基于智能手机声信号的自标定室内定位系统
2017-12-16李贵楠
林 峰 张 磊 李贵楠 王 智,2
1(浙江大学控制科学与工程学院 杭州 310027) 2(工业控制技术国家重点实验室(浙江大学) 杭州 310027)
基于智能手机声信号的自标定室内定位系统
林 峰1张 磊1李贵楠1王 智1,2
1(浙江大学控制科学与工程学院 杭州 310027)2(工业控制技术国家重点实验室(浙江大学) 杭州 310027)
(21532066@zju.edu.cn)
随着室内位置信息服务需求的爆发式增长,对室内定位系统的定位精度、与智能手机的兼容性、成本控制、实时性及数据更新速率等提出了新的要求.基于通用智能手机平台,应用声技术提出了一种新的锚节点自标定与用户定位方法,设计并实现了一套室内定位系统:LinLoc.该系统在声技术TPSN测距模型的基础上,利用到达时间(time of arrival, TOA)估计技术,提出一种高实时性的用户定位方法,实现了厘米级别的用户定位,无需时间同步且与智能手机完全兼容,同时提出一种基于TPSN测距的半定规划(semidefinite programming, SDP)锚节点自标定方法,解决了大规模网络中锚节点的坐标标定及后期维护问题.针对LinLoc系统做了充分的仿真及实验,其结果表明:系统性能良好,定位精度可达0.05~0.3 m,能够在室内环境中为人们提供精确的位置信息服务.
声信号;室内定位;自标定;智能手机;到达时间;时间同步
近年来,以北斗、GPS(global position system)和伽利略为代表的卫星定位技术提供的位置服务(location based service, LBS)为人们的生活提供了极大的便利,已成为日常生活中不可或缺的重要组成部分.由于卫星信号在穿越墙壁时的剧烈衰减,使得卫星定位技术在室内环境使用时受到巨大限制[1].随着大型地下停车场的车辆定位和导航、商场精准营销、交通枢纽人流监测、智慧工厂等室内定位与导航需求的提出[2],加之智能手机多传感、移动计算和大众普及的特性,与智能手机兼容的室内定位与导航技术具有极大的市场潜力与实际应用价值.国内外现有的室内定位技术如表1所示:
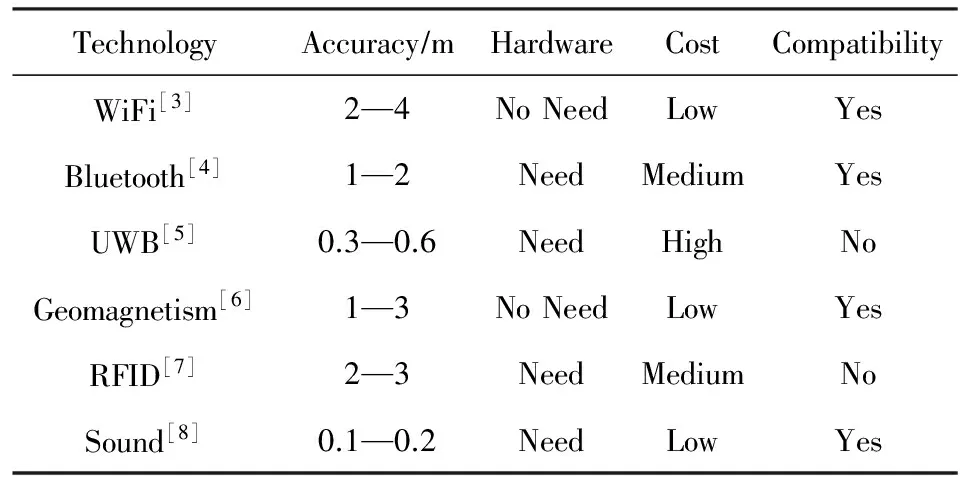
Table 1 Indoor Localization Technologies表1 室内定位技术对比
对比发现,能够与智能手机兼容的只有WiFi、蓝牙、地磁和声技术.WiFi、蓝牙以及地磁技术的定位原理通常采用的是基于网格划分的指纹识别(fingerprint)[9]方法,可达米级精度.蓝牙技术的精度与布设的锚节点密度有关[10].与这些技术相比,基于声音的定位技术具有的优势包括:1)与智能手机完全兼容,无需增加额外的硬件;2)锚节点(beacon node),即用于辅助定位提前布设的信标节点,其硬件仅由麦克风、扬声器、通信模块及采集电路构成[11],具有体积小、结构简单且成本低的特点;3)可达厘米级定位精度.这3方面优势使得基于声音的定位技术成为最具竞争力的室内定位技术之一.
目前国内外基于声技术的定位系统按照定位方式可以分为4类:
1) 基于到达时间差(time difference of arrival, TDOA)的定位系统,如基于无线电波及超声波信号到达时间差的Cricket系统[12]和基于锚节点严格时钟同步的ASSIST系统[13];
