铧式犁减阻性能研究
2017-12-16徐锐良刘美洲郭志军
徐锐良,刘美洲,郭志军
(河南科技大学 车辆与交通工程学院,河南 洛阳 471003)
铧式犁减阻性能研究
徐锐良,刘美洲,郭志军
(河南科技大学 车辆与交通工程学院,河南 洛阳 471003)
优化铧式犁犁体曲面形状,降低耕作阻力,是一项亟待解决的问题。从犁体曲面成型方法可知,导曲线形状是影响铧式犁耕作阻力的一个重要因素。为此,以BTU35犁体为基础,在SolidWorks中建立5种不同导曲线犁体,并将模型导入ANSYS进行显示动力学分析,得到其耕作阻力。仿真试验表明:以四次多项式曲线为导曲线形成的犁体耕作阻力较小,在3km/h时降阻3.75%,7km/h时降阻4.56%,平均降阻3.93%。结合不同导曲线曲率半径变化情况与工作阻力之间的关系,可得结论:导曲线曲率半径变化复杂的犁体有较好的减阻性能。
铧式犁;耕作阻力;导曲线;ANSYS
0 引言
我国是一个农业大国,每年有1亿hm2的土地需要耕作。铧式犁作为最常用土壤耕作机具之一,每年要消耗大量能源,如果能通过合理设计犁体曲面形状来达到降低耕作阻力、减少能源消耗的目的,将对我国经济发展具有重要意义。针对如何改变铧式犁结构、减小耕作阻力这个问题,国内外学者曾做过很多研究。1968年,匈牙利开始生产滚子犁,用滚子代替犁壁尾部切去的部分,使土垡沿犁壁的运动由滑动摩擦变为滚动摩擦,从而减小犁壁与土壤之间的摩擦阻力;但滚子犁翻土性能与覆盖性能都很差,又需增加滚子装置,导致成本也增加[1]。1972年,前苏联用聚四氟乙烯塑料覆盖犁体曲面,生产出塑料犁,试图减小犁壁与土壤的摩擦阻力。塑料犁在作业时有很好的减阻效果,但犁体磨损快、寿命短、成本高[2]。李庆中、曾德超用海绵翻转来模拟土壤翻转,将整体土垡翻转运动与土垡微元相对犁体曲面运动结合起来研究,建立一个能够把犁体曲面参数、耕作能耗与耕作质量联系起来的通用优化模型,实现了犁体曲面的优化设计,所设计犁体具有较好的降阻性能,其翻土、碎土性能也能达到耕作要求[3]。广西大学杨坚教授设想通过协调铧式犁各个参数来降低耕作阻力,但铧式犁参数众多,很难找到最佳组合参数来设计犁体曲面[4]。由于种种原因,上述方法并没有大范围推广。本研究通过MatLab曲线拟合功能,建立曲率半径变化不同的曲线,用这些曲线作为导曲线,建立不同的犁体曲面;采用仿真软件ANSYS/LS-DYNA,对犁体进行动力学分析,旨在探索不同导曲线形式对耕作阻力有何影响,从而达到优化犁体曲面形状的目的。
1 铧式犁模型创建
1.1 铧式犁犁体曲面成型方法
