飞翼布局无人机着舰飞行动力学分析
2017-12-13陈志刚阎永举
韩 维,陈志刚,张 勇,阎永举
(1.海军航空大学,山东烟台264001;2.91467部队,山东胶州266311)
飞翼布局无人机着舰飞行动力学分析
韩 维1,陈志刚1,张 勇1,阎永举2
(1.海军航空大学,山东烟台264001;2.91467部队,山东胶州266311)
飞翼布局无人机具有独特的气动特性,研究飞翼布局无人机着舰飞行动力学特性对设计无人机着舰控制律具有重要意义。针对飞翼布局无人机着舰下滑飞行过程,建立六自由度飞行动力学模型,并通过对着舰飞行轨迹稳定性的分析,根据飞行品质对飞行轨迹稳定性的约束,计算达到一级飞行品质要求的着舰飞行速度。通过配平计算和小扰动线性化处理,得到无人机着舰下滑运动线性模型,并分析无人机纵向和横航向的固有模态特性。结果表明,飞翼无人机着舰下滑过程中,纵向的长、短周期模态及横航向的滚转和螺旋模态收敛但收敛慢,荷兰滚模态发散。
飞翼布局;着舰;飞行品质;模态特性
飞翼布局无人机具有升阻比大、气动效率高、隐身性能好、装载空间大等优点[1],是现代作战无人机发展的热点。美国海军X-47B无人机成功实现航母弹射起飞和拦阻着舰,标志着舰载无人攻击机达到了一个关键里程碑。与常规布局飞机相比,飞翼布局无人机采用机翼和机身融为一体、无尾翼的非常规布局,具有多轴不稳定特性[2]。
文献[2-5]对无尾飞翼布局无人机的气动特性和操稳特性进行了研究。文献[6]对无尾布局飞机的横航向气动特性和操控特性进行了分析。文献[7]分析了小型无尾飞翼布局无人机的气动特性。舰载机在着舰下滑时通常速度较低,飞行在“速度反区”,仅依靠操纵升降舵无法使舰载机姿态达到预期操纵效果。文献[8]以国外现役某小型无人机为研究对象,建立了无人机动力学和运动学模型,分析了无人机横航向模态特性,并基于此设计了横航向着舰控制律和引导律。文献[9]针对舰载飞翼布局无人机建立小扰动线性方程,并分析无人机在进舰下滑状态下的纵向固有模态特性。目前,对飞翼布局无人机在低速着舰下滑过程的飞行动力学分析还相对较少。
本文在建立飞翼布局无人机着舰下滑动力学模型的基础上,开展飞翼布局无人机的着舰飞行轨迹稳定性的研究,根据飞行品质对着舰飞行轨迹稳定性的要求,对着舰飞行速度的范围进行分析。通过对无人机着舰下滑动力学模型进行配平计算及线性化处理,对飞翼布局无人机纵向和横航向的固有模态特性进行分析。
1 飞行动力学模型
假设不考虑地球曲率和自转以及飞机的弹性变形和质量变化,根据飞行力学中欧美体制规范,在机体坐标系下建立飞机飞行动力学方程[10-11]:
运动学方程组为:
式(1)~(4)中:[u,v,w]T为飞机速度分量;[φ,θ,ψ]T为机体姿态角;[p,q,r]T为角速度;[xg,yg,h]T为飞机在地面坐标系下的坐标;[Fx,Fy,Fz]T为气动合力分量;[Mx,My,Mz]T为气动合力矩分量;m为飞机质量;g为重力加速度;I和ω*分别为飞机的惯性矩阵和旋转矩阵,其表达式分别为:
2 着舰飞行轨迹稳定性分析
飞机在进舰着舰阶段保持定常飞行,以一定的下滑角进行匀速直线运动。飞机处于定常直线飞行状态时,其切向力平衡方程为:
式(7)中:T为飞机推力;D为飞机气动阻力;α为迎角;γ为航迹倾角。
假设飞机仅通过偏转升降舵来改变其飞行状态,即发动机推力不变,对式(7)进行小扰动线性化处理,得到
则有
式(10)中:ρ为空气密度;CD为气动阻力系数;S为机翼面积。
又因为
式中:CD0为零升阻力系数;A为诱导阻力因子;CL为气动升力系数;CLmin为最小阻力系数对应的升力系数。
所以,
式(13)中,L为飞机气动升力,L=mgcosγ。
因此,
结合式(9)~(14)得:
根据dγ/dV的正负,可以将飞行轨迹分为稳定区和不稳定区[12]。在稳定区,dγ/dV<0,当航迹倾斜角γ减小时,速度V增加,通过控制升降舵即可保持γ和V。在不稳定区,dγ/dV>0,速度V随航迹倾斜角γ的减小而减小,仅通过控制升降舵已无法调节航迹倾斜角,要保持速度V必须控制发动机推力。
3 仿真计算与结果
3.1 着舰下滑配平
飞翼布局无人机的主要参数如表1所示[13]。
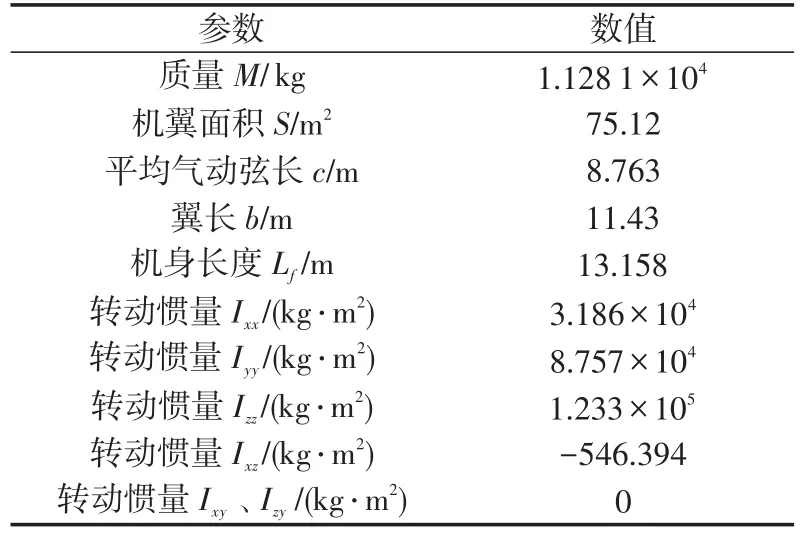
表1 无人机主要参数表Tab.1 UAV parameters
采用改进鱼群算法[14]对无人机定常直线下滑飞行的平衡状态进行求解。该算法采用自适应变异算子对常规鱼群算法进行改进,具有高效的搜索效率,且能够避免求解陷入局部最优。
根据无人机着舰下滑运动约束条件:偏航角ψ=0,滚转角φ=0,侧滑角β=0,下滑角γ=-3.5°,角速度p=q=r=0,速度范围40~100 m/s内无人机下滑飞行进行配平计算,得到推力系数曲线如图1所示。
由图1可知,随着飞行速度的增加,配平推力先减小后增大,临界速度为70.13 m/s。由式(7)可知,配平推力与飞行阻力正相关。当飞行速度小于临界速度时,速度降低会使飞行阻力增加,因而飞行速度会降低,使飞行阻力更增加,形成速度不稳定。为了保持稳定飞行,只能增加推力以平衡阻力,此时飞机表现出“速度反区”特性。当飞行速度大于临界速度时,速度增加会使飞行阻力增加,因而飞行速度会降低,使飞行阻力降低,形成速度稳定。
