基于北斗的全海深装备定位与通信系统设计与实现
2017-11-24陈忠郭威周悦王彪
陈忠,郭威,周悦,王彪
(1.上海海洋大学 工程学院,上海 201306; 2.上海深渊科学工程技术研究中心,上海 201306)
基于北斗的全海深装备定位与通信系统设计与实现
陈忠1,2,郭威2,周悦1,2,王彪2
(1.上海海洋大学 工程学院,上海 201306; 2.上海深渊科学工程技术研究中心,上海 201306)
基于北斗双模工作模式,设计一种将全海深海洋装备的地理位置信息提供给母船或控制中心的定位与通信系统。提出使用卫星无线电导航业务RNSS模式进行定位,并将位置及待传输信息通过卫星无线电测定业务RDSS模式发送至接收模块;采用光敏、倾角和温度多传感器组合冗余实现海洋装备作业环境的全天候有效检测,进而通过单片机控制北斗模块的休眠与唤醒及北斗系统RDSS/RNSS模式间切换。定位测试试验和马里亚纳海沟海试结果表明,所设计的全海深定位与通信系统不仅具有很高的快速定位成功率,而且能够有效节约电池电量和实现短报文信息传输。
北斗双模;定位;短报文通信;全海深装备;低能耗
0 引 言
21世纪是“海洋世纪”。为重点突破制约我国在深海领域发展能力的核心关键技术,国家科技部于2016年2月发布的“十三五”重点专项“深海关键技术与装备”备受国内众多研究机构和高校的关注[1]。作为全海深装备关键技术之一的卫星定位与通信系统就是保证及时获取浮出海面装备的信息,以便母船上工作人员及时完成对深海洋装备信息的收集、装备的回收与检修,尤为重要。
我国自主研制的北斗系统除了具有无线电导航业务RNSS(Radio Navigation Satellite System)还具有其他卫星导航系统所不具备的无线电测定业务RDSS(Radio Determination Satellite Service)模式的短报文通信功能[2-4]。基于北斗卫星导航系统刘晋川等设计了海上溢油跟踪浮标[5]、北斗星通公司发明了双模船载终端[6]、万常凡等发明了一种北斗短报文通信及北斗/GPS定位终端[7],这些研究成果极大地促进北斗卫星定位与通信的发展与应用。目前,国际上通常采用GPS和铱星组合模式来进行海洋装备定位[8-9],而由我国自主研制的北斗导航定位系统不仅在功能上能够满足定位与通信的要求,且从经济性、安全保密性和可定制化角度,更优[10]。本文基于北斗双模模式切换技术和多传感器冗余组合技术,设计一种适用于全海深海洋装备的定位与通信系统。
1 系统组成
全海深海洋装备的定位与通信系统包括一个位于母船(控制中心)接收/发送终端和一个安装于海洋装备顶部的接收/发送终端。后者为核心,主要由单片机主控模块、北斗定位与通信模块、传感器模块和电源模块组成,置于密封的玻璃球体之内,由磁力开关控制其通断,结构图如图1所示。
单片机模块是系统的大脑,负责光敏、倾角和温度信号的采集、处理及控制北斗定位通信模块工作。本系统选用超低功耗的MSP430系列单片机[11]。
北斗定位与通信模块担负定位及与母船通信功能。北斗系统RDSS模式即可以发送短报文信息,又可以进行定位,但其定位精度低、能耗大、速度慢;RNSS模式尽管无短报文通信功能,但定位精度高,速度快、能耗低。结合北斗两种工作模式特点,故采用RNSS模式定位,RDSS模式进行短报文通信,并由单片机进行模式切换,即首先通过北斗卫星的RNSS模式进行位置定位,定位成功后再使用RDSS模式将全海深海洋装备的地理位置信息及相关测量信息发送给母船或者控制中心。本文采用北斗星通公司的BDM-910模块。
