基于DGPS的非稳态条件下空速校准方法
2017-11-24屈飞舟
屈飞舟
(中国飞行试验研究院,技术中心飞机所,陕西 西安 710089)
基于DGPS的非稳态条件下空速校准方法
屈飞舟
(中国飞行试验研究院,技术中心飞机所,陕西 西安 710089)
准确的空速和高度是进行飞行试验和确保飞行安全的基础,最新的民用运输类飞机适航标准要求在飞机全包线范围内都要进行空速系统校准。飞机在地面滑跑阶段和失速过程中速度是急剧变化的,而传统的空速校准方法只适用于飞机稳定平飞的状态。介绍了DGPS综合法的原理,利用DGPS高度差与飞机压力高度差之间的关系,获得了非稳态条件下空速系统的位置误差结果,并成功应用于国产支线飞机的合格审定试验。
DGPS;空速指示系统校准;几何高度;非稳态;位置误差
0 引 言
飞机飞行高度、速度和马赫数是最基本的飞行参数,确保这些参数准确是进行飞行试验和保障飞行安全的基础,因而空速指示系统的校准是飞行试验的基础科目之一。运输类飞机适航标准规定空速指示系统必须经过校准,最新的适航标准扩大了校准的速度范围。空速指示系统必须在地面滑跑阶段以及从失速速度到最大俯冲验证速度的整个速度包线内进行校准。传统的GPS方法和拖锥法需要飞机在稳定平飞状态下进行空速指示系统的校准。飞机在地面滑跑阶段和失速阶段无法使用传统校准方法进行空速指示系统的校准。
差分全球定位系统(DGPS)是把一部GPS接收机放在位置已精确测定的基准点上,将此接收机提供的定位数据与其基准相比较,以求得GPS系统在该点的误差。将这些误差通过基准点的差分台播发出去,周围用户在接收到来自差分台的误差信号后,用其来校准自己的GPS测试值,从而达到提高精度的目的。DGPS精度高,实施简单,可作为重要的时间和空间位置信息系统[1]。
本文介绍了飞机在地面起飞加速滑跑阶段和失速过程中如何应用DGPS综合法进行空速指示系统校准的数据处理方法。
1 相关标准和规范要求
民用运输类飞机适航标准关于空速指示系统有如下规定[2]:
1) 空速指示系统必须加以校准,以确定飞行时和地面起飞加速滑跑过程中的系统误差(即指示空速和校正空速的关系)。进行地面滑跑校准时,必须按照下列条件:
① 对于批准的高度和重量范围,速度从 0.8V1最小值至V2的最大值;
襟翼位置和发动机功率(推力)的调定按第25.111条制定起飞航迹时所确定的值,
② 假设临界发动机在V1最小值时失效。
2) 在下列状态的整个速度范围内,空速的安装误差(不包括空速指示仪表校准误差)不得超过3%或5节,两者中取大值:
① 从VMO至1.23VSR1,襟翼在收上位置;
② 从1.23VSRO至VFE,襟翼在着陆位置。
3) 从1.23VSR到失速警告开始的速度,指示空速随校正空速必须明显地变化并且趋势相同,并且在低于失速警告速度的速度下指示空速不得以不正确的趋势发生变化。
4) 从VMO到VMO+2/3(VDF-VMO),指示空速随校正空速必须明显地变化并且趋势相同,并且在直到VDF的较高速度下指示空速不得以不正确的趋势发生变化。
与R3版运输类飞机适航标准相比,增加了第(3)和(4)项,即需要在失速试飞和高速俯冲试飞中进行空速指示系统校准。目前国内在军机鉴定试飞中通常采用的GPS速度法需要正反航向稳定平飞,同时考虑侧风分量的影响[3]以确定空速指示系统的误差,显然已经不能满足民用飞机适航取证试飞的要求。民用运输类飞机使用的拖锥法由于在失速过程中获得的数据不够稳定,难以获得适航的认可。同时地面起飞加速滑跑过程中使用的捕集式静压瓶法,操作复杂,也需要改进。因而必须探索新的空速指示系统校准试飞方法及数据处理方法以满足我国民用运输类飞机研制的需要。
2 DGPS综合法
2.1几种高度之间的关系
在讨论使用DGPS高度进行飞机空速指示系统校准之前,先介绍几种高度之间的关系[4]。
1) 重力势高度与压力高度之间的关系:
hgeo=hp-96.0343×(Tatm-Tstd)×ln(δ) .
