面向立木检测的二维激光扫描圆弧检测算法
2017-11-17王建利刘晋浩
王建利,刘晋浩
(1.北京工商大学 材料与机械工程学院,北京 100048;2.北京林业大学 工学院,北京 100083)
面向立木检测的二维激光扫描圆弧检测算法
王建利1,刘晋浩2*
(1.北京工商大学 材料与机械工程学院,北京 100048;2.北京林业大学 工学院,北京 100083)
林区环境复杂,导致林用装备在实现自动化、智能化时存在一定的困难,需要采用较为可靠的传感器及技术手段对立木进行识别。但是由于立木树径差异大,现有的检测手段难以准确的检出。为实现林区活立木的检测,可以通过二维激光扫描仪进行数据采集,通过对二维激光数据的滤波、分割和检测等手段将活立木从林区场景中检测到。本文将图像处理中所采用的正切变换圆检测方法引入到二维激光扫描数据处理中,通过分析极坐标特点,推导出极坐标下正切变换公式。将小圆木柱作为幼木,在实验室内搭建幼木仿真环境,使用LMS511 Pro二维激光扫描仪采集仿真场景的二维激光数据,并进行数据处理。试验证明,采用正切变换的方法可以在扫描数据点个数较少时检测出被测目标是否由圆弧组成,并给出了判定系数为0.7,准确率可达90%。
立木;二维激光;圆弧检测;正切变换
0 引言
立木位置信息是林业作业的一个关键信息,可以用于指导采伐、割灌和抚育等林地作业。获得这一信息的手段目前主要以三维图像和激光测量两种手段为主,其中二维激光扫描由于其速度快,距离信息准确,在实际应用中具有广阔的前景[1-5]。立木二维激光扫描测量是快速获取林地中立木位置信息的重要手段,然而林地中除了立木,还包含许多杂物,如繁密的杂草、灌木。这些杂物可能会对立木的识别造成干扰,但立木在形态上与其他杂物有一些区别,主要表现为:立木的横截面(立木与二维激光的扫描平面的截面)形状可以看成近似圆形[6];而其他杂物不存在这样的特征。因此可以利用这一差异来进行立木与林间杂物的区分。二维激光扫描仪在测量时仅能测得截面圆中可视的部分,其余部分由于被立木本身遮挡,而无法测得,因此,二维激光测量立木截面所得结果仅是圆上一部分圆弧。这样,立木的检测转变为二维激光扫描数据中的圆弧检测。
圆弧检测算法在图像处理领域研究较为广泛,所采用的算法种类繁多,但主要可以分为两个大类:①基于霍夫变换的算法;②基于边缘链码的检测算法[7]。这两类方法均能实现对原图像中圆的检测,但是常规的霍夫变换方法(SHT)在圆的三个参数(圆心坐标,半径)均未知时,需要的计算量大,资源需求量大。而边缘链码检测的算法更适合简单背景图像中圆的检测[7]。为了克服霍夫变换在圆检测中的计算量大的问题,许多改进的算法被提出,如Xu L等人在1993年提出的一种随机霍夫变换(RHT)方法[8],该方法随机的从数据中取三个点,通过霍夫变换,求得参数空间下的一个解,再对结果进行累积。RHT方法的计算量相比于SHT方法小,但对于变形厉害的圆形,检测效果较差。此外,张运楚等提出的基于存在概率图的检测方法,能够较为稳定可靠的检测圆形[9],但其计算量大,内存占用较高[10]。
