远海船舶噪声分布初步研究
2017-12-01薛睿超杨燕明黄二辉文洪涛
薛睿超,杨燕明,黄二辉,文洪涛
远海船舶噪声分布初步研究
薛睿超,杨燕明,黄二辉,文洪涛
(国家海洋局第三海洋研究所,福建厦门 361005)
舰船数量、吨位以及航行距离的急剧上升导致了海洋环境噪声级大幅度升高,对海洋环境的影响也日趋加重。但是当前的海洋环境噪声研究所使用的历史航船数据库的信息却非常匮乏且无法及时更新,不能反映出船舶噪声真实的变化情况。此外,对于远离岸边的海域,岸基船舶自动识别系统(Automatic Identification System,AIS)与雷达无法监测到,卫星AIS技术的不成熟导致了船舶数据时效性和完整性的严重不足。因此,尚无可用的远海大范围的船舶数据。为了解决远海船舶数据缺乏的问题,提出了一种基于多源AIS数据的数据融合方法,根据某海域在某个时间段内收到的所有AIS信息,处理后进行融合,融合结果可以得到任一时刻该海域的船舶分布情况,进而可计算出该海域的区域船舶噪声级。
海洋环境噪声;船舶噪声级;卫星船舶自动识别系统;远海
0 引言
近年来,世界范围内的大规模海上贸易日趋繁荣,大量的商船活动导致了海洋环境噪声级的大幅升高。国内外对海洋环境噪声的重视与日俱增[1],但是对海洋环境噪声的认知却停留在十几年甚至几十年前的测量数据上,海上声学调查也只集中于军事敏感区域,并且数据保密。人们对海洋环境噪声实时变化的了解非常有限。有研究表明,1960~2000年,海洋环境噪声呈上升趋势,特别是低频段的海洋环境噪声以每10年3 dB的速度上升[2],这一趋势直到近年来才逐渐减缓[3]。Ross[4-5]在1974年和1993年对上个世纪50~70年代的20年间,由于航船引起的低频海洋环境噪声的变化做了详细的分析和总结。据Ross描述,到上个世纪70年代中期,海洋环境噪声级的统计平均值已经明显上升,不考虑气候变化的影响,仅航船噪声占重要地位的频段(15~250 Hz)和地区,平均噪声级比Kunsen和Wenz时代增加了约3~5 dB,因为仅在1950年以后的25 年内,海上航船数量就增加了一倍多,并且船只的最大吨位和主机的推动力都大幅度增加。Piggott和Crouch[6-7]等人在Wenz测量的相同地点进行了海洋环境噪声测量,结果发现,10~80 Hz范围内海洋环境噪声级增加了10 dB左右;高于80 Hz时频段差异逐渐减小,在80~200 Hz之间仅增长了1~3 dB;高于200 Hz时海洋环境噪声级变化不大。