纯电动牵引车动力系统参数匹配与仿真
2017-11-27赵强曲万达张国栋陈丽君
赵强 曲万达 张国栋 陈丽君
(中国第一汽车股份有限公司技术中心,长春 130011)
纯电动牵引车动力系统参数匹配与仿真
赵强 曲万达 张国栋 陈丽君
(中国第一汽车股份有限公司技术中心,长春 130011)
以某纯电动牵引车为研究对象,依据汽车动力性、经济性指标对该牵引车的电机和动力电池进行了选型和参数匹配。利用CRUISE软件搭建了性能仿真模型,针对不同工况对该车进行了最高车速、加速时间、最大爬坡度及经济性仿真分析。仿真结果与试验结果对比表明,该纯电动牵引车动力系统参数匹配过程合理,仿真分析方法可靠有效。
1 前言
目前,大部分纯电动商用车是在原柴油车的基础上进行改装,导致整车动力性、经济性发生变化[1]。由于纯电动商用车具有唯一的动力系统,驱动和制动控制策略相对固定,因此合理的动力系统参数匹配是提高纯电动商用车性能的重要手段之一。相关学者针对动力系统参数匹配问题进行了研究,如,何洪文等[2]着重分析了电机的动力特性,对完成电动汽车动力系统的参数匹配具有重要理论意义;刘灵芝等[3]建立了某型纯电动汽车的动力系统结构和控制策略,提出了动力系统参数匹配设计方法;张抗抗等[4]选择若干个可优化指标,建立参数匹配的目标优化模型,并通过遗传算法对动力系统进行参数匹配;周飞鲲[5]以提升整车性能为目标,对纯电动汽车动力系统参数匹配进行了研究,并进行了对比仿真分析。上述研究往往以整车动力性为指标进行参数匹配,缺少对经济性的综合考虑。
本文以某纯电动牵引车为研究对象,依据汽车动力性和经济性指标,对电机、动力电池等关键总成进行了参数匹配,并利用CRUISE软件对整车进行了性能仿真及试验验证,为纯电动牵引车动力系统参数匹配及性能优化提供了依据和支撑。
