基于多维度空间耦合的六足机器人步态规划
2017-12-15艾青林阮惠祥陈教料应申舜
艾青林 阮惠祥 陈教料 应申舜
浙江工业大学特种装备制造与先进加工技术教育部/浙江省重点实验室,杭州,310014
基于多维度空间耦合的六足机器人步态规划
艾青林 阮惠祥 陈教料 应申舜
浙江工业大学特种装备制造与先进加工技术教育部/浙江省重点实验室,杭州,310014
针对现有机身工作空间求解算法不适用于非平坦地形下六足机器人步态规划的问题,提出一种基于多维度空间耦合算法的机身工作空间求解方法,并将其应用于机器人在非平坦地面运动的步态规划中。将机身工作空间分为三个子空间,解析三个子空间边界方程,耦合得出机身工作空间,在此基础上,解析机身位姿与站立腿关节转角之间的映射关系,完成机身运动规划。仿真和样机实验结果对比表明:与采用传统机身运动规划算法的步态相比,所提方法能够减小摆动腿足端偏移量和机身姿态角变化幅度,并且能够保证机器人具有更高的步态稳定裕度,使机器人获得更好的步态稳定性。
六足机器人;子空间耦合;机身工作空间;机身运动;步态规划
0 引言
在多足机器人步态规划中机身运动规划对摆动腿足端理想落足点可达性、机器人稳定性以及步态效率等都有着重要的作用[1-2]。在多足机器人中,六足机器人具有冗余的肢体结构,能够实现丰富的步态,因此被广泛应用于户外场景下作业[3-4],而在户外一些非平坦地面,六足机器人机身运动规划具有更重要的作用,但目前关于四足机器人机身运动规划的研究较多[5-8],而对非平坦地面上六足机器人机身运动规划的研究比较少。
机身运动规划主要包括两部分内容,分别是机身工作空间求解和机身位姿调整。其中,机身工作空间求解是机身运动规划和机器人在非平坦地面上稳定运动的关键。目前,对多足机器人工作空间求解主要采用数值解析法[9-10],这种方法在求解过程中涉及到较多的逆运动学解析,导致算法的计算效率不高,只适用于一些特定环境下的机器人步态规划[11],实际意义相对有限。文献[12]采用蒙特卡罗方法对机器人工作空间进行求解,避免了机器人逆解问题,但这种方法不适用于六足机器人在非平坦地面的步态规划。
在理想落足点和局部环境已知的情况下,要保证六足机器人步态稳定,其机身工作空间必须满足三个条件:①满足机身的运动约束;②保证摆动腿足端能够落到理想的落足点;③确保机身具有足够的稳定裕度。如果采用传统的解析法求解机器人机身工作空间,求得的机身工作空间只能够满足第一个条件,要实现机器人的稳定步态就必须通过不断地调整机身位姿来满足后面两个条件,这是一个复杂且不具确定性的过程,会影响机器人的步态效率,并且,基于这种方法设计的步态对地形的适应能力有限。
本文对机身运动的三个子空间进行求解,这三个子空间分别是机身运动约束空间K、理想落足点可达约束空间R以及机身稳定性约束空间B。当机身重心位于这三个子空间的交集空间中时,机器人运动满足上面所述的三个条件,在此基础上,对机身在理想工作空间中的位姿进行调整,完成六足机器人的机身运动规划,在理想落足点已知的情况下,对六足机器人在非平坦地面的步态进行仿真分析和样机实验。
1 机器人运动学建模
本文所研究的六足机器人三维模型如图1所示,图中,尺寸单位为mm。根据D-H法建立图2所示的六足机器人运动学模型,坐标系{W}、{C}分别为世界坐标系和机身坐标系。Li(i=1,2,3,4,5,6)分别为机器人的六条腿,因为每条腿的结构一样,故以L2为例,建立腿部坐标系。坐标系{0}为根关节坐标系,H2为L2根关节离地高度,LF2为足端与根关节在水平地面上投影点之间的距离。坐标系{1}、{2}、{3}、{4}分别为基节、股节、胫节和足端坐标系,θ21、θ22和θ23分别为L2各关节转角,l1、l2、l3分别为基节、股节和胫节的长度。
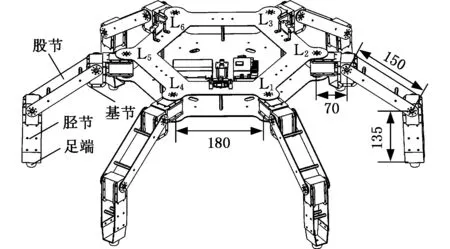
图1 六足机器人三维模型Fig.1 The three-dimensional model of the hexapod robot

图2 六足机器人运动学模型Fig.2 The kinematic model of the hexapod robot
根据图2所示的运动学模型,结合D-H法可以求出足端2,A2在其根关节B2处的位置坐标为
B2pA2=[B2xA2B2yA2B2zA2]T=
(1)
式中,cθ=cosθ,sθ=sinθ,c(θ22+θ23)=cosθ22+cosθ23,s(θ22+θ23)=sinθ22+sinθ23,其余同理。
根据图2中的几何关系,求得H2和LF2的表达式为
(2)
根据文献[13]所述的腿部逆运动学求解方法可以求得L2各关节转角分别为
(3)
其中, Atan2(B2yA2,B2xA2)是一个计算arctan(B2yA2/B2xA2)的双参数反正切函数,它通过B2yA2和B2xA2二者的符号来确定角的象限。t1、t2表达式如下:

a21、a22、a23和b21、b22、b23表达式如下:

2 基于多维度空间耦合的机身工作空间解析
本文提出的三个机身子空间分别满足机身运动约束、摆动腿理想落足点可达约束以及机身稳定性约束,通过耦合三个子空间可求得机身工作空间。
2.1 机身运动约束空间K解析
图3所示为单腿对机身运动的约束,图中,点G为机身实时重心,机器人沿x轴正方向前进。用向量WpG=(WxG,WyG,WzG)T表示机身重心在世界坐标系中的位置坐标,结合图3进行各个坐标间的向量运算,可得

(4)

(5)