(1)
压力高度变化在一定范围内,压力与高度可近似为线性关系,可以使用式(2)计算重力势高度的变化。
(2)
式中:hgeo为重力势高度;hp为压力高度;Tstd为标准大气温度;Tatm为试验时的大气温度; Δhgeo为重力势高度差; Δhp为压力高度差;δ为压力比。
2) 重力势高度与几何高度之间的关系[5]:

(3)
gφ,SL=32.17244×[1-2.6373×10-3×
cos(2φ)+5.9×10-6cos2(2φ)] ,
(4)
简化之后有:
(5)
从而有:
(6)
式中:ht为几何高度;r为地球半径;g0为标准重力加速度;gφ,SL纬度φ处的海平面重力加速度。
3) 几何高度差与压力高度差之间的关系:
在飞行的高度范围内ht远远小于r,则综合公式2)和式6),可得几何高度差与压力高度差之间的关系为
(7)
GPS高度的基准为大地水准面。一个与处于流体静平衡状态的海平面(无浪、无潮汐、无水流和大气压力变化引起的扰动)重合并延伸到陆地区域的水准面称为大地水准面。因而GPS高度与几何高度的本质相同,二者的差别仅是基准面不同,因而有:

(8)
式中, ΔhGPS为GPS高度差。
2.2DGPS综合法
通过几何高度差与压力高度差之间的关系,将DGPS高度差换算成压力高度差,这是DGPS综合法的本质。
DGPS综合法进行空速指示系统校准的具体实施方法如下:
1) 确定静压基准点,将该点的静压值换算成高度,记为基准高度,同时记录该点的DGPS高度;
2) 试飞过程中记录每一点的DGPS高度;
3) 计算试飞过程中每一点与基准点的DGPS高度差,通过公式(8)将DGPS高度差换算成压力高度差;
4) 得到的压力高度差加上基准高度,即为某一刻的校准高度;
5) 校准高度减去每一刻飞机的大气机记录的高度,即可得空速指示系统的高度误差;
6) 通过校准高度也可得到真实静压,从而可以得到空速指示系统的静压误差以及空速误差。
2.3DGPS高度的精度