林业中立木测量方面,唐艺介绍了使用三维点云进行材积计算的方法[11],但其并没有给出圆弧检测方面的方法。王建利、王典等提出用差分方法、聚类方法对二维激光扫描中的立木进行提取[12-14],但是其文中所研究的场景相对简单,被测目标距离扫描仪较近,测量数据点足够多,而且并未提出确定被测数据是圆弧的检测算法。圆弧检测算法不同于圆弧拟合,检测算法中首先要根据圆弧的特征确定被测目标是否为圆弧,而圆弧拟合方法是认为被测目标是圆弧,再对被测目标数据进行拟合,两者的前提假设不同。
为了能够更准确的检测立木二维激光扫描数据中的圆弧特征,本文在总结以上研究的基础之上提出一种基于正切变换的圆弧检测算法。
2 正切变换算法原理
正切变换方法可以简单的表述为:将原曲线向正切空间变换,用原曲线线段归一化长度之和作为横坐标,相邻线段的偏转角代数和作为纵坐标。对于二维激光扫描数据,其存储格式为极坐标形式,有两种方法完成正切变换,第一种是先将极坐标向直角坐标变换,再由直角坐标向正切空间变换;第二种是直接由极坐标空间向正切空间变换。从计算时间角度讲,第二种方法更优,因为省去了一次变换的过程,因而计算步骤减少。然而现有的方法中没有极坐标直接向正切空间变换的推导。本研究将极坐标下的正切变换进行了推导,以提高运算效率。

图1 极坐标正切变换原理示意图Fig.1 Tangent transform schematic in polar coordinates

下面对具体变换公式进行推导。设被测目标上有3个测量数据点,分别为A(α1,R1),B(α2,R2),C(α3,R3),如图2所示,OA表示投射到A点的激光束,OB表示投射到B点的激光束,OC表示投射到C点的激光束。过点B分别向OA、OC作垂线,延长AB,记AB延长线与B到OC垂线夹角为ω,BC与B到OC垂线夹角为φ,BC与AB延长线夹角为γ。
观察图2中的两条垂线,由几何知识很容易得知,这两条垂线的夹角为2θ,在此前提下,对极坐标下正切变换进行推导,在此规定:顺时针方向为角度正方向,逆时针方向为角度负方向。
由几何关系可得:
(1)
(2)
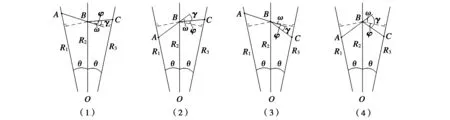
图2 极坐标正切变换讨论Fig.2 Polar tangent transform discussion
(3)
其中T.x表示正切变换后的x轴坐标,相应的T.y表示正切变换后的y轴坐标。
Nguyen等人证明了[15],对于圆弧P,当αi足够小,使得sin(αi)与αi极为相近时,记T(i-1)2Ti1的中点为MpC,则MpC连线近似为直线。因此,通过正切变换可以通过对MpC直线的检测来判断原始曲线P是否为圆弧。
