籽联合机直接选用市场上技术成熟的取籽机与捡拾装置配套,以降低成本;在机架一侧固定捡拾齿辊,机架上铰接捡拾齿辊轴,工作时可随地表仿形,在运输时可由液压油缸升起;八字型的籽瓜集拢器置于捡拾齿辊前方,工作时捡拾器除了前进方向的运动,还在链轮的驱动下绕主动轴作椭圆形逆时针旋转,捡拾弹齿运动至捡拾器底部时竖直与籽瓜接触,在回转冲击力的作用下使籽瓜沿着活动机架向上运动, 并由弹齿推送至输送器。该联合机结构简单,取净率高,便于操作。田间试验表明,该机效果比较理想[22-23]。但由于实时收获理论上的不成熟,该机在籽瓜成熟季节存在漏捡率较高、瓜籽破损率较大及分离除杂不彻底的等现象,仍需进一步改进优化。

图6 4ZBL-2背负式籽瓜联合收获机
现代农装科技股份有限公司研制的4ZGJT-500 型籽瓜捡拾脱籽联合作业机如图7所示。该机与中小型四轮拖拉机配套使用,一次性可完成籽用瓜类的捡拾和脱籽作业,并具有动力要求低、产品使用周期长、机械结构简单合理、价格低廉及工作稳定可靠等特点[24-25]。
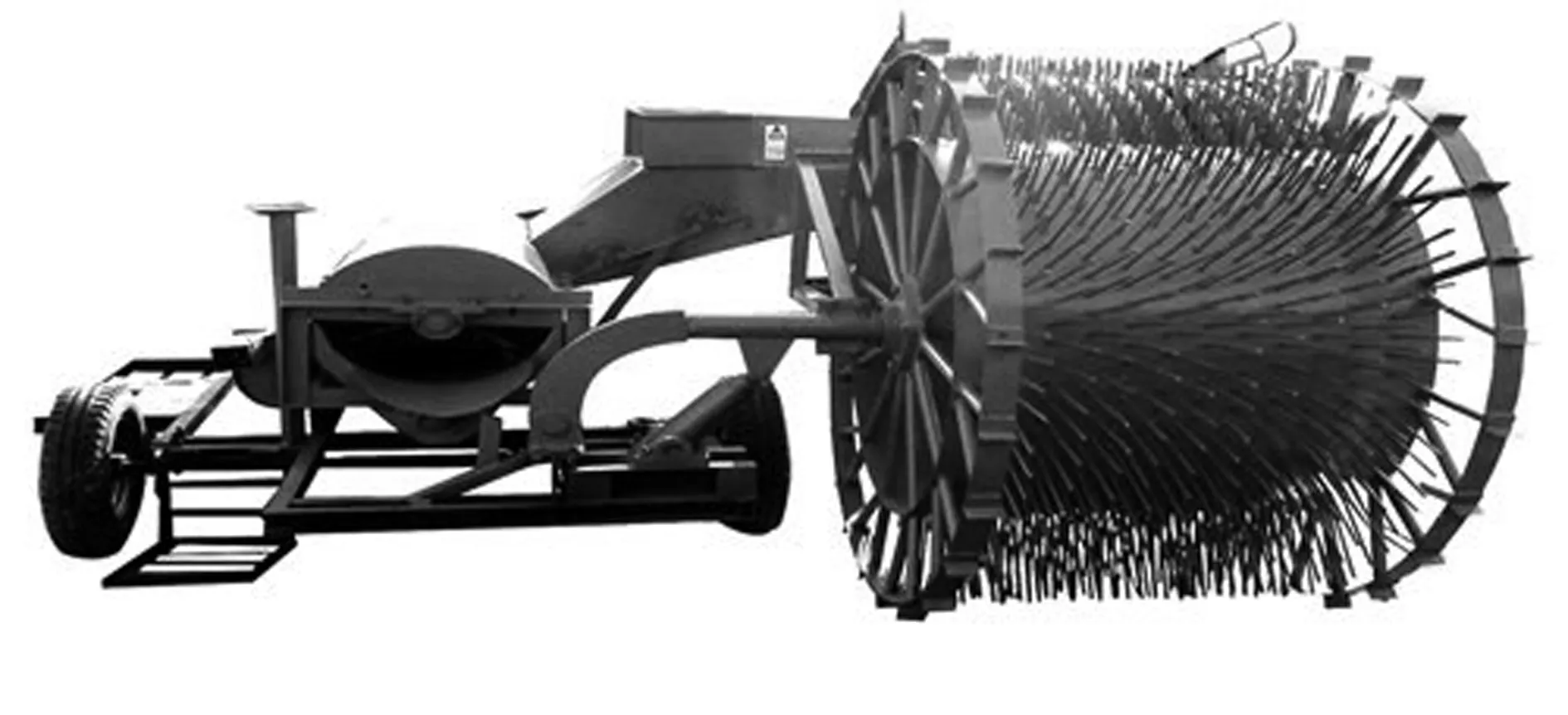
图7 4ZGJT-500型籽瓜捡拾脱籽联合作业机
工作时,4ZGJT-500型籽瓜收获机通过牵引机构与拖拉机相连,拖拉机牵引带动捡拾扎瓜器向前滚动,籽瓜集拢器将已集条的籽瓜集拢到扎瓜器的工作幅宽内,扎瓜器将籽瓜从田间扎起;当籽瓜随着扎瓜器的转动转至瓜齿分离器位置时,分离装置将籽瓜与扎瓜齿梳离,籽瓜在重力的作用下沿斜槽进入籽瓜清选装置。
此外,新疆塔城地区的佐剑波、毛剑峰等研制了籽瓜收获机,并申报了“联合打瓜收获脱籽机”“一种自动化籽用瓜捡拾脱籽联合作业机”等专利[26-27]。但由于该机具结构复杂、安全可靠性差,同时存在适应性等问题,仅制作了样机进行田间试验,且因为该机具工作幅宽较小、作业效率不高,无法大面积使用,没有在生产中推广。总体来看,我国目前尚无技术成熟的籽瓜捡拾脱籽联合收获机械。
2 存在问题
籽瓜多为长藤圆球或椭球状,于田间呈现无序生长模式,所要求的收获机具技术难度大。从现有的籽瓜收获机械装备来看,籽瓜收获机械化、自动化技术的理论研究及应用水平仍有待发展,机构及收获技术的研究还存在很多问题。
2.1 捡拾装置缠藤等问题
目前,制约籽瓜生产全程机械化的主要问题是捡拾技术。扎瓜器虽传动简单、工作效率较高,但缠藤现象频繁出现,田间工作时需配备专门人员清藤,清理工作时间增加,对收获效率产生较大影响,且增加了人工成本。此外,扎瓜器还存在体积庞大、生产造价高、仿形效果差等问题。同时,成熟籽瓜体积及质量大,生长分布不均匀,收获时籽瓜捡拾装置很难实现高效捡拾。
