GPS在卫星追踪(SST)技术中的应用
2017-11-02陈尹翔
陈尹翔 张 军 刘 翔
(西安电子工程研究所 西安 710100)
GPS在卫星追踪(SST)技术中的应用
陈尹翔 张 军 刘 翔
(西安电子工程研究所 西安 710100)
GPS (Global Positioning System)通过终端接收并处理GPS卫星所发射的无线电磁波信号,从而确定用户接收端(观测站)到轨道卫星的天地距离,从而确定并定位观测站的方位。卫星对卫星的追踪(SST)技术实质是通过高分辨技术来测量两颗GPS卫星间的距离变化,SST技术主要是指高低卫星追踪和低低卫星追踪两类。前一种是高轨道卫星(如GPS卫星、对地静止轨道卫星等)追踪低轨道(LEO)卫星或者空间飞行器,后一种近似为同一低轨道上空的两颗卫星之间的追踪,两颗GPS卫星之间可以距离数百千米。这两种卫星对卫星的跟踪技术都将LEO卫星作为反映地球重力场变化的传感器,利用卫星之间单向或者双向的测距系统,来测定GPS卫星间的相对速度及速度变化率。本文在国内外SST研究基础上,针对目前的相关热点问题,对SST确定的重力场理论与方法进行了系统性学习与研究。
GPS;卫星追踪;高轨卫星;低轨卫星;地球重力场
Abstract: GPS(global positioning system) is used to determine distance between space to ground of user’s receiving terminal (observation station) to orbit satellite by terminal receiving and processing radio electromagnetic wave signal transmitted by GPS satellite so as to determine and position observation station in azimuth. Technological essential of satellite to satellite tracking (SST) is to measure distance variation between two GPS satellites via high resolution technology, mainly referring to kinds of technology like high-low satellite tracking and low-low satellite tracking. The former refers to high orbit satellite (for example GPS satellite, to ground stationary orbit satellite, etc) tracking low orbit satellite (LEO) or aircraft in space; the latter is similar to tracking between two satellites over same low orbit. The distance between two GPS satellites can be up to hundreds of kilometer. These two-kinds of satellite to satellite tracking technology will use LEO satellite as sensor to reflect change of earth gravitational field to survey