DGPS是把一部GPS接收机放在位置已精确测定的基准点上,将此接收机提供的定位数据与其基准相比较,以求得GPS系统在该点的误差。表1示出了通过事后载波相位差分处理的DGPS的定位精度。

表1 事后载波相位差分定位测量定位精度
DGPS数据精度高,可以满足飞行试验的要求。
3 飞行试验及结果分析
3.1地面滑跑加速阶段空速指示系统校准
某型飞机地面空速指示系统校准采用DGPS综合法。飞机运动时空速管头部和静压孔测得的压力值不完全与真实值相等[6],飞机静止时静压孔测量值则可作为周围大气压力的值。飞机起飞前,在起飞线静止5 s,记录此时的DGPS高度和飞机压力高度,作为基准点数据,把起飞过程中的DGPS高度与滑跑前记录的DGPS高度的差值换算成压力高度,叠加在飞机滑跑前压力高度的记录值上,经过换算后的高度作为基准高度。通过基准高度得到基准静压,与飞机大气数据计算机中的静压进行比较,得到起飞过程中的空速系统误差。
图1示出了该型飞机在两种不同重量下,在起飞滑跑阶段的空速指示系统速度误差。图中横坐标Vi为飞机的指示空速,纵坐标ΔV为空速指示系统速度误差。
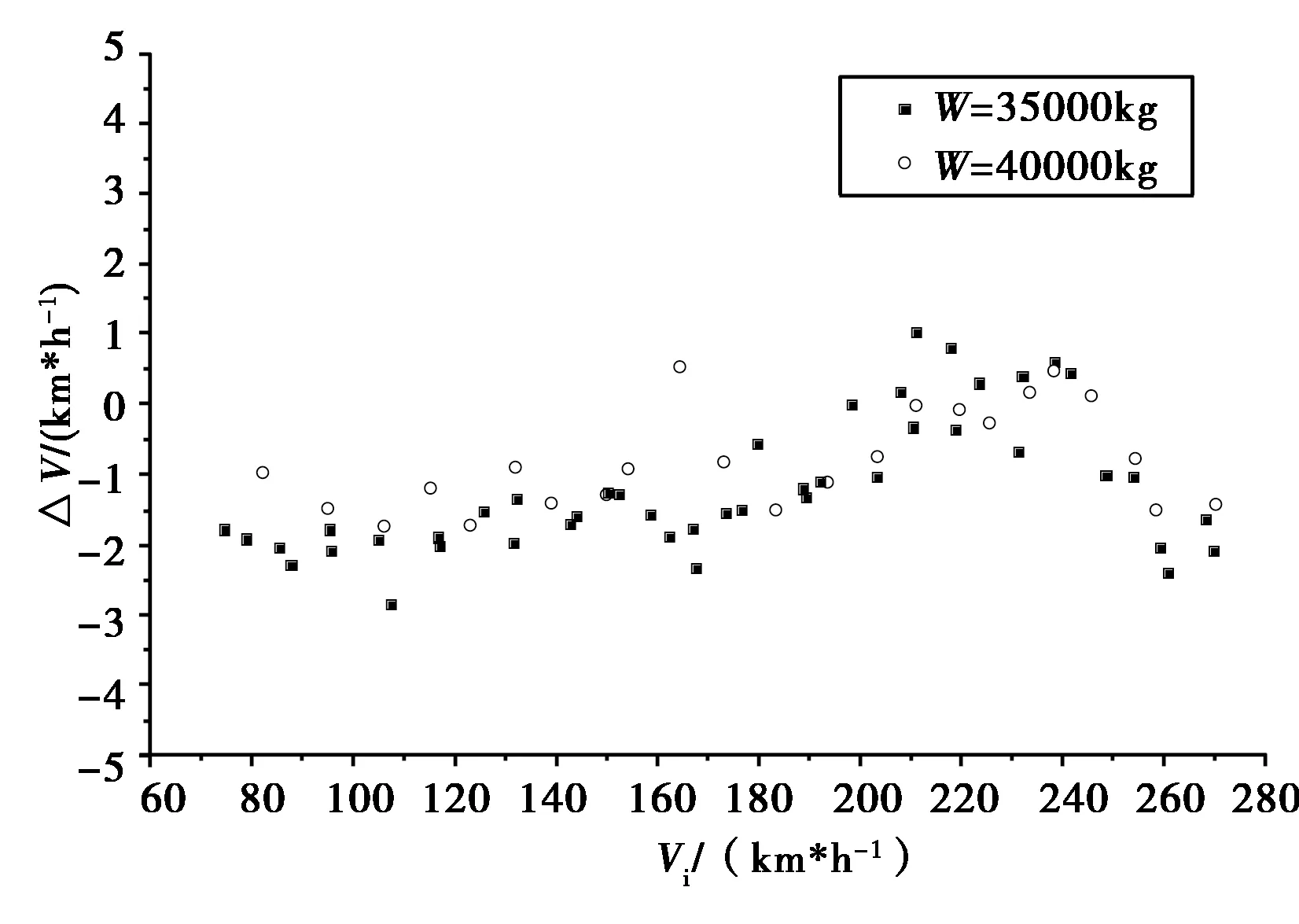
图1 空速指示系统速度误差
3.2失速阶段空速指示系统校准
某型飞机失速阶段的空速指示系统校准采用DGPS综合法与拖锥结合的方法进行。飞机以1.23 VSR的速度稳定平飞10 s,然后以约0.5 m/s2的减速率减速直至推杆器工作。记录平飞时的DGPS高度和拖锥静压。把减速过程中的DGPS高度与平飞时DGPS高度的差值按照公式(8)换算成压力高度差,叠加到平飞时的拖锥高度上,将此时得到的高度换算成压力作为失速阶段的基准静压,从而可以得到飞机的校正空速。
图2示出了某型机起飞构型下空速误差的适航条款符合性分析。图中横坐标Vc为校正空速,纵坐标Vi为飞机的指示空速。图中黑色实线的斜率为0.75,因为在AC25-7C中,对于1.23倍的基准失速速度到失速警告开始的速度之间,速度必须明显地变化的解释为指示空速随校正空速的变化率不低于0.75[7].
