PPP/INS组合系统研究进展与展望
2017-11-24王浩源孙付平肖凯
王浩源,孙付平,肖凯
(1.信息工程大学 导航与空天目标工程学院,河南 郑州 450001; 2.北斗导航应用技术协同创新中心,河南 郑州 450001)
PPP/INS组合系统研究进展与展望
王浩源1,2,孙付平1,2,肖凯1,2
(1.信息工程大学 导航与空天目标工程学院,河南 郑州 450001; 2.北斗导航应用技术协同创新中心,河南 郑州 450001)
随着GNSS多系统的建设,精密单点定位(PPP)技术向着实时固定解方向发展,PPP/INS组合系统因无需布设基准站,在导航测绘领域有着广泛应用前景。本文系统总结了GNSS多系统、PPP模糊度固定、INS辅助对PPP/INS组合系统的贡献,以及组合系统在滤波方法、平滑算法、随机模型建立等方面的工作,并展望了PPP/INS组合系统的发展趋势。
精密单点定位;惯性导航系统;组合系统;模糊度固定;滤波
0 引 言
全球卫星导航系统(GNSS)和惯性导航系统(INS)是现代导航定位的两大主要手段,两者融合互补,构成定位、测速、定姿一体化的GNSS/INS组合导航系统[1]。目前,在移动测图系统、航空测量系统等导航测绘领域,普遍使用的是基于载波相位观测值的DGNSS/INS(Difference GNSS)组合系统,具有快速高效获取完整导航参数的优势,工作原理是基于流动站与基准站之间的时空相关性,进行站星间双差消除GNSS观测误差,这就限制了系统的作业范围,同时需布置基准站增加了系统成本和复杂性[2]。
精密单点定位(PPP),使用单台GNSS双频接收机的伪距和载波相位观测量,利用国际GNSS服务组织(IGS)提供的精密轨道和钟差产品,综合考虑各种误差的精确模型改正,进行单点绝对定位的技术。PPP技术集成了标准单点定位和相对定位的优点,具有作业灵活,不受作业距离限制等特点,可应用于大面积航空测量、海上测量以及不易架设基准站的偏远地区[3]。但在城市峡谷、桥梁隧道等遮挡环境下,可见卫星的数量不能满足定位要求,同时模糊度参数的初始收敛或信号中断后的重新收敛时间较长,PPP定位的可靠性和稳定性受限。
PPP/INS组合系统可以有效弥补上述不足,一方面PPP可以克服DGNSS需要布设基准站的不足,摆脱基准站对作业范围的限制,进一步拓展应用场景;另一方面INS可以克服PPP重新收敛时间较长的不足,充分利用INS短时精度高和导航参数完整的优势,快速高效获取导航测绘信息,在特定场合下能够成为DGNSS/INS组合系统的替代选择。
1 PPP/INS组合系统前期发展
在DGNSS/INS组合系统取得深入研究与广泛应用后,不少学者相继开展了PPP/INS组合系统的研究,表1示出了2010年以前PPP/INS组合系统的研究情况。从定位精度方面来看,PPP/INS组合基本能取得和DGNSS/INS组合相当的精度,因操作灵活,在难以布设基准站接收机的地方能够成为替代选择。PPP/INS组合的解算质量存在差异,与观测环境和数据采集时长有关。当观测环境良好时,PPP/INS松组合和紧组合精度相当;当观测环境较差或出现GNSS信号短期中断时,松组合定位精度将下降,与仅PPP相比基本没有改进,而紧组合依然改善明显,提供更鲁棒的定位结果。在初始收敛段及GNSS信号中断恢复后的重新收敛段,PPP/INS组合系统的定位精度仍不理想,因为在PPP处理中,是把模糊度作为浮点解进行估计,需要一定时间才能收敛到真值[4]。针对后处理应用,当观测时间较长(大于4 h)时,可通过前后向平滑算法来提高收敛段精度,当观测时间较短时,可通过多向滤波处理(即前向,后向,再前向,每次保留已收敛的滤波状态)来改善收敛段的精度[5]。针对实时应用,需要发展适用于PPP的快速模糊度收敛技术。