3.2 着舰飞行轨迹稳定性分析
达到一级飞行品质的速度[15]是确定舰载机进场下滑最小速度的主要因素,且在处与-2.572 m/s处的 dγ/dV之差≤0.027(°)/(km⋅h-1)。
根据式(15),在40~75m/s的速度范围内对飞行轨迹稳定性进行计算,见图2。
由图2可知,随着飞行速度的增加,dγ/dV的值不断减小,在临界速度70.13 m/s时等于0,与配平推力曲线得到的临界速度相一致。
根据以上分析,无人机进场下滑速度VPA可取的范围是58.351 4~70.13 m/s。
3.3 无人机模态特性分析
根据非线性六自由度无人机着舰下滑动力学模型,对无人机进场下滑速度为60 m/s时进行配平计算,配平结果见表2。
对模型进行线性化[16-18]处理,得到无人机的纵向和横航向状态方程分别如式(16)、(17)所示,其纵向和横航向自然特性如表3所示。

表2 配平计算结果Tab.2 Trim results

表3 无人机纵向和横航向模态特性Tab.3 Longitudinal and lateral-directional modal properties
由表3可知:无人机纵向趋于收敛,但长周期和短周期模态频率较低,收敛速度慢;横航向的滚转和螺旋模态趋于收敛,但频率较低,收敛慢,而荷兰滚模态发散。
4 结论
通过建立飞翼布局无人机着舰下滑动力学模型,分析了无人机在着舰下滑过程中的参数变化,得到以下结果。
1)飞翼布局无人机在低速进场下滑过程中,飞行轨迹处于不稳定区,体现出“速度反区”特性,要保持飞行速度,必须同时控制升降舵和油门;
2)飞翼布局无人机的进场下滑速度取值在一定范围内可以保证无人机达到一级飞行品质,满足着舰下滑飞行要求;
3)飞翼布局无人机在着舰下滑过程中,纵向的长、短周期模态及横航向的滚转和螺旋模态收敛但收敛慢,荷兰滚模态发散。通过模态特性分析,为着舰飞行控制律和引导律的设计提供参考。
[1]王彦雄,祝小平,周洲,等.穿越微下冲气流的飞翼布局无人机控制方法[J].航空学报,2015,36(5):1673-1683.WANG YANXIONG,ZHU XIAOPING,ZHOU ZHOU,et al.A control method of flying wing for penetration of microburst[J].Acta Aeronautica et Astronautica Sinica,2015,36(5):1673-1683.(in Chinese)
[2]程雪梅.飞翼布局无人机的稳定与操纵特性分析研究[J].飞行力学,2011,29(1):9-12.CHENG XUEMEI.Study on stability and controllability of flying wing UAV[J].Flight Dynamics,2011,29(1):9-12.(in Chinese)
[3]蔡晟.飞翼无人机的操纵性和稳定性分析及自动着陆控制律设计[D].南京:南京航空航天大学,2010.CAI SHENG.Flying wing UAV’s stability and control character and design of auto-landing control law[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2010.(in Chinese)
[4]冯立好,王晋军,巴玉龙.操纵面作动对无尾布局无人机纵向气动特性的影响[J].实验流体力学,2012,26(2):29-33.FENG LIHAO,WANG JINJUN,BA YULONG.Influence of control surfaces deflection on longitudinal aerodynamic characteristics of a tailless unmanned aerial vehicle[J].Journal of Experiments in Fluid Mechanics,2012,26(2):29-33.(in Chinese)
[5]张子军,黎军,李天,等.开裂式方向舵对某无尾飞翼布局飞机气动特性影响的实验研究[J].实验流体力学,2010,24(3):63-66.ZHANG ZIJUN,LI JUN,LI TIAN,et al.Experimental investigation of split-rudder deflection on aerodynamic performance of tailless flying-wing aircraft[J].Journal of Experiments in Fluid Mechanics,2010,24(3):63-66.(in Chinese)