(6)
式中,α、β、γ分别为机身坐标系相对于世界坐标系的偏航角、俯仰角和横滚角。
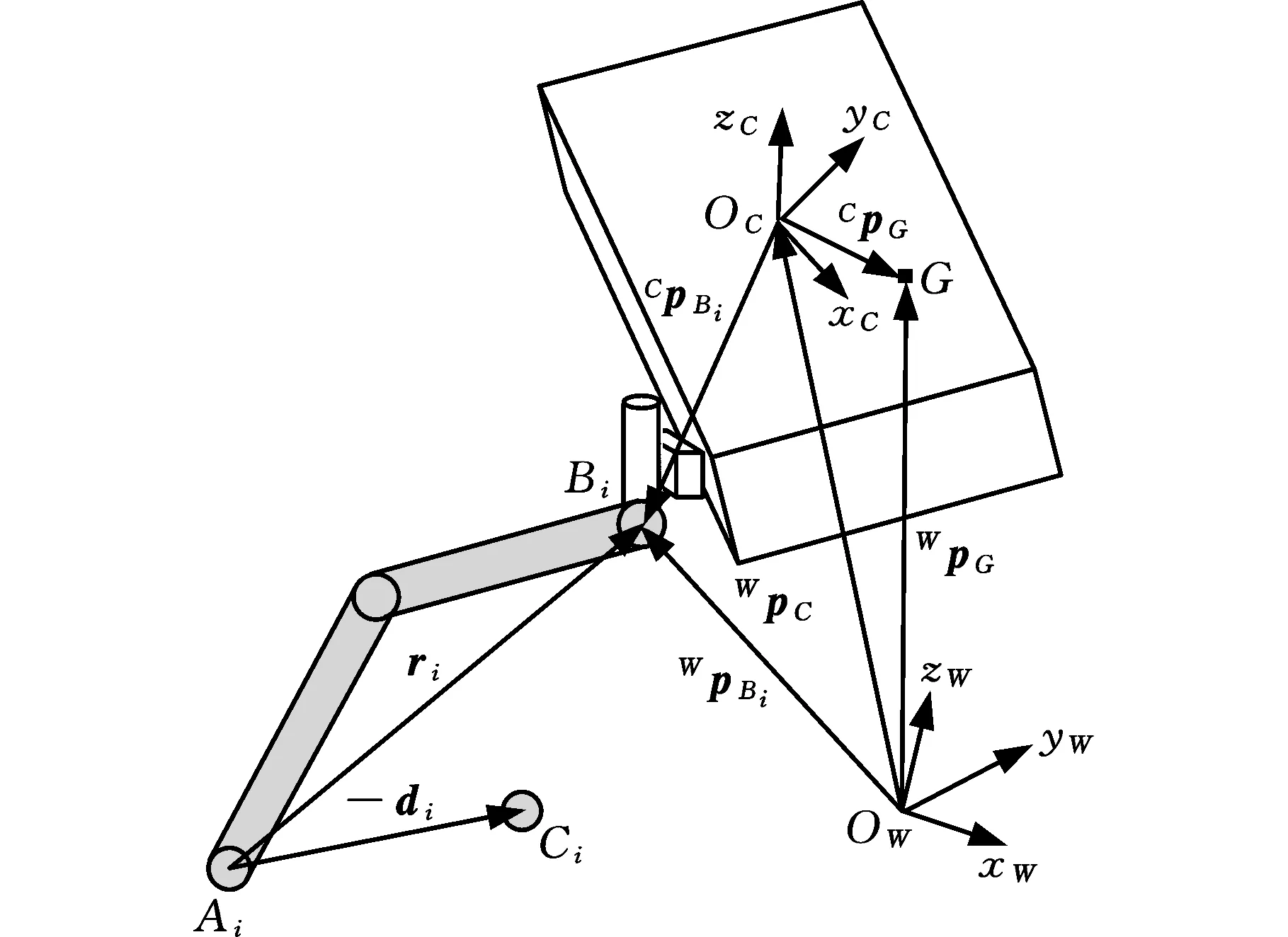
图3 单腿对机身运动的约束Fig.3 The constrain of a leg on the body movement
联立式(4)和式(5),可得
(7)
式(7)两边同时减去向量WpAi得
(8)
式中,向量WpAi为足端在世界坐标系中的位置坐标。
图3中,根关节到足端的距离‖ri‖可以表示为

(9)
其中,向量ri为单腿约束子空间的约束半径,式(9)两边同时取平方,得

(10)
从式(10)可以看出,单腿约束子空间为两个同心球体,其中,向量Wci为球心在世界坐标系下的位置坐标,可以表示为
(11)
根据式(11),图3中的向量di可以表示为
(12)
根据式(10),耦合机器人腿部约束空间Ki,可得机身运动约束空间K:
K=K1∩K2∩K3∩K4∩K5∩K6
(13)
图4为机身运动约束空间K在世界坐标系yz坐标面上的投影图。
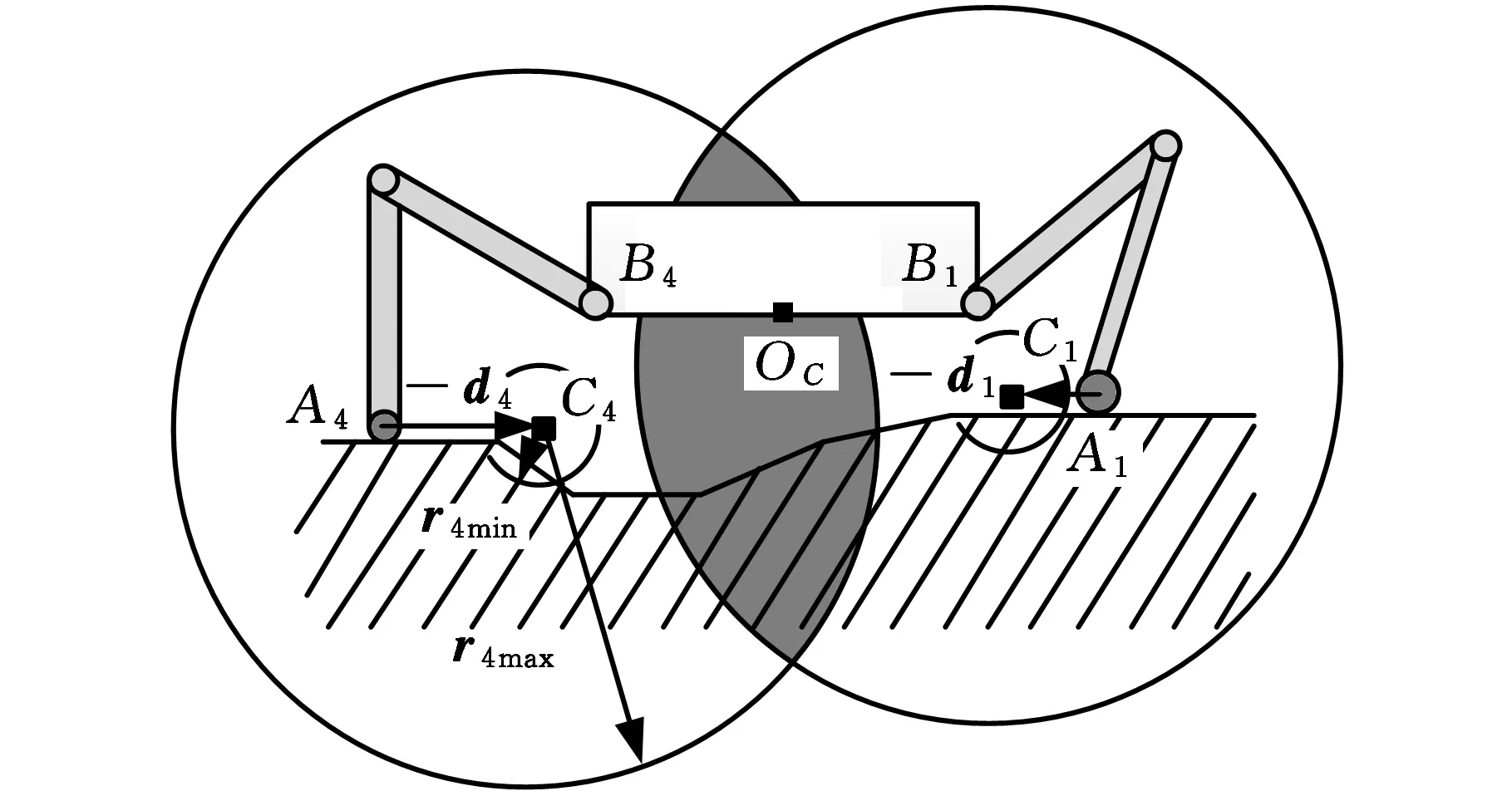
图4 机身运动约束空间K在世界坐标系yz坐标面的投影Fig.4 The projection of the kinematic workspace of the body in the yz coordinate plane of the world coordinate system
图4中,二个图重叠部分为机身运动约束空间K,向量rimin为最小虚拟约束半径,向量rimax为最大虚拟约束半径,其表达式为