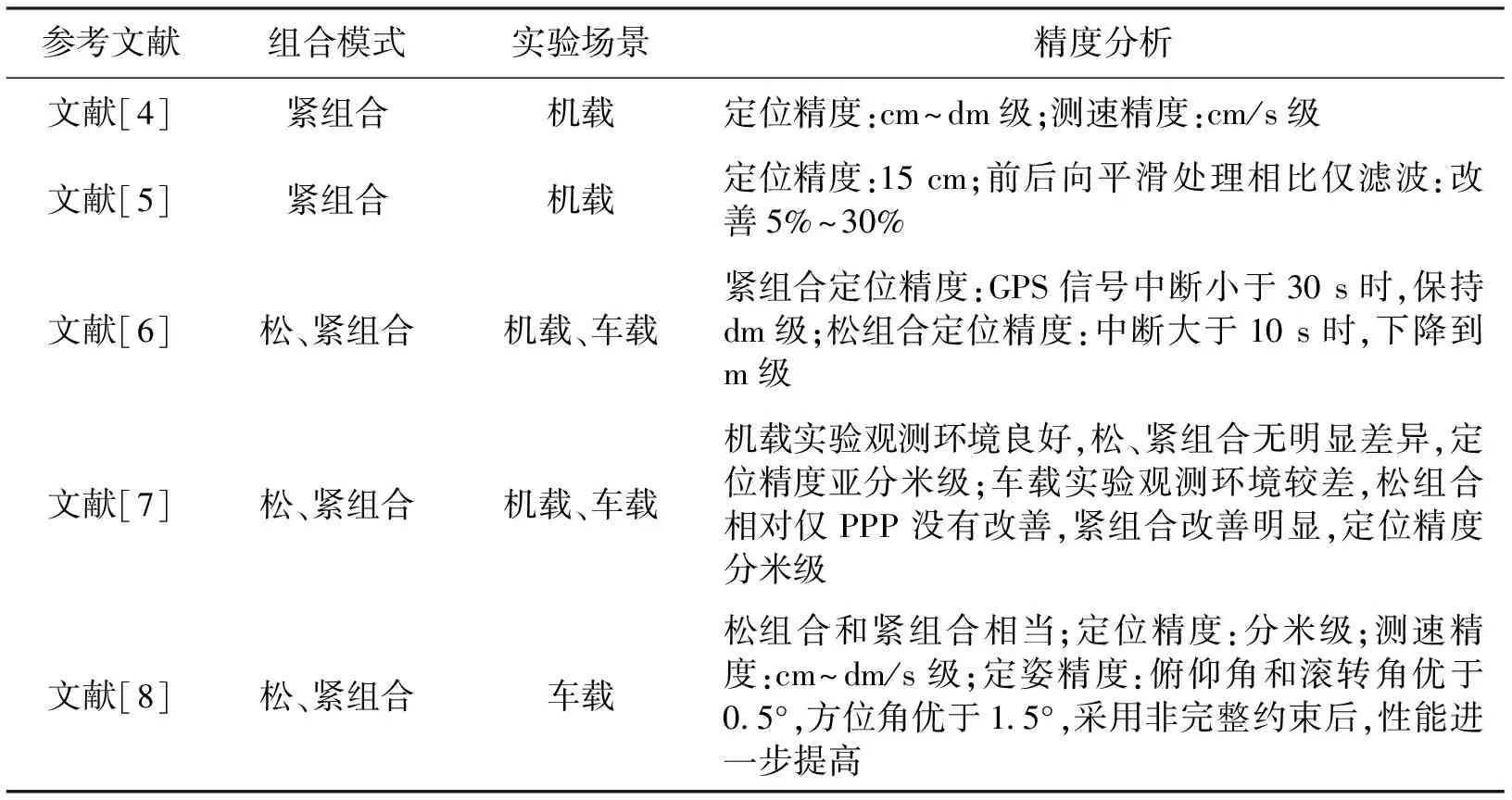
表1 2010年以前PPP/INS组合研究情况
在2010年以前的PPP/INS组合系统的研究中,都是基于GPS单系统和高精度INS的组合,需要良好的观测环境才能取得较理想的精度,同时系统成本较高,限制了其发展与应用。随着GNSS多系统、PPP模糊度固定技术、基于微机电传感器(MEMS)的INS的发展,可用卫星数明显增加、站星间空间几何强度明显改善、模糊度参数的收敛速度明显提高、INS短时精度高的潜力被挖掘,近两年,PPP/INS组合系统再次成为研究热点。
2 PPP/INS组合系统研究进展
2.1GNSS多系统对PPP/INS组合的贡献
PPP/INS组合系统的定位精度主要由PPP决定:一方面受可用卫星数和站星间空间几何构型影响,可通过GNSS多系统有效解决;另一方面受伪距观测质量和载波相位连续性的影响,与用户观测环境有关,难以控制[9]。目前,美国的GPS和俄罗斯的GLONASS具备完整星座,可提供全球覆盖的完全运行能力;中国的BDS从2012底开始为亚太地区提供区域服务,目前正在全球组网;欧盟的GALILEO已完成了在轨验证阶段,在2016年底提供初始服务。目前,超过80颗GNSS卫星在轨运行,在开放条件下可同时使用超过20颗卫星进行定位、导航与授时(PNT)服务,相比之下,单GPS系统仅含32颗卫星,每个历元的可用卫星至多有14颗,通常要更少。文献[10]的研究表明,通过使用GNSS多系统数据,卫星的可用性、空间几何强度及精度衰减因子将明显改善,同时PPP在精度、可用性和连续性方面的性能也将明显提升。文献[11]对三系统(GPS+GLONASS+BDS)PPP和战术级INS紧组合进行了研究,一组机载实验结果显示,相比仅GPS解,多系统PPP不仅使位置时间序列更加稳定,而且提供了更好的定位精度,在北、东、天三个方向上分别提高20%、50%和30%.同时,随着卫星截止高度角从10°增加到35°,多系统PPP/INS组合在水平方向的位置精度几乎没有损失,结果还表明,GNSS多系统数据对PPP/INS组合的速度和姿态精度的影响有限,这主要取决于INS自身性能。文献[12]对三星座(GPS+GLONASS+GALILEO)PPP和基于MEMS的惯性系统的紧组合进行了研究,对GNSS观测量进行了非差和星间单差的无电离层线性组合处理,两组跑车实验结果表明,当GNSS测量更新可用时,可实现厘米到分米级的定位精度,与仅使用GPS相比,GLONASS和GALILEO的加入提高了定位精度,星间单差模式能获得更好的定位精度;在GNSS短时中断期间,定位精度会降到分米级,非差和星间单差模式精度相当。
2.2PPP模糊度固定对PPP/INS组合的贡献