[6]冯立好,王晋军,于东升.多操纵面无尾布局飞机横航向控制[J].北京航空航天大学学报,2010,36(9):1038-1042.FENG LIHAO,WANG JINJUN,YU DONGSHENG.Lateral-directional control of tailless aircraft with multiple control surfaces[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(9):1038-1042.(in Chinese)
[7]屈晓波,李中健,章卫国.模型预测控制算法在飞翼无人机中的应用研究[J].测控技术,2013,32(3):57-61.QU XIAOBO,LI ZHONGJIAN,ZHANG WEIGUO.Application of model predictive control in the flight control system of flying-wing UAV[J].Measurement and Control Technology,2013,32(3):57-61.(in Chinese)
[8]郑峰婴,龚华军,王新华.小型舰载无人机侧向自主着舰引导技术[J].南京航空航天大学学报,2013,45(1):82-87.ZHENG FENGYING,GONG HUAJUN,WANG XINHUA.Small carrier UAV lateral autonomous landing system[J].Journal of Nanjing University of Aeronautics and Astronautics,2013,45(1):82-87.(in Chinese)
[9]张旭,韩维,王允良,等.飞翼无人机进舰下滑纵向固有模态特性研究[J].海军航空工程学院学报,2016,31(4):461-466.ZHANG XU,HAN WEI,WANG YUNLIANG,et al.Intrinsic mode characteristic research on the flying-wing UAV during carrier landing[J].Journal of Naval Aeronautical and Astronautical University,2016,31(4),461-466.(in Chinese)
[10]夏桂华,董然,许江涛,等.考虑扰流的舰载机终端进场线性模型[J].航空学报,2016,37(3):970-983.XIA GUIHUA,DONG RAN,XU JIANGTAO,et al.Linearized carrier-based aircraft model in final approach phase with air turbulence considered[J].Acta Aeronautica et Astronautica Sinica,2016,37(3):970-983.(in Chinese)
[11]夏青元,徐锦法.三轴式无人旋翼飞行器及自适应飞行控制系统设计[J].航空学报,2013,34(3):495-508.XIA QINGYUAN,XU JINFA.A design of triaxial unmanned rotor aircraft and its adaptive flight control system[J].Acta Aeronautica et Astronautica Sinica,2013,34(3):495-508.(in Chinese)
[12]杨一栋,余俊雅.舰载飞机着舰引导与控制[M].北京:国防工业出版社,2007:111-113.YANG YIDONG,YU JUNYA.Induct and control of carrier-based aircraft landing[M].Beijing:National Defense Industry Press,2007:111-113.(in Chinese)
[13]鲁可.无人战斗机着舰飞行控制研究[D].南京:南京航空航天大学,2013.LU KE.The study on flight control of unmanned combat air vehicle automatic landing on carrier[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2013.(in Chinese)
[14]陶杨,韩维,宋伟健.改进鱼群算法在飞机下滑配平中的应用[J].飞行力学,2014,32(4):360-367.TAO YANG,HAN WEI,SONG WEIJIAN.Trimming for aircraft’s glide based on an improved artificial fish-group algorithm[J].Flight Dynamics,2014,32(4):360-367.(in Chinese)