relative velocity and percentage velocity variation by using one-way or two-way ranging system between two satellites. On basis of study on domestic and oversea SST, aiming at actual correlated hotspot issue, the gravitational field theory and method determined with SST is studied systematically.
Keywords:GPS; SST; high-orbit satellites; low-orbit satellites; earth gravitational field
0 引 言
卫星跟踪卫星技术SST(Satellite-to-Satellite Tracking)的提出主要是为了解决从地面上跟踪卫星的难题。由于传统大地测量卫星为了以最大程度回避大气阻力、地球反射和热辐射压等非保守力对卫星的影响,尽量将卫星置于中、高轨道上,同时要求卫星的形状规则并有较大的质面比,这对于利用星载雷达测高仪测定海面高,然后再研究地球重力场的方法是适合的。但随着人类对深人探测地球的迫切性,科学家们对地球重力场的探索有着越来越高的要求:一方面要求有高分辨且能全球覆盖的地球重力场信息内容,另外对中长波部分的地球重力场的精度也有很高的要求,部分课题需要对中长波部分的重力场因时间变化的信息。但当前最先进的地球重力场模型以低于亚分米级的精度来满足中低轨轨道卫星定轨的基本要求。利用卫星测高标定的海面。需要相应波长的厘米级海洋大地水准面来研究海洋和海流。同时需要建立全球的高程基准需要在50-100km的距离范围内拥有优于精度5cm的大地水准面,而当前大地水准面的精细程度同上述的精度要求差一个数量级。这些目标取决于在全球范围内探测重力场和测定重力场信息的科技发展水平。传统卫星基于重力探测技术的摄动方法,存在着两个物体之间万有引力大小与距离平方成反比这个衰减的问题,如果要提高卫星对地球重力场的精细反应就必须得降低卫星轨道高度。地面跟踪的问题就成为比较突出的问题。
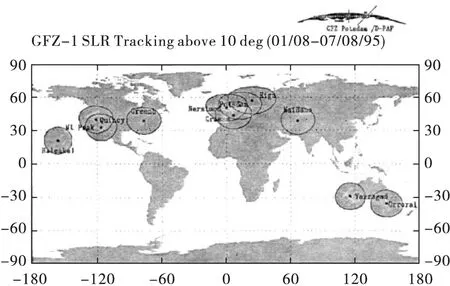
图1 GFZ-1地面跟踪图示
GFZ-1是GFZ为了探测地球重力场发射的一颗低轨道激光卫星。如上图所示:图中的椭圆区域即为GFZ-1的可跟踪范围。虽然该卫星具有与CHAMP相当的轨道高度,但是由于不能进行有效连续的全球跟踪而无法有效的改善重力场模型。其它利用地面跟踪站进行跟踪的卫星轨道也类似,由于存在大量“空隙”地区的重力信息无法直接“观测”到,所以必须多颗卫星综合,同时需要建立大量的、全球均匀覆盖的跟踪站对卫星进行跟踪,并且还要加入Kaula条件等。通过以上的一系列方法来弥补没有星载GPS技术之前,人卫重力测量工作的致命弱点[9]。但是由于地面跟踪自身的难度和跟踪站全球均匀分布的困难以及其他方面的原因,无法解决以上难题。此外,传统的重力测定方法对获得全球均匀分布的重力场信息的能力受到了很大的限制,以至于在有些地区,传统技术可以说是完全无能为力。因此,卫星重力探测方法需要更大的技术及理论突破,为此,在60年代,科技工作者提出了卫星中继系统的概念,即卫星跟踪卫星概念的前身,但是研究的成果距离实用还有一定的距离。直到成本相对较低且具有相当高精度(cm级)的星载GPS精密定轨卫星技术的出现,才使卫星重力梯度测量和卫星跟踪卫星技术实现上述目标的新技术突破。其中,卫星跟踪卫星技术是本文研究的重点。
1 卫星跟踪卫星技术的发展情况