铧式犁主要是通过犁体曲面完成对土壤的松碎和扣翻,达到土壤耕作的目的。因此,犁体曲面性能的优劣对耕作质量和耕作阻力有很大影响。犁体曲面成型方法主要有水平直元线法、倾斜直元线法、曲元线法和翻土曲线法等几类[5],本研究采用水平直元线法设计犁体曲面。所谓水平直元线法,就是一直元线沿着导曲线,按照与沟壁间所夹元线角变化规律,自下而上移动形成的犁体曲面[6],如图1所示。
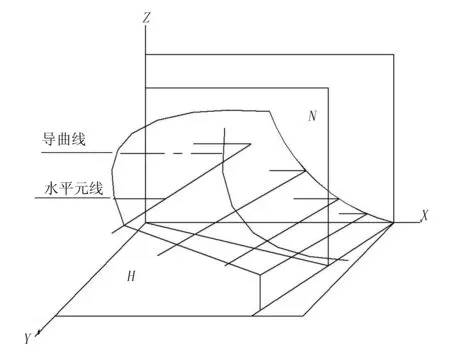
图1 犁体曲面形成示意图
1.2 导曲线的创建
铧式犁导曲线是犁体曲面与铧刃线垂直平面相交的截面线,是控制水平直元线位置的指导线。导曲线一般做法是在平面坐标内,分别量取导曲线开度L和高度H,确定点A;自坐标原点O作直线OB,与X轴成ε角,并在其上截取直线段OC等于S;过A点作直线AE与直线OB成一定角度,并交OB于点E;在CE与AE两直线上截取数个等分点,顺序编号,用直线连接同序号的点,得一直线族,作其公切线即得导曲线的包络抛物线,如图2所示。
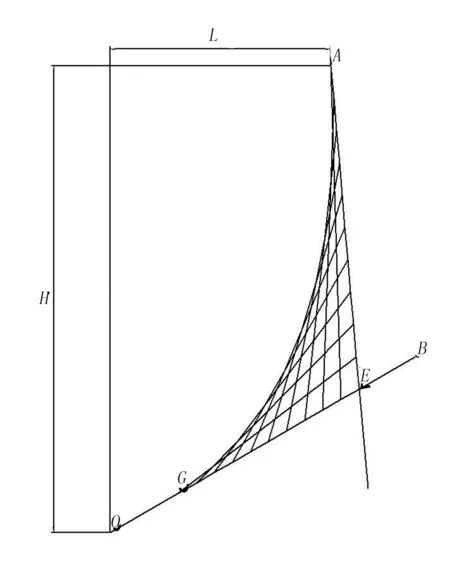
图2 导曲线形成示意图
本研究BTU35犁体导曲线即采用上述包络线作图法,其它犁体基本参数都按BTU35犁体参数,如表1所示。不同的是导曲线是根据直线与直线最左边11个交点的坐标[(30,-238.871)、(49.149,-213.962)、(71.376,-191.982)、(96.681,-172.929)、(125.064,-156.806)、(156.525,-143.606)、(191.064,-133.336)、(228.681,-125.993)、(269.376,-121.579)、(313.149,-120.092)、(360,-121.532)]在MatLab中通过不同方程式进行拟合,得到的4种曲线。用所得4种曲线分别作为导曲线在SolidWorks中建立犁体曲面模型,导曲线方程如表2所示,导曲线图形如图3所示。
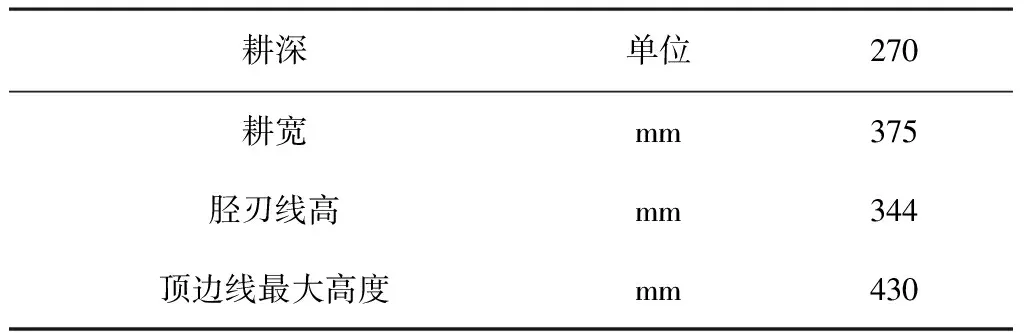
表1 BTU35犁体参数

续表1
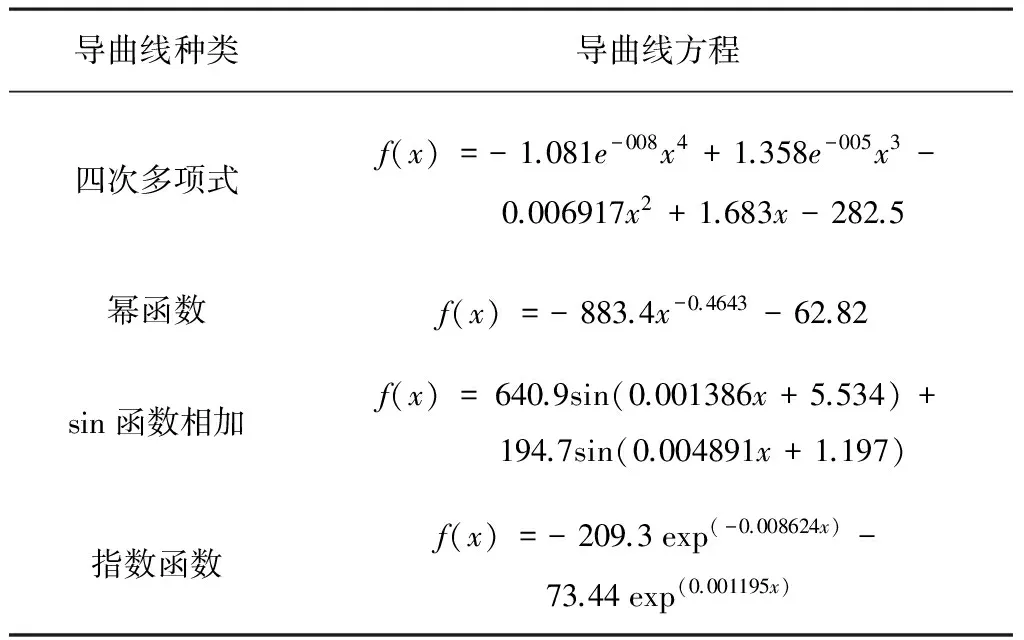
表2 导曲线方程
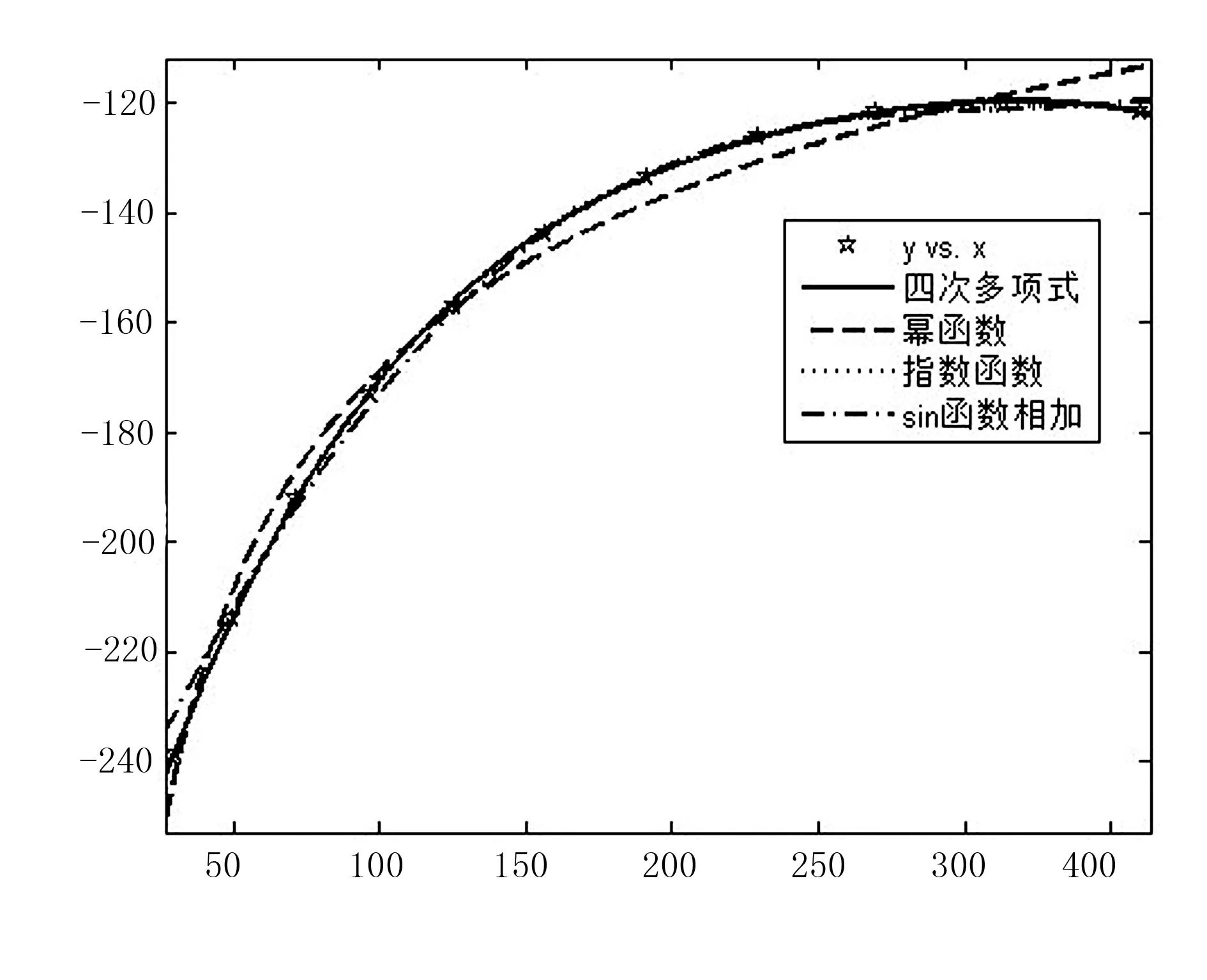
图3 不同导曲线图形
1.3 导曲线曲率半径分析
根据微分几何知识可知曲率半径公式为
在MatLab中输入以下语句
syms x g f1 f2 f;
f=方程式;
f1=diff(f);
f2=diff(f1);
g=(1+f1^2)^(3/2)/abs(f2);
ezplot(x,g,[0 400])