文献[8]给出了1850~2000年间航船噪声与自然噪声的变化趋势,如图1所示。可以看出,总的航船噪声在上个世纪增长了接近40 dB。航船辐射噪声是海洋环境噪声低频部分的主要来源,也是持续性噪声的主要来源。在合适的传播条件下,即使很远处的航船辐射噪声也能对声接收点处的海洋环境噪声强度产生影响。因此,掌握海面航船分布数据及其辐射噪声源级对分析和掌握海洋环境噪声级的变化趋势十分重要。国外的航船数据已有多年积累,目前国内在此领域才刚刚起步,并缺乏有效的大规模测量手段[9]。
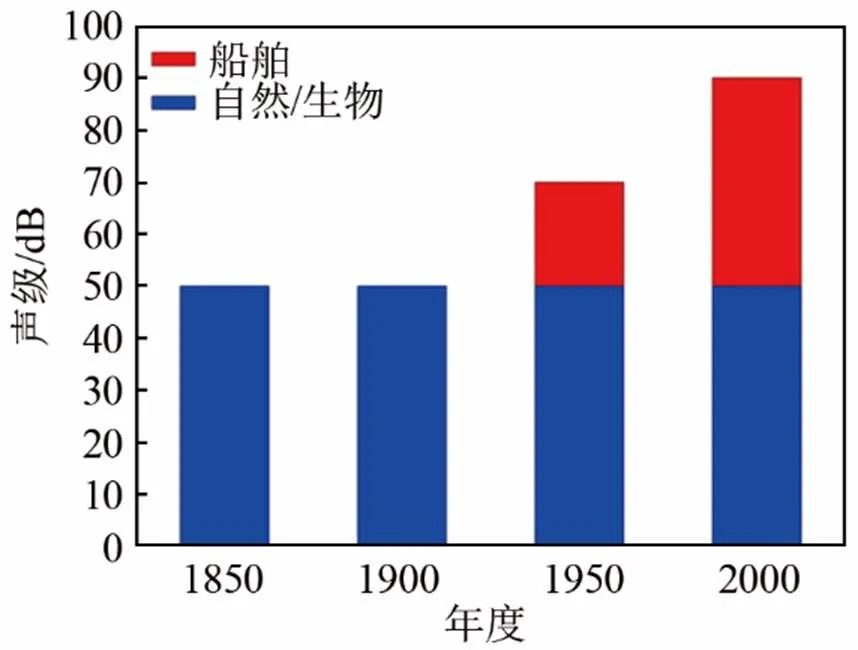
图1 航船噪声和自然/生物噪声发展趋势
船舶自动识别系统(Automatic Identification System,AIS),诞生于上世纪90年代初期,最初设计用于船舶避碰。AIS信息不仅包含了船舶时空上的信息,也给出了船舶当前的航行状态。卫星AIS的出现,对远海船舶的航行具有革命性的意义[10-14],但是它的设计初衷并没有考虑到从太空检测信号的可能性,这导致了它在热点海域的检测存在盲点[15]。本文基于现有的AIS数据,提出了一种数据融合方法,可以在最大限度上还原远海船舶的分布情况,根据AIS信息中的船速等信息可以计算出船舶的声源级,进而计算出大范围海域的航船噪声分布。
1 数据来源以及研究方法
1.1 数据来源
本文现有数据的主要来源为近年(2012~2015年)我国南海海域部分时段的航船数据,由国外商用卫星AIS数据和部分岸基AIS数据组成。岸基AIS的覆盖范围仅为40 n mile(1 n mile=1852 m),因此无法满足远海用户的使用需求。监测大范围海域的航船分布也首选卫星AIS数据。中国南海是重要的海上运输通道,航船密度高,目前也是海上争端多发海域,事关我国海洋权益,战略地位突出。如能有效掌握南海的航船分布,进而分析和掌握南海的航船辐射背景噪声具有重要意义。因严重的时隙冲突,卫星AIS在此类船舶高密度海区的船舶探测概率非常低[10-13],经过数据对比,发现很多区域的检测概率低于20%,国外的商用卫星AIS数据仍有大量遗漏和延时。
1.2 研究方法
为了解决商用卫星AIS数据的遗漏和延时问题,本文考虑对其进行融合,具体方法和步骤如下:
(1) 获取一段连续时间的多源AIS数据,包括不同来源的星载AIS数据和岸基AIS数据(如有条件也可加入船载AIS数据);
(2) 对所得到的数据进行统一的标准化处理和质量控制(因为数据来源不同,可能含有多种格式的数据且数据质量不一,需要统一数据格式以及剔除无效的数据);