2 纯电动牵引车特性分析
2.1 构型方案
纯电动牵引车动力系统的构型较为灵活,主要包括电机直驱、轮边电机及电机+变速器等方案,如图1所示。电机直驱方案(图1a)相对比较简单,没有变速器进行变速,低速时电机需要具有较大的扭矩;轮边电机方案(图1b)中没有传动轴、后桥主减速器,传动效率较高,但非簧载质量较大,影响汽车平顺性,而且开发成本较高;电机+变速器方案(图1c)在汽车爬坡或起步时可输出较大扭矩,整车行驶时电机转速可以维持在较高的效率区,因此本文采用电机+变速器方案。
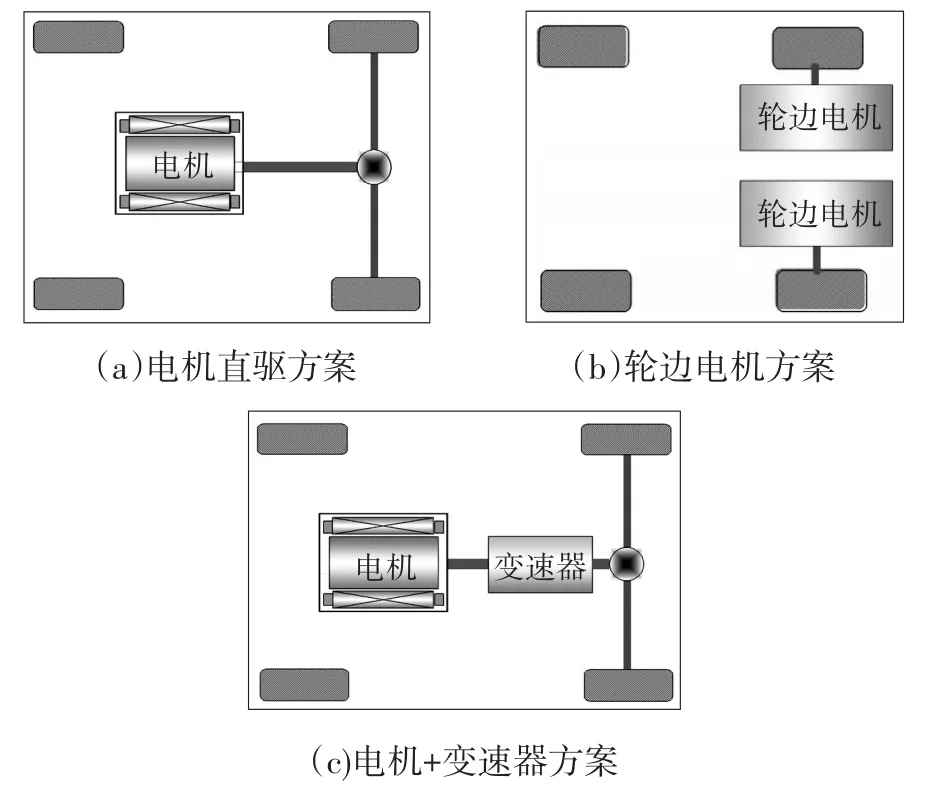
图1 纯电动牵引车主要结构构型
2.2 基本构成
纯电动牵引车主要由底盘、车身、动力系统及电动附件等组成,其动力系统主要由动力电池及管理系统、驱动电机及控制系统等组成[6],电动附件主要包括空调压缩机、PTC加热器、转向油泵、空气压缩机等。纯电动牵引车主要总成部件如图2所示。
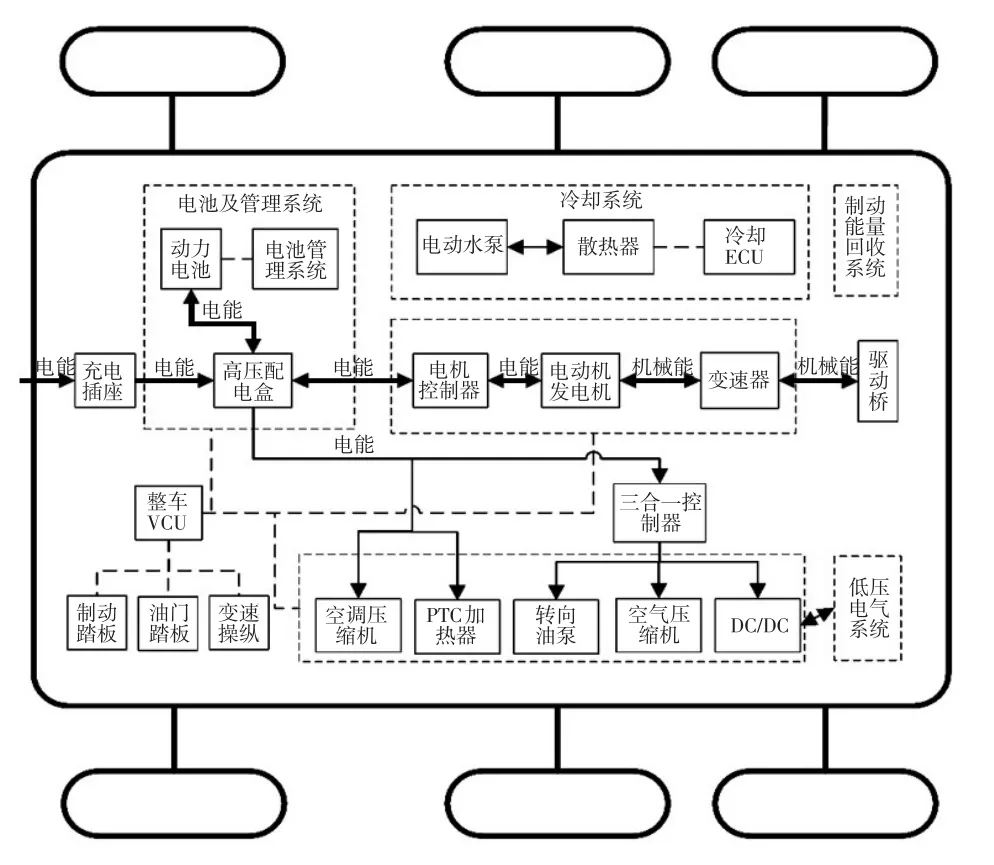
图2 纯电动牵引车主要部件
3 纯电动牵引车动力系统参数匹配
纯电动牵引车动力系统参数匹配是根据整车的设计指标要求对动力系统部件进行选型和参数确定,主要针对电机和动力电池进行参数匹配。
3.1 整车参数
本文所研究的车型为6×4纯电动牵引车,其整车参数如表1所示。
3.2 电机参数确定
3.2.1 电机功率
电机的额定功率和峰值功率是电机的重要参数,关系到电动车的安全及性能。一定条件下电机具有过载能力,能够短时间内工作在峰值功率,此时电机能够输出较大的扭矩,但电机过载时间过长会造成电机内线圈过热,能量以热量形式损失。通常情况下根据电动车的最高车速确定额定功率,根据最大爬坡度和加速时间确定峰值功率[7~9]。