由于清选装置技术、工艺相对成熟,可重点研发改进与集条装置配合的捡拾装置,着重解决瓜藤缠绕现象,在保证籽瓜的捡拾率的前提下实现高效收获,有效地促进籽瓜收获的全程机械化。
2.2 单一机械作业周期长、所需劳动成本高问题
籽瓜收获具有严格的时节性,单一机械的多次作业造成收获不及时,降低了籽瓜品质及产量,严重影响瓜农的经济效益。另外,无论是籽瓜集条机械、捡拾机械还是脱籽机械,由于其劳动强度高、工作效率低,以及安全方面及动力消耗等,对籽瓜收获机械的推广发展应用有着非常大的影响,也对籽瓜收获机械化进程有着非常大的制约,无法满足籽瓜机械化发展与推进。而籽瓜联合机械可有效地提高动力的利用率,减少了田间的作业程序,降低总损失率,将成为籽瓜收获机械的主流产品。
2.3 现有联合收获机械适应能力差问题
自走式联合收获机械具有自动化程度高、作业过程顺畅、收获效率高及劳动成本节约等特点,但是我国现有籽瓜联合收获机械多用于膜下滴灌种植的无沟无垄的平整地块作业,收获时对土地的要求比较高,特别是在地面高低起伏明显、石块较多情况下的籽瓜种植地捡拾,漏检率高、捡拾效果不理想。
所以,籽瓜联合收获机械还需要进一步的改进和优化,在捡拾机械上增加地面仿形机构,保证恶劣环境下机具的正常运行,减小捡拾漏检率及破损率,提高籽瓜联合收获机械适应能力,为自走式联合收获机奠定良好的基础。
3 展望
籽瓜种植模式粗放,且生长条件及瓜藤长势无序多样,为提高籽瓜收获机械的作业效率,使收获技术更加完善,需进一步研究优化籽瓜收获机械的工艺参数,探索其结构和工艺参数的最佳配置。首先,要在原有机械的基础上针对我国籽瓜的生长特点及其物理特性研制出技术成熟、工作可靠的籽瓜联合收获机械;其次,要在籽瓜机械化收获领域里继续开发农机市场急需的空白产品。
3.1 基础研究与先进技术的综合应用
组织农机科研所、院校与生产企业和推广部门联合,加强信息沟通交流,优势互补,协调发展,加大对籽瓜收获机研发的投入。同时,应当从基础的机理方面入手,考虑籽瓜的采摘、捡拾、破碎、清选等各阶段的相关影响因素,重视核心关键技术机理研究和系统的基础理论的研究,运用三维仿真设计及模拟与实际作业相结合,提高设计人员水平及产品技术含量。
3.2 加装瓜皮瓜瓤回收装置,增加副产品经济效益
由于籽瓜的瓜皮瓜瓤营养成分较高,富含维生素、氨基酸等多种营养元素,且所占比重较大,可将瓜皮瓜瓤收集处理用作家畜饲料,以提高籽瓜利用价值,促进农民持续增收。