正切变换后中点序列MpC为:
(4)
前面主要介绍了正切变换的原理,此外,二维激光扫描数据由于设备具有系统误差和随机误差,采集到的数据通常需要滤波去噪以及数据分割处理,再进行识别。因此应用正切变换的二维激光扫描数据的圆弧检测算法可以分为以下几个步骤:
(1)将采集得到的激光数据经过滤波器[16]进行滤波去噪,减小噪声对数据的影响。
(2)使用差分法[16]将前景数据分割出来。
(3)对分割出的数据做正切变换,并对正切变换后中点数据进行直线拟合,获得直线拟合决定系数。
(4)将得到的拟合系数与阈值对比,大于阈值,认为目标数据为圆弧,小于阈值,则不是。
3 实验材料及数据显示
为试验所述检测算法的可行性,在实验室环境下搭建实验环境,进行测试。实验中以不同直径的木柱为被检测对象,通过二维激光扫描仪测量实验数据,经过滤波、分割、变换和比较来进行检测。具体实验事项如下所述。
本次实验所选用的二维激光扫描仪为SICK公司生产的LMS511 Pro型二维激光扫描仪,其测量角度最小分辨角为0.166 7°,测距精度为±12 mm,最大扫描距离80 m,最小扫描距离700 mm,最大扫描角度范围190°,扫描频率最高为100 Hz,实验中所用配置为:0.166 7°分辨角,50 Hz扫描频率,80°扫描角范围。
除去扫描仪,数据采集系统还包括一台便携式计算机、锂电池和导线若干。计算机上运行使用Matlab GUI自编的数据采集软件,能够对扫描仪进行常用设置,并每隔1 ms采集一组扫描数据,存储于计算机内存及硬盘上,加上扫描仪扫描时间,两次扫描实际时间间隔为21 ms。试验设备如图3所示。

图3 试验系统示意图Fig.3 Experiment system graph
本测量算法的检测对象为活立木幼木,在实际林地中人种植的幼木有固定的行距和株距,装备在林地的行列之间的空地上行走,在实验室环境下选用直径5 cm的原木柱模拟活立木幼木,将木柱按4所示形式摆放在地板上,用于模拟车载激光扫描仪所观测到的林地环境中的树木。摆放时木柱摆成一个“M”形,扫描仪位于其中轴线上。其中贴近墙面的木柱,其柱面到墙面之间距离为2 cm,两列之间距离为1.4 m。与木柱贴近的墙面用来模拟实际林地中的背景,木柱之间的间距分别表示林间的行距和株距。

图4 木柱摆放方式示意Fig.4 Actual object placement map
图
通过扫描仪扫描所得数据如图5所示,图中左上角视图为整体扫描结果,其余视图由上到下,由左到右分别为场景中的10个小木柱上的二维激光扫描数据分布情况。由图5中可以看出,不同位置的木柱在扫描数据中均有对应的数据簇,但是由于扫描仪测量系统具有系统误差及随机误差,使得测量结果中有些木柱测量点分布不似圆弧,增大了识别的难度。通过滤波和分割[14,16],然后对所分割的数据进行圆弧检测。