2) 基于到达时间(time of arrival, TOA)的定位系统,如基于声信号调制和解调原理及严格时钟同步Guoguo系统[14]和超声波厘米级测距的SpiderBat系统[15];
3) 基于到达方向角(direction of arrival, DOA)的定位系统,如整合了一个传感器阵列[16]的ENSBox系统[17];
4) 基于多普勒效应的Swadloon定位系统[18].
对上述系统进行总结可以发现,要将基于声技术的室内定位系统推向实际场景,需要解决的问题包括:1)锚节点之间的高精度时钟同步,成本较高且需要定期维护;2)系统中锚节点自身位置的精确标定.随着系统布设规模的扩大,人工量测会极大地增加系统成本并引入累积量测误差[19].针对上述高精度时间同步和锚节点人工标定带来的挑战,本文设计并实现一种室内定位系统:LinLoc.该系统无需额外的时间同步和自标定硬件成本,其创新点包括3个方面:
1) 提出一种免除时钟同步的高实时性TOA定位方案,仅需一次交互便可估计出用户手机到达所有锚节点的精确TOA值,实现高精度定位;
2) 提出一种锚节点高精度自标定方案,除锚节点本身不增加其他任何硬件设备支持,仅需极少量已知锚节点的绝对位置的先验条件下,实现所有未知锚节点绝对位置的高精度一次性自标定;
3) 直接基于智能手机平台实现,与智能手机完全兼容,无需在手机中增加任何其他硬件,支持Android及IOS操作系统.
1 系统方案
1.1 总体方案
LinLoc室内定位系统的总体方案设计为3个阶段:1)锚节点的自标定,利用本文提出的高精度自标定方案(1.2节详述),通过极少量的人工标定锚节点的绝对坐标得到其他未知锚节点的绝对坐标;2)用户智能手机与锚节点的信息交互,用户智能手机提出定位请求并发射声信号,锚节点网络接收到请求后发射声信号完成交互(1.3节详述);3)定位过程,服务器处理第2阶段中用户智能手机端及锚节点网络所接收到的声音信号,精确估计TOA值并由定位算法计算得到用户位置,再通过WiFi网络将定位结果反馈至用户智能手机进行显示.总体方案设计的流程图如图1所示:
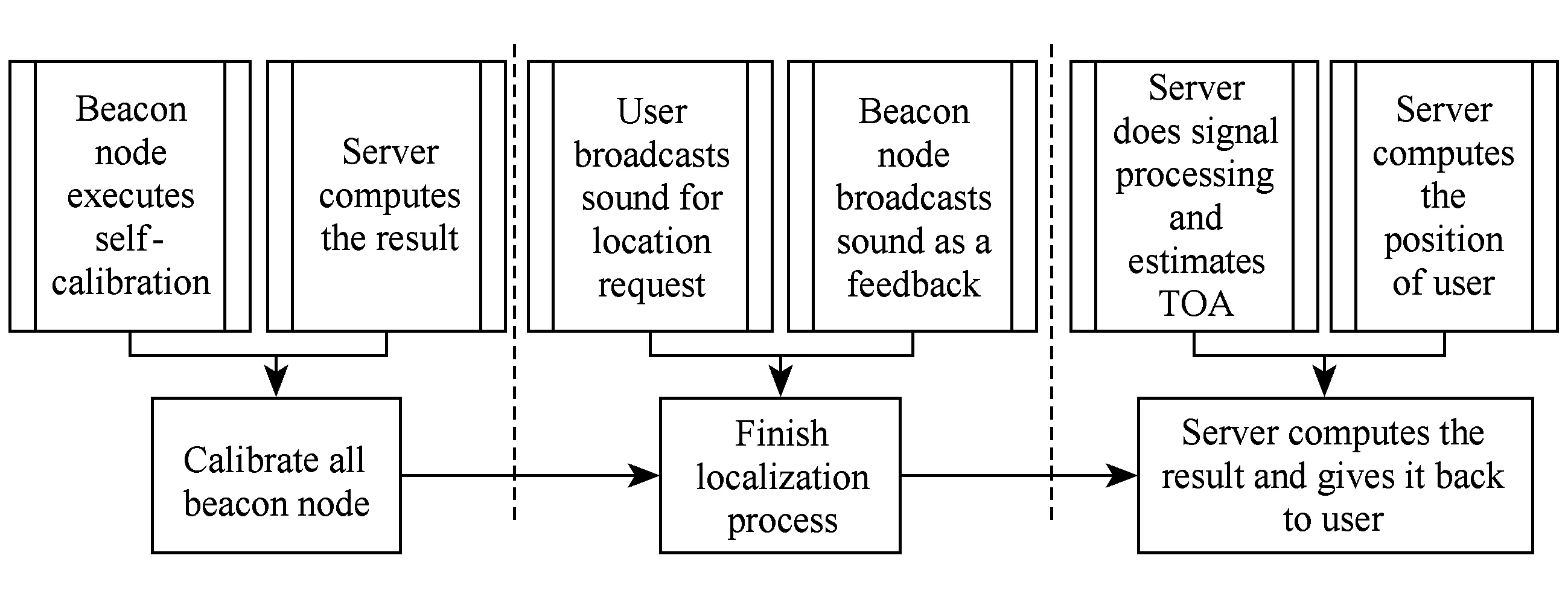
Fig. 1 The flow diagram of system solution图1 系统方案流程图
本系统受启发于传感网络时钟同步协议(time synchronization protocol for sensor networks, TPSN)[20],采用一种基于声技术的交互式测距方法(TPSN测距模型),该方法得到1个距离量测需要2次声信号广播,可规避测距过程的时钟同步问题(第2节详述).系统中锚节点的自标定方案与目标用户的定位方案均是以此为基础的应用和扩展.为避免传统的迭代算法(如梯度下降、牛顿法等)对初始值的依赖而收敛到局部最优解的问题[21],本文采用基于网格划分的最大似然估计算法来定位用户智能手机.
1.2 锚节点自标定方案
现有的基于声技术的室内定位系统,如Guoguo,ASSIT,Swadloon系统等,均需预先布设锚节点网络,并采用人工量测的方法对锚节点进行精确地标定.然而在实际的应用中,随着锚节点网络规模的扩大,需要量测的锚节点数量也随之增多,此时人工量测的工作量和维护的成本也将随之剧增.针对上述问题,本文提出一种自标定方案应用于LinLoc系统.