传统的PPP/INS组合都是基于模糊度浮点解,这需要较长的收敛时间,且定位精度不可靠,与DGNSS/INS组合稳定的厘米级定位精度还有差距。PPP模糊度固定技术已被证明可以有效缩短收敛时间和提高定位精度,其关键在于处理观测值中的偏差项,进而恢复模糊度的整数特性,PPP模糊度解算方法主要分为三种,即小数偏差法、整数相位钟法和钟差解耦法。目前,武汉大学提供基于小数偏差法的公开产品(ftp://gnss.sgg.whu.edu.cn/products),法国CNES中心提供基于整数相位钟法的公开产品(ftp://cddis.gsfcnasa.gov/gnss/products),用户可从服务端下载产品用于模糊度固定。文献[13]推导了基于整数相位钟法的模糊度固定解PPP/INS紧组合的观测模型和系统模型,两组跑车实验结果表明,所提出的组合模型在模糊度首次固定后能达到稳定的厘米级定位精度,测速定姿性能也与DGNSS/INS组合相当,相比基于模糊度浮点解的组合,模糊度固定解PPP/INS组合具有更短的收敛时间,在GNSS短时间中断后模糊度能实现快速重新收敛与重新固定。文献[14]也对PPP和基于MEMS的INS紧组合进行了研究,模糊度固定方法基于进行了星间单差处理的整数相位钟法,一组跑车实验结果表明,组合系统可以实现厘米级定位精度,与传统基于模糊度浮点解的PPP相比,统计收敛后的定位精度,在北、东、天三个分量上分别提高19.51%、61.11%和23.53%,通过执行模糊度固定,水平方向尤其是东向定位精度改善明显。
2.3INS辅助对PPP/INS组合的贡献
PPP的连续性和可用性在很大程度上受到观测环境的限制,当可用卫星数低于4颗时,单独PPP无法正常工作,此时集成INS的紧组合系统,依然能进行解算,INS辅助能提高PPP的定位性能,增加系统的鲁棒性。在标准PPP算法中,卡尔曼滤波器的位置预测值由基于伪距计算的单点定位提供,而在PPP/INS紧组合系统中,INS可以为卡尔曼滤波器提供更准确的位置预测值,这将有助于整体导航性能的提升。
由于PPP中的主要观测值是载波相位观测量,通常由于高动态、信号遮挡或低卫星高度角而频繁发生周跳,为了确保导航性能需进行探测和修复。常用的周跳探测方法有电离层残差法、伪距载波相位组合法、多普勒法和TurboEdit法。目前大多数周跳探测方案都是为DGNSS或DGNSS/INS组合系统而设计的,需要至少两台GNSS接收机来实现观测量差分,因此它们不适用于PPP或PPP/INS组合系统。INS具有短时精度高的优势,可通过INS辅助进行周跳探测与修复,替代PPP中模糊度参数的重新初始化。文献[15]通过惯性辅助,联合使用宽巷相位和超宽巷相位组合来探测频率L1和L2上的周跳,由于波长较长,在观测量残余误差较大的情况下,也能提高周跳探测的鲁棒性和效率,分别使用战术级INS和基于MEMS的低成本INS进行实验,两种等级的INS都能以非常高的置信水平探测周跳。文献[16]将惯性信息引入到宽巷相位组合观测量中以避免来自伪距的高噪声和多径影响,构造惯性辅助的决策变量,相比传统的MW组合精度更高,能有效的探测和修复小周跳(从1到6)和大周跳(从10到20)。文献[17]提出联合星间单差相位新息和星间单差电离层残差修复周跳,为避免修复错误,对周跳修复量进行质量控制并设置多重修复准则,实现了瞬时重新收敛并获得了更好的定位效果,并指出当GNSS信号中断时长超出限值时不再进行修复。
3 PPP/INS组合中滤波方法、平滑算法、随机模型