图5 扫描数据显示Fig.5 Diagram of scan data of targets in the site
4 结果与分析
传统的霍夫变换算法中若圆的半径未知,在确定圆的参数时需要通过在参数空间内构建圆锥,最后对参数空间中的峰值点进行提取[17]。当数据中含有噪声且数据点较少时,霍夫变换方法无法解决本研究中面临的问题。
正切变换检测结果如图6所示,其中所标识的数值表示分割出的目标经过正切变换后直线拟合系数的分布情况,从图中可以看出,经过分割后的数据中保留了大部分的木柱数据,且仅有少量的背景数据被误分割出来。同时从所标识的直线拟合系数可以看出,分割出的木柱处的数据直线拟合系数一般大于0.70,可以判定为圆弧,而拟合系数小于0.70的数据,判定为非圆弧。图6中一处数据区域拟合系数达到0.625,但与实际摆放的木柱位置对比可知,该位置处并无木柱摆放,出现如此高的拟合系数,可能是由于原始测量数据中出现的数据波动,经过滤波以后使得数据变得更加集中,又因数据点个数较少,才出现此现象。而图6中在(-700,3600)处本应有一个木柱,算法确未检出,而在数据中出现一个向内的凹陷。出现这种情况的原因可能是激光扫描仪与目标距离远,落在其上的激光光斑数量低于3个,导致分割时丢弃,与可能是木柱的反光面无法使反射的激光满足测量的需求,从而被扫描仪判定为无物体,从而呈现空值(超出扫描范围,距离显示为0)。避免这些情况发生的办法就是多次测量,反复判断。
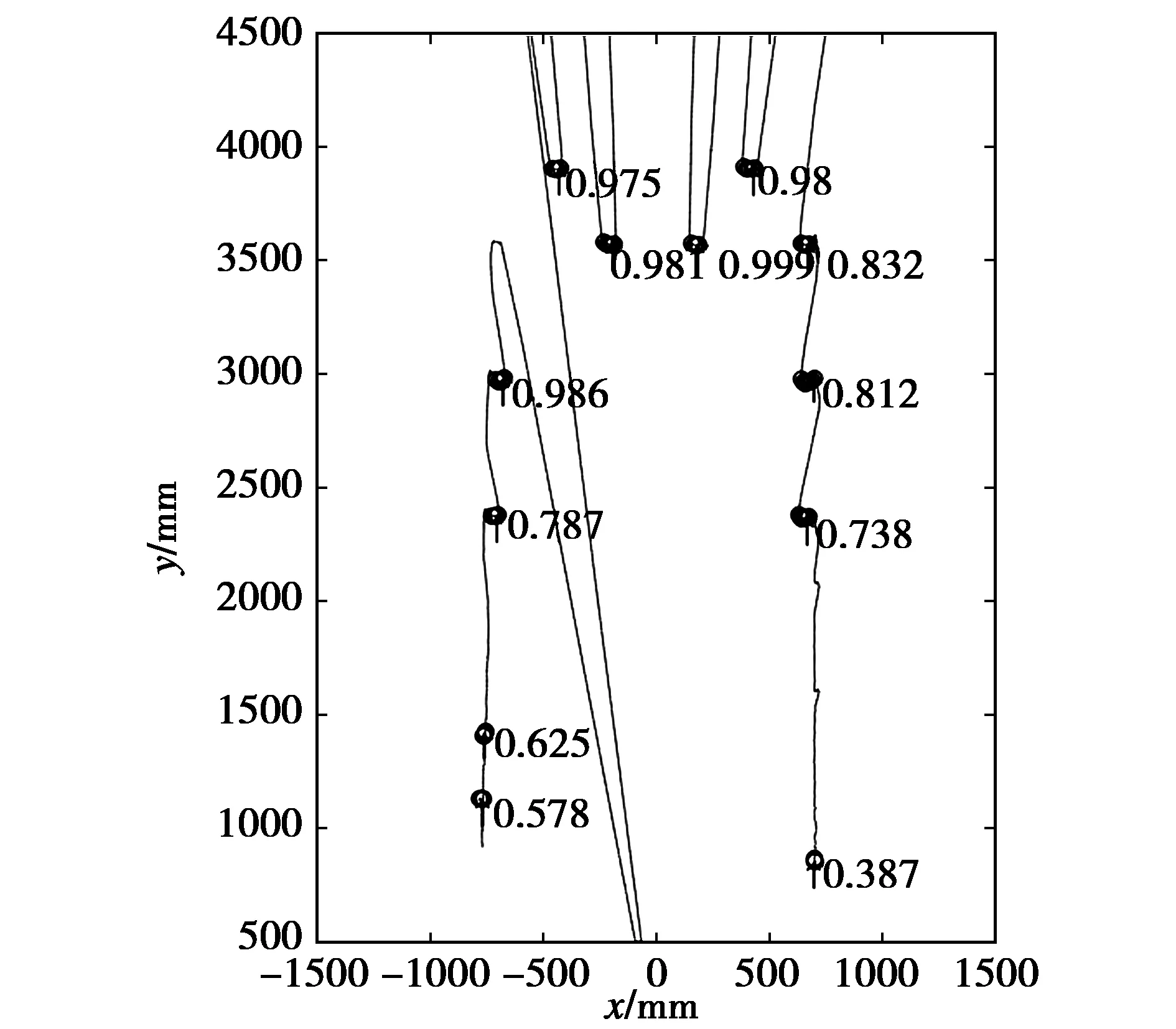
图6 正切变换后直线拟合系数Fig.6 R-square values for linear fitting of the target data after tangent-transformation
通过以上实验与对比,可以得到如下结论:
(1)当输入数据个数较少时,无法使用霍夫变换、圆拟合等方法检测输入数据是否为圆弧。
(2)当输入数据个数较少时,可以使用正切变换法检测输入数据是否为圆弧,并将正切空间下的直线拟合系数作为判定系数,当判定系数大于0.70时判定为圆弧,小于则不是。综合分割算法,最终检测准确率可达90%,十个木柱有九个正确检出。
[1] 薛联凤,云挺,嵇俊,等.基于点云数据的阔叶树叶片重建研究[J].森林工程,2015,31(1):6-11.
[2] 尤号田,邢艳秋,王萌,等.小光斑激光雷达数据估测森林生物量研究进展[J].森林工程,2014,30(3):39-42.
[3] 魏浩翰,何立恒,李杰.基于边缘检测滤波的机载激光雷达点云数据处理[J].森林工程,2013,29(6):17-20.