现阶段,我国小型籽瓜收获机由于动力和体积的制约,还没有先进实用的瓜皮瓜瓤的收集设备, 仅能完成瓜籽的收获作业,收获过程中直接将瓜肉丢弃在田间,造成瓜皮瓜瓤资源的极大浪费。在自走式籽瓜联合收获机的研发过程中,应考虑安装回收装置,将瓜皮瓜瓤回收,提高籽瓜经济效益。
3.3 重点开发集条、捡拾、清选一体的智能化自走式联合收获机
自走式籽瓜联合收获机具有结构紧凑、操作方便、田间适应性强及工作性能好等优点,在提高作业生产率使得作业周期缩短、减轻劳动强度的同时,还可以最大限度地增加收获时的籽用瓜籽的产量。
机、电、液技术相结合,开发出适合我国籽瓜种植产业、具有中国特色的自走式籽瓜联合收获机,是我国籽瓜机械化发展的必由之路。
4 结语
综上所述,籽瓜的机械化收获技术虽取得了一些成果,但我国的籽瓜收获机械化仍处于初始阶段,籽瓜的机械化水平远落后于其他农作物收获机械化水平,还没有达到实用化的水平,仍存在着许多有待于解决的问题。
随着籽瓜种植面积的扩大,在籽瓜收获过程中机械化的参与程度越来越高,迫切要求发展劳动强度低的机械化收获方式,成熟的籽瓜机械化收获技术将成为该产业发展的必然选择。在国家及政府的政策支持下,相关部门对籽瓜机械化发展更加重视,科研院所的研究力度也随之加大, 籽瓜机械化收获技术必将取得技术性的突破,迎来快速发展的历史机遇。
[1] 徐丽珍, 于晓凤.黑龙江省籽用南瓜(白瓜籽)科研和生产现状及存在的问题[J].黑龙江农业科学, 2009(3): 142-143.
[2] 赵多勇,李应彪,翟金兰,等. 籽瓜系列产品的开发现状与存在问题[J].北方园艺, 2008(4):100-102.
[3] 农业部南京农业机械化研究所.中国农业机械化年鉴[M].北京:中国农业科学技术出版社, 2014.
[4] 张宏阳,王春耀,樊军,等.打瓜机捡拾辊筒部件起升过程强度分析—基于 ANSYS Workbench[J]. 农机化研究,2013, 35(6):41-44.
[5] 王学农, 牛长河, 陈发.基于虚拟样机的打瓜捡拾脱籽联合收获机设计[J].农机化研究, 2010,32(12):88-91.
[6] 牛长河, 王学农, 刘旋峰. 基于打瓜力学特性的破碎装置研究与分析[J].新疆农业科学,2012,49(11): 2108-2115.
[7] Emadi B, Kosse V, Yarlagadda P K O V. Mechanical properties of pumpkin[J].International Journal of Food Properties, 2005, 8(2): 277-287.