LinLoc系统锚节点由微处理器、麦克风、扬声器、WiFi模块及支撑电路组成.各个锚节点通过WiFi模块连入同一个局域网,由服务器统一控制数据和指令的传输.在不增加任何硬件设备的情况下,通过每2个锚节点之间进行TPSN测距获得每2个锚节点之间的距离量测值.对于有N个锚节点的系统,所有锚节点完成两两交互共需要N(N-1)次发声,耗时巨大.针对上述问题,LinLoc系统仅通过1次遍历共N次发声便可以得到锚节点两两之间的距离量测.具体地,服务器控制锚节点信号采集模块打开,各锚节点按照节点编号以固定时间间隔依次发声,在最后一个锚节点发声完毕之后关闭信号采集模块,完成网络声信号的采集.在获得距离量测值并已知少量锚节点绝对位置的前提下,本文提出了一种基于TPSN测距的SDP自标定模型一次性估计出所有未知锚节点的绝对位置坐标(第3节详述).LinLoc系统自标定方案流程图如图2所示:
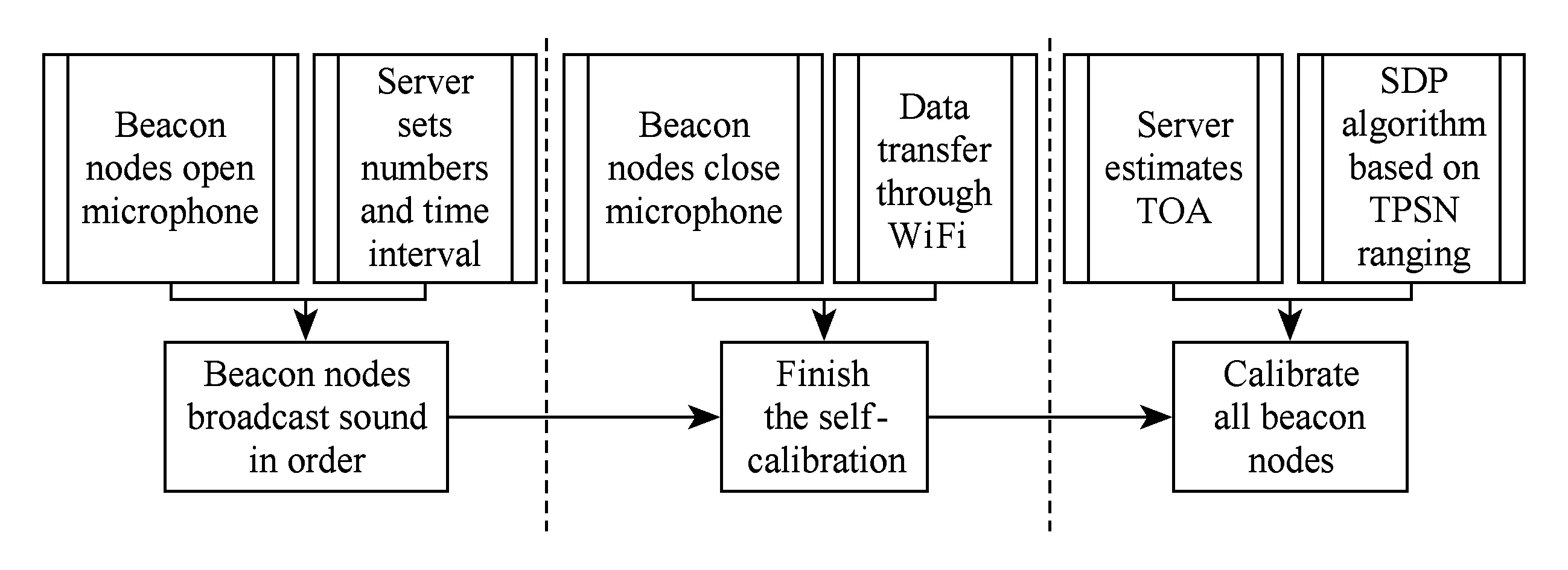
Fig. 2 The flow diagram of self-calibration solution图2 自标定方案流程图
1.3 用户智能手机定位方案
LinLoc系统采用的是基于TOA的3边定位来标定用户位置,即需要获得用户智能手机到至少3个锚节点的距离量测.设锚节点的个数为N,一次定位过程便需要2N次声信号广播,十分耗时.为了提高实时性需要改进方案,若将自标定方案应用到用户定位中来,一次定位过程只需要N+1次声信号广播.然而随着N的增长,更新速率将会下降,所以需要进一步改进.为了提高定位更新速率、缩短信号交互时间,本文提出一种高实时性的目标定位方案,其一次定位的耗时不随锚节点的规模变化,仅需要用户智能手机与锚节点网络中的某一个节点进行1次交互(共2次声信号的广播)便可以获得所有距离量测值.其原理图如图3所示:
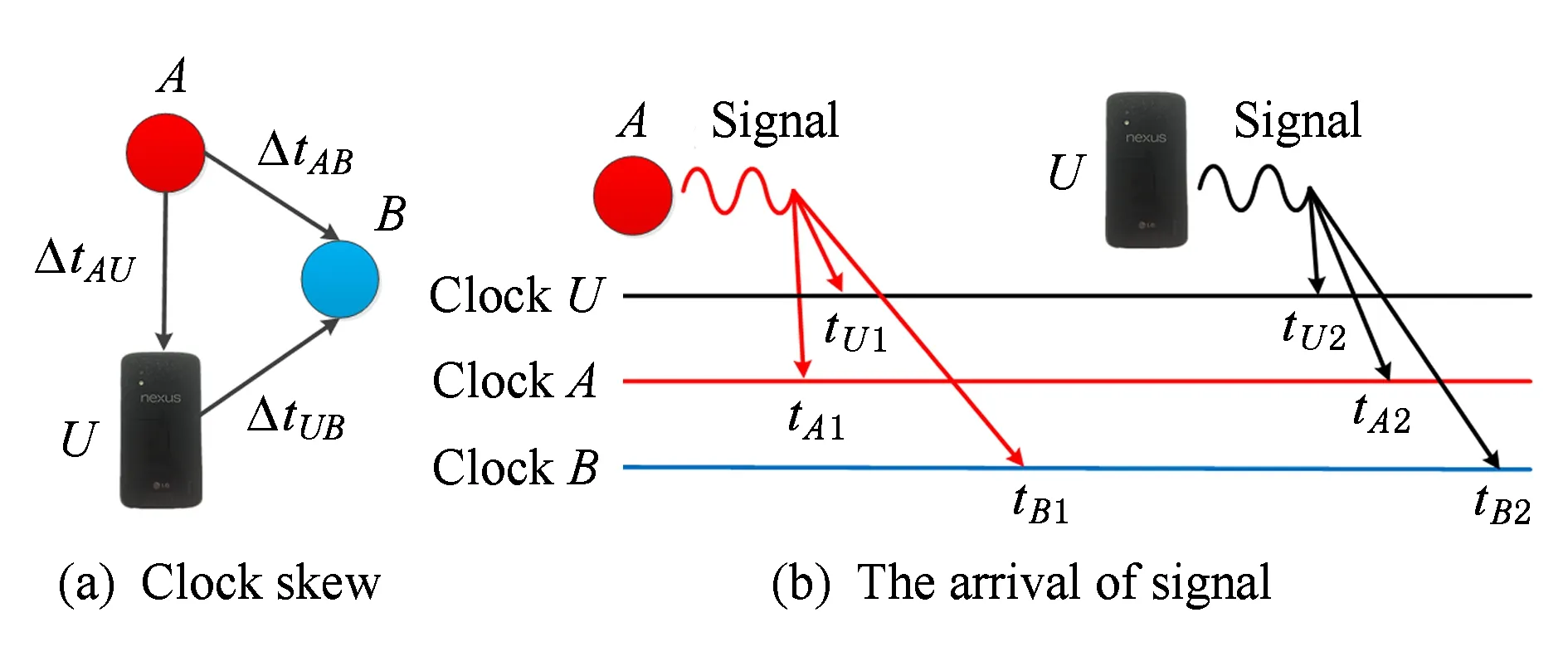
Fig. 3 The principle of localization for user’s smartphone图3 用户智能手机定位方案原理图
图3中A,B分别是网络中2个锚节点,其中A是与用户智能手机U交互的节点,A,B,U的时钟均未同步,ΔtAB,ΔtAU,ΔtUB分别表示A与B,A与U,U与B之间的时钟偏差,三者满足:
ΔtAB=ΔtAU+ΔtUB.
用户手机U与锚节点A的一次交互过程如图3所示:用户手机U先广播声信号请求定位,U,A,B各自记录信号在本地时钟的到达时刻tU1,tA1,tB1,然后锚节点A广播一个声信号作为反馈,U,A,B各自记录信号在本地时钟的到达时刻为tU2,tA2,tB2.其中为了表示方便,假设用户智能手机U到锚节点B的距离大于到锚节点A的距离,锚节点A到锚设节点B的距离大于到智能手机U的距离.即tB1>tA1,tB2>tU2.由锚节点B分别接收到用户手机U与锚节点A广播的信号可得:
(1)
其中,DAB为锚节点A,B之间的距离,由于锚节点A,B的绝对坐标已知,所以DAB已知;Dx为用户手机U与锚节点B的距离,是需要估计的值.由用户手机U与锚节点A的交互过程可以得到:
(2)
其中,DAU为锚节点A与用户手机U之间的距离,v是声速.由式(2)可得:
(3)
将式(1)及式(3)带入ΔtAB=ΔtAU+ΔtUB,化简后可以得到:

(4)
可以看到,DAU由TPSN测距得到,DAB已知,将tA1,tA2,tB1,tB2带入式(4)便可以得到Dx,即在用户智能手机U与锚节点A交互的同时,可以通过式(4)得到用户智能手机U与锚节点B的距离.由此推广到锚节点网络中的所有锚节点,便可以仅通过一次交互计算出用户手机U到所有锚节点的距离,并同时规避掉同步问题.
由此方案获得距离量测值之后,下一步对用户智能手机位置进行求解.设场景中共有n个锚节点,(xi,yi)表示第i个锚节点的绝对位置坐标,其中i=1,2,…,n,用户智能手机的位置坐标记为(x,y),di为用户智能手机到锚节点i的距离.考虑距离量测值中的误差因素,可以得到:
(5)
其中,εi为用户智能手机到锚节点i的距离量测误差,假设εi服从均值为0、方差为σ2的高斯分布,即εi~N(0,σ2),由最大似然估计方法可以得到代价函数J(x,y)为
对式(6)中的无约束优化问题,LinLoc系统采用基于网格划分的最大似然估计搜索求解未知目标的坐标(x,y)的估计值:

(7)
Y={ystart:β:yend},
其中,X和Y分别表示横轴及纵轴的搜索范围[xstart,xend],[ystart,yend];搜索步长分别为α和β.
2 TPSN测距
2.1 TPSN测距模型
图4为以2部通用智能手机为例的TPSN测距模型的原理图.A,B这2台智能手机各自的时钟为ClockA与ClockB,手机A在自己时钟的时刻tA0发送1个声信号,手机B在自己时钟的时刻tB1接收到该信号,延迟一定时间之后,手机B在自己时钟的时刻tB0反馈1个声信号,手机A在自己时钟的时刻tA2接收到该信号.
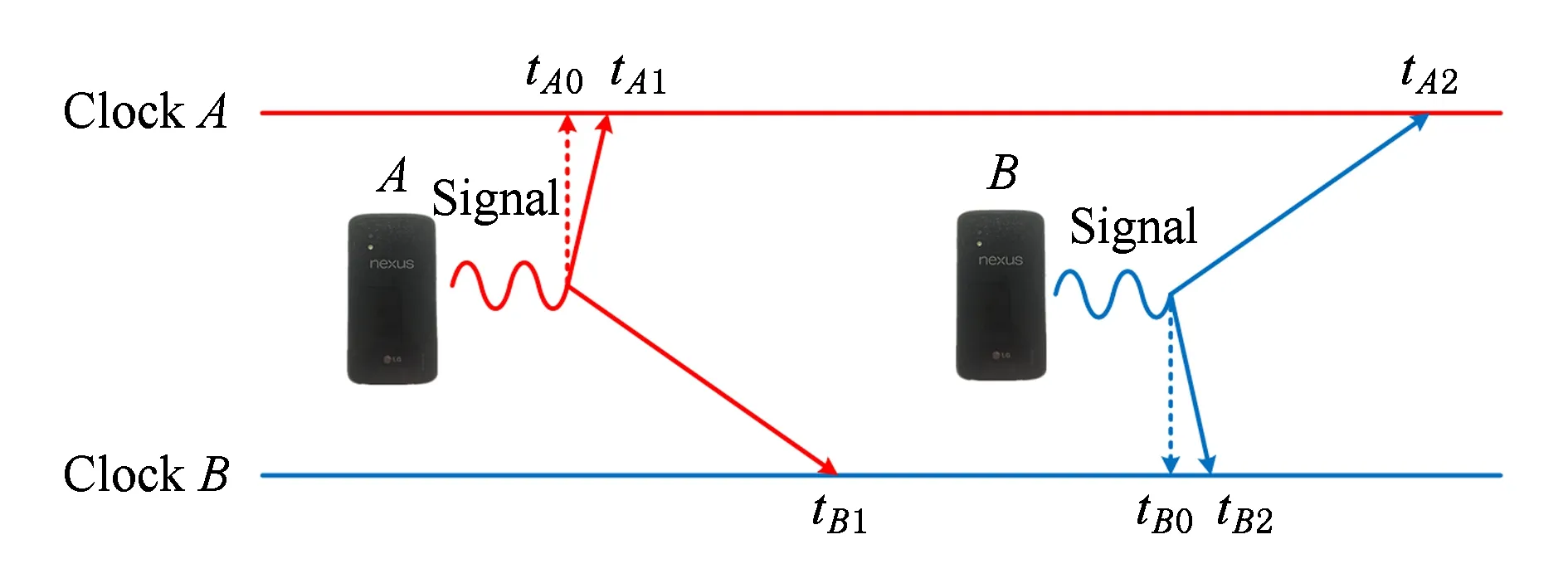
Fig. 4 The principle of TPSN ranging model图4 TPSN测距模型原理
LinLoc系统采用的是基于样本计数的时延估计方法,即tdelay=n/fs,其中n为样本点数,fs为采样频率.值得注意的是:考虑到手机自身尺寸的影响,估计得到的发送信号的时间往往是tA1与tB2,与真实发送时间tA0与tB0存在一定的误差,其原因是通用智能手机自身麦克风和扬声器之间存在7~10 cm的间隔,产生的误差在0.2~0.3 ms之间,该误差相比于距离量测D可以忽略不计.因此,在实际使用中,可以将tA1与tB2近似为真实的发送时刻.在手机A,B时钟预先同步的情况下,距离可以表示为
(8)
将式(8)中2个等式相加整理后得到:
(9)
其中,v是声速.从式(9)中可以看出,此方法可以成功规避掉测距过程中的时钟同步问题.
2.2 声信号的选取
通用智能手机所支持的声音信号的频段为200 Hz~20 kHz[22],为了选取合适频率范围的声信号,本文对智能手机Google Nexus4的扬声器及麦克风频率响应进行测试.2部手机在办公室环境下间距1 m放置,其中1部手机连续播放200 Hz~20 kHz的声信号;另一部手机通过麦克风以44.1 kHz的频率进行采集,得到的信号强度随频率变化的结果如图5所示,其中为了使图像更直观便于分析,纵坐标是根据幅频响应中幅度最大值进行归一化之后的结果.
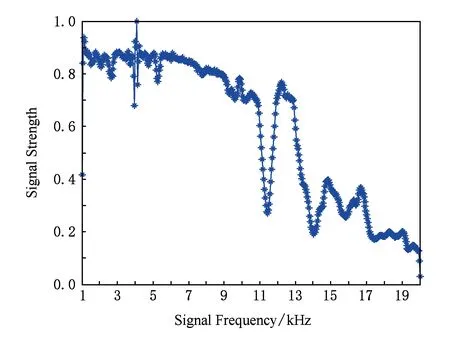
Fig. 5 Signal strength change with singnal frequency图5 信号强度随信号频率变化图
从图5中可以看到,10 kHz以下具有较好的频率响应,采用此频段的信号可以获得更大的测距范围以及更高的测距精度.但是从人体工程学的角度出发,应选用人耳不敏感的15 kHz以上的高频段信号.综合考虑,LinLoc系统使用3~8 kHz频段用于锚节点的自标定以保证较高的精度,选取16~20 kHz频段用于用户智能手机定位,以提升用户体验.
在信号的调制形式上选择线性调频信号(linear frequency modulated, LFM)来有效抑制背景噪声[23],有限长度的LFM信号的表达式为
(10)
其中,t∈[0,T],A(t)为信号幅度,T为信号时间长度,f0为载频,μ0为调频率,φ0为初始相位.
2.3 声信号的检测