卫星跟踪卫星(SST)技术目前具有两类基本的模式。一类是高轨卫星跟踪低轨卫星的高、低模式(SST-hl),另一类是在相似轨道高度的两颗卫星之间相互连续的跟踪的低-低模式(SST-ll)。这两种模式的联合使用可以派生出另一种模式—混合模式,即高-低卫星跟踪卫星和低一低卫星跟踪卫星融于一个体系(如:G队CE)。特别是以GPS、GLNOASS和Galileo系统为代表的GNSS(Golobal Navigation Satellite System)的出现使得SST-hl已经成为当前SST系统普遍采用的方法。
SST-hl源自Baker于1960年提出的由几颗高轨卫星跟踪一颗低轨卫星以建立相关中继系统轨道数据的设想。之后为了满足阿波罗计划轨道测定的需要,SST-hl被深人研究。1970年,Kuala对SST-hl的概念进行了比较详尽的描述。在20世纪70年代中期,NASA以应用技术卫星(ATS)作为高轨道卫星做了三次(SST-hl)实验:依次跟踪了NIMBUS-5、Apollo-Soyuz气象卫星及GEOS-3对地观测卫星。这几次实验了利用ATS-6卫星跟踪阿波罗(位于轨道高度240km处)的数据,从而获得了南印度洋和大西洋地区的平均精度为7mGal,网格分辨率5°x5°;通过ATS-6卫星对GEOS-3(位于轨道高度800km处)的跟踪数据,改善了非洲、太平洋和大西洋地区的平均重力异常。最新研究证明,通过全球定位系统(GPS)来追踪中、低轨道卫星或者低轨道飞行器,能够在较低成本条件下,明显地提高了地球外部重力场的分辨率和精度。
依据数据处理的方法,SST-hl与地面站跟踪并无本质区别。但是采用SST-hl技术可使跟踪数据的分辨率和覆盖率都有较大幅度的改善,近而在同等精度的要求下,采用SST-h1技术的工程成本较低。而在SST-hl技术基础上改进的SST-ll技术,将以更高的精度和分辨率测定地球重力场及其时变信息。
SST-II的理论可以追溯到1969年由Wolff提出的思想。在1978年,欧洲空间局(ESA)提出了一项为“SLALOM飞行”的计划。在80年代初,美国NASA又展开了 “重力卫星飞行计划”,来后被“重力场研究飞行计划”所替代:要求是通过约六个月在同一圆形极轨道上的两颗低轨道卫星的连续跟踪与测量,以2.5mGal、 100km的空间分辨率和7cm的精度来测定地球重力场以及大地水准面,后来因为“挑战者号”航天飞机失事而延迟了此项计划。而GRM实际上就是已经实施的GRACE任务的前身。
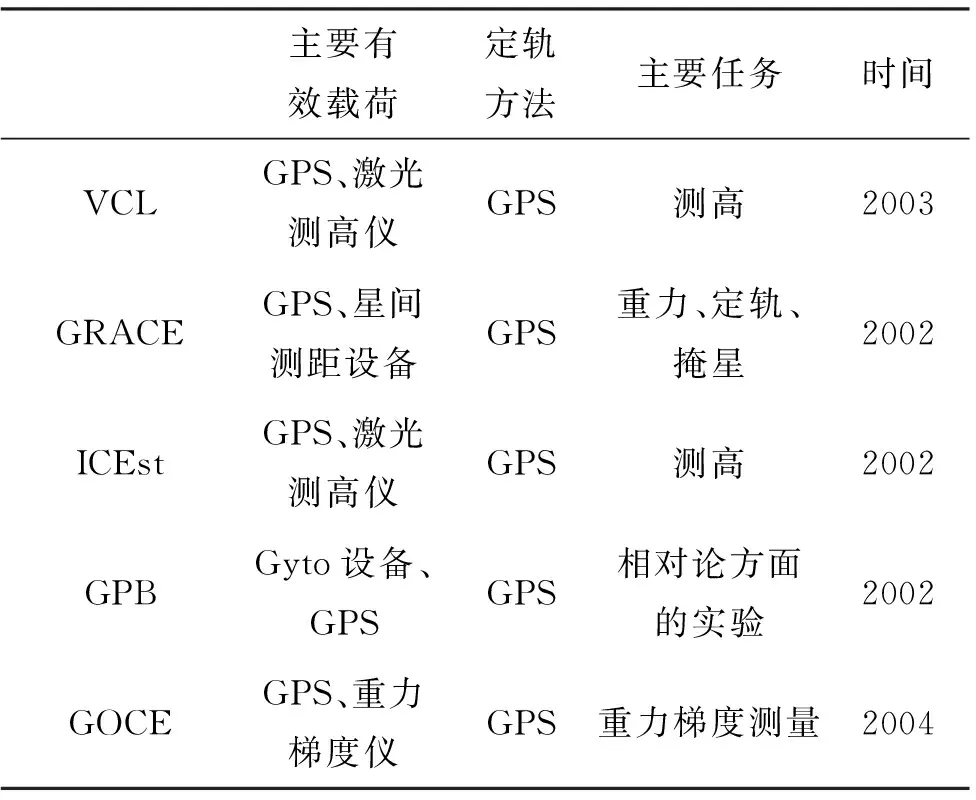
表l 近年利用GPS定轨的低轨卫星
另一方面,卫星跟踪卫星技术的广泛使用是与卫星全球定位系统的发展密不可分的。由于星载GPS技术的出现,在SST技术中对低轨道卫星的连续高精度跟踪就不再是十分困难的事情。其观测方程类似于利用地面对卫星进行观测(如SLR,多普勒,照相观测等)。只不过在协议地面坐标系中,地面跟踪站位置相对固定,而GPS卫星位置不固定(需要GPS卫星精密星历),而如果在惯性坐标系中处理,两者的处理方式则几乎一致。由于GPS的发展以及GLONASS的完善,特别是欧洲Galleon系统的即将实施,我们已经可以获得多元的全球定位信息,使我们有可能以较低的成本获得高精度、高可靠性的定位信息。表1列出了近期使用星载GPS技术的LEO卫星。