(14)
式中,LFi为足端与根关节在水平面上的垂直投影点之间的距离(图2);Hi为根关节与其在水平面上的垂直投影点之间的距离。
结合式(2),代入关节转角约束可以求得虚拟约束半径的最大值和最小值。
2.2 机身理想落足点可达约束空间R解析
在非平坦地面下,六足机器人摆动腿理想落足点有限,因此,需要通过规划机身位姿使得足端能够准确地到达理想落足点。在2.1节求得的机身运动约束空间K中,许多机身位姿可能无法保证摆动腿足端能够准确地到达理想落足点,因此,需要求解机身的另外一个子空间,即摆动腿理想落足点可达约束空间R。当机器人机身重心位于空间R和空间K的交集空间中时,机器人运动既能保证机身运动约束,也能保证摆动腿足端能够准确地落到理想落足点。
根据机器人采用的步态方式,假设机器人有一条或者多条虚拟腿,并进一步假设这些虚拟腿已经落在理想落足点上。根据2.1节确定空间K的方法确定满足虚拟腿约束空间K,即本节要求的理想落足点可达约束空间R,其表达式为
R=F1∩F2∩F3
(15)
式中,Fi(i=1,2,3)为虚拟摆动腿的运动约束空间。
式(15)求解了机器人在下个周期采用三角步态时的理想落足点可达约束空间R,此时虚拟腿的数量为3,如果机身在下个周期采用单步态或者四边形步态,那么虚拟腿数量为1或者2。
2.3 机身稳定性约束空间B解析
当机身重心位于空间K和空间R的交集空间中时,六足机器人的运动既能满足机身运动约束,又能保证机器人摆动腿足端能够达到理想的落足点。然而,在非平坦地面,还必须确保机器人步态的稳定性。本文将机器人步态视为静态步态,采用静态稳定性判据来判断机器人在非平坦地面下步态的稳定性。以六足机器人三角步态为例,其支撑多边形如图5所示。

图5 三角步态支撑多边形Fig.5 The support polygon of the tripod gait
支撑三角形各边解析式如下:

(16)

(17)

(18)
a1=y2-y1b1=x1-x2c1=x2y1-x1y2
a2=y3-y1b2=x1-x3c2=x3y1-x1y3
a3=y3-y2b3=x2-x3c3=x3y2-x2y3
式中,(x1,y1),(x2,y2),(x3,y3)分别代表足端A1、足端A3和足端A5在世界坐标系xy坐标面上的投影点坐标。


(19)
采用下式判断机身重心在世界坐标系xy坐标面上的投影点是否落在支撑多边形内:
SΔ1=SΔ2+SΔ3+SΔ4
(20)

根据式(20)可以求出子空间K和子空间R的交集空间中,哪些重心位置能够确保机器人步态过程中保持稳定。
至此,机身三个工作子空间已经全部得出,对这三个子空间进行耦合,得机身工作空间:
W=K∩R∩B
(21)
以三角步态为例,机身工作空间W在世界坐标系xy平面下的投影如图6所示。图中,实线同心圆相交部分为机身运动约束空间K,虚线同心圆相交部分为摆动腿理想落足点可达约束空间R,实线三角形为稳定性约束空间B,三个子空间的交集空间为机身工作空间W。当机器人机身重心处于空间W中时,机器人运动既满足机身运动约束,又能保证摆动腿足端可以落到理想点,还能确保步态的静态稳定性。
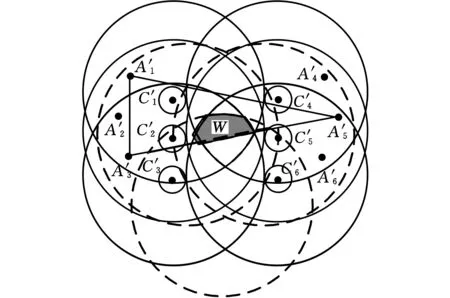
图6 机身工作空间W在世界坐标系xy坐标面的投影Fig.6 The projection of the body workspace in the xy coordinate plane of the world coordinate system
3 机身位姿调整
机身位姿调整包括机身位置调整和机身姿态调整,其中,机身位置调整指的是当机身处于理想姿态时,解析机身重心位置与站立腿关节转角之间的映射关系。用向量WpGO(WxGO,WyGO,WzGO)T和向量WpGD(WxGD,WyGD,WzGD)T分别表示机身重心在机身摆动前后相对于世界坐标系的位置坐标,则机身重心运动向量为WpGM(WxGD-WxGO,WyGD-WyGO,WzGD-WzGO)T。
根据相对运动原理,假设机身静止,机身运动的过程可以看成是站立腿往相反方向摆动的过程,则站立腿足端摆动向量为
WpAiM=-WpGM
(22)
图7a所示为机身位置调整前后站立腿足端摆动向量在世界坐标系、机身坐标系以及根关节坐标系下的位姿关系。图7中,机身坐标系和根关节坐标系保持不变,AiO和AiD分别为机身位置调整前后的足端点,向量WpAiO和向量WpAiD分别为起始足端点和目标足端点在世界坐标系下的坐标,向量BipAiD为目标足端点在根关节坐标系下的位置,向量CpAiD为目标足端点在机身坐标系下的位置,图中其余参量如前所述。

(a)机身位置调整前后各坐标系间的位姿关系
(b)机身姿态调整前后各坐标系间的位姿关系图7 机身位姿调整前后各坐标系间的位姿关系Fig.7 The pose relationship between each coordinate system before and after the adjustment of body posture
结合图7a可得目标足端坐标系相对于世界坐标系的位置坐标为
WpAiD=WpAiO-WpGM
(23)
根据各坐标系间的姿态转换关系,可得目标足端坐标系相对于根关节坐标系的位置坐标为
(24)