(11)
且x1(t)与x2(t)的互相关函数为

(12)

(13)
由傅里叶变换及卷积定理得到频域表达式:
(14)
基于互相关技术的LFM信号检测如图6所示,可以明显看到经过互相关处理之后,在信号到达时刻有明显尖峰,能够得到较为精确的估计时延.
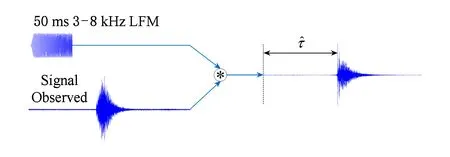
Fig. 6 Using cross correlation to detect the LFM signal图6 互相关检测LFM信号示意图
3 锚节点自标定
3.1 锚节点网络设计
Guoguo系统、ASSIT系统以及文献[25]等对于锚节点的布设均根据房屋的结构采用环绕式布局,如图7(a)(b)所示.对于一般的矩形房顶结构,在房顶墙面的4个角分别布设1个锚节点,并结合系统实际精度情况增加锚节点个数.考虑到LinLoc系统无需同步仅需要1次交互的特点,并结合TPSN测距的高精度高稳定特性,本文仅需在中间区域多增加1个锚节点来作为与用户交互的锚节点,如图7(c)结构所示.图7中圆点表示锚节点,其中方点表示系统中与用户智能手机交互的锚节点.交互节点无需完全在中央位置,可以结合房屋实际情况而定.
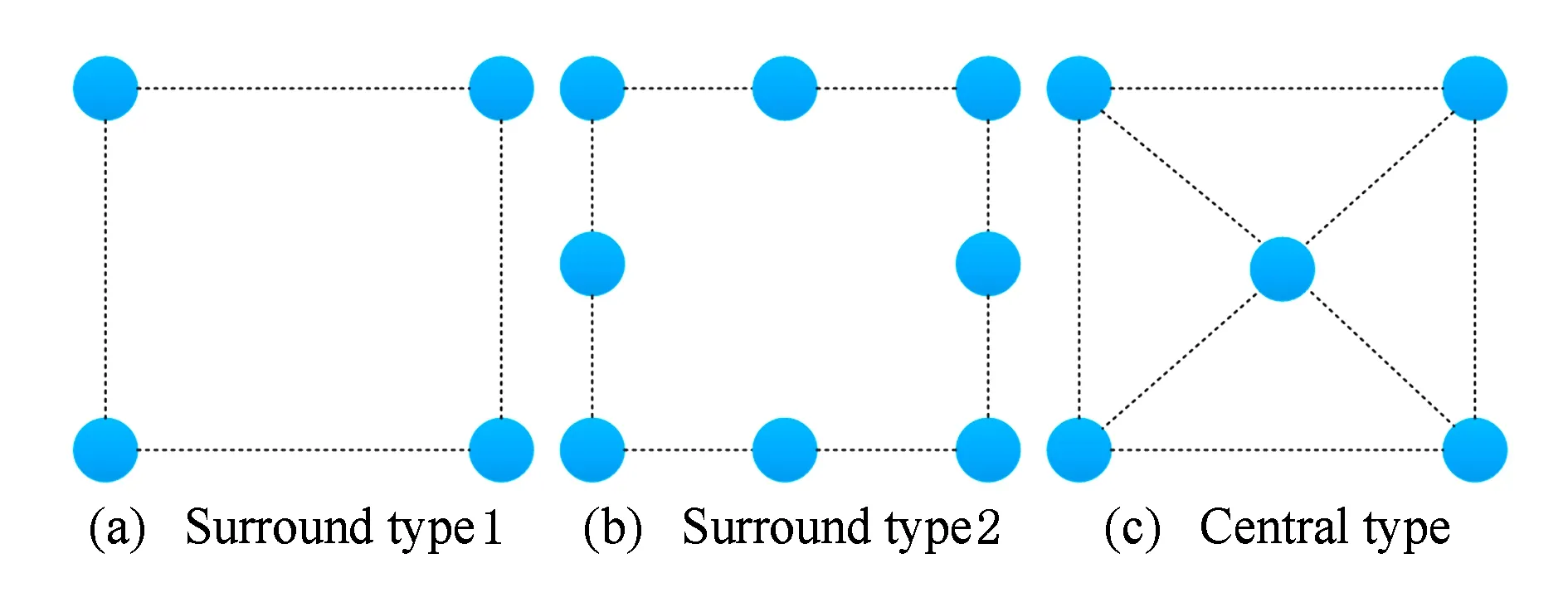
Fig. 7 Anchor network design图7 锚节点网络设计
3.2 基于TPSN测距的SDP自标定模型
(15)
其中,Nα表示已知节点和未知节点间(k,j)的连通集合,Nx表示未知节点之间(i,j)的连通集合.
在不考虑误差的情况下,用X=(x1,x2,…,xn)来表示待求的未知节点坐标,则X是一个2×n的矩阵.设ei表示长度为n的单位向量,即第i位为1,其他均为0.那么问题可以进一步描述为
findX∈2×n,Y∈n×n,
s.t. (ei-ej)TY(ei-ej)=,∀(j,i)∈Nx,
∀(j,k)∈Na,
Y=XTX,
(16)
其中,二次约束Y=XTX并非是一个凸集,可以通过松弛技术,将Y=XTX松弛为Y≻=XTX,从而将其转化为一个SDP问题[26]:
findZ∈(n+2)×(n+2),
s.t. (0;ei-ej)TZ(0;ei-ej)=,∀(j,i)∈Nx,
(ak;-ej)TZ(ak;-ej)=,∀(j,k)∈Na,
≻=0,
(17)
在真实的TPSN测距场景中,由于多径效应、噪声干扰、采样率波动、响应延迟等相关因素的影响,量测误差是一个不容忽视的问题.假设已知节点αk与未知节点xj之间的量测误差为ej k,未知节点xi和未知节点xj之间的量测误差为ei j.那么可以将引入误差之后的距离量测描述为

(18)
同时假设误差ej k,ei j均服从均值为0、方差为σ2的正态分布,即ej k~N(0,σ2),ei j~N(0,σ2),且相互独立.则在已知距离量测信息的情况下,待估量X=(x1,x2,…,xn)的最大似然估计

(19)
将这个问题描述成优化问题并结合之前的松弛技术,将其松弛的SDP问题表达为

(20)