[8] EL Scheidenhelm.Harvester for pumpkins and similar crops: U.S. Patent 2,835,098[P].1958-05-20.
[9] WW Porter.Pumpkin harvester: U.S. Patent 3,600,881[P].1971-08-24.
[10] Parrish E A, Goksel A K. Pictorial pattern recognition applied to fruit harvesting[J].Transactions of the ASAE, 1977, 20(5): 822-0827.
[11] Edan Y, Miles G E. Animated, visual simulation of robotic melon harvesting[C]//Paper-American Society of Agricultural Engineers (USA).St.Joseph, MI:ASAE,1989.
[12] Humburg D S, Reid J F. Field performance for machine vision for selective harvesting of asparagus[J]. Applied Eng. in Agriculture, 1986, 2(1): 2-5.
[13] Kocabiyik H, Kayisoglu B, Tezer D. Effect of moisture content on thermal properties of pumpkin seed[J]. International Journal of Food Properties, 2009, 12(2): 277-285.
[14] 马跃,牛长河,石鑫,等.4ZT-2.0 型籽瓜集条机的研制[J]. 新疆农机化,2011 (5):27-28.
[15] 靳范. 4DT-1700 型打瓜集条机的研制[J].新疆农机化, 2009 (6):19.
[16] 钟逸岩,杨自萍,孟刚.籽西瓜挖瓤机的研究[J].农业工程学报,1993,9(1):57-63.
[17] 黄晓鹏, 同长虹, 万芳新. 籽瓜挖瓤机设计与试验[J].农业机械学报, 2011, 42(1): 90-94.
[18] 邓身康,张奋儒.籽瓜脱粒机:中国,88220226.X[P].1989-08-09.
[19] 王天书.多功能籽瓜分离机:中国,96212852.X[P].1997-09-10.
[20] 张锋伟,韩正晟,张知文,等.籽瓜籽汁分离机的设计[J]. 农业机械, 2010 (5):133-134.
[21] 马春生. 6GC-300 型打瓜取籽机[J].企业科技与发展: 上半月, 1994 (6):15.
[22] 阎洪山,杨怀君,薛理,等.4ZBL-2 背负式籽瓜联合收获机的设计[J].安徽农业科学,2012,40(19): 10331-10333.
[23] 阎洪山, 杨怀君, 薛理, 等. 4ZBL-2 背负式籽瓜联合收获机收获功率消耗分析[J]. 农机化研究, 2012,34(10): 66-68.
[24] 王庆惠,王学农,牛长河.4ZGJT-500 型籽瓜捡拾脱籽联合作业机研制及效益分析[J].农机化研究, 2012, 34(11):111-113.
[25] 王庆惠,王学农,牛长河.打瓜捡拾脱籽机捡拾辊的结构设计[J].农机化研究, 2012,34(7):118-121.
[26] 佐剑波. 改进的联合打瓜收获脱籽机:中国,CN2802936Y[P].2006-08-09.
[27] 毛剑峰.一种自动化籽用瓜捡拾脱籽联合作业机:中国,CN203537863U[P].2014-04-16.
Research Status and Development Prospect of Seed-melon Harvester
Kong Fanting, Chen Changlin, Shi Lei, Zhang Yutong, Huang Mingsen, Xie Qing, Sun Yongfei
(Nanjing Research Institute for Agricultural Mechanization Ministry of Agriculture ,Nanjing 210014,China)
Seed-melon is one of the important economic crops in northwest area of China. Research and development of seed-melon harvester which suit the present of our country’s agricultural has very important significance to reduce the labor intensity, improve the efficiency of the seed harvest and improve the economic strength of Chinese farmers. Research status of seed-melon harvester is analyzed at home and abroad. The types of seed-melon harvester and their advantages and disadvantages are discussed, combined with the present situation of seed-melon in China, and the development trends of seed-melon harvester will proposed toward large-scale, specialization and intelligence. The article offers a reference to improve the seed melon harvest mechanization level.
seed-melon harvest; mechanization; research status; development prospect
2015-12-21
公益性行业(农业)科研专项(201203057)
孔凡婷(1989-),女,哈尔滨人,助理研究员,(E-mail)kongfanting1989@163.com。
陈长林(1972-),男,江苏泰州人,副研究员,(E-mail)njsccl@163.com。
S223.4
A
1003-188X(2017)02-0259-06