根据式(24),结合式(3),可以得出机身重心位置与站立腿关节角度间的映射关系。
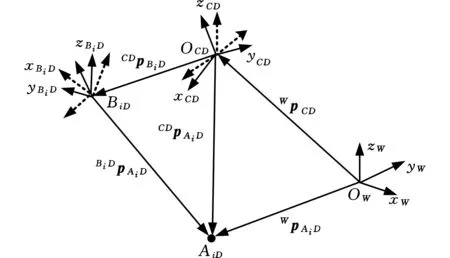
当机身完成位置调整后,需对机身姿态进行调整,即当机身重心处于理想位置时,解析机身姿态与关节转角之间的映射关系。图7b为机身姿态调整前后站立腿足端在世界坐标系、目标机身坐标系以及目标根关节坐标系下的表示。图中,位于机身坐标系和根关节坐标系处的虚线坐标轴为姿态调整前的机身坐标系和根关节坐标系,{OCD}和{OBiD}为机身姿态调整后的机身坐标系和根关节坐标系,向量BiDpAiD为机身位置调整后的目标足端点在目标根关节坐标系下的坐标,向量CDpAiD为机身位置调整后的目标足端点在目标机身坐标系下的位置,向量WpCD为目标机身坐标系在世界坐标系中的位置坐标,向量CDpBiD为目标根关节坐标系相对于机身坐标系的位置坐标,向量WpAiD为机身位置调整后的目标足端点在世界坐标系下的坐标,图中其余参量如前所述。
结合图7b,根据各坐标系间的姿态转换关系,可得足端坐标系相对于目标根关节坐标系的位置坐标为
(25)
根据式(25),并结合式(3),可以得出机身姿态与站立腿关节角度间的映射关系。
4 仿真分析与样机实验
首先,通过MATLAB对不同姿态下的机身初始工作空间进行仿真,然后,通过MATLAB和ADAMS联合仿真,对六足机器人在非平坦地形下的步态进行仿真,最后,通过样机实验验证仿真结果的有效性。
4.1 机身初始工作空间仿真
本文研究的六足机器人机身和腿部各连杆尺寸如图1所示。机身、基节、股节、胫节以及足端的质量分别为:mb=1000 g,m1=150 g,m2=200 g,m3=200 g,m4=50 g。受机械结构限制,腿部各关节转角约束分别为:-π/3≤θ1≤π/3,-π/2≤θ2≤π/2,-π/2≤θ3≤π/2。根据式(14),求得单腿虚拟约束半径为:163 mm≤‖ri‖≤355 mm。
假设机器人处于初始状态时,机身坐标系相对于世界坐标系的姿态角为α=0°、β=0°、γ=0°;各腿足端在世界坐标系中的位置分别为:A1(500,527,80)mm,A2(281,618,80)mm,A3(43,527,80)mm,A4(500,-51,80)mm,A5(280,-141,80)mm,A6(57,-51,80)mm;根关节在机身坐标系下的位置为:B1(156,90,0)mm,B2(0,180,0)mm,B3(-156,90,0)mm,B4(156,-90,0)mm,B5(0,-180,0)mm,B6(-156,-90,0)mm。令机器人各腿沿机身均匀分布,则机身重心与机身几何中心重合,机身重心在机身坐标系下的位置坐标为CpG(0,0,0)mm;机器人下个步态采用三角步态,腿1、3、5为摆动相,理想落足点在世界坐标系中的位置分别为:R1(600,527,180)mm,R3(143,527,80)mm,R5(380,-141,80)mm;根据式(10)和式(11),通过MATLAB对机身初始工作空间进行仿真计算,结果如图8a所示,改变机身初始姿态,此时机身坐标系相对于世界坐标系的姿态为α=10°,β=10°,γ=10°,其余参数保持不变,机身工作空间如图8b所示;再次改变机身初始姿态,此时机身坐标系相对于世界坐标系的姿态为α=15°、β=15°、γ=15°,其余参数保持不变,机身工作空间如图8c所示。