由此可求曲线在[0 400]范围内的曲率半径,如图4所示。由图4可知:在[0 400]范围内,幂函数、指数函数、正弦函数相加函数曲率半径都是先减小后增大,中间出现一个极值点;四次多项式函数曲率半径先减小、后增大、再减小,中间出现两个极值点。

图4 曲率半径变化图
2 仿真试验
2.1 有限元模型的建立
将建立的犁体模型导入ANSYS中,在仿真分析中把土垡模型简化为一个长方体,由于其形状比较简单,直接在ANSYS中建模,土垡长宽高分别为1.5、0.4、0.32m。对犁体模型和土垡模型分别进行网格划分,以便形成可供分析的有限元模型。由于犁体是一个不规则实体,微观形状为三面锲形状,对其只能采用自由网格(Free)划分,开启智能网格控制,设置为9级精度。对于形状比较规范的土垡模型,采用扫略(Sweep)方式对其网格划分。有限元模型网格参数如表3所示。
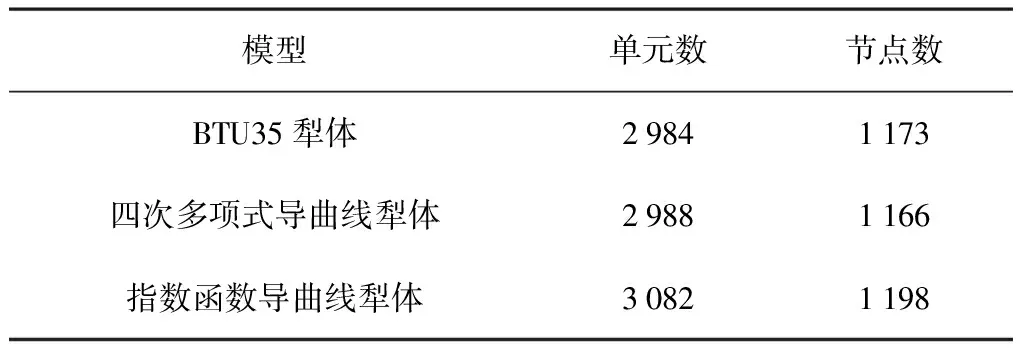
表3 有限元模型网格参数

续表3
2.2 ANSYS/LS-DYNA中土壤切削模型参数设置
用刚性体模型定义有限元模型中刚硬部分可以大大缩减显式分析的计算时间,因此定义犁体材料模型为刚体。约束其X轴、Y轴平动自由度和所有的转动自由度,只保留沿Z轴方向平行移动自由度。根据相关资料[7],犁体材料为16Mn,材料模型如表4所示。
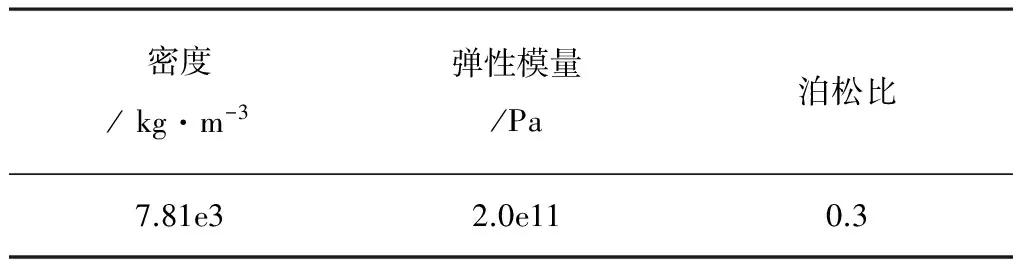
表4 犁体材料特性
对于土壤,其应力与应变关系非常复杂,具有非线性、弹塑性、粘弹性及流变性等特征,结合以往的研究发现,弹塑性模型可以很好地反映土体的非线性特征[8]。根据对土壤物理及力学特性分析,本研究采用LS-DYNA中的塑性随动材料模型,参阅相关资料[9],土壤模型的材料特性参数值如表5所示。

表5 土壤材料特性
从Z轴正方向看,约束其下底面、左侧面和后视面全部自由度。实际情况中,土壤模型为无限大区域,为了真实反映土壤之间作用力,本研究对土壤模型上述3个面施加非反射边界条件来模拟无限大空间。
在LS-DYNA接触算法中,当一个物体的面穿透另一个物体的面时,使用面面接触算法;犁体切削土壤时,土壤单元会失效,侵蚀接触的目的就是保证在模型外部的单元失效被删除后剩下的单元依然能够考虑接触。因此,犁体与土壤接触类型采用面面侵蚀接触(Surface to Surface-Eroding)。载荷分别定义为犁体以3 、4、5、6、7km/h恒速沿Z轴负方向行驶,求解时间分别设置为1.8、1.35、1.08、0.9、0.77s。为了减小计算时间,设置时步比例因子为0.6,质量缩放系数为-e4,负号表示质量缩放仅加到时间步长小于设定值单元上。输出文件选择可用LS-Prepost读入的LS-DYNA类型,并在ASCII输出文件控制中添加RCFORC,用于输出接触面接触反力。全部参数设置好后,开始求解。直到界面出现“Solution is done!”,说明计算完成。