为尽可能减少电源能耗,仅在全海深海洋装备作业浮出海面后唤醒北斗定位与通信模块工作。本文采用多传感器冗余的方式,即通过光的变化、海浪波动和温度变化来判断海洋装备是否浮出水面,为此由单片机采集光敏传感器、倾角传感器和温度传感器的信息来决定系统是保持继续休眠还是进入正常工作模式,在判断设备浮出海面之后,触发单片机从低功耗的状态唤醒,同时开启北斗通信模块。
电源模块为系统提供独立能源供电。整套定位与通信系统密闭在内径为159 mm的深海玻璃球体内,且作业时不可中途充电,故对电池的尺寸和电池的容量都有很高的要求,本文选用电池容量10 000 mAh,故障率1/300 000的上海亚莱新能源科技有限公司的LFR1210P7A型号磷酸铁锂电池。
2 定位通信工作原理及设计
2.1定位通信原理
在海洋装备浮出海面后,安装于海洋装备顶部的接收/发送终端首先通过RNSS模式对北斗卫星发送定位申请,卫星将定位申请发送至地面卫星基站,地面基站计算地理位置信息,并反馈给定位终端。定位终端在接收到位置信息后通过RDSS模式以短报文形式将位置信息发送至母船(控制中心)接收终端,并由上位机显示出来[12,13],定位与通信过程如图2所示。

图2 北斗定位与通信过程示意图
2.2系统软件设计
本系统通过单片机编程实现全海深海洋装备工作状态的判断、北斗通信模块的开启、定位申请以及信息发送,其中传感器优先级为光感gt;倾角gt;温度,系统主程序流程图如图3所示。

图3 单片机主程序流程图
3 试验测试与分析
完成硬件原理图、PCB电路板制作、程序编写与调试以及电源、传感器等各个模块测试后,对系统进行整体组装,并安装在全海深着陆器上,系统组装及水池试验图如图4所示。
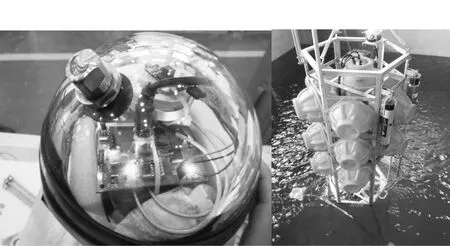
图4 系统组装及水池试验图
3.1定位与通信性能测试
为了验证系统定位的精确度,选取10个经纬度确定的点作为基点。每个基点在相同的试验条件下,利用北斗定位终端对每个基点定位测试10次。图5(a)为以纬度30.889 032°N,以经度121.891 712°E为基点所得到的试验定位信息,将试验测得到的定位经纬度信息导入谷歌地图,得到图5(b)的试验位置卫星图。将定位系统的短报文通信频度通过单片机程序设定为每分钟一次,系统在完成定位后将及时将定位信息发送至接收终端,接收终端可根据接收到的通信信息自动生成包含通信时间和位置信息的记事本文件,所得到的通信记事本文件如图6所示。
3.2定位精度分析
因为地球是一个标准的椭球体,它的赤道半径约为6 378.140 km,极半径约为6 356.752 km2,平均半径约为6 371 km.假设地球是一个完美的球体,半径为R,以0°经线为基准线,则根据地球表面上任意两点的经纬度便可求出两点间的理论地表距离[14]。设第一点A的经纬度为(LonA,LatA),第二点B的经纬度为(LonB,LatB),按照0°经线的基准,东经取经度的正值(Longitude),西经取经度负值(-Longitude),北纬取90-纬度值(90-Latitude),南纬取90+纬度值(90+Latitude),则经过上述处理过后的两点可表示为(LonA′,LatA′)和(LonB′,LatB′),则两点距离为
D=R×(arccosΔ)×π/180 ,
(1)
式中:
Δ=sin(LatA′)×sin(LatB′)×cos(LonA′
-LonB′)+cos(LatA′)×cos(LatB′).
由式(1)分别求出每个基点n次试验定位的测量误差,其中第m个基点第j次定位的误差记为Dmj,第m个基点测试标准差记为Sm.则第m个基点的测量误差均值为
…+Dmn)/n.