4 仿真及实验
4.1 锚节点自标定仿真分析
为了验证基于TPSN测距的SDP节点自标定模型的精度,本文首先通过仿真来分析自标定算法的效果.仿真场景设置为:在2×2的区域内,随机散布20个未知节点,即N=20,且所有噪声服从均值为0、方差为σ2的独立高斯分布.在仿真中使用控制变量法,首先保持σ不变(σ=0.2),研究已知节点的个数M对定位性能的影响,M分别取5,10,20.为了消除节点分布对定位结果的影响,仿真实验中的已知节点都按照M的个数随机分布在实验场景内.进一步,保持已知节点个数不变(M=5),分别将噪声方差设为σ=0.1,0.2,0.4来研究噪声对自标定性能的影响.上述仿真结果都是基于1 000次蒙托卡洛方法.
仿真中使用2个自标定性能衡量标准:


2) 平均误差(mean error,me).定义n个未知节点的平均误差为
(22)

如图8(a)所示结果,在保证噪声σ=0.2不变的情况下,随着已知节点M个数的增加,均迹avg_trace和平均误差mean_er的值逐渐减小.从直观的定位图上来看,也可以明显地看出,随着已知节点M个数的增加,定位性能也越来越好,当M增加到一定程度时,定位性能的提升变得平缓.因此在实际的应用过程中,可根据实际的精度要求来调整已知节点的个数M.如图8(b)所示结果,在保证已知节点个数M=5不变情况下,随着噪声σ值的增加,均迹avg_trace和平均误差mean_er的值逐渐增大,从直观的定位图上也可以明显看出,随着噪声σ值的增加,定位性能逐渐变差.综合来说,在真实的应用场景中,需要根据实际的噪声强度以及分布,综合考虑布设已知节点的个数M来保证实际需要的定位性能.
4.2 锚节点自标定实验
为使实验更具一般性,本文采用智能手机Google Nexus4作为实验的锚节点,实验中选取的3~8 kHz频率范围的LFM信号对应式(10)中的具体参数为:T=50 ms,f0=3 kHz,μ0=100 kHz/s,φ0=0.实验设计如图9(a)所示:在7 m×7 m的室内环境中,在屋顶布设9个锚节点,其中选定4个锚节点作为已知节点,其余5个为未知节点.9个锚节点通过WiFi连入同一局域网,数据通过局域网传输至服务器端进行互相关(CC)时延估计、TPSN距离估计以及SDP自标定算法未知节点坐标估计.每个实验重复100次,统计测距以及定位结果用于性能分析.实验场景如图9(b)所示,其中布设的9个锚节点用圆圈标出,真实位置使用激光测距仪精确标定,实验环境温度为27.4℃,湿度为62%,噪声为62.4 dB.
实验可以获得100组每2个节点之间的距离估计结果,随机选择4个节点作为已知坐标的锚节点,剩下5个节点为未知坐标的锚节点,可以得到未知节点100组SDP模型的自标定结果.用每次实验的平均误差作为评价标准,定义TPSN测距平均误差为
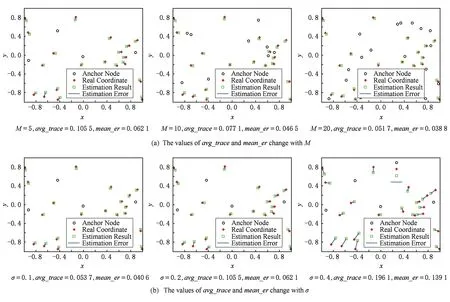
Fig. 8 The simulation result of self-calibration图8 自标定仿真结果
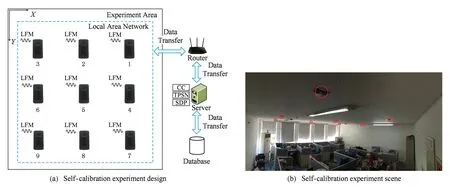
Fig. 9 Self-calibration experiment design and experiment scene图9 自标定实验设计及实验场景
(23)
(24)
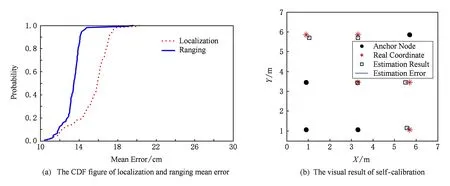
Fig. 10 The result of self-calibration experiments图10 自标定实验结果
统计实验结果的平均误差如图10所示.从图10(a)自标定误差以及测距误差的CDF图可以看到,在进行的这100次实验中,测距误差在14 cm以内的置信度为90%,在20 cm以内的置信度为100%,达到了一个较高的测距精度.自标定误差在17 cm以内的置信度为90%,在21 cm以内的置信度为100%,同样达到了一个较高的定位精度.这100次实验的平均测距误差为13.4 cm,平均自标定误差为15.49 cm.为了获得一个更加直观的定位性能评价,图10(b)取未知节点自标定结果的平均坐标绘制出直观图.