经过近几十年年的努力研究,SST技术已趋向成熟且实用。美国宇航局(NASA)和欧洲空间局(ESA)陆续或者即将发射具有测量全球重力场能力的卫星:比如GRACE、CHAMP和GOCE。其中CHAMP是采用SST-hl模式进行地球物理研究的小卫星,已于2000年在俄罗斯Plesetsk卫星发射基地成功进行了发射。该卫星处于近圆极轨道,轨道倾角约为85°,起始轨道高度约为455km,在大部分观测阶段其轨道高度在300km以上,观测阶段末期轨道高度在300km以下,卫星寿命设计为五年。GRACE卫星探测计划是为了探测重力场、磁场和气象实验,它由一对GRACE低轨卫星组成,同时采用SST-hl和SST-h1技术.已于2002年3月18日在俄罗斯的Plesetsk卫星发射基地成功发射。GRACE卫星对在任务的初期将运行于500km的近极圆形轨道,卫星间距离约为200km。GOCE卫星探测计划用来开展重力场和静态洋流探索实验,同时进行卫星重力梯度(SGG)和SST-hl测量技术验证,于2005年发射成功。
这一系列卫星计划将提供高精度和高分辨率的地球重力场信息,从而使全球重力场的研究进入新的阶段。GARCE采用了SST-II和SST-hl技术,而且测定重力场的设备与CHAMP实验的类同,因此就以GRACE为例来讨论SST技术的研究进展,包括系统的关键技术、组成及主要技术参数、卫星行进方案和主要的科学任务。GRACE是美国NASA和德国DLR的联合技术研发项目。该项目于1997年被NASA选为地球系统科学探险者(ESSP)的第二阶段飞行计划。GRACE的主要设施及技术参数:K波段微波测距系统,为GRACE计划的重要技术目标,用来精确检测两卫星间的单程双向距离变化,其距离测量精度约为lum/s。加速度计(ACC) 采用静电悬浮加速度原理来测定大气阻力和太阳辐射压等。CHAMP计划采用微加速度计的预期精度为10-9ms-2,有效频率范围为0.1Hz至2×104Hz。由于GRACE计划卫星的高稳定度的温度控制和低振荡设计,可以使用精度更高的星载微加速度计(Super STAR ACC)。此外,每一GARCE卫星载有三个GPS天线,一个为备用天线,另两个天线分别利用GPS掩星技术获得近地至40km的水汽含量截面,从而改善数值天气预报的准确度和实施精密定轨。
综上,新一代SST计划(包括GRACE、CHAMP和GOCE)的实现将为全球尺度的地学研究做出以下贡献:
a)精密测定全球重力场的细致结构及长波重力场的时间变化;
b)利用地球尺度精密的测量电磁场;
c)测定地球电离层和大气层。
1.1 卫星跟踪卫星确定地球引力场的理论参考系统
卫星跟踪卫星(SST)技术的实施需要参照一系列相关的参考系统。特别是时间系统、坐标系统和力模型系统构成了SST得以实施的基础。具体到SST数据处理时,明晰有关的概念十分必要。而在进行SST-II系统的模拟时,由于没有实测数据,有关的系统和模型更是必不可少。
1.1.1 时间参考系统

表2 SST中使用的几种重要的时间
时间系统和坐标系统是所有空间大地测量技术的基础。在进行精密轨道确定时需要频繁使用以下所述的几个时间系统。首先从定轨的观测系统看,激光测距(SLR),通常使用UTC时间系统,而全球定位系统则使用GPST。尽管它们都是基于国际原子时TAI关于秒定义的标准,但是为了使UTC能更好的与地球自转相协调,需要进行跳秒(Leap Seconds)来保持UTC与UTI之间的差异不超过0.7s,这就使得UTC不是一个连续的时间系统。而GPST则是一个连续的时间系统,它的定义是与UTC在( 0housr,0miunets,0seeonds,January6,1980)时相等。
跳秒通常发生在每年的1月1日0时或7月1日0时。这样我们就可以得到GPST与UTC之间的关系:
GPST=UTC+n
(1)
其中n是自(January 6,1980)的累计跳秒,比如在(January,2002)时n=13sec。
GPST与TAI只有一个常数的差异:
GPST=TAI-19sec
(2)
