缸内直喷汽油机轨压控制策略仿真
2017-11-01叶磊黄玉强
叶磊+黄玉强
摘 要:缸内直喷汽油机,即GDI(Gasoline Direct Injection)汽油机,相对于传统PFI(Port Fuel Injection)发动机具有动力性能好,燃油经济性好,低排放等优点,轨压控制是GDI汽油机的控制的重要一环。本文提出了一種前馈控制与PI反馈控制结合的复合控制策略,采用Matlab/Simulink与GT-FUEL联合仿真的方式验证该控制策略的可行性。联合仿真中,进行了轨压阶跃信号跟踪仿真,复合控制策略达到了理想的效果。
关键词:缸内直喷汽油机;联合仿真;轨压;复合控制策略
中图分类号:TP391.9 文献标识码:A 文章编号:1005-2550(2017)05-0008-04
Simulation of Rail Pressure Control strategy for GDI Engine
YE Lei, HUANG Yu-qiang
( Laboratory of Internal Combustion Engine, College of Automotive Engineering, Wuhan University of Technology, Wuhan430070, China )
Abstract: Compared with PFI(Port Fuel Injection) engine, GDI(Gasoline Direct Injection) engine has advantages on dynamic performance, fuel economy performance and emission performance. The control of rail pressure is one of the most crucial parts for GDI engine. A composite control strategy that consists of a feed-forward control strategy and PI close-loop control strategy has been put forward and tested through the co-simulation between Matlab/Simulink and GT-FUEL. In the co-simulation, step signal tracking simulation were conducted and the results reached the expectation.
Key Words: GDI engine; Co-simulation; Rail pressure; Composite control strategy
引 言
随着我国经济水平的不断提高,汽车在普通家庭中逐渐普及,能源和环境问题日益成为人们关注的焦点。缸内直喷汽油汽油机因为具有动力性好,燃油经济性好,低排放等优势,成为各大研究机构的研究热门[1]。
GDI汽油机直接将汽油喷到汽缸内,能够精确控制喷油量和进气量两个方面,从而调节空燃比,具有良好的瞬态响应性能。在低负荷时采用分层燃烧模式,车辆减速时断油减少燃油消耗,其燃油经济性优于传统PFI发动机[2]。因为汽缸内部压力高,GDI汽油机所需喷油压力远大于PFI发动机,所以GDI汽油机油雾颗粒小,雾化程度高,GDI汽油机油雾颗粒达到20um-25um,而PFI发动机油雾颗粒为200um,其可燃混合气形成比PFI发动机更容易[3]。
GDI汽油机的轨压直接影响了喷油器喷油压力,进而影响了发动机性能,因此轨压控制是一个重要的课题。由于台架试验周期长,成本高,仿真成为了发动机管理系统开发不可缺少的一部分,本文采用的复合控制策略由基于MAP的前馈控制策略与具有自整定功能的PI反馈控制策略组成,采用Matlab/Simulink控制器模型与GT-FUEL共轨系统模型联合仿真的方式,验证该控制策略的可行性,仿真试验达到了理想控制效果。
1 高压燃油共轨系统及模型
1.1 GT-SUITE简介
GT-SUITE系列软件是由美国Gamma Technologies 公司开发的汽车仿真分析系列套装软件,能进行发动机,动力系统以及车辆仿真,涵盖了流体、机械、电、磁热和控制等方面。
1.2 高压燃油共轨系统简介