Fig. 11 Smartphone localization experiment approach and scene图11 用户智能手机定位实验方案和场景
4.3 用户智能手机定位实验
如图11(a)所示,为了验证LinLoc系统对于用户智能手机的定位精度,本节采用1.3节所述定位方案以及3.1节锚节点网络拓扑结构,设计了实验方案.为更具一般性,用户智能手机以及锚节点均采用Google Nexus4,用户定位实验选取16~20 kHz频率范围的LFM信号对应式(10)中的具体参数为:T=50 ms,f0=16 kHz,μ0=80 kHz/s,φ0=0.实验场景如图11(b)所示,实验环境数据:温度为28.1℃,湿度为63%,噪声为64.2 dB.
实验中在运动轨迹上一共有35个测试点,每个测试点进行5次定位,按照人工精确标定和使用自标定方案标定所有锚节点坐标可以得到2种不同的用户定位结果,分别称作直接定位结果和使用自标定的定位结果.通过对比直接定位结果与测试点真实坐标可以评价LinLoc系统定位性能的好坏,通过对比直接定位结果与使用自标定的定位结果可以衡量自标定方案在实际应用中性能的优劣.取每一个测试点上5次定位结果的中值中作为最终定位结果,绘制对比图如图12(a)所示,计算每一次实验的定位误差绘制CDF图如图12(b)所示.
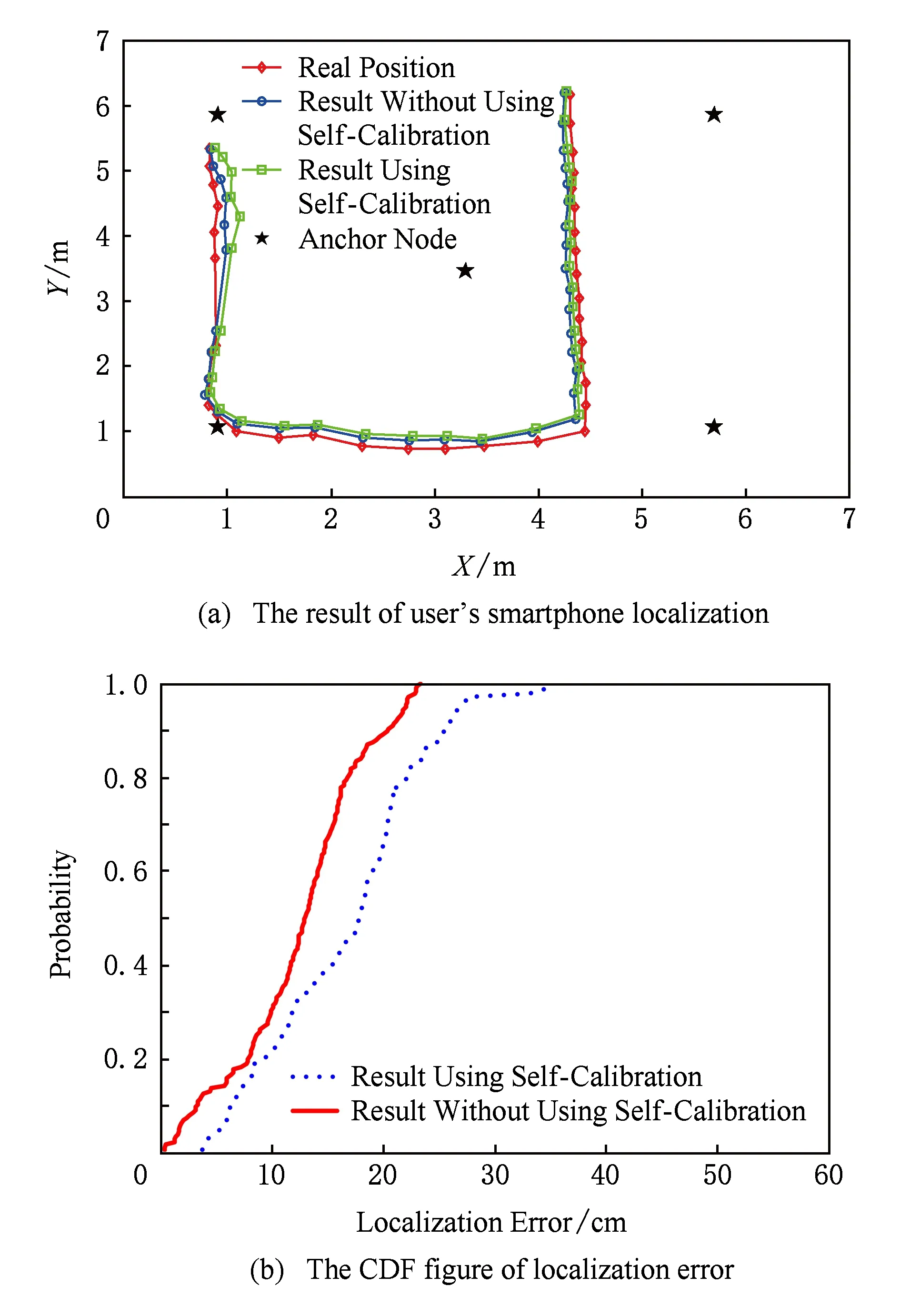
Fig. 12 The result of user’s smartphone localization图12 用户智能手机定位实验结果
从图12(a)直观分析,LinLoc系统对用户智能手机的定位精度与激光测距仪标定的测试点的真实位置相差无几,系统定位性能较好.使用自标定对用户实际定位精度几乎没有影响,说明了自标定在实际应用时的良好性能.定量分析来看,35个测试点的直接定位结果的平均定位误差为12.39 cm,最大误差为22.91 cm,最小误差为1.22 cm.使用自标定方案,35个测试点的平均误差为16.66 cm,最大误差为35.78 cm,最小误差为5.07 cm.对比发现,锚节点自标定使LinLoc系统的平均定位精度仅仅下降了4.27 cm,再次证明了其良好性能.
从图12(b)绘制的定位误差的CDF图来看,对于直接定位结果,定位误差在21 cm以内的置信度为90%,在24 cm以内的置信度为100%,对于使用自标定的情况,定位误差在22 cm以内的置信度为80%,在26 cm以内的置信度为90%,在36 cm以内的置信度为100%,由此可以看到,LinLoc系统可以保证一个较高的用户智能手机定位精度,性能良好.
5 结 论
本文研究基于通用智能手机平台,应用声技术解决室内环境下用户的高精度定位问题.1)本文从保证实用性和定位精度的角度出发,详细介绍了系统方案设计以及相关技术机理,包括TPSN测距、互相关检测技术和定位算法的原理,并通过对智能手机麦克风频响进行测试讨论了信号频率范围的和信号调制方式的选取.2)针对于大规模锚节点网络的自标定问题,本文提出一种基于TPSN测距的SDP高精度自标定模型,除锚节点本身不增加其他任何硬件设备支持,在仅已知少量锚节点的绝对位置的先验条件下,实现所有未知锚节点的高精度一次性自标定.同时,针对用户智能手机定位问题,提出一种免除时钟同步的高实时性TOA定位方案,仅需一次声信号交互便可以精确估计出用户手机到所有锚节点的TOA值,实现高精度用户定位.3)本文基于通用智能手机平台设计并实现了LinLoc系统,并通过仿真和实验充分验证了系统的良好性能.
[1]Kaplan E D. Understanding GPS: Principles and application[J]. Artech House Mobile Communications, 2005, 59(5): 598-599
[2] Liu Hui, Darabi H, Banerjee P, et al. Survey of wireless indoor positioning techniques and systems[J]. IEEE Trans on Systems Man & Cybernetics, 2007, 37(6): 1067-1080
[3] Wu Chenshu, Yang Zheng, Liu Yunhao, et al. WILL: Wireless indoor localization without site survey[J]. IEEE Trans on Parallel & Distributed Systems, 2013, 24(4): 64-72
[4] Pei Ling, Chen Ruizhi, Liu Jingbin, et al. Inquiry-based bluetoothindoor positioning via RSSI probabilitydistributions[C] //Proc of the 2nd Int Conf on Advances in Satellite & Space Communications. Piscataway, NJ: IEEE, 2010: 151-156
[5] Zhang Cemin, Kuhn M, Merkl B, et al. Accurate UWB indoor localization system utilizing time difference of arrival approach[C] //Proc of the 4th Radio and Wireless Symp. Piscataway, NJ: IEEE, 2006: 515-518
[6] Zhang Chi, Subbu K P, Luo Jun, et al. GROPING: Geomagnetism and crowd sensing powered indoor navigation[J]. IEEE Trans on Mobile Computing, 2015, 14(2): 387-400
[7] Saab S S, Nakad Z S. A standalone RFID indoor positioning system using passive tags[J]. IEEE Trans on Industrial Electronics, 2011, 58(5): 1961-1970
[8] Mandal A, Lopes C V, Givargis T, et al. Beep: 3D indoor positioning using audible sound[C] //Proc of the 1st Consumer Communications and Networking Conf. Piscataway, NJ: IEEE, 2005: 348-353
[9] Kaemarungsi K, Krishnamurthy P. Modeling of indoor positioning systems based on location fingerprinting[C] //Proc of the 3rd Int Symp on Optical Science & Technology. Piscataway, NJ: IEEE, 2004: 1012-1022
[10] Wang Rui, Zhao Fang, Peng Jinhua, et al. Combination of WiFi and bluetooth for indoor localization[J].Journal of Computer Research and Development, 2011, 48(2): 28-33 (in Chinese)(王睿, 赵方, 彭金华, 等. 基于WiFi和蓝牙融合的室内定位算法[J]. 计算机研究与发展, 2011, 48(2): 28-33)
[11] Lymberopoulos D, Liu Jie, Yang Xue, et al. A realistic evaluation and comparison of indoor location technologies: Experiences and lessons learned[C] //Proc of the 14th Int Conf on Information Processing in Sensor Networks. New York: ACM, 2015: 178-189
[12] Misra P, Jha S, Ostry D. Improving the coverage range of ultrasound-based localization systems[C] //Proc of the 12th Wireless Communications and Networking Conf. Piscataway, NJ: IEEE, 2011: 605-610
[13] Hoflinger F, Hoppe J, Zhang R, et al. Acoustic indoor-localization system for smart phones[C] //Proc of the 11th Int Multi-Conf on Systems,Signals & Devices. Piscataway, NJ: IEEE, 2014: 1-4
[14] Liu Kaikai, Liu Xinxin, Li Xiaolin. Guoguo: Enabling fine-grained indoor localization via smartphone[C] //Proc of the 11th Int Conf on Mobile Systems, Applications, and Services. New York: ACM, 2013: 235-248
[15] Oberholzer G, Sommer P, Wattenhofer R. SpiderBat: Augmenting wireless sensor networks with distance and angle information[C] //Proc of the 10th Int Conf on Information Processing in Sensor Networks. Piscataway, NJ: IEEE, 2011: 211-222
[16] Yu Kai, Yin Ming, Zong Xiaojie, et al. Compressive sensing based wireless array and collaborative signal processing method[J].Journal of Computer Research and Development, 2014, 51(1): 180-188 (in Chinese)(余恺, 印明, 宗晓杰, 等. 基于压缩感知的无线阵列及协同信号处理[J]. 计算机研究与发展, 2014, 51(1): 180-188)