[4] 吴春峰,陆怀民,郭秀荣,等.利用三维激光扫描系统测量立木材积的方法[J].森林工程,2009,25(3):71-72+76.
[5] 曹军,祝彦杰,王怀宇.论便携式激光测距仪在森林调查作业中应用的可行性[J].森林工程,2004,20(2):11-12.
[6] 王典,王建利,李婷,等.基于光学相似三角形法的立木胸径测量方法:中国,102927921A[P].2013-02-13.
[7] 蔡佳,黄攀峰,张彬.基于梯度的区域生长和距离直方图的快速圆检测方法[J].光学学报,2015,35(3):193-202.
[8] Xu L,Oja E.Randomized hough transform(RHT):basic mechanisms,algorithms,and computational complexities[J].CVGIP:Image understanding,1993,57(2):131-154.
[9] 张运楚,王宏明,梁自泽,等.基于存在概率图的圆检测方法[J].计算机工程与应用,2006,42(29):49-51.
[10] 何冰.基于几何图元识别的工业CT图像自动矢量化研究[D].重庆:重庆大学,2011.
[11] 唐艺.基于三维激光扫描技术的活立木材积测量方法[D].北京:北京林业大学,2012.
[12] 王典,刘晋浩,王建利,等.林间作业环境内采育目标立木间株距的计算[J].湖北农业科学,2012,51(5):1017-1020.
[13] Wang J L,Wang D,Li T,et al.The adaptive calculation on the number of pixels in the parabolic segmentation grids of image for fusion with laser scanning points[J].Journal of Convergence Information Technology,2013,8(8):506-514.
[14] 王典,刘晋浩,王建利.基于系统聚类的林地内采育目标识别与分类[J].农业工程学报,2011,27(12):173-177.
[15] Nguyen T P,Debled-Rennesson I.Arc segmentation in linear time[C] .International Conference on Computer Analysis of Images and Patterns Springer-Verlag,2011:84-92.
[16] 王建利,刘晋浩,王典,等.基于差分计算的林木测量二维点云数据滤波[J].西北林学院学报,2012,27(3):193-196.
[17] 程鹏,朱美琳,耿华.一种基于梯度Hough变换和SVM的圆检测算法[J].计算机与现代化,2013,1(2):22-26.
ArcDetectionAlgorithmof2DLaserScanningDataforStumpageDetection
Wang Jianli1,Liu Jinhao2*
(1.School of Materials Science and Mechanical Engineering,Beijing Technology and Business University,Beijing 100048; 2.School of Technology,Beijing Forestry University,Beijing 100083)
In complex forest environment,forestry equipment has some difficulties in the realization of intelligent automation,which demand robust sensor and technical method to recognize stumpage.However,due to large differences in tree diameter,the existing means of detection is difficult to accurately detect.In order to realize the detection of stumpage in forest,the data acquisition can be carried out by 2D laser scanner.Through the filtering,segmentation and detection of 2D laser data,stumpage can be separated from the forest.In this paper,the tangent transform circle detection method used in image processing is introduced into 2D laser scanning data processing.By analyzing the characteristics of polar coordinates,the tangent transforming formula in polar coordinates is derived.Take some small wooden as young trees and build the seedlings in the laboratory simulation environment.The LMS511 Pro 2D laser scanner is used to collect the 2D laser data of the simulation scene,and then the data are processed.The experiment shows that using the tangent transform can detect the arc-like object in spite of little scanning points,and the coefficient of determination 0.7 is given at the end of this paper,in which the accuracy rate can be up to 90%.
Stumpage;2D laser;arc detection;tangent transform
S 771.8
A
1001-005X(2017)06-0047-05
2017-06-02
北京工商大学青年教师科研启动基金资助项目(QNJJ2016-13)
王建利,讲师,博士。研究方向:二维激光测量,图像测量方法。E-mail:wangjianli@btbu.edu.cn
*通信作者:刘晋浩。教授,博士。研究方向:森林工程装备。E-mail:liujinhao@vip.163.com
王建利,刘晋浩.面向立木检测的二维激光扫描圆弧检测算法[J].森林工程,2017,33(6):47-51.