(3) 根据所得AIS数据中的时间、方位、船速、航向等信息,推算出每一时刻每一艘船舶的方位以及航行状态;
(4) 通过自编的计算程序进行批量计算处理,绘制得到船舶分布图和船舶轨迹图。
方法的实现流程如图2所示。
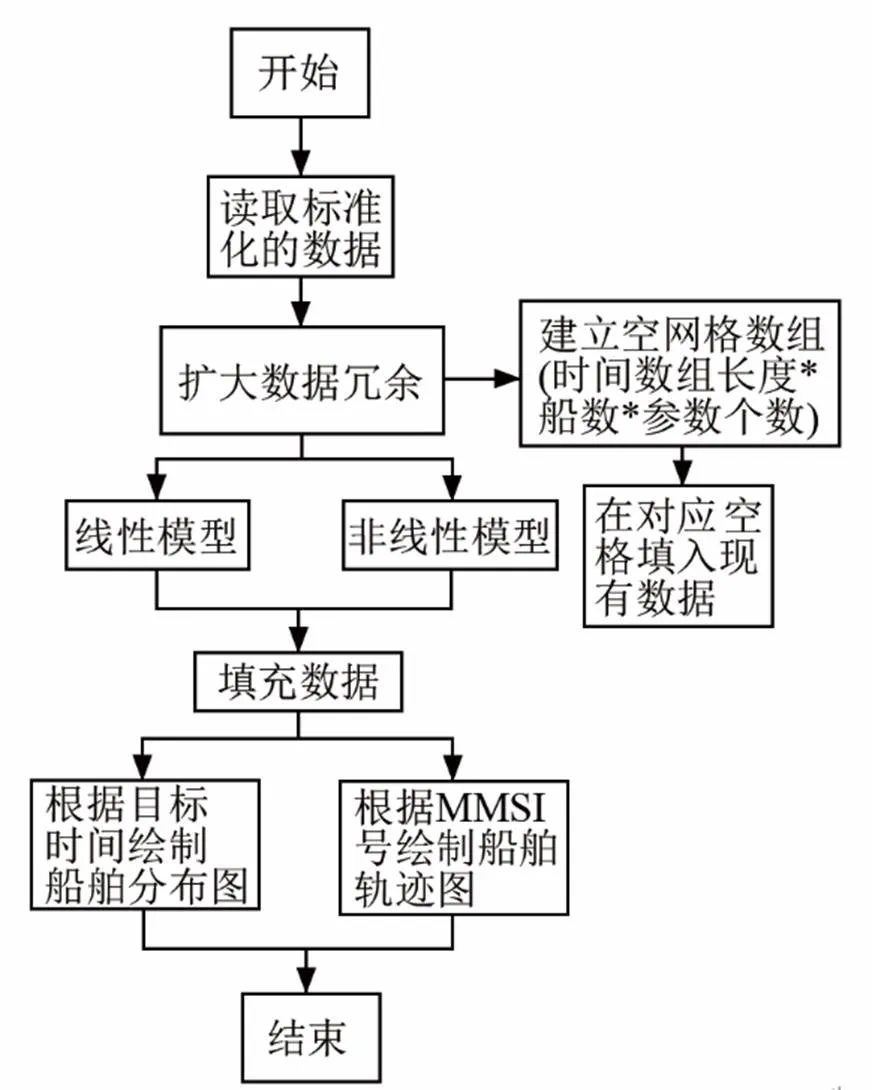
图2 研究方法实现流程图
1.2.1 数据处理方法
标准化后的数据为本文所需要的参数,包括水上移动通信业务标识码(Maritime Mobile Service Identify,MMSI)、时间、船速、航向、经度、纬度等船舶相关参数;数据处理采用增加数据冗余的方法,即根据时间序列构造三维数据表,保证了数据处理的效率和准确度。本文中的时间分辨率设定为1 h,航行状态包括船速、航向。另外,加入了时间间隔判断条件,提高了结果的准确性;计算程序由Matlab语言编写。
1.2.2 计算模型
本文提供了两种船位计算模型,可以根据不同的需要进行选择。
模型一为线性模型。根据AIS数据中同一船舶不同时刻的经纬度信息,以固定的时间精度进行坐标位置的线性插值,结果如图3所示。

(a) 原始数据 (b) 计算结果
图3(a)中的两个点表示同一船舶在不同时刻的船位,经过线性插值后得到图3(b)的结果。可以用式(1)表示:
模型一的计算方法简单,速度快,但所得到的拟合结果精度较低,且当相邻数据间隔时间太大会造成较大误差。该模型适用于大范围船舶分布的粗略统计以及其他对船位精度要求不高的应用。
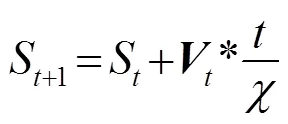
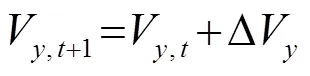
模型二为非线性(迭代)模型。根据AIS数据中同一船舶在不同时刻的经纬度、船速、航向等信息,进行综合分析,采用迭代算法推算出每一时刻该船舶的船位以及相关航行状态。示意图见图4。
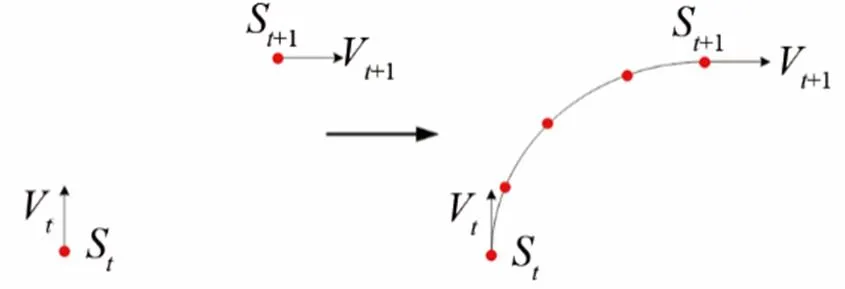
(a) 原始数据 (b) 计算结果


2 船舶分布数据的计算分析
本文的研究方法,利用AIS信息推算出不同时刻目标海域的船舶分布情况。首先,本文综合了多源AIS数据,进行统一的标准化处理;其次,根据获得的AIS信息,以时间为分组依据把所有参数分别进行分组;再根据方位、船速、航向信息进行拟合,构造连续时间的数组;最后,绘制船舶分布图和轨迹图。所获取的原始数据的数量和质量越高,得到的结果越精确。下面对本文的研究方法进行说明。具体实施步骤如下:
步骤1:根据获得的岸基、卫星数据进行标准化和质量控制,并提取所需参数,形成新的标准数据集。
步骤2:处理数据。本文使用的多源星载AIS数据来源于星载AIS服务的供应商美国ORBCOMM公司和加拿大exactEarth公司的卫星数据,岸基AIS数据来源于exactEarth公司,区域为中国南海部分海域的数据,数据时间包括2012年8月份和2015年5月份,共两个月的数据(2012年数据不包含岸基数据)。
步骤2-1:建立时间×船数×参数个数的三维数组,其中行为船舶的MMSI号,列为所获数据的时间宽度(划分到精度),页为参数的个数,本文中选取的页数为6,分别为时间、经度、纬度、船速、航向、卫星数据标记;
步骤2-2:把标准化后的数据按时间、MMSI号填入对应空格;
步骤2-3:代入线性模型或者非线性迭代模型计算,所得结果填充表格数据,具体方法如下:
(1) 线性模型:提取所有数据中的船舶的方位信息(经度、纬度),按照时间先后的顺序进行排序,判断相邻数据点的时间间隔是否大于3天(可设置),若大于则在之间填充为“缺失”,符合小于条件的数据根据时间精度进行线性插值,得到中间所有时刻的船舶方位信息。
(2) 非线性迭代模型:提取所有数据中的方位、航行状态信息(包括经度、纬度、船速、航向),按照时间先后的顺序进行排序,判断相邻数据点的时间间隔是否大于5天,若大于则在之间填充为“缺失”,符合小于条件的数据进行迭代计算:根据前后两个数据的船速和航向数据,计算速度矢量在轴和轴方向的分量以及变化量,推算出中间时刻的方位、船速、航向信息。上述模型中加入时间间隔判断条件是为了过滤部分中途停泊或者驶出区域范围的船舶,以及恶劣天气下(如台风)锚泊的船舶。
步骤2-4:去除异常点和超过最大允许时间间隔的数据;
步骤2-5:存储数据以便后续处理。
步骤3:根据处理后的数据绘制相关示意图。图5(a)是由原始数据绘制得到的中国南海区域2012年8月份某时的船舶分布示意图,不包括岸基数据,船舶数为264。图5(b)为经本方法数据融合后得到的同一时刻同一区域的船舶分布示意图,船舶数为1 629。图5(c)是由原始数据绘制得到的南海区域2015年5月份某时的船舶分布示意图,包括岸基数据,船舶数为2 092。图5(d)为经本方法数据融合后得到的同一时刻同一区域的船舶分布示意图,船舶数为7 887。通过对比可以看到,数据融合优化前的船舶分布和数量严重失真,应用价值不大,优化后的船舶分布和数量极大改善,接近真实情况。也可以看出,是否加入岸基数据,对结果中近岸船舶的分布影响很大。