(a)姿态角为0°

(b)姿态角为10°
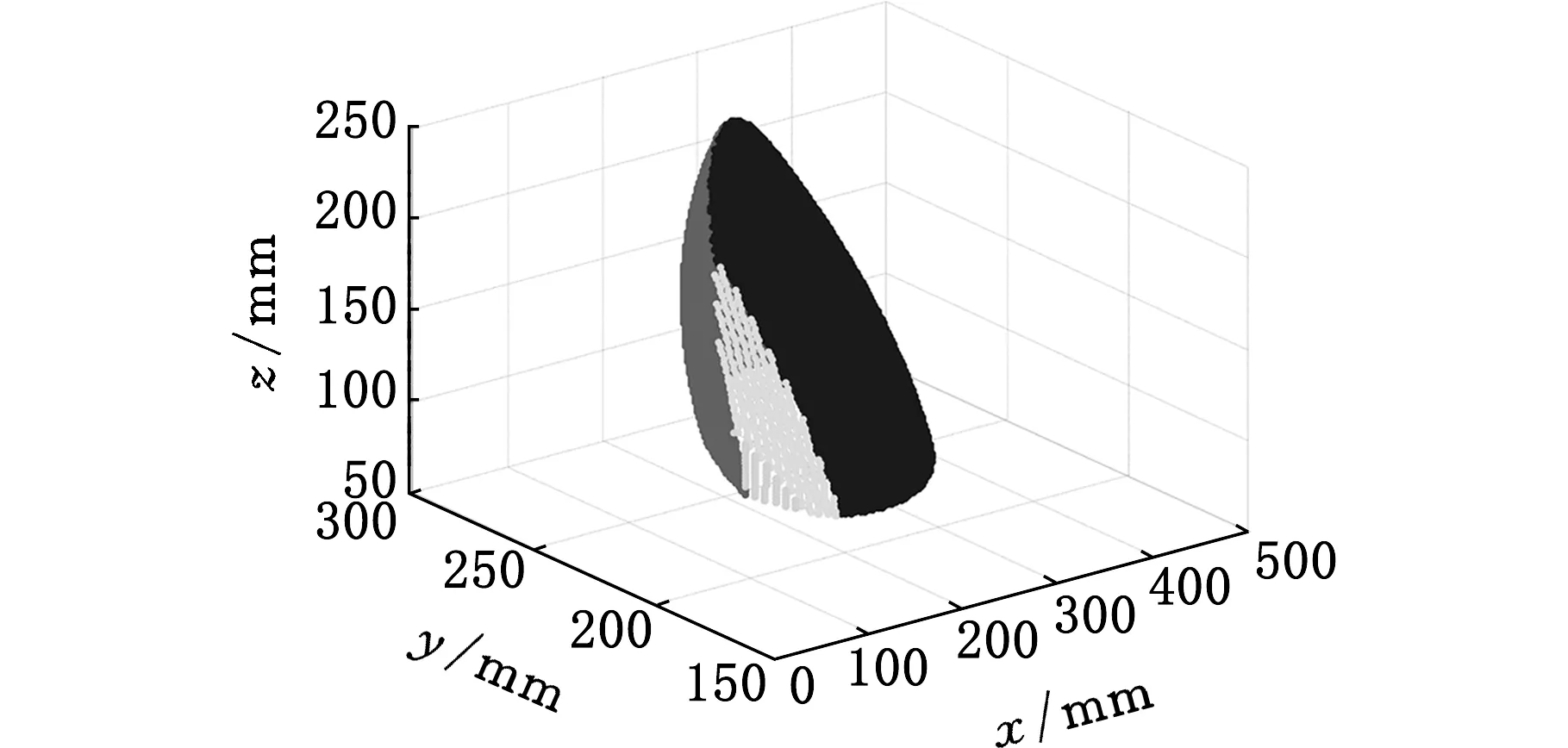
(c)姿态角为15°图8 不同姿态下的机身初始工作空间Fig.8 The initial body workspace with different orientation
当机身处于不同姿态时,机身虚拟约束半径保持不变,均为163 mm≤‖ri‖≤355 mm;而机身单腿约束子空间球心位置不同,比如当机身初始姿态为α=0°,β=0°,γ=0°时,各个单腿约束子空间的球心位置分别为C1(337,39,80)mm,C2(344,437,80)mm,C3(281,438,80)mm,C4(199,437,80)mm,C5(213,39,80)mm,C6(280,39,80)mm;而当机身初始姿态为α=10°、β=10°、γ=10°时,各个单腿约束子空间的球心位置分别为C1(330,10,122)mm,C2(362,413,92)mm,C3(306,442,49)mm,C4(206,466,38)mm,C5(195,63,68)mm,C6(255,35,111)mm;虚拟单腿约束子空间球心位置也不同,当机身初始姿态为α=0°,β=0°,γ=0°时,虚拟单腿约束子空间的球心位置分别为C7(444,437,180)mm,C8(299,437,80)mm,C9(380,39,80)mm;当机身初始姿态为α=10°、β=10°、γ=10°时,各个虚拟单腿约束子空间的球心位置分别为C7(461,412,191)mm,C8(307,465,37)mm,C9(354,34,110)mm。即机身初始姿态的变化会引起机身运动约束空间K和理想落足点可达约束空间R变化,从而改变机身工作空间W,如图8所示,并且,机身工作空间W随着机身姿态角的增大而减小。
4.2 非平坦地面步态仿真
在理想落足点已知的前提下,通过MATLAB对机器人逆解进行求解,将得到的关节输出位置角导入到ADAMS中,完成六足机器人在非平坦地面下的步态联合仿真。
在机身运动规划中,采用两种不同的方法对机身工作空间进行求解:第一种方法是本文提出的多维度工作空间耦合求解方法,第二种方法是文献[15]所述方法,即不考虑足端理想落足点可达约束和机身稳定性约束。将这两种机身运动规划方法分别运用于非平坦地面下的步态仿真。在ADAMS中的仿真环境如图9所示。图9中,参数L=500 mm,d=30 mm,H1=80 mm,H2=180 mm,W1=900 mm,W2=450 mm。机器人机身初始姿态角为α=0°,β=0°,γ=0°,初始位置足端在世界坐标系下的坐标分别为A1(500,527,80)mm,A2(281,618,80)mm,A3(43,527,80)mm,A4(500,-51,80)mm,A5(280,-141,80)mm,A6(57,-51,80)mm,机身初始工作空间如图8a所示。
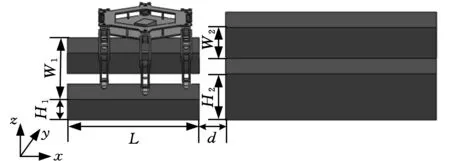
图9 机器人步态仿真环境Fig.9 The gait simulation circumstance of the hexapod robot
单步态周期时序图见图10,图10中,机器人采用三角步态,白框代表支撑相,黑框代表摆动相,灰框代表调整相,摆动相、支撑相和调整相时间都设为0.2 s,步幅设为100 mm,足端与地面之间的静摩擦因数和动摩擦因数分别为0.3和0.2,仿真时间设为4 s,共5个步态周期。

图10 单个周期步态时序图Fig.10 The sequence chart of a period gait
两次仿真过程中,机器人各足端与理想落足点之间的偏移量不同,以足端4为例,图11a和图11b为足端4在世界坐标系下沿x轴和y轴的轨迹,仿真1采用本文提出的方法规划机身运动,仿真2采用文献[15]方法规划机身运动。
(a)足端4沿世界坐标系x轴轨迹