由于卫星轨道方程是基于Newton力学,所以必须在足够精确的惯性框架中才有效,相应的时间系统也必须是一种特殊的力学时系统。为此使用两种力学时系统来逼近这种时间系统,它们分别是TDT和DTB。这两种时间系统的特点就是抽象,且具有统一时间尺度。由于DTB与TDT的互差不超过2msec。且是一个周期变化项,这也说明DTB不是均匀变化的。所以在通常的人造卫星轨道确定中,对两者并不区分,并使用变化均匀的TDT,统一的用TT(Terrestrials Time)表示这种抽象的时间系统。TT与TAI具有精确的关系:
TT=TAI+32.184sec
(3)
1.1.2 坐标参考系统
与时间系统相对应的是坐标系统。SST观测量(包括卫星的位置、距离等)都需要基于某类坐标参考系统,同时还需要进行坐标参考系之间的转换。比如,表征人造卫星运动的轨道方程必须基于惯性坐标系统。而地球重力场模型、跟踪站坐标由于与地球固联而采用协议地面参考系统(CTS)。实施ssT的卫星需要搭载特定的设备—有效载荷,它们也有自身的观测系统和有关的坐标参考系统:如星载加速度计通过各轴系指向定义的加速度计设备固联坐标系(FIX)。而卫星固联坐标系统(SBF)又是联系相关有效载荷轴系统与惯性坐标参考系统的纽带。此外,卫星轨道坐标系(RTN)也经常被采用。不同的坐标系统并非孤立的,它们之间往往需要进行相互转换,比如重力探测卫星在利用SST技术研究地球重力场时,由于GPS卫星精密星历往往基于CTS,所以得到的LEO卫星的位置也是基于CTS的,当从卫星动力学角度分析LEO卫星的运动时就不可避免的要涉及CIS与CTS系统之间的转换。当涉及CIS与CTS的转换时,还必须设计一系列中间过渡坐标系统。
首先通过图2可以对所涉及的坐标系统有一个总体的认识。然后将结合SST观测量对各个系统作深人的阐述。SST卫星计划的实施中需要由相关有效载荷获取观测量,如星载加速度计观测量、星载GPS观测量(包括掩星观测量),这些观测量都是基于特定的有效载荷坐标系IFX;而IFX与SBF的关系由卫星设计参数决定,于是可以将这些观测里转换到SBF系统下。SBF系统的观测量一方面可以作有效载荷的性能分析,另一方面可通过姿态控制数据转换到CIS。基于CIS的数据则可用于定轨、重力场确定等方面的应用。而初始的地球重力场模型、潮汐模型等都是基于CTS的。在SST的应用时需要对数据进行CIS和CTS之间的相互转换。在CIS和CTS的相互转换过程中还会涉及MDS和TDS等中间过渡坐标参考系统,它们之间的关系也可由图2看出。本文建立了一套基于图2关系的各坐标参考系统相互转换的坐标时间库,可以方便地用于SST的数据处理和模拟研究。
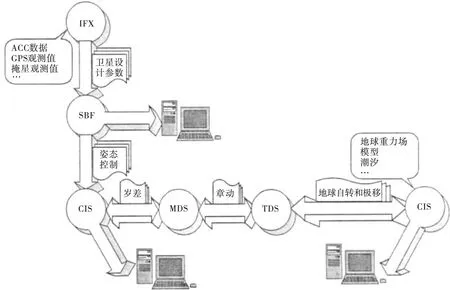
图2 SST涉及的坐标系统
1.1.3 力模型
力模型是影响卫星运动的所有力,经过模型化后的总称。由于中心天体点质量效应的力是卫星运动的主要动力,而该运动可以抽象为二体问题,有严密解。二体问题的解即为Kepler轨道。但是由于其他摄动力的存在,将导致卫星实际运行轨道与Kepler轨道产生偏离,为了研究上的便利,通常摄动力分为非保守力和保守力两种。
保守力对卫星的影响如式(4)。大多数摄动保守力的精确模型如下。
ang=pgeo+pst+pot+prd+pn+pref(4)
其中:
ang卫星上的保守力引起的摄动
pgeo非球形引力场产生的摄动
pst地球固体潮产生的摄动
pot海潮产生的摄动
prd地球自转形变产生的摄动
pn太阳、月亮和其它行星产生的摄动
pref广义相对论产生的摄动
非保守力对卫星的影响如式(5)所示。由于非保守力往往很随机,且受各种因素的影响,所以,非保守力模型往往需要对于不同情况,如卫星外形、材料、质量、运行轨道类型、运行轨道高度等因素建立特殊模型。
ang=pdrag+psolar+pearth+pthermal