(a) 原始数据(2012年8月)
(b) 融合后数据(2012年8月)
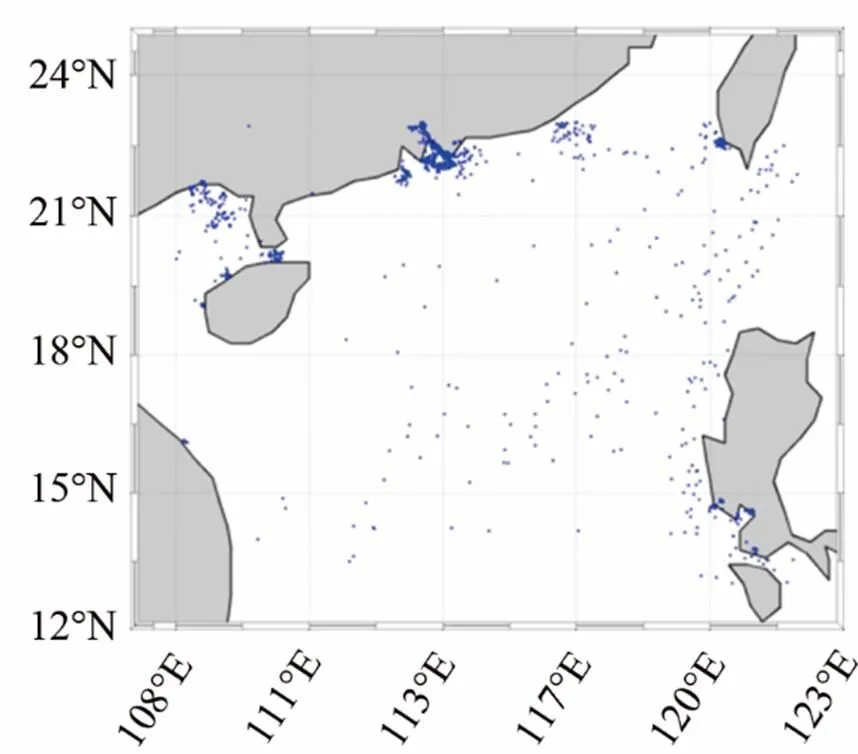
(c) 原始数据(2015年5月)
(d) 融合后数据(2015年5月)
图5 融合前后的船舶分布数据对比
Fig.5 Ship data comparison before and after data fusion
3 船舶噪声的计算分析
3.1 单一船舶声源级计算[16-18]


基于式(5)和融合后得到的南海航船分布数据,计算得到南海航船辐射噪声的噪声源级分布图,如图6所示。
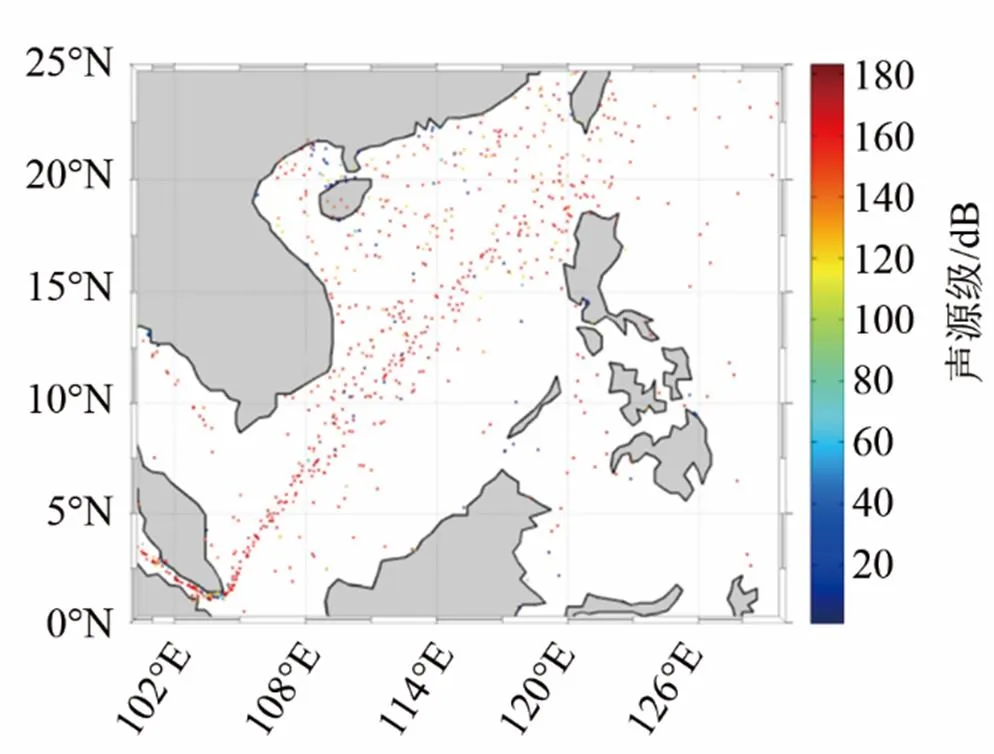
图6 船舶声源级分布
3.2 区域船舶噪声级计算
考虑到某区域的海洋环境噪声的影响因素有船舶、风、爆炸、打桩声等等,各种因素叠加起来才得到该区域真实的海洋环境噪声级。每一区域的声场还受到该区域以及附近海域的海面海底反射以及介质散射的影响。如果考虑到这些,那么传播模型需要精确的海洋环境参数数据,包括:海水声速、海深、海底及海面边界特性参数等等。计算相当复杂也缺少数据,因此本文只考虑船舶因素,并计算区域船舶噪声级。
区域船舶噪声级是了解船舶噪声空间分布以及其对海域内的海洋生物影响的重要参数。以往的区域船舶噪声级计算方法使用的船舶数据主要来自历史船舶数据库(Historical Temporal Shipping,HITS)。它拥有全球最广泛的船舶密度数据,能提供全球范围内以1°*1°为单位的网格内船舶密度的数据,时间精度有月、季、年。其船舶类型包括商船、油轮、大型油轮、超大型油轮以及渔船。由于计算需要具体的船舶方位,所以根据数据库的数据,得到相应海域的船舶密度,然后使用泊松分布函数得到离散的船舶数据。计算时还需要船舶的船速和长度数据,一般使用的是经验数值,如表1所示。本文计算时若部分数据不完整,也采用表1的经验数据。这种计算方法使用的船舶数据都是无法及时更新的以往数据和经验数值,得到的船舶噪声数据与真实测量值的误差是不可避免的。
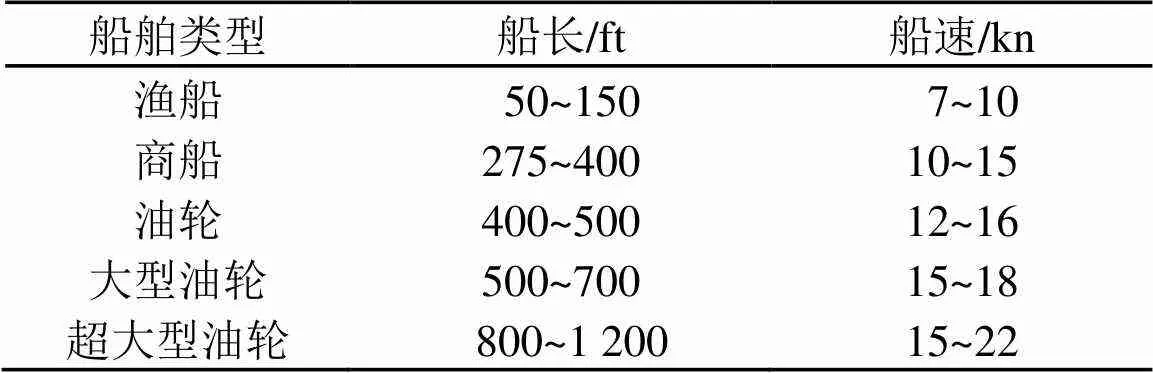
表1 船长、船速的经验数值
为了计算区域的船舶噪声源级,设计了如下计算模型:每一区域的声源级取决于能对该区域产生影响的声源,把这些声源的贡献叠加起来就能得到该区域的声源级。该模型需要的数据有:不同的船舶序号,每艘船舶在不同时刻的坐标,每艘船舶的声源级,每艘船舶在不同时刻的船速(船速不同,产生的声源级也会不同)。具体处理步骤:
(1) 把研究海域根据计算精度划分成大小相同的网格(如1°*1°);
(2) 计算海区内所有船舶的单独声源级;
(3) 计算一定范围内的船舶噪声对每个网格的声级贡献,并去掉“奇点”。奇点指的是当前网格中心坐标1 km距离内的船舶,它会对计算结果产生非常大的影响。
(4) 对结果图像作局部平均以及平滑处理,平滑处理使用Matlab的shading interp函数。
经过与美国HLS研究所的Michael Porter(声学图书馆网站(http://oalib.hlsresearch.com/)的作者)的交流,计算方法的正确性得到了他的认同,并根据其意见在此基础上作了一定改进(包括平滑处理等),结果如图7所示。

图7 区域船舶噪声级分布
4 结论
虽然从第二次世界大战开始,军事领域对于海洋低频噪声的研究和关注就没有中断过,然而所得到的有效数据还是非常匮乏。并且随着海上贸易的发展,船舶数量、吨位和航行距离的增长,旧的数据库已经不再适用。重新调查获取数据所需的人力、物力成本对于任何国家、组织都是非常大的负担,迫切需要一些较低成本的手段来获取有效的数据。本文针对现有的卫星AIS技术在热点海域检测概率不甚理想的问题,利用有限的AIS数据进行融合,融合后的数据能实时反映出海上任意范围内船舶的位置分布和相关参数,提供了海上船舶分布的“快照”,且不需要安装额外的设备。经过本文的方法优化后,卫星AIS检测概率可以大幅度提高。本文把融合数据用于船舶噪声预测,得到区域的船舶噪声级分布图,对于了解船舶噪声时空分布有重要的参考价值。
复杂的海洋环境中,需要综合考虑的问题还有很多。研究结果目前存在不少缺陷:如只考虑了海区内船舶的噪声,对高频部分的噪声还缺少相关的研究;没有对浅、深海等不同的海洋条件进行区分;对于没有安装AIS设备的船舶缺少其数据;没有考虑环境信息,特别是底质的声学特性。所以本文给出的区域船舶噪声级分布图只是初步的结果。然而,我们相信,这些分布图可以在说明船舶噪声时提供一个重要的参考,以便将来做进一步的研究。
[1] 郭新毅.海洋环境噪声研究发展概述及应用前景[J]. 物理, 2014, 11(43): 723-731. GUO Xinyi. Overview of ocean ambient noise and application prospects[J]. Physics, 2014, 11(43): 723-731.