(b)足端4沿世界坐标系y轴轨迹图11 足端4沿世界坐标系x轴和y轴的轨迹Fig.11 The path of the footend along the x and y axis of the world coordinate system
本文所提出的机身工作空间求解方法考虑了足端理想落足点可达的问题,因此在步态过程中,足端横向和纵向偏移量相对较小,足端4在步态仿真过程中,5次作为摆动相,时间分别是0.6~0.8 s、1.4~1.6 s、2.2~2.4 s、3.0~3.2 s、3.8~4.0 s,对应的5个理想落足点分别为(600,-51,180)mm,(700,-51,180)mm,(800,-51,180)mm,(900,-51,180)mm, (1000,-51,180)mm。仿真1足端4最终落足点分别为(605,-48,180)mm,(708,-45,180)mm,(810,-45,180)mm,(910,-43,180)mm,(1011,-41,180)mm。仿真2足端4最终落足点分别为(605,-45,180)mm,(714,-38,180)mm,(822,-29,180)mm, (930,-19,180)mm,(1039,-8,180)mm。对比两次仿真,仿真1中,足端4单步态周期最大纵向和横向偏移量分别为11 mm和10 mm,仿真2中,足端4单步态周期最大纵向和横向偏移量分别为39 mm和43 mm,即仿真1足端x轴和y轴偏移量分别是仿真2的28%和25%,并且,仿真2中足端1的横向偏移量呈现大幅度的累加趋势,如果机器人继续直行或者W2的值减小,那么机器人将偏离理想轨迹,然后从地面上失稳跌倒。
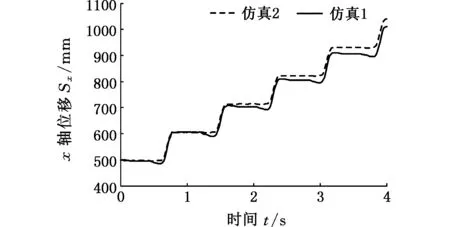
机身重心沿世界坐标系x轴和y轴轨迹如图12所示。机器人各足端的偏移会最终导致机器人步态轨迹的偏离,图12中,仿真1机身重心最终纵向和横向偏移量分别为9 mm和14 mm;仿真2机身最终纵向和横向偏移量分别为23 mm和34 mm,即仿真1机身重心沿x轴和y轴偏移量分别是仿真2机身重心沿x轴和y轴偏移量的39%和40%。
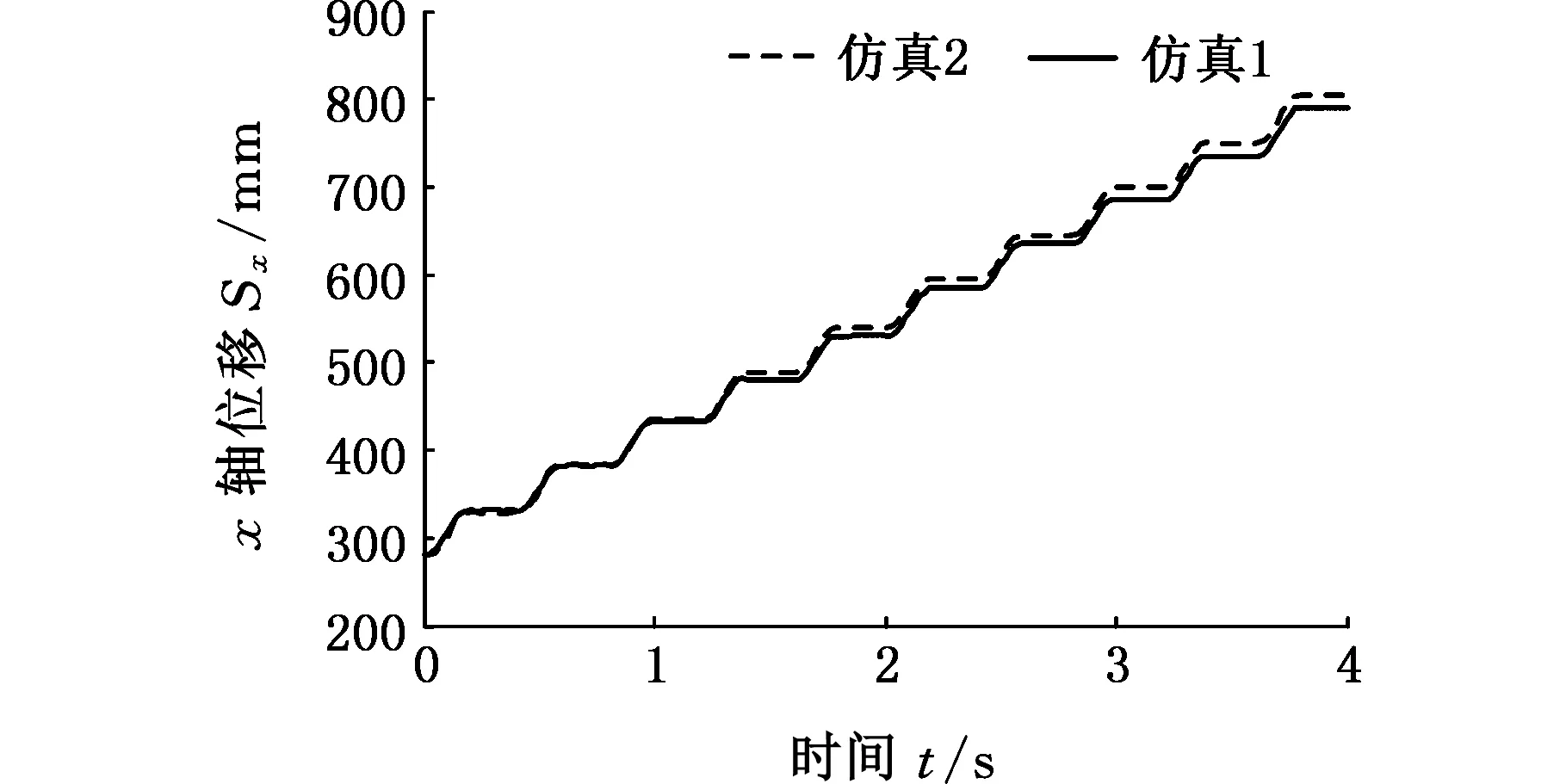
(a)机身重心沿世界坐标系x轴轨迹
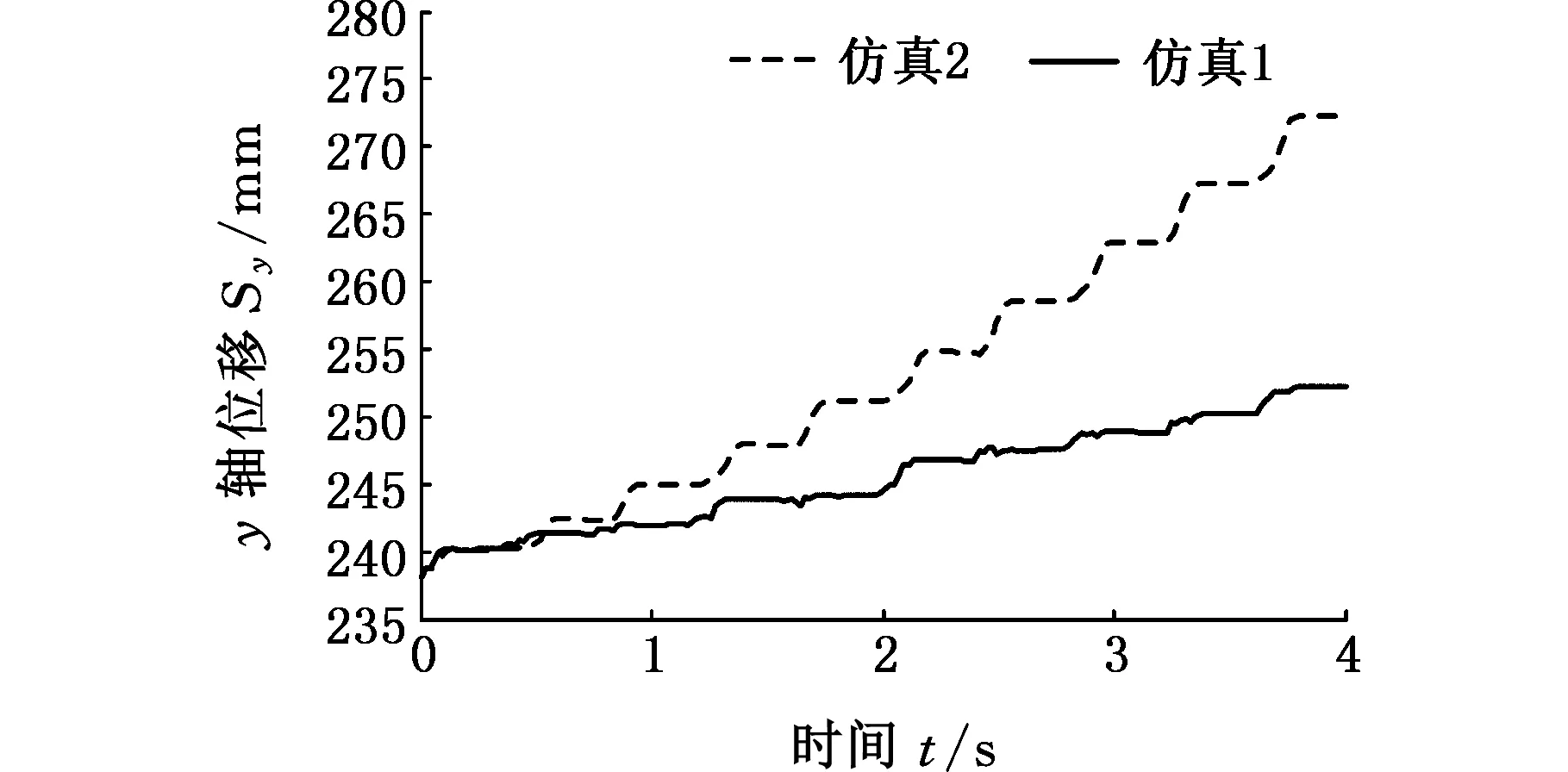
(b)机身重心沿世界坐标系y轴轨迹图12 机身重心沿世界坐标系x轴和y轴的轨迹Fig.12 The path of the center of gravity of the body along the x and y axis of the world coordinate system
稳定裕度是判断机器人静态步态稳定性的一个重要指标,图13为机器人在步态过程中稳定裕度Sm的变化曲线。