(5)
ang附加在卫星上的非保守力摄动
pdrag大气阻力产生的摄动
psolar太阳辐射压产生的摄动
pearth地球反射压产生的摄动
pthermal热量辐射压产生的摄动
2 卫星跟踪卫星确定地球引力场
2.1 卫星跟踪卫星确定地球引力场的实现
经过30多年的不懈努力,以CHAMP(2000)和GRACE(2002)卫星的发射成功为标志,SST技术已经进人具体实施阶段。标准的SST技术满足三个基本准则:
a)卫星的三维状态(位置、速度)可以被连续跟踪;
b)非保守力效应可以被精确测量或补偿;
c)低轨道高度(LEO)。
新一代重力探测卫星CHAMP(SST-hl)、GARCE(SST-II +SST-hl)、GOCE(SOG+SST-hl)通过高精度的星载GPS接收机在任何一个时间内都可以接收到多颗(<4颗)GPS卫星定位数据。另外,通过星载高灵敏度微加速度计比较连续地获得作用在卫星上的非保守力。
此外,意大利也在探讨发射地球重力场探测卫SAGE(Satellite Accelormetry for Gravity field Exploration)计划,我国台湾省也正在加紧高低跟踪模式的重力场探测计划的中华3号卫星(COSMIC)的研制与实施。
2.1.1 高低卫星跟踪卫星模式
具有代表性的SST-hl计划首推由GFZ研发的CHAMP(CHAllenging Minisatellite Payload)卫星计划。CHAMP卫星于2000年7月15日在俄罗斯Plesetsk卫星基地发射升空,并被准确送人预定的近极(i=90°)近圆形(e≈ 0)轨道,轨道高度约为454km〔GFZ,2001〕。CHAMP的星载GPS接收机将连续地获取SST-hl观测量。其优点是明显的:
a)卫星之间可以连续跟踪;
b)避免对流层折射的影响;
c)卫星间的距离变率直接感应到地球重力场的精细部分;
d)卫星可以保持良好的图形结构。
由于CHAMP任务的前瞻性,地学工作者们急切盼望CHAMP任务能够给地学领域带来一次革命;全面地推动地球外部重力场、地球大气层、地球磁场和地球内部相关领域的研究工作。除了CHAMP所执行任务本身的科学意义之外,该计划还为后续探测地球重力场的LEO卫星任务(如:GRACE,GOCE等)进行相对完备的试验,使利用SST确定重力场理论和相关的有效载荷技术等更趋成熟。此外,CHAMP的铺垫作用还表现在所提供的高精度的星载GPS所提供的大气资料,对GARCE,COSMIC等计划实施大气掩星观测提供参考。
2.1.2 低低卫星跟踪卫星模式
主要由GFZ,NASA,CSR,和DLR共同研制的GRACE空间计划于2002年3月升空,标志着GRACE计划已实施。GRACE的空间计划由GRACE卫星对构成,在低低模式卫星跟踪卫星的同时与GPS定位卫星实施高低模式观测。
2.1.2.1 系统组成
GRACE卫星主要包括探测地球重力场的关键有效载荷—KBR、ACC、GPS和相关的辅助有效载荷。在进行SST-II模模式探测地球重力场时,各有效载互相协调工作并达到以下指标:
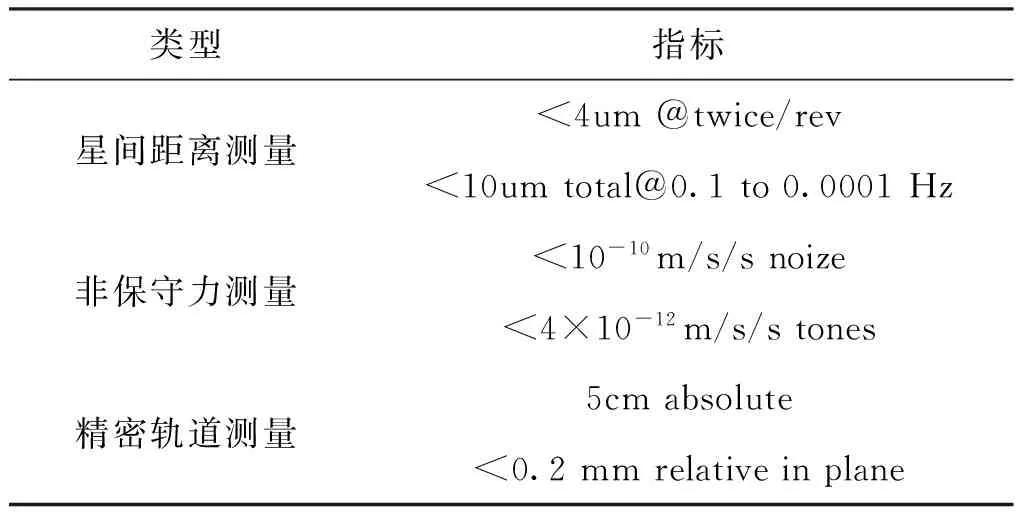
表3 SST观测量误差
2.2.1 星载加速度计(ACC:Accelerometer)
星载加速度计用于测定太阳辐射压、姿态控制和大气阻力时各种推力所引起的非保守力的摄动加速度,采用悬浮静电加速度测量的原理设计。GARCE所载的STAR型加速度计与CHAMP所载的STAR型加速度计属于同一系列。
2.2.2 星载GPS接收机(GPS)
由JPL提供的星载GPS接收机用来精密卫星定轨、轨道控制系统和卫星姿态的实时粗定位。GPS所提供卫星连续的三维状态对于利用SST确定地球重力场十分重要.