[2] Mcdonald M A, Hildebrand J A, Wiggins S M. Increases in deep ocean ambient noise in the Northeast Pacific west of San Nicolas Island, California[J]. J. Acoust. Soc. Am., 2006, 120(2): 711-718.
[3] Andrew R K, Howe B M, Mercer J A. Long-time trends in ship traffic noise for four sites off the north american west coast[J]. J. Acoust. Soc. Am., 2011, 129(2): 642-51.
[4] 罗斯D [美]. 水下噪声原理[M]. 北京: 海洋出版社, 1983. Ross D. Principle of underwater noise[M]. Beijing: China Ocean Press, 1983.
[5] Ross D. On ocean underwater ambient noise[R]. Acoustics Bulletin January, 1993.
[6] C L Piggott. Ambient sea noise at low frequencies in shallow water of the scotian shelf[J]. J. Acoust. Soc. Am., 1964, 36(11): 2152- 2163.
[7] W W crouch, P J Burt. The logarithmic dependence of surface-generated ambient-sea-noise spectrum level on wind speed[J]. J. Acoust. Soc. Am., 1972, 51(3): 1066-1072.
[8] 石杰, 张效民, 侯铁双, 等. 航船噪声引起的低频海洋环境噪声级发展趋势[J].鱼雷技术, 2010, 18(2): 112-116. SHI Jie, ZHANG Xiaomin, HOU Tieshuang, et al. Noise level evolution of low-frequency ocean ambient noise caused by ship sources[J]. Torpedo Technology, 2010, 18(2): 112-116.