3 结果分析
LS-Prepost是LSTC公司专门为LS-DYNA求解器开发的高级有限元后处理软件,打开LS-Prepost软件后,首先读取d3plot结果文件,可以显示土壤在各个时刻所对应的应力云图,如图5所示。
打开ASCll中的rcforce文件,可以显示出犁体在作业中所受到的X轴方向、Y轴方向、Z轴方向的界面反力及所受总阻力图形;用记事本打开rcforce文件,可得犁体在各个时刻所对应的耕作阻力数据;把数据导入excel中进行处理,可求出犁体在耕作中所受的平均阻力。
3.1 切削过程中土壤应力变化
由图5可知:当铧式犁开始与土壤接触时,土壤率先发生形变,随着犁体与土壤接触位移的增大,土壤变形量也在增大,直到土壤被破坏,最终土壤应力趋于稳定状态。在0.216s时,犁体铧尖刚开始进入土壤,受到挤压的土壤开始变形,最大应力为72 803.2Pa,发生在铧尖处;在0.464 4s时,犁体已部分进入土壤,犁体的铧刃和胫刃分别自水平方向和铅垂方向将土壤切开,形成一个具有一定宽度和深度的垡条,此时最大应力为80 357.7Pa;在0.626 4s与0.799 2s时,犁体全部进入土壤,最大应力为80 951.6、81 121.5Pa,切削过程进入稳定阶段,被切开的土垡沿着碎土曲线向上运动的同时,又沿着翻土曲线向右侧翻转。
3.2 铧式犁阻力分析
所谓犁体耕作阻力是指沿犁体前进方向的反作用力,此研究模型是指沿z轴方向的接触反力。在LS-Prepost中读取Z方向耕作阻力,如图6所示。
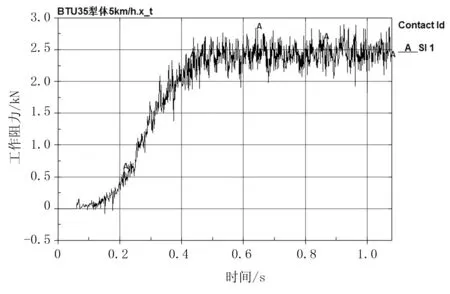
图6 铧式犁在Z方向工作阻力-时间曲线
由图6可知:犁体在切削土壤过程中,其耕作阻力随切削位移由零逐渐增加到一稳定值,最终在一个值附近上下波动。出现上下波动是因为铧式犁导曲线曲率半径不断变化,土壤单元在其上滑动过程中会出现应力波动。用记事本读取rcforce文件,可得耕作阻力数据,如图7所示。
图7 铧式犁耕作阻力部分数据
由图7可以看出:犁体在0.6~1.08s内耕作阻力比较稳定,将0.6~1.08s内的数据导入excel进行处理可得平均阻力。根据同样的方法,可得其它仿真模型的耕作阻力,如表6所示。从表6可以看出:①随着耕作速度的增加,耕作阻力也随着增加。②在3~7km/h内,四次多项式导曲线犁体耕作阻力最小,指数函数导曲线犁体、幂函数导曲线犁体、sin函数相加导曲线导曲线犁体耕作阻力次之,BTU35犁体耕作阻力最大。

表6 仿真分析Z方向阻力列表