(2)
第m个基点的标准差为

(3)
本文n取10,即在每个基点进行10次试验定位,将在每基点试验定位经纬度信息与基点的真实位置进行记录对比,并根据基点经纬度与试验定位的经纬度求出该基点10次定位的误差,进而求出该基点试验的误差均值与标准偏差。10个基点所得的测试结果如表1所示。
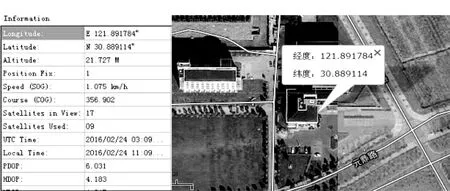
图5 试验定位信息及卫星图
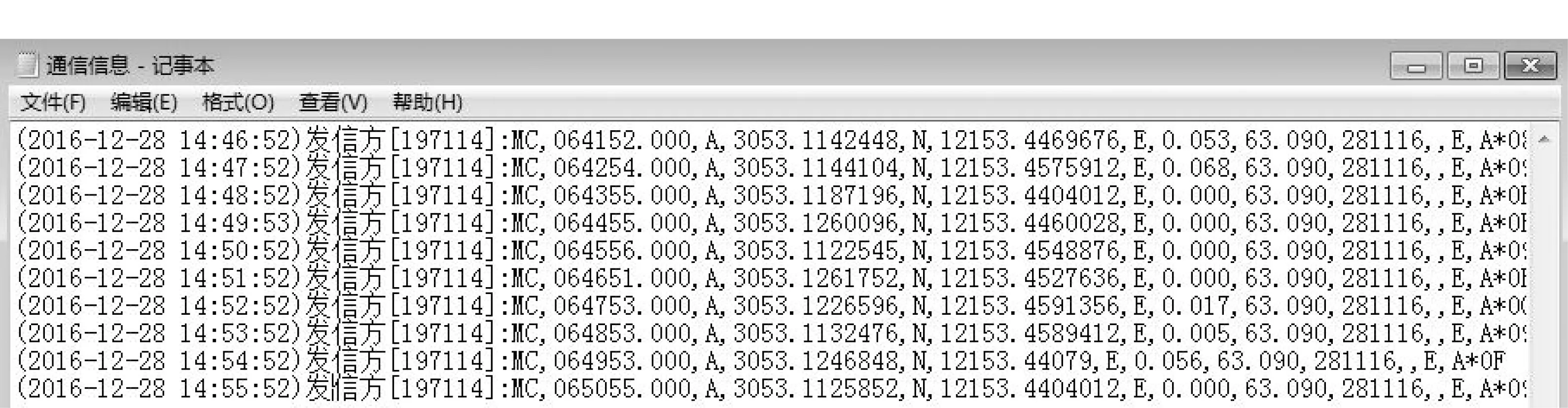
图6 通信接收端记事本文件

表1 定位精度测试结果
根据表1所得的数据得到如图7所示的定位误差均值和定位标准差。

图7 定位误差
由图7可见,定位试验测试误差在10~25 m之间,且在空旷场地试验定位误差相对小,当试验场地有遮挡物时定位误差相对较大。因为定位系统自身的误差及试验环境都会对定位精度产生影响,总的来说系统的定位结果是稳定的,完全能够满足海上装备的定位与通信需求。
3.3海试结果
2016年12月,所设计北斗定位与通信系统随“张謇号”科考母船赴马里亚纳海沟的海洋装备进行万米级海试,所设计的定位与通信系统各项功能良好,在马里亚纳海域定位信息如图8所示。在海试期间,放置于上海海洋大学监控中心的另一套北斗接收模块也接收到了该系统和海试人员所发送的信息,实现了监控中心、科考母船和海洋装备间的北斗卫星通信。
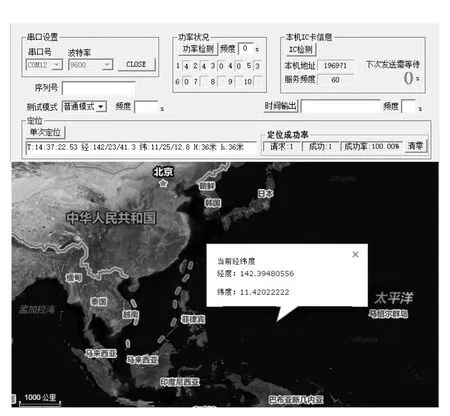
图8 海试定位信息图
4 结束语
本文针对全海深海洋装备定位与通信需求,采用我国自主研发的北斗定位通信模块进行开发,与以往的基于GPS和铱星组合的海上定位通信系统相比,该系统采用我国自主知识产权的北斗卫星系统,通过多传感器组合冗余实现海洋装备作业环境的全天候有效检测,并采用单片机作为主控模块实现定位通信模的开启与关断,保证整个定位与通信系统的低能耗。定位试验测试和海试结果表明所设计的系统能够准确判断全海深装备所处的工作环境、及时完成对装备的位置定位和位置信息发送至母船或监控中心,确保在茫茫大海中能够顺利回收海洋装备,本系统也能够适应其他无线和有线网络不能覆盖,紧靠卫星通信的装置实现定位与通信,具有很强的推广应用价值。
[1] 张宏弢.突破科研瓶颈须助推深海开发[N].中国船舶报,2016-02-26(01).