PPP/INS组合系统的关键技术是PPP与INS之间的信息融合,一是组合滤波模型的构建,要符合系统实际特性;二是后处理平滑算法的选取,能有效提高整体导航精度;三是随机模型的建立,要充分考虑观测环境的变化。
PPP/INS组合中常用的参数估计方法是扩展卡尔曼滤波(EKF),它是以误差方差最小为估计准则,基于噪声服从高斯分布的假设,状态模型和观测模型在近似的导航参数处通过一阶泰勒级数展开进行线性化,由于忽略了高阶项,在GNSS信号中断期间,尤其是在使用基于MEMS的惯性系统时,可能导致解的发散。替代方案有无迹卡尔曼滤波(UKF)和粒子滤波(PF)。UKF是一种线性回归估计滤波器,通过非线性状态模型传播加权sigma点来捕获系统的后验均值和协方差估计,但其仍基于高斯分布假设。PF避免了系统模型的线性化,是一种适用于非线性、非高斯系统的非参数估计方法,但由于需要大量的粒子来近似非线性模型,计算成本较高。文献[18]通过融合UKF和PF形成UPF(Unscented Particle Filter)用于PPP/INS组合,可以显著减少所需粒子数,同时保留系统噪声的非高斯特性,通过与EKF、UKF、PF对比,当GNSS观测更新可用时,性能相当,当存在GNSS中断时,UPF可将定位精度提高15%。文献[19]首先证明联邦局部滤波器和自适应滤波器在形式上是等价的,然后基于自适应因子构建联邦滤波器中的信息分配因子,提出的自适应联邦滤波器可以获得与集中式卡尔曼滤波器相当的解算精度,同时通过并行滤波计算提高了解算效率。
在GNSS信号完全中断段,PPP/INS组合进入纯惯导工作模式,导航误差随着时间不断累积;GNSS信号恢复时,模糊度参数也需要较长的收敛时间才能达到真值。在对组合数据进行后处理时,通常使用平滑算法来提高整体导航性能,RTS(Rauch-Tung-Striebel)平滑算法在DGNSS/INS组合中取得了良好的效果,但并不能提高模糊度参数重新收敛段的性能,文献[20]提出将前后向平滑算法应用于PPP/INS紧组合,跑车实验结果表明该算法能够提高GNSS信号完全遮挡段和重新收敛段的导航精度。
观测噪声协方差阵受观测环境影响较大,对滤波器性能更敏感,文献[14]考虑实际观测环境(如多径或不正常观测)的影响,采用改进的Sage-Huge自适应算法构建最优协方差阵,在动态定位中能够改善定位性能。文献[9]为了削弱低质量的GNSS观测量和不准确的状态模型对GNSS多系统PPP/INS紧组合性能的影响,在算法实现中采用基于Helmert方差分量估计的自适应卡尔曼滤波,以削弱观测中不合理的先验协方差并补偿不准确的状态模型,可以使GNSS多系统PPP/INS组合解更鲁棒。
4 PPP/INS组合系统展望
通过总结PPP/INS组合的研究进展,归纳出两大发展趋势:
一是向着实时方向发展,IGS组织实施了RTS(Real-Time Service)和MGEX(Multi-GNSS Experiment)两大项目,旨在全球范围内提供多频多系统的高精度实时PPP服务,PPP朝着实时固定解的方向发展[21]。已有学者证明了非差非组合PPP模型具有更好的定位精度和收敛速度,随着精密产品的改进,同时引入精确的先验电离层约束或对流层约束,可以进一步提高PPP的性能,PPP/INS组合系统也将有着更广阔的发展和应用前景。