图13 机器人稳定裕度SmFig.13 The stable margin of the hexapod robot
机器人的步态,在运动状态发生变化时最容易发生失稳,如0.2~0.4 s,机器人由调整相变为摆动相,站立腿数量减少,Sm的值也发生了明显的变化,对比两次仿真,仿真1中,Sm的值由163 mm变为64 mm,减小了99 mm,仿真2中,Sm的值由166 mm变为30 mm,减小了136 mm,由于仿真1在机身工作空间求解过程中考虑了机身稳定性约束,所以Sm的减小量仅为仿真2的72%,并且随着地形崎岖度的增大这个比例将会进一步减小,如果不作出调整,仿真2的机器人在步态过程中很有可能会出现倾翻的情况。
机器人机身的俯仰角和横滚角反映了机身运动的平稳性,图14为机器人步态过程中,机身坐标系相对于世界坐标系的俯仰角β和横滚角γ的变化曲线。

(a)机身相对世界坐标系俯仰角β

(b)机身相对世界坐标系横滚角γ图14 机身相对世界坐标系姿态角Fig.14 The angle of orientation of the body in the world coordinate system
图14中,仿真1俯仰角和横滚角的变化范围分别为-1.9°~2.9°和-1°~1.5°,仿真2俯仰角和横滚角的变化范围分别为-8.2°~3.8°和0.1°~4.1°,仿真1在机器人步态过程加入了机身调整相,并且在机身位姿调整过程中考虑了机身实时重心位置变化的问题,提高了机身姿态调整的准确性,保证了姿态调整后机身俯仰角和横滚角的变化幅度更小,调整过后的俯仰角和横滚角的变化范围仅为仿真2俯仰角和横滚角变化范围的40%和60%。
4.3 样机实验
通过所设计的样机实验平台,对本文提出的步态规划方法进行了进一步的验证。
4.3.1样机搭建
本文所研究的六足机器人样机如图15所示,采用CM-700作为下位机主控板,用来驱动关节舵机和外部传感器。CM-700理论上可以同时带动255个舵机,各个舵机通过编程实现ID设置,板载5路485通信接口和4路TTL通信接口用来驱动关节舵机,6路外部设备通信接口用来驱动外部传感器,可驱动的传感器类型包括红外传感器、测距传感器和接触传感器等;机器人每条腿各有3个关节,共18个关节,全部采用RX-24F舵机驱动,RX-24F舵机最大力矩可达2.4 N·m,和主控板之间通过485协议进行通信,舵机内置控制芯片,能够实时反馈舵机的位置、电压、力矩和角速度等信息;板载传感器包括测距传感器DMS-80以及陀螺仪传感器,后续还将加上视觉传感器和足端触觉传感器,其中,DMS-80传感器的有效测距范围为10~80 cm,在有效测距范围内,其测距误差可以控制在1%以内;陀螺仪传感器能够测得机身沿世界坐标系x轴和y轴的转角位置和转角速度。机身和腿部采用硬质铝合金构造,整机质量在3 kg左右。

图15 六足机器人实验平台Fig.15 The experimental platform of the hexapod robot
4.3.2实验分析
在仿真的基础上,增大地面不平坦度,将d设置为100 mm,W1设置为800 mm,将两段路面设置为一个坡度角为6°的斜面,其余参数如图9所示。机器人采用三角步态,步幅设置为150 mm,步态过程中,调整相、摆动相和支撑相的时间依旧都设为0.2 s,进行三个周期的步态,步态过程如图16所示。0.4~0.6 s为机身调整相,此时,机身完成位姿调整,保证机器人下个运动状态稳定裕度不出现大幅度下降,摆动相能够达到理想的落足点,并且机身姿态角不出现大范围波动。从图16中可以看出,整个步态过程中,机器人足端位置没有发生明显的偏移,以足端4为例,在步态起始时,足端4距离路面左边界距离为80mm,在整个步态过程中,足端4落足点与路面左边界距离一直保持在80mm左右,在步态结束时,这个距离为85mm;同时,机器人在步态过程中,机身姿态也没有发生明显的变化,机器人从起始位置到终止位置,机身一直保持直行状态,实现了机器人在非平坦地面下稳定的步态过程,从而证明了所提步态规划方法的有效性。