表1 纯电动牵引车整车参数
a.根据最高车速确定电机功率,计算式为:

式中,ηT为动力传动系统效率;M为整车满载质量;g为重力加速度;f为滚动摩擦系数;CD为风阻系数;A为迎风面积;Vmax为最高车速。
b.根据最大爬坡度确定电机功率,计算式为:

式中,Vn为爬坡车速;α为坡度角。
c.根据加速时间确定电机功率,计算式为:

式中,δ为旋转质量换算系数;Vt为t时刻的车速;t为0~Vt的加速时间。
将整车参数代入式(1)~式(3)可求出所需的电机功率,结果如表2所示。
由上述计算结果可知,电机额定功率应不小于212 kW,电机峰值功率应不小于332 kW。
3.2.2 电机转速
车速越高时电机的转速也越高,根据式(4)可确定电机额定转速:

表2 所需电机功率

式中,n为电机额定转速;ig为变速器最高挡位速比;i0为驱动桥速比;r为轮胎滚动半径。
将各参数代入式(4)得电机额定转速为1 860 r/min。
综合以上电机功率及转速计算结果,同时结合目前市场上的电机资源,本文匹配的电机基本参数如表3所示,电机特性曲线如图3所示。
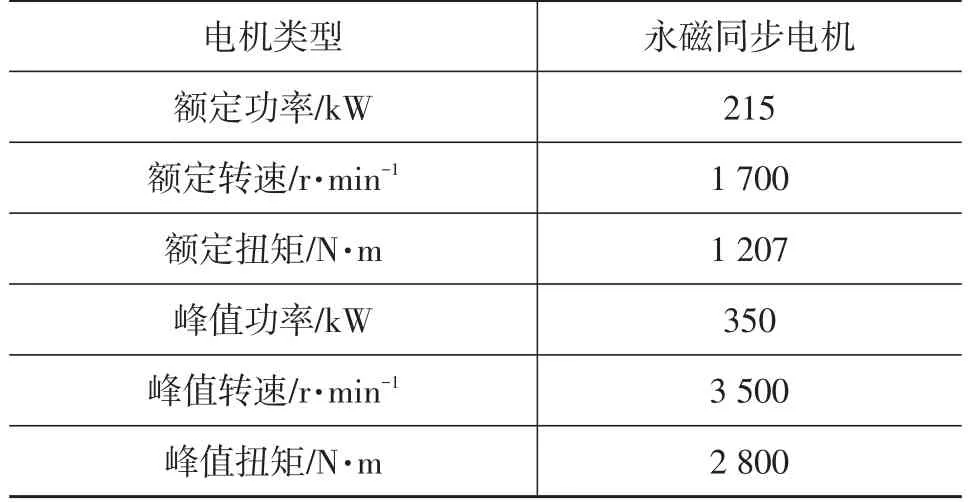
表3 电机基本参数

图3 特性曲线
3.3 动力电池参数确定
动力电池是纯电动牵引车的唯一动力源,因此必须满足车辆行驶时输出的最大功率和车辆的续驶里程。
a. 根据峰值功率计算电池的最大放电功率[10],计算式为:

式中,Pbmax为动力电池的最大放电功率;Pemax为电机峰值功率;Pimax为电动附件峰值功率;ηb为动力电池放电效率。
将电机的峰值功率(332 kW)、电动附件峰值功率(取6.2 kW)、动力电池放电效率(取0.94)代入式(5),可得动力电池最大放电功率为360 kW。
b. 根据续驶里程计算动力电池电量[10],计算式为:

式中,Qb为动力电池电量;L为续驶里程;Vh为行驶车速;Ph为Vh对应的电机功率;SOC=20%为最小剩余电量。
当整车满载以40 km/h车速行驶时,由式(1)可得电机功率为43.7 kW,可求得动力电池电量为298 kW·h。
综合以上动力电池参数计算结果,本文匹配的动力电池基本参数如表4所示。

表4 动力电池基本参数
4 基于CRUISE的纯电动牵引车性能仿真
4.1 仿真建模
纯电动牵引车是后轮驱动,根据该车构型,车辆的驱动力由电机发出,经过变速器、轴间差速器、主减速器、轮间差速器、半轴传到驱动轮。利用CRUISE仿真软件提供的元件库建立仿真模型,按各元件的信号或能量输入、输出关系进行总线数据连接和连接线连接,并对动力性指标(包括最高车速、最大爬坡度、加速时间)和经济性指标(包括吨百公里耗电量)进行仿真。纯电动牵引车仿真模型如图4所示[11]。
4.2 最高车速和加速时间仿真
根据标准GB/T 18385—2005《电动汽车动力性能试验方法》中的要求,在计算任务中进行加速行驶设置,得到电机转速、功率、扭矩及整车车速、加速时间的仿真结果,如图5和表5所示。
由图5可看出,当加速时间tlt;50 s时,电机转速小于1 200 r/min,处于低转速区,电机扭矩保持最大值,随着电机转速的升高,电机功率增大,整车车速随之升高;当t=50 s时,电机转速达到1 200 r/min,车速达到58 km/h,电机功率达到最大值;当tgt;50 s时,电机转速继续升高,受恒功率特性的限制,电机扭矩持续下降,而车速继续升高;当t=95 s时,电机转速达到1 880 r/min,电机扭矩达到最小值,车速达到最大值为91 km/h。当t=74.2 s时,车速达到80 km/h,由于采用12挡变速器,每挡换挡的放电功率为50.8 kW。
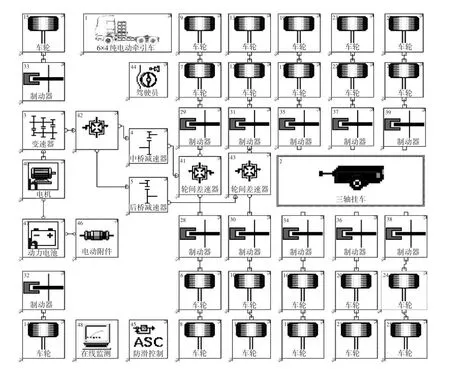
图4 纯电动牵引车仿真模型

图5 纯电动牵引车加速行驶仿真结果

表5 纯电动牵引车加速时间仿真结果
4.3 最大爬坡度仿真
在计算任务中进行爬坡行驶设置,对每挡位进行爬坡度仿真,仿真结果如表6所示。由表6可知,纯电动牵引车最低挡时的最大爬坡度为27.87%。
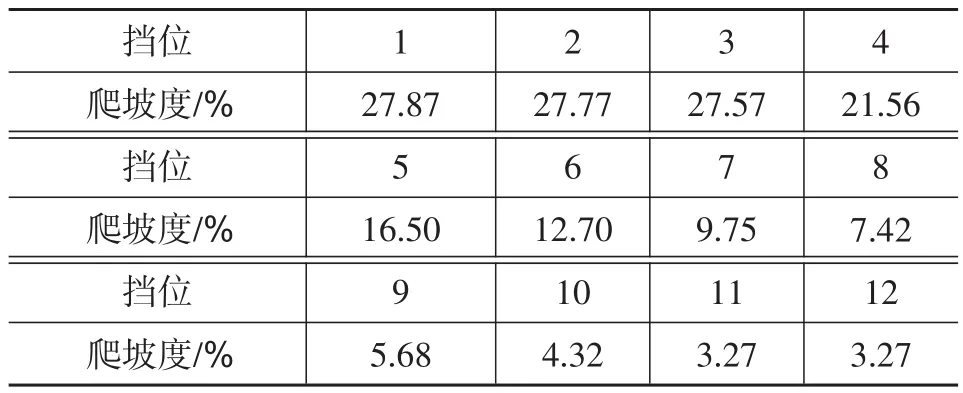
表6 纯电动牵引车各挡位爬坡度
4.4 经济性仿真
在循环工况计算任务中进行等速行驶设置,将车速设为40 km/h,得到等速工况动力电池的放电功率曲线如图6所示。由图6可看出,在40 km/h等速下动力电池