二是向着低成本方向发展,随着生产技术的发展,成本更低、性能更好的基于MEMS的INS将会出现;随着GNSS多星座的快速发展,单频用户也能获得很好的连续观测效果;在非极端观测条件下,松组合能获得与紧组合相当的性能,而算法复杂性却大大降低。以上这些都将推动PPP/INS组合走向实用,在消费级应用中也有很大的发展潜力。
随着GNSS多系统的发展,带来更多观测量的同时也带来了更多的状态参数,如系统间偏差、频间偏差等,如何有效估计这些偏差参数并提高解算效率值得深入研究;模糊度固定技术的可靠性还无法保证,有效的质量控制策略也有待进一步发展。
5 结束语
本文系统总结了PPP/INS组合系统的研究进展,介绍了前期的发展情况和近期的研究热点,分别从GNSS多系统、PPP模糊度固定、INS辅助方面总结了三者对PPP/INS组合系统的贡献,从滤波方法、平滑算法、随机模型的建立方面总结了三者对PPP/INS组合系统性能的优化,最后展望了PPP/INS组合系统在实时化和低成本化方向的发展趋势。不久的将来,PPP/INS组合系统有望走向成熟,在导航测绘领域得到更广泛的应用,为国家“综合PNT”体系[22]做出贡献。
[1] 朱锋. PPP/INS组合导航关键技术与算法实现[D]. 武汉:武汉大学, 2015.
[2] 刘帅.模糊度固定解PPP/INS紧组合理论与方法[D]. 郑州:解放军信息工程大学, 2016.
[3] 李盼. GNSS精密单点定位模糊度快速固定技术与方法研究[D]. 武汉:武汉大学, 2016.
[4] ZHANG Y, GAO Y. Integration of INS and un-differenced GPS measurements for precise position and attitude determination[J]. The Journal of Navigation, 2008, 61(1): 87-97.
[5] ROESLER, MARTELL H. Tightly coupled processing of precise point position (PPP) and INS data[C]//Proceedings of the 22nd International Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA. 2009: 1898-1905.
[6] SHIN E H, SCHERZINGER B. Inertially aided precise point positioning[C]//Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2009), 2001: 1892-1897.
[7] KJØRSVIK N S, GJEVESTAD J G O, BRØSTE E,etal. Tightly coupled precise point positioning and inertial navigation systems[C]//International calibration and orientation workshop EuroCOW, 2010.
[8] DU S, GAO Y. Integration of PPP GPS and low cost IMU[C]//Canadian Geomatics Conference 2010. 2010.