通过对犁体导曲线曲率半径变化情况和耕作阻力数据分析可知:四次多项式导曲线犁体耕作阻力较小与其曲率半径出现两次极值点有关,因为此导曲线犁体可使土壤应力场出现波动现象。一方面,土壤沿着此复杂变曲率半径曲面向上滑动时,与曲面接触的土壤单元应力大小会出现上下波动现象,这将降低土壤与曲面的摩擦作用,有利于减小耕作阻力;另一方面,犁体曲面垂直方向土壤单元应力波动可使犁体前方被压实的土壤松碎,最终获得较小阻力。指数函数、幂函数、sin函数相加曲线曲率只出现一次极值点,曲率半径变化相对简单,因此其耕作阻力比四次多项式导曲线犁体高。
4 结论
本文通过MatLab中曲线拟合功能,根据已知点拟合4种不同的曲线,得到4种曲线方程。在SolidWorks中通过方程驱动曲线功能,建立导曲线,基于犁体曲面成型原理,得到犁体三维模型。最终,利用ANSYS/DYNA软件建立犁体-土壤切削有限元模型,对模型进行了数值模拟分析,可得到以下结论:
1)利用ANSYS/DYNA软件可以对犁体-土壤切削有限元模型进行较好的数值模拟。
2)铧式犁导曲线曲率半径变化趋势对铧式犁耕作阻力有影响,通过改变导曲线曲率半径变化规律,可以达到优化犁体曲面、降低耕作阻力及节约能源的目的。
[1] 高尔光.滚子犁的工作阻力[J].粮油加工与食品机械,1974,5(2):11-14.
[2] 高尔光.减少耕作部件牵引阻力的途径[J].粮油加工与食品机械,1980,11(3):33-35.
[3] 李庆中,曾德超.高低速通用犁体曲面的优化设计[J].北京农业工程大学学报,1991,11(2):34-34.
[4] 廖丽.碎土型犁体曲面作业过程的动力学仿真研究[D].南宁:广西大学,2009.
[5] 北京农业工程大学.农业机械学(上册)[M].北京:中国农业出版社,1994:110-111.
[6] 中国农业机械化科学研究院.农业机械设计手册(1版)(上册)[K].北京:中国农业科学技术出版社,2007:191-192.
[7] 庞承妮.1LD-440型深耕犁的仿真研究[D].南宁:广西大学,2005.
[8] 李宝筏.农业机械学[M].北京:中国农业出版社,2003:45-46.
[9] 刘辉.基于LS-DYNA的旱地旋耕刀工作机理研究[D].重庆:西南大学,2012.
The Study on Plow’s Drag Reduction Performance
Xu Ruiliang, Liu Meizhou, Guo Zhijun
(College of Vehicles and Traffic Engineering,Henan University of Science and Technology,Luoyang 471003,China)
Optimizing the plow’s geometric shape to reduce working resistance is an urgent problem to be solved.The directrix shape has an important effect on working resistance according to molding principle. Research on the basis of BTU35,five kinds of plows were set up with five types of directrixes in solidworks.At last,the plows were imported into ANSYS software. Working resistances were obtained when some explicit dynamics analysis had been finished. Simulation experiments that the plow formed by quartic polynomial directrix has better drag reduction performance.The plow reduced working resistance by 3.75 percents in 3km/h,4.56 percents in 7km/h, 3.93 percents on all speed range.Considering the relationship between curvature radius of directrixes and working resistances,we can draw a conclusion that the plow formed by directrix with complex curvature radius has better drag reduction performance.
moldboard plow; working resistance; directrix; ANSYS
2016-01-06
国家自然科学基金项目(51175150)
徐锐良(1966-),男,河南洛阳人,副教授,硕士生导师,(E-mail)lyxrl@163.com。
刘美洲(1988-),男,河南周口人,硕士研究生,(E-mail)472050529@qq.com。
S222.12+1
A
1003-188X(2017)02-0022-05