GDI汽油机共轨系统主要由油箱、低压油泵、高压油泵、共轨、轨压传感器、喷油器、ECU电控单元以及管路等。低压油泵与油箱等部分组成了低压油路,高压油泵、高压油轨等部分组成了高压油路,高压油泵连接了低压油路与高压油路两个部分。
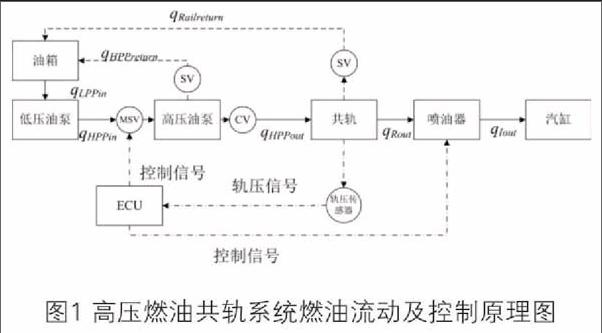
共轨系统燃油流向及控制原理如图1所示。低压油泵将油箱内的汽油泵出,向高压油泵提供0.38-0.62MPa的低压汽油,作为高压油泵汽油来源。汽油经过高压油泵的压力调节电磁阀(MSV),进入高压油泵泵体内部,高压油泵在凸轮带动的活塞挤压下,形成小于20MPa的高压燃油,再经过单向阀(CV)进入到高压油路中,给共轨提供高压燃油。共轨中的燃油通过喷油器喷入汽油机汽缸内实现供油。为了保护共轨系统不受到损伤,高压泵和共轨的安全阀(SV)在轨压大于20MPa时开启,多余的汽油回流到低压油路中,起到泄压的作用。
ECU通过接收轨压传感器采集到的轨压信号,控制压力调节电磁阀(MSV)开启和关闭时间,来调节轨压,形成闭环控制。
1.3 高压燃油共轨系统模型
本文目标发动机为三缸发动机,采用三叶轮式高压油泵。图2所示为高压燃油共轨系统模型。
1.3.1 低压泵模型endprint
低压油泵泵油压力低(0.38-0.62MPa),供油压力小,对高压燃油共轨系统轨压波动的影响小,采用EndEnvironment模块作为低压油泵的简化模型,向高压油泵提供稳定压力的燃油,设置供油压力为0.4MPa。图3所示为低压油泵模型。
1.3.2 高壓泵模型
柱塞式高压油泵由泵体、压力调节电磁阀、柱塞、凸轮、单向阀组成。执行机构为压力调节电磁阀,如图4所示,为高压泵的结构及与工作原理示意图。图5为高压泵柱塞升程图,泵油过程如下:
①进油阶段:当柱塞从上止点下行时,压力调节电磁阀在弹簧作用下保持开启,单向阀保证高压油路中的汽油不会倒流进入高压油泵中,泵体内油压急剧下降,低压油路中的汽油通过进油口进入泵体内。
②回油阶段:柱塞到达下止点之后,开始上行,泵体内油压大于低压油路中的油压时,压力调节电磁阀未关闭,则燃油通过进油口回流到低压油路中。
③供油阶段:在柱塞上行某一时刻,压力调节电磁阀获得一个电磁力,在电磁力的作用下,压力调节电磁阀关闭,泵体内油压急剧上升,当油压大于高压油路油压时,泵内汽油进入高压油路中,实现供油。进入下一个循环后,缸内压力下降,压力调节电磁阀开启,重复以上过程。如图5中供油阶段包含的曲轴转角,称为控制角,记作θ。θ越大,高压泵供油越多,高压油路中油压越高。
图6为GT-FUEL中高压油泵的模型。Orifice Conn为孔连接模块,通过控制其孔径大小模拟压力调节电磁阀的开闭状态,作为压力调节电磁阀的简化模型。OutLetVolume-1模块作为出油孔与高压油路连接,单向阀由图6圈出的三个Mechanical模块组成。SafteyValve-1为安全阀,PlungerLift为凸轮。表1为高压泵参数:
1.3.3 共轨与喷油器模型
高压燃油共轨采用PipeRound和FlowSplitTRight模块串联,构成共轨的主体,FlowSplitTRight模块用于喷油器连接。喷油器采取简化模型,FlowSplitGeneral与PipeRound模块作为喷油器腔体,InjNozzConn模块作为喷油嘴。图1-7所示为共轨与喷油器模型。表2为共轨与喷油器参数。
2 复合控制策略设计
2.1 复合控制策略
本文中采用的复合轨压控制策略由基于MAP的前馈控制策略与具有自整定功能的PI反馈控制策略组成。最常见的控制方式为PI控制,PI控制容易实现,简单,鲁棒性强,但PI控制为“有差控制”,控制量与偏差成正比,不适合控制扰动大的系统[5]。前馈控制则能根据当前工况,及时给出控制量,但开环控制适应性不强,易受干扰。本文中控制策略将两种控制方法的优点结合,达到理想的控制效果。
轨压目标值Ptarget是ECU根据发动机工况查询和计算得到的值,发动机负荷、转速n、发动机温度等方面为决定Ptarget的主要因素。高压燃油共轨系统中,执行机构为高压油泵中的压力调节电磁阀,控制量为压力调节电磁阀控制角θ,θ由前馈控制中的预控角θ0,及反馈控制的θPI两个部分相加得到,即θ = θ0 + θPI。在仿真系统中,Simulink控制器模型将得到的控制角θ 转化为GT-FUEL中压力调节电磁阀控制信号,即可实现对轨压的控制。图8为复合控制原理图。
2.1.1 基于MAP的前馈控制
前馈控制为开环控制,不需要检测被控效果,其自变量为发动机转速n和轨压目标值Ptarget,喷油量Q,根据这三个量在MAP中查询得到预控角θ0,需要进行大量MAP标定仿真试验和反馈参数整定仿真试验。由于工作量的过大,本文仿真忽略了喷油量Q的影响,采用定喷油脉宽进行所有仿真试验。