[9] GAO Z Z, SHEN W, ZHANG H,etal. Application of Helmert variance component based adaptive Kalman filter in multi-GNSS PPP/INS tightly coupled integration[J]. Remote Sensing, 2016,8(7), 553.doi:10.3390/rs8070553.
[10] LI X X, GE M, DAI X,etal. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo[J]. Journal of Geodesy, 2015 ,89(6): 607-635.
[11] GAO Z Z, SHEN W, ZHANG H,etal. Real-time kinematic positioning of INS tightly aided multi-GNSS ionospheric constrained PPP[J]. Scientific Reports, 2016(6): 30488.doi:1038/step30488.
[12] RABBOU M A, El-Rabbany A. Integration of multi-constellation GNSS precise point positioning and MEMS-based inertial systems using tightly coupled mechanization[J]. Positioning, 2015, 6(4): 81-95.
[13] LIU S, SUN F, ZHANG L,etal. Tight integration of ambiguity-fixed PPP and INS: model description and initial results[J]. GPS Solutions, 2016, 20(1): 39-49.
[14] HAN H, XU T H, WANG J. Tightly coupled integration of GPS ambiguity fixed precise point positioning and MEMS-INS through a troposphere-constrained adaptive kalman filter[J]. Sensors, 2016, 16(7): 1057.doi:10.3390/s16071057.
[15] DU S, GAO Y. Inertial aided cycle slip detection and identification for integrated PPP GPS and INS[J]. Sensors, 2012, 12(11): 14344-14362.
[16] LI Z, GAO J, WANG J. Inertial aided cycle slip detection and repair for PPP/INS tightly coupled navigation[J]. The Journal of Navigation, 2016, 69(6): 1357-1378.
[17] 刘帅,孙付平,张伦东,等. INS辅助周跳修复以实现精密单点定位瞬时重新收敛[J]. 中国惯性技术学报, 2015, 23(5):607-614.
[18] RABBOU M A, El-Rabbany A. Integration of GPS precise point positioning and MEMS-based INS using unscented particle filter[J]. Sensors, 2015, 15(4): 7228-7245.
[19] LI Z, GAO J, WANG J,etal. PPP/INS tightly coupled navigation using adaptive federated filter[J]. GPS Solutions, 2016, 1(21): 137-148.
[20] 刘帅,孙付平,李海峰,等. 前后向平滑算法在精密单点定位/INS紧组合数据后处理中的应用[J]. 中国惯性技术学报, 2015,23(1):85-91.
[21] 柴洪洲,王敏,穆敬,等. 迈向实时位置服务的精密单点定位技术[J]. 海洋测绘, 2013, 33(3):75-78.
[22] 杨元喜. 综合PNT体系及其关键技术[J]. 测绘学报, 2016, 45(5):505-510.
ResearchProgressandProspectofPPP/INSIntegrationSystem
WANGHaoyuan1,2,SUNFuping1,2,XIAOKai1,2
(1.CollegeofNavigationandAerospaceEngineering,InformationEngineeringUniversity,Zhengzhou450001,China;2.BeidouNavigationTechnologyCollaborativeInformationCenter,Zhengzhou450001,China)
With the construction of GNSS multi-system, precise point positioning (PPP) technology is developing in the direction of real-time and ambiguity-fixed solution. The PPP/INS integration system has a wide application prospect in the navigation and surveying field, since the convenience of not laying base station. In this paper, the contributions of GNSS multi-system, PPP ambiguity fixing, INS-aided to the PPP/INS integration system are systematically summarized. And the progresses of filtering method, smoothing algorithm and stochastic model establishment in integration system are generalized. The development trend of the PPP/INS integration system is discussed.
Precise point positioning; inertial navigation system; integration system; ambiguity fixing; filtering
10.13442/j.gnss.1008-9268.2017.05.011
P228.4
A
1008-9268(2017)05-0053-06
2017-07-15
国家自然科学基金(批准号:41674042)
联系人: 王浩源E-mail:2286737444@qq.com
王浩源(1993-),男,安徽阜阳人,硕士研究生,研究方向为精密单点定位与组合导航。
孙付平(1964-),男,河南长葛人,教授,博士生导师,研究方向为大地测量与组合导航。
肖凯(1989-),男,四川泸州人,博士研究生,研究方向为卫星导航与组合导航。