[2] 赵琳,丁继成,马雪飞.卫星导航原理及应用[M].陕西:西北工业大学出版社,2011.
[3] 成跃进.现代卫星导航定位系统发展介绍[J].空间电子技术,2015(1):17-25.
[4] 郎大勇.基于北斗与GPS的海上导航服务系统[J].舰船科学技术,2015(04):165-168.
[5] 刘晋川.基于北斗卫星定位通信的海上溢油跟踪浮标研究[J].航海技术,2009(02):35-37.
[6] 北京北斗星通导航技术股份有限公司.基于北斗卫星导航系统定位系统的双模船载终端及方法.中国.CN101329180U[P].2008-08-01.
[7] 万常凡.北斗短报文通信及北斗/GPS定位终端.中国CN204334968U[P].2015-01-16.
[8] 王波,陈远知.基于DSP/GPS铱星通信的远程监测系统[J].中国传媒大学报(自然科学版),2007(02):80-84.
[9] HUANG W N,ZHANG Q H,LIAN L G,etal.High altitude long endurance UAV Emergency communication termina based on the SBD capability of Iridium[C]//3rdInternational Conference on Consumer Electronics,Nevada,America,2013.
[10] 杨元喜.北斗卫星导航系统的进展、贡献与挑战[J].测绘学报,2010,39(1):1-6.
[11] 李斌,贾巍,赵奇.基于MSP430单片机的GPS定位系统设计[J].制造业自动化,2010(6):61-63,239.
[12] 关海乐,冯涛,沈兵.基于北斗的海事长报文传输解决方案[J].全球定位系统,2015,40(4):37-40.
[13] 侯智斌,吕曹芳,宗军君.北斗定位通信技术在定向运动中的应用研究[J].现代电子技术,2014(21):38-40.
[14] 高婷.基于北斗定位的海上落水报警装置设计与研究[D].上海:上海海洋大学,2014.
DesignandRealizationofthePositionandCommunicationSystemBasedonBDSforFullOceanDepthEquipment
CHENZhong1,2,GUOWei2,ZHOUYue1,2,WANGBiao2
(1.CollegeofEngineeringScienceandTechnology,ShanghaiOceanUniversity,Shanghai201306,China)(2.EngineeringResearchCenterofHadalScienceandTechnology,Shanghai201306,China)
Based on the dual-mode working pattern of BeiDou satellites, a position and communication system is designed to transmit the geographic location of full ocean depth marine equipment to the mother ship or control center. This paper adopts the radio navigation satellite system (RNSS) model for positioning and the radio determination satellite service (RDSS) model for sending the location or the transmission information to the receiver’s module. Such system uses photosensitive, angle and temperature sensors combination redundancy working mode to achieve all-weather effective detection for marine equipment operating environment, and then controls the sleep and wake modes of the Beidou module, and the switch between RDSS or RNSS mode by single-chip microcomputer. The experiment results of both location test and sea trials in the Mariana trench show that the system proposed in this paper not only has a high success rate of rapid positioning, but also can effectively save power supply and realize the transmission of short-message communicating.
Beidou dual-mode; positioning; short-message communicating; full ocean depth equipment; low energy consumption
10.13442/j.gnss.1008-9268.2017.05.015
TN965, U666
A
1008-9268(2017)05-0074-06
2017-04-19
国家自然科学基金(批准号:51439004); 上海市科委“科技创新行动计划”(编号:16142203200,15DZ1207000); 上海海洋大学博士科研启动基金(编号:A2-0203-17-100312)
联系人: 陈忠 E-mail: 694085217@qq.com
陈忠(1991-),男,硕士研究生,主要主要从事北斗定位与通信系统的研究。
郭威(1971-),男,研究员,硕士生导师,主要从事潜水器控制系统总体及相关控制技术研究。
周悦(1970-),女,教授,硕士生导师,主要从事海洋工程装备研究。
王彪(1986-),男,讲师,博士,主要从事水下机器人控制系统设计、水下作业工具控制系统研究、嵌入式系统开发及应用。