图6 等速工况动力电池的放电功率曲线

式中,Et为吨百公里耗电量;M为列车总质量;P为电池
根据耗电量计算式(7)可求出吨百公里耗电量:放电功率;V为整车车速。
该牵引车的总质量为49 t,动力电池放电功率为50.8 kW,整车车速为40 km/h,将这些参数代入式(7),得到吨百公里耗电量为2.59 kW·h。
5 试验对比
为验证参数匹配过程的合理性以及仿真模型的可信性和可行性,对纯电动牵引车进行了动力性、经济性试验,仿真与试验对比结果如表7所示。由表7可知,最高车速、加速时间及耗电量的仿真结果与试验结果误差分别为2.2%、2.6%和5.7%。该结果表明,纯电动牵引车的动力性和经济性仿真指标与实车试验结果比较吻合,误差在可接受范围内。

表7 动力性、经济性仿真与试验结果对比
6 结束语
本文以某纯电动牵引车为研究对象,分析了其动力系统基本构型,并确定以电机+变速器为构型方案,根据整车性能指标对其电机及动力电池进行了选型和参数匹配。通过CRUISE软件搭建了性能仿真模型,针对不同工况对该车进行了最高车速、加速时间、最大爬坡度及经济性仿真分析。仿真结果与试验结果对比表明,该纯电动牵引车动力系统参数匹配过程合理,仿真分析方法可靠有效。
1 姬芬竹,高峰.电动汽车驱动电机和传动系统的参数匹配.华南理工大学学报(自然科学版),2006,34(4):33~37.
2 何洪文,余晓江,孙逢春,等.电动汽车电机驱动系统动力特性分析.中国电机工程学报,2006,26(6):136~140.
3 刘灵芝,张炳力,汤仁礼.某型纯电动汽车动力系统参数匹配研究.合肥工业大学学报(自然科学版),2007,30(5):591~593.
4 张抗抗,徐梁飞,华剑锋,等.基于多目标优化的纯电动车动力系统参数匹配方法.汽车工程,2015,37(7):757~765.
5 周飞鲲.纯电动汽车动力系统参数匹配及整车控制策略研究:[学位论文].长春:吉林大学,2013.
6 王钲强,宋书全.纯电动汽车的设计与开发.汽车技术,2013(2):26~28,35.
7 周胜.纯电动汽车动力性及经济性分析:[学位论文].长沙:湖南大学,2013.
8 余志生主编.汽车理论.北京:机械工业出版社,2006.
9 郑慧勤.纯电动汽车动力系统的设计与实现:[学位论文].武汉:武汉理工大学,2009.
10 杨峰.纯电动汽车动力系统参数匹配与优化:[学位论文].合肥:合肥工业大学,2013.
11 袁苑.中型纯电动客车动力参数匹配仿真及再生制动研究:[学位论文].合肥:合肥工业大学,2012.
(责任编辑 文 楫)
The Parameters Matching and Simulation of Pure Electric Tractor Power System
Zhao Qiang,Qu Wanda,Zhang Guodong,Chen Lijun
(China FAW Corporation Limited Ramp;D Center,Changchun 130011)
Type selection and parameter matching were carried out for motor and power battery of a pure electric tractor according to vehicle power and economic index.Performance simulation model was built in CRUISE environment,and simulation analysis was made regarding maximum speed,acceleration time,maximum gradeability and economy under different driving conditions.Simulation results were compared with test results,which show that the power system parameter matching process of this electric tractor is rational,the simulation analysis method is reliable and effective.
Pureelectrictractor,Parameter match,Simulation
纯电动牵引车 参数匹配 仿真
U462 文献标识码:A 文章编号:1000-3703(2017)09-0053-05