[9] 衣雪娟, 林建恒, 孙军平, 等. 海上航船分布及其对海洋环境噪声的影响[J]. 海洋与湖沼, 2015, 46(6): 1270-1278. YI Xuejuan, LIN Jianheng, SUN Junping, et al. Ship distrbution in open sea and its impact on ocean ambient noise[J]. Oceanologia et Limnologia Sinica, 2015, 46(6): 1270-1278.
[10] 程云, 陈利虎, 陈小前. 星载AIS检测概率建模与仿真分析[J]. 国防科技大学学报, 2014, 36(3): 51-57. CHENG Yun, CHEN Lihu, CHEN Xiaoqian. Modeling and simulation analysis of detection probability for space-based AIS[J]. Journal of National University of Defense Technology, 2014, 36(3): 51-57.
[11] 张昕, 李洪星, 陈萍, 等. 基于实际船舶分布的星载AIS仿真系统设计[J]. 无线电工程, 2014, 44(10): 15-17. ZHANG Xin, LI Hongxing, CHEN Ping, et al. Design of space- based AIS simulation system based on actual ship distribution[J]. Radio Engineering, 2014, 44(10): 15-17.
[12] 宋果林, 邹光南, 王艳峰, 等. 卫星自动识别系统观测模型及检测概率分析[J]. 航天器工程, 2015, 24(4): 136-142. SONG Guolin, ZOU Guangnan, WANG Yanfeng, et al. Satellite-borne AIS observe model and detection probability analyze[J]. Spacecraft Engineering, 2015, 24(4): 136-142.
[13] 刘畅. 船舶自动识别系统AIS关键技术研究[D]. 大连: 大连海事大学, 2013. LIU Chang. Study of key tennology of automatic identification system AIS[D]. Dalian: Dalian Maritime University, 2013.
[14] 张哲, 马桂山.卫星探测AIS的分析及其发展的研究[J]. 航海技术, 2010(3): 38-40. ZHANG Zhe, MA Guishan. Analysis of satellite detection of AIS and study on its development[J]. Marine Technology, 2010(3): 38-40.
[15] Yang M, Zou Y, Fang L. Collision and detection performance with three overlap signal collisions in space-based AIS reception[C]//Trust, Security and Privacy in Computing and Communications (TrustCom), 2012 IEEE 11th International Conference on. IEEE, 2012: 1641-1648.
[16] Hamson R M. The modelling of ambient noise due to shipping and wind sources in complex environments[J]. Applied Acoustics, 1997, 51(3): 251-287.
[17] 汪德昭, 尚尔昌. 水声学M]. 2版. 北京: 科学出版社, 2013. WANG Dezhao, SHANG Erchang. Underwater acoustics[M]. 2ndedition. Beijing: Science Press, 2103.
[18] 刘伯胜, 雷家煜. 水声学原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 2009: 235-248. LIU Bosheng, LEI Jiayi. Underwater acoustics principle[M]. Harbin: Harbin Engineering University Press, 2009: 235-248.
Research on pelagic ship noise distribution
XUE Rui-chao, YANG Yan-ming, HUANG Er-hui, WEN Hong-tao
(Third Institute of Oceanography, State Oceanic Administration, Xiamen 361005, Fujian, China)
As the number of ships continues to grow, the quantities of goods carried and the distances of ship traveled have made the sea ambient noise level dramatically rising, which impacts on the marine environment increasingly worse. Moreover, the ship history database can not reflect the real situation and is no longer applicable. Especially for the pelagic ships, there is a shortage of data available. With the aim of palliating this situation, this paper puts forward a data fusion method of multi-source AIS, which can get the every hour distribution of ships and then calculate the regional ship noise level for sound mapping.
sea ambient noise; noise levels of ships; satellite-based AIS (Automatic Identification System); open sea
OP733.22
A
1000-3630(2017)-05-0467-06
10.16300/j.cnki.1000-3630.2017.05.012
2017-01-13;
2017-05-09
国家海洋局第三海洋研究所基本科研业务专项(海三科2015016)、福建省科技计划项目(2016H0018)
薛睿超(1988-), 男, 福建惠安人, 硕士, 研究方向为船舶噪声, AIS数据分析。
杨燕明, E-mail: yangyanming@tio.org.cn