[15]中国人民解放军总装备部.GJB 3719-99舰载飞机规范(飞行品质)[S].北京:中国人民解放军总装备部,1999:16-19.THE PLA GENERAL ARMAMENT DEPARTMENT.GJB 3719-99 Ship-based airplane specification(Flying qualities)[S].Beijng:The PLA General Armament Department,1999:16-19.(in Chinese)
[16]夏桂华,董然,孟雪,等.舰载机着舰的动力学建模[J].哈尔滨工程大学学报,2014,35(4):445-456.XIA GUIHUA,DONG RAN,MENG XUE,et al.Research on the Dynamic Modeling for the Landing of a Carrier-based Aircraft[J].Journal of Harbin Engineering University,2014,35(4):445-456.
[17]LI JUNNAN,DUAN HAIBIN.Simplified brain storm optimization approach to control parameter optimization in F/A-18 automatic carrier landing system[J].Aerospace Science and Technology,2015(42):187-195.
[18]董然.ACLS纵向内回路控制系统研究[D].哈尔滨:哈尔滨工程大学,2013.DONG RAN.Research on the longitudinal inner loop configuration in ACLS[D].Harbin:Harbin Engineering University,2013.(in Chinese)
Analysis of the Flight Dynamic During Flying Wing UAV Carrier Landing
HAN Wei1,CHEN Zhigang1,ZHANG Yong1,YAN Yongju2
(1.Naval Aviation University,Yantai Shandong 264001,China;2.The 91467thUnit of PLA,Jiaozhou Shandong 266311,China)
Flying wing UAV has distinct aerodynamic characteristic.It’s of great significance to research the flight dynamic character for the design of control law during the carrier-landing of flying wing UAV.A six-degree-of-freedom flight dynamic model of flying wing UAV carrier landing was presented.Based on the analysis of the flight stability of the UAV gliding,the range of approaching velocity achieving flight quality of first-class level was calculated,according to the requirement of the flight quality to the flight stability.Through the trim calculation and small perturbation linearization,the linear model of UAV gliding motion was obtained.The longitudinal and lateral-directional modal properties were analyzed.Results showed that during the flying wing UAV gliding,the longitudinal long-periodic and short-periodic mode and the lateral-directional roll and spiral mode became convergent slowly,but the dutch roll mode was divergent.
flying-wing configuration;carrier landing;flight quality;modal properties
V279;V212.1
A
1673-1522(2017)05-0421-05
10.7682/j.issn.1673-1522.2017.05.001
2017-02-15;
2017-03-22
国家自然科学基金资助项目(51375490)
韩 维(1970-),男,教授,博士,博导。