2.1.2 PI反馈控制
PI反馈控制包括了比例控制与积分控制。其自变量为实际轨压P与目标轨压Ptarget。PI控制中Kp和Ki值需要适应不同的工况,所以PI控制部分要具备自整定的功能。根据实际轨压与目标轨压的差ΔP以及发动机转速n调节Kp与Ki的值,在MAP中查询不同ΔP和n值下的对应的Kp值和Ki值,来满足不同工况的需求。参考模糊PID控制参数整定原则[6],设定的PI控制参数整定原则如下:
①当实际轨压与目标轨压的差|ΔP|较大时,为了跟踪性能更好,增大Kp的值,同时避免超调过大,取较小Ki值。
②当实际轨压与目标轨压的差|ΔP|较小时,为使系统响应超调较小,Kp取较小值,保证响应速度,Ki适当取较大值。
实际发动机轨压控制策略的中需要考虑到喷油量、燃油温度等因素,并对前馈控制的量以及PI控制中的参数进行修正,本文只研究复合控制策略的可行性,所以将其进行了简化。
2.2 MAP标定与参数整定
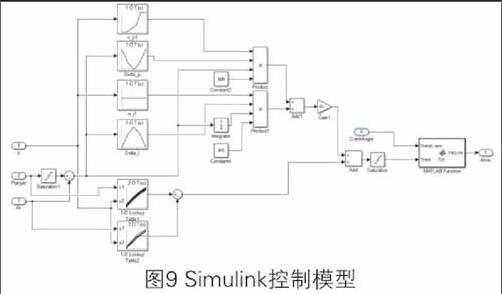
根据2.1节所介绍控制策略,建立如图9所示为控制器模型。对GT-FUEL模型进行控制,需要进行前馈MAP和具有PI反馈控制参数的整定,需要进行Simulink与GT-FUEL的联合仿真。本节简要介绍前馈MAP标定和PI控制的参数整定过程。
2.2.1 联合仿真系统建立
GT-SUITE与Simulink联合仿真的方式有以下两种:
①在Simulink界面中运行GT-SUITE模块;
②将Simulink模型编译为.dll/.so库文件,然后导入到GT-SUITE中进行仿真。
本文采用相对便捷的第一种方式。
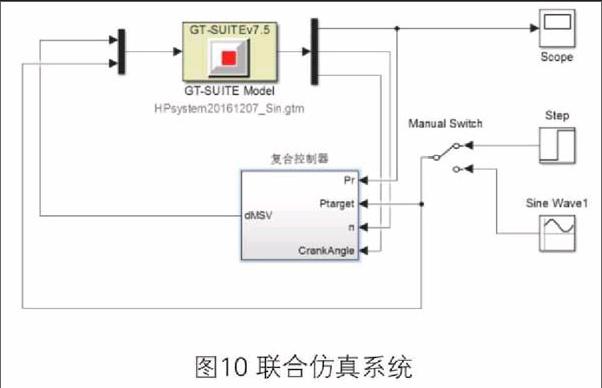
将GT-SUITE根目录下Simulink联合仿真库导入matlab路径中,使GT-SUITE Model模块能够在Simulink中使用。每个采样周期,Simulink会通过GT-SUITE Model模块和SimulinkHarness模块传输数据,控制信号从GT-SUITE Model输入,从SimulinkHarness对应的接口传输到GT-SUITE中。同样的Simulink每个采样周期也会采集SimulinkHarness中的数据,反馈信号从GT-SUITE Model中相应的接口传到Simulink中来,形成闭环控制,从而实现联合仿真。图10所示为Simulink与GT-SUITE联合仿真系统。endprint
2.2.2 前馈MAP的获取过程
本文中MAP的获取采用开环控制的方式进行,MAP的x轴为发动机转速n,y轴为目标轨压Ptarget,z轴为预控角θ0。设定一定转速梯度和目标轨压梯度,两两组合,调节开环控制输入的控制角θ,待开环控制轨压稳定后,设最接近目标轨压的控制角为该工况下的预控角。图11为仿真所获得的前馈MAP。
2.2.3 PI反馈控制的参数整定
PI反馈控制分为两个部分:Kp查询计算部分和Ki查询计算部分。Kp由基比例常数Kpb、Kp转速修正表和Kp偏差修正表相乘得到,同样Ki自整定也由基积分系数Kib、Ki转速修正表和Ki偏差修正表相乘得到。采用常值信号轨压跟踪仿真或正弦信号轨压跟踪仿真进行整定。本文中参数整定方法如下:
①遵循2.1.2节所述自整定原则,根据经验设定Kp和Ki偏差修正表。
②以n=4000rpm为基准,该转速下的转速修正表输出值为1。在n=4000rpm转速下进行基比例系数Kpb和基积分系数Kpi的整定仿真试验。进行多次轨压跟踪仿真,使用Simulink中的Response Optimization工具作为辅助,选取Kpb和Kpi值。
③设定一定转速梯度,在某一转速下,使用前一步骤中的Kpb和Kpi值并乘以一个转速修正系数,进行轨压跟踪仿真,设定控制效果最佳的修正系数为该转速下的修正系数。
④因为有反馈控制的加入,原先的前馈MAP轨压会有一定偏移,故重新进行上一节过程,对原MAP进行修正。
参数整定是一个反复的过程,最终得到了比较合适的PI反馈控制参数。
3 联合仿真试验
本章进行了复合控制策略的阶跃信号轨压跟踪仿真和正弦信号轨压跟踪仿真,在阶跃信号轨压跟踪仿真中设立了纯PI控制对照组,验证复合控制策略的控制效果。
3.1 复合控制策略阶跃信号轨压跟踪仿真
(1)复合控制5MPa阶跃信号轨压跟踪仿真
设定曲轴转速为4000rpm,初始轨压为3MPa,仿真