[17] Girod L, Lukac M, Trifa V, et al. The design and implementation of a self-calibrating distributed acoustic sensing platform[C] //Proc of the 4th Int Conf on Embedded Networked Sensor Systems. New York: ACM, 2006: 71-85
[18] Huang Wenchao, Xiong Yan, Li Xiangyang, et al. Swadloon: Direction finding and indoor localization using acoustic signal by shaking smartphones[J]. IEEE Trans on Mobile Computing, 2015, 14(10): 2145-2157
[19] Shao Huajie, Zhang Xiaoping, Wang Zhi. Efficient closed-form algorithms for AOA based self-localization of sensor nodes using auxiliary variables[J]. IEEE Trans on Signal Processing, 2014, 62(10): 2580-2594
[20] Ganeriwal S, Kumar R, Srivastava M B. Timing-sync protocol for sensor networks[C] //Proc of the 2nd Int Conf on Embedded Networked Sensor Systems. New York: ACM, 2004: 138-149
[21] Ye Shiwei, Zheng Hongwei, Wang Wenjie, et al. Nonlinear gradient descent algorithm theories and its analysis for the stability of Hopfield network[J].Journal of Computer Research and Development, 2004, 41(2): 317-324 (in Chinese)(叶世伟, 郑宏伟, 王文杰, 等. 非线性梯度下降算法理论及其对Hopfield网络稳定性的分析[J]. 计算机研究与发展, 2004, 41(2): 317-324)
[22] Peng Chunyi, Shen Guobin, Zhang Yongguang, et al. BeepBeep: A high accuracy acoustic ranging system using COTS mobile devices[C] //Proc of the 5th Int Conf on Embedded Networked Sensor Systems. New York: ACM, 2007: 1-14
[23] Barbarossa S. Analysis of multicomponent LFM signals by a combined Wigner-Hough transform[J]. IEEE Trans on Signal Processing, 1995, 43(6): 1511-1515
[24] Sarwate D V, Pursley M B. Crosscorrelation properties of pseudorandom and related sequences[J]. Proceedings of the IEEE, 1980, 68(5): 593-619
[25] Canclini A, Antonacci F, Sarti A, et al. Acoustic source localization with distributed asynchronous microphone networks[J]. IEEE Trans on Audio Speech & Language Processing, 2013, 21(2): 439-443
[26] Biswas P, Liang T C, Toh K C, et al. Semide finite programming approaches for sensor network localization with noisy distance measurements[J]. IEEE Trans on Automation Science & Engineering, 2010, 3(4): 360-371
AcousticSelf-CalibratingIndoorLocalizationSystemviaSmartphones
Lin Feng1, Zhang Lei1, Li Guinan1, and Wang Zhi1,2
1(CollegeofControlScienceandEngineering,ZhejiangUniversity,Hangzhou310027)2(StateKeyLaboratoryofIndustrialControlTechnology(ZhejiangUniversity),Hangzhou310027)
Growing needs for the indoor location based service (ILBS) bring newer and higher requirements for indoor localization systems, such as high accuracy, hardware compatibility, low cost for commercial application, instantaneity and fast data update rate etc. In order to meet those requirements with commercial smartphone platform, we design an indoor localization system named LinLoc, which includes a new self-calibrating approach and a new localization method. Based on TPSN ranging, LinLoc applies time-of-arrival (TOA) method with acoustic signals to achieve real-time users’ localization on normal commercial smartphone platform. With no extra time synchronization need, it can achieve centimeter-level accuracy. Furthermore, we propose a new self-calibrating approach based on acoustic TPSN ranging and semidefinite programming (SDP) algorithm. Through the interaction of every anchor nodes in the network, the new approach helps to solve the problem of self-calibrating in large-scale anchor network, and also helps to remove the heavy maintenance requirements afterwards. Then, LinLoc system which consists of a special-designed anchor network, smartphones installed with real-time app inside, and a backend server for processing is implemented. Simulations and experiments have been performed. The results show that LinLoc has nice indoor localization performance and its accuracy can be 0.05~0.3 m, which provides accurate ILBS for users.
acoustic signal; indoor localization; self-calibration; smartphones; time-of-arrival (TOA); time synchronization
2016-09-28;
2017-04-27
国家自然科学基金项目(61273079,61611130127);工业控制技术国家重点实验室开放课题(ICT1600199,ICT1600213)
This work was supported by the National Natural Science Foundation of China (61273079, 61611130127) and the Open Project of State Key Laboratory of Industrial Control Technology (ICT1600199, ICT1600213).
王智(wangzhizju@gmail.com)
TP311

LinFeng, born in 1992. Master. His main research interests include indoor localiza-tion technology, signal processing and wireless sensor network.

ZhangLei, born in 1985. PhD.His main research interests include acoustic signal processing, time-frequency analysis, indoor localization and tracking of mobile target.

LiGuinan, born in 1992. Master. His main research interests include array signal processing, sensor network.

WangZhi, born in 1969. PhD, associate professor, PhD supervisor. Committee member for CCF Internet of Thing and China National Technical Committee of Internet of Thing. His main research interests include localization and tracking of mobile target, compressive sensing and statistical information processing.