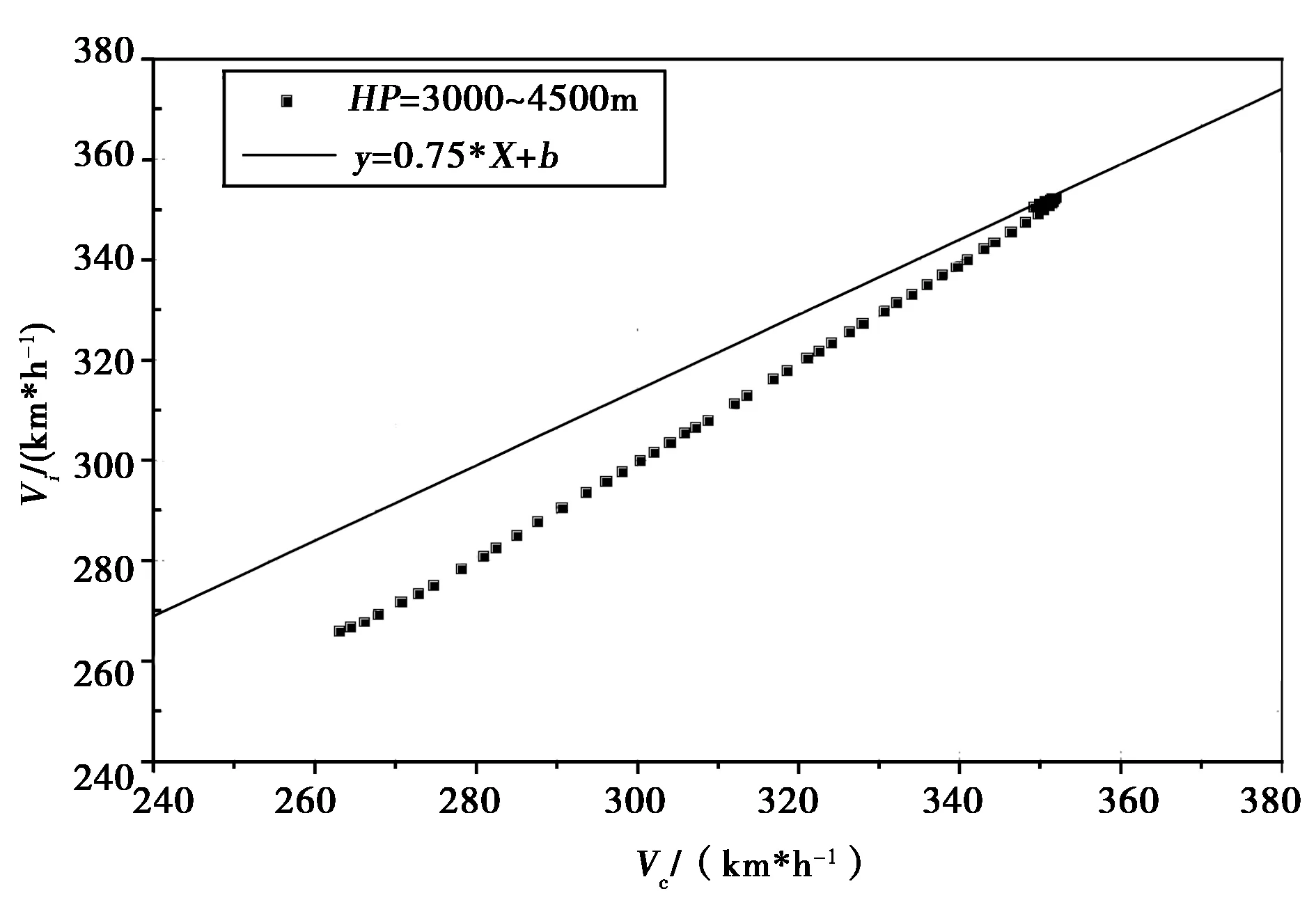
图2 空速系统指示空速随校正空速的变化
从图2中可以看出飞机在该构型下空速指示系统的误差满足适航条款的规定。
4 结束语
适航取证是研制民用运输类飞机的关键过程,空速系统校准是适航取证过程中进行的第一项飞行试验科目,对于飞机取证意义重大。本文利用DGPS高度与几何高度和飞机压力高度之间的关系,形成了DGPS综合法,并给出了该方法的试验程序,解决了民用运输类飞机在地面滑跑和失速等非稳态条件下空速位置误差的获取难题。应用DGPS综合法已成功完成了国产新支线客机在全包线范围内的非稳态条件下的空速系统校准合格审定飞行试验,该方法将更好地服务于我国大飞机的发展。
[1] 梁远东,马菲,乐娅菲,等.DGPS在空速校准中的应用[J].科技创新导报,2012(30):69.
[2] 中国民用航空局.中国民用航空规章第25部运输类飞机适航标准[S]. 2011:132-133.
[3] 郗超,成婷婷,刘静.基于GPS的侧风影响下的空速校准方法研究[J].航空科学技术,2015,26(5):53-56.
[4] BLAKE W. Jet transport performance methods[M]. Boeing Co.2009.
[5] 樊尚春,吕俊芳,张庆荣,等. 航空测试系统 [M].北京:北京航空航天大学出版社,2005:234-252.
[6] 高艳辉,李志宇,肖前贵.基于GPS、磁罗盘与大气数据计算机的无人机风估计[J].计算机测量与控制,2017,25(3):231-239.
[7] U.S. Department of Transportaton.AC25-7C flight test guide for certification of transport category airplanes [R].Federal Aviation Administration,2012:253-257.
CalibrationMethodofAirspeedBasedonDGPSinUnsteadyState
QUFeizhou
(ChineseFlightTestEstablishment,AirplaneInstituteofTechnicalcenter,Shaanxi,Xi′an710089,China)
Accurate airspeed and altitude are the basis for flight testing and ensuring flight safety. The latest airworthiness standard for civil transport airplane requires airspeed system should be calibrated in the full envelope of the airplane. The speed of the airplane on the ground roll stage and stall process is rapidly changing, and traditional airspeed calibration method is only applicable for stable state. This paper introduces the principle of DGPS method, using the relationship between DGPS height difference and the pressure height difference, to obtain the results of airspeed system position error under non steady state conditions. And this method has successfully applied on domestic regional airplane flight tests.
DGPS; airspeed indicator system calibration; geometric height; unsteady state; position error
10.13442/j.gnss.1008-9268.2017.05.012
V217.1
A
1008-9268(2017)05-0059-04
2017-07-18
联系人: 屈飞舟 E-mail: qfz05@163.com
屈飞舟(1986-),男,工程师,主要从事民用飞机飞行性能适航取证飞行试验研究和空速系统校准试飞研究。