2.2.3 激光反射梭镜阵列(LRR:Laser Rert0-Reflector)
GARCE计划采取与CHAMP计划相同的激光反射梭镜阵列,通过反射地面激光跟踪站发出的可见短激光脉冲,实现1~2 cm的精度,来直接测量地面激光跟踪站到LRR的距离。
2.2.4 恒星敏感器(SCA:Star Camera Assembly)
CHAMP和GRACE都采用SCA技术,在卫星轨道和姿态控制系统中用于ACC观测值的正确计算和卫星的精密定向,测定卫星姿态的精度优于0.3mrad,目标为0.lmrad。
2.2.5 日地敏感器(CES:Coarse Earth and Sun Sensor)
GRACE的卫星轨道控制系统和姿态利用CES获取初始数据,而CES提供的定向精度为:卫星Y轴相对太阳的偏航角度不大于15°,卫星Z轴的地球定向的精度优于5°。
3 卫星跟踪卫星计划总体系统构成
SST探测重力场系统的总体构成分为四部分:
a)空间部分;
b)地面监控部分;
c)科学数据管理部分;
d)用户部分。
空间部分主要由一对几乎完全一致的LEO卫星组成,只是为了保证星间双向测距和数据传输以及卫星与地面数据传输的需要,微波频率必须适当的相对移位。卫星对的轨道几乎一样(近地角必须互差一定角度以提高探测地球重力场引力信号的信噪比),相距最大达到300km(250土50km)。地面监控部分则主要由各测控中心组成,这与其他卫星的测控无异。数据管理部分则包括对科学数据的收集和预处理,以及将必要的信息反馈给地面监控部分,以利于对SST空间部分的控制。用户部分则是对数据进行深人分析处理以获得满足不同需要的成果。
3.1 空间部分
SST空间部分主要由精密温度控制系统,精密质心调整系统,通讯系统和相关的测地有效载荷组成。各系统的协调工作必须由相应的星上软件完成。
3.2 地面监控部分
地面监控系统对于SST卫星的健康运行尤为重要,这无异于其他的卫星计划。SST地面监控系统的特殊之处在于需要使用全球分布的GNSS(如GPS)跟踪站,以高采样率、低时间延迟向数据管理中心发送数据。
3.3 科学数据管理部分
SST数据的高效利用必须建立在科学的数据管理系统之上。科学数据管理部分的工作还是联系用户与监控部分的枢纽。数据经地面监控部分接收后传输到数据中心。而这些数据往往是一些未加改正和系统分类的原始数据(如GPS数据、星间测距数据、恒星敏感器数据等)。地面数据处理中心需要按照用途分类,然后对数据进行初步的标定、归算和改正。如星载加速度计往往存在偏差和漂移,需要通过原始观测数据进行星上标定。经过上述处理后的数据产品可以按照不同的数据类型和级别分类向用户发布。
3.4 用户部分
大地测量学、地球物理学、大气科学和海洋学以及一些潜在的用户对SST数据的需求各有不同,有时某些学科方向需要其他学科领域提供更高级别的数据产品。如大气科学希望大地测量学提供高精度的卫星轨道,地球物理和海洋学希望大地测量学提供高精度的地球静态或时变的重力场信息。而并不希望再由数据中心提供的原始数据一步步处理。所以用户间的协调也是必要的。此外,用户还需要向数据中心反馈数据质量和对SST配置的要求,这也需要汇总到数据中心,然后由数据处理中心和地面监控中心联合解决。
4 结论
近三年来SST技术的迅速发展、一系列SST计划的成功实施都是建立在三十年地学工作者的不懈努力之上。本文力图对SST应用于重力场作比较全面和深人的研究,其中具有创新性的研究成果主要有:
a)详细介绍了卫星重力探测技术的发展和应用,包括地面跟踪卫星、卫星测高、卫星跟踪卫星和卫星重力梯度。在此基础上,比较了SST与传统地面重力探测、经典卫星重力方法的特点。综述了SST技术的研究进展,其中星载GPS、星载加速度计ACC和精密星间测距系统KBR等关键技术的引人使得SST可以提供更为可靠的高精度地球重力场信息。
b)比较全面地论述了SST研究中的一些基础性知识,它们是构筑庞大SST系统工程的基础。在力模型的使用过程中为了简化问题,并突出本文的研究重点,所模拟的SST观测量并未考虑非保守力摄动,而纯粹考虑保守力摄动得到,这在一定程度上等价于利用模拟星载加速度计数据扣除这部分影响。
c)阐述了星载加速度计的测量基本原理。
d)阐述了SST-h1的代表计划CHAMP的基本情况。包括卫星基本配置、任务目标,数据产品等方面。
e)阐述具有代表性的SST-ll计划—GRACE。同样包括基本配置和任务目标
由于个人能力相对于这一巨大的系统工程作用有限,所以论文中肯定还有许多有待完善的地方。诚挚地希望得到前辈和同行的指导和建议。
此外,还有许多紧迫的工作急需深人研究:
a)纯粹为满足地球重力场研究的星载加速度计指标并不是很高,而当前所实施的SST计划均对星载加速度计提出了很高的要求,这可能是基于高精度定轨或姿态控制的考虑,具体还需深入研究。
b)SST-ll模拟系统,性能分析系统的进一步完善。
c)利用SST-h1资料恢复地球重力场软件的完善。
d)利用SST-ll资料恢复地球重力场软件的建立。
[1] 边少锋.大地测量边值问题数值解法与地球重力场逼近[D].武汉:武汉测绘科技大学,1992.
[2] 蔡大用,白峰杉.现代科学计算[M].北京:科学出版社,2000.
[3] 管泽霖,李建成.地球形状及外部重力场[M],北京:测绘出版社,1981.
[4] 郭俊义.地球物理学基础. [M]武汉:武汉测绘科技大学出版社,1996.
[5] 何铁春,周世勤.惯性导航加速度计[M].北京:国防工业出版社,1983.
[6] 李征航.空间定位技术及应用[M].武汉:武汉大学讲义,2002.
[7] 刘林.人造地球卫星轨道力学[M],北京:高等教育出版社,1999.
[8] 刘林. 航天器轨道理论[M].北京:国防工业出版社,2000.
[9] 朱圣源,随闯.卫星中立测量及精密定轨[D].武汉:武汉大学,2003.
[10] 肖锋.人造地球卫星轨道摄动理论[M].长沙:国防科技大学出版社,1997.
[11] 赫尔莫特,莫里兹著,宁津生,管泽霖译.高等物理大地测量学[M],北京:测绘出版社,1990.
[12] 王昆杰,王跃虎.卫星大地测量学[M]. 北京:测绘出版社,1990.
[13] 叶世格.GPS非差相对精度单点定位理论与实现[D].武汉:武汉大学,2002.
[14] 张恭庆,林源渠.泛函分析讲义[M].北京:北京大学出版社,2001.
[15] 周耀华.数字信号处理[M].上海:复旦大学出版社,1992.
ApplicationofGPSinSatellitetoSatelliteTracking(SST)Technology
Chen Yinxiang, Zhang Jun, Liu Xiang
(Xi’an Electronic Engineering Research Institute, Xi’an 710100)
TN95.TN967.1
A
1008-8652(2017)02-015-07
2017-04-12
陈尹翔(1989-),男,工程师。研究方向为信号处理技术。