(a)t=0 (b)t=0.4 s

(c)t=0.6 s (d)t=0.8 s

(e)t=1.2 s (f)t=1.6 s

(g)t=2.0 s (h)t=2.4 s图16 六足机器人样机步态实验Fig.16 The prototype gait experiment of the hexapod robot
5 结语
为了提高六足机器人在非平坦地面下步态的稳定性,本文提出了一种基于多维度工作空间耦合的方法求解机身工作空间,将其应用于非平坦地面下机器人的步态规划中,并通过了仿真和样机实验验证了所提方法的可行性。和采用传统机身运动规划方法的步态相比,本文所提的步态规划方法具有如下创新点。
(1)在机身工作空间求解过程中,避免了复杂的机器人逆运动学求解,考虑了摆动腿理想落足点可达约束,保证了机器人在步态过程中,足端和机身重心横向和纵向的偏移量仅为采用传统步态规划方法的28%、25%和39%、40%,提高了机器人步态的位移控制精度。
(2)在机身工作空间求解过程中,考虑到了机身稳定性约束,保证了机器人在步态过程中,当运动状态发生变化时,稳定裕度Sm的减小量仅为采用传统步态规划方法的72%,提高了机器人步态的稳定性。
(3)验证了当机身姿态角分别为0°、10°和15°时,机身工作空间相继减小,由此,在步态过程中加入了调整相,对机身姿态进行了调整,并且,在机身运动规划时,考虑到了实时重心位置变化,提高了机身运动规划的准确性,调整过后的机身俯仰角β和横滚角γ变化幅度分别减小了近60%和40%,提高了机身的运动平稳性。
在本文中,对机器人机身运动规划时,没有对机身初始位姿进行优化,在后续的研究工作中,将对机器人机身相对于世界坐标系的位姿进行优化,进一步提高步态的稳定性,减小步态过程中足端相对理想落足点的偏移量。
[1] HAUSER K K, BRETL T, LATOMBE J C, et al. Motion Planning for Legged Robots on Varied Terrain [J]. International Journal of Robotics Research, 2008, 27(11): 1325-1349.
[2] ESTREMERA J, COBANO J A, SANTOS P G D. Continuous Free-crab Gaits for Hexapod Robots on a Natural Terrain with Forbidden Zones: an Application to Humanitarian Demining [J]. Robotics and Autonomous Systems, 2010, 58(5): 700-711.
[3] ZHANG He, LIU Yubin, ZHAO Jie, et al. Development of a Bionic Hexapod Robot for Walking on Unstructured Terrain [J]. Journal of Bionic Engineering, 2014, 11(2): 176-187.
[4] 赵龙海. 六足步行机器人自然地形下全方位运动规划策略研究 [D]. 哈尔滨: 哈尔滨工业大学, 2013.
ZHAO Longhai. Research on Omnidirectional Motion Planning of the Hexapod Walking Robot on Natural Terrain [D]. Harbin: Harbin Institute of Technology, 2013.
[5] KOLTER J Z, NG A Y. The Stanford Little Dog: a Learning and Rapid Replanning Approach to Quadruped Locomotion [J]. International Journal of Robotics Research, 2011, 30(2): 150-174.
[6] NEUHAUS P D, PRATT J E, JOHNSON M J. Comprehensive Summary of the Institute for Human and Machine Cognition’s Experience with Little Dog [J]. International Journal of Robotics Research, 2011, 30(2): 216-235.
[7] ESTREMERA J, SANTOS P G D.Generating Continuous Free Crab Gaits for Quadruped Robots on Irregular Terrain [J]. IEEE Transactions on Robotics, 2006, 21(6): 1067-1076.
[8] KALAKRISHNAN M, BUCHLI J, MISTRY M, et al. Learning, Planning, and Control for Quadruped Locomotion over Challenging Terrain [J]. International Journal of Robotics Research, 2011, 30(2): 236-258.
[9] 赵杰, 王卫忠, 蔡鹤皋. 可重构机器人工作空间的自动计算方法 [J]. 天津大学学报, 2006, 39 (9): 1082-1087.
ZHAO Jie, WANG Weizhong, CAI Hegao. Algorithms for Automatically Determining Workspace of Reconfigurable Robots [J]. Journal of Tianjin University, 2006, 39(9): 1082-1087.
[10] LOC V G, KOO I M, TRAN D T, et al. Improving Traversability of Quadruped Walking Robots Using Body Movement in 3D Rough Terrains [J]. Robotics and Autonomous Systems, 2011, 59(12): 1036-1048.
[11] VERNAZA P, LIKHACHEV M, BHATTACHARYA S, et al. Search-based Planning for a Legged Robot over Rough Terrain [C]//IEEE International Conference on Robotics and Automation. Kobe, Japan, 2009: 12-17.
[12] 曹毅, 王树新, 李群智. 基于随机概率的机器人工作空间及其解析表达[J]. 组合机床与自动化加工技术, 2005 (2):1-4.
CAO Yi, WANG Shuxin, LI Qunzhi. Generation of Manipulator Workspace Boundary Geometry Using the Probabilistic Method and Its Analytical Description [J]. Modular Machine Tool&Automatic Manufacturing Technique, 2005 (2):1-4.
[13] 李满宏, 张建华, 张明路. 新型仿生六足机器人自由步态中足端轨迹规划[J]. 中国机械工程, 2014, 25(6):821-825.
LI Manhong, ZHANG Jianhua, ZHANG Minglu. Foot Trajectory Planning for a Hexapod Biomimetic Robot Using Free Gait [J]. China Mechanical Engineering, 2014, 25(6):821-825.
[14] SANDOVAL-CASTRO X Y, CASTILLO-CASTANEDA E, LOZANO-GUZMAN A A. Hexapod Walking Robot CG Analytical Evaluation [J]. Springer International Publishing, 2014, 8917: 309-319.
[15] 李满宏, 张明路, 张建华, 等. 基于运动相对性的六足机器人机体运动规划 [J]. 中国机械工程, 2015, 26(3):313-318.
LI Manhong, ZHANG Minglu , ZHANG Jianhua, et al.Body Motion Planning for a Hexapod Robot Based on Relative Motion [J]. China Mechanical Engineering, 2015, 26(3):313-318.
GaitPlanningofaHexapodRobotBasedonMulti-dimensionalSpaceCoupled
AI Qinglin RUAN Huixiang CHEN Jiaoliao YING Shenshun
Key Laboratory of E&M,Ministry of Education & Zhejiang Province,Zhejiang University ofTechnology,Hangzhou,310014
The existing algorithms to compute the body workspace were not suitable for the gait planning of a hexapod robot on the uneven terrains. To overcome this problem, a calculation method of the body workspace of a hexapod robot was introduced based on multi-dimensional space coupled herein. Then, the method was applied to the gait planning on the unseven terrains. Three subspaces of the body and the boundary equation of these subspace were presented, and then, these subspaces were coupled to get the body workspace. Based on the body workspace, in order to obtain the relationship among the postures of the body and the joint angles of standing legs, the algorithm of the body postures was solved. The simulation and experimental results show that compared with the existing planning methods the gait planning introduced herein may guarantee the footend reaching the desired foot point precisely and reduce the rangeability of the attitude angles of the body, which may ensure the hexapod robot walking on the uneven terrains stably.
hexapod robot; subspace coupled; body workspace; body movement; gait planning
TP242
10.3969/j.issn.1004-132X.2017.23.009
2016-12-16
NSFC-浙江两化融合联合基金资助项目(U1509212);国家自然科学基金资助项目(51275470);浙江省高等学校中青年学科带头人学术攀登项目(pd2013019)
(编辑王艳丽)
艾青林,男,1976年生。浙江工业大学机械工程学院教授、博士研究生导师。主要研究方向为多足机器人控制技术、钢带并联机器人技术、建筑钢结构探伤机器人技术等。发表论文50余篇。授权专利30多项。E-mail:aqlaql@163.com。阮惠祥,男,1991年生。浙江工业大学机械工程学院硕士研究生。陈教料,男,1979年生。浙江工业大学机械工程学院副教授。应申舜,男,1978年生。浙江工业大学机械工程学院讲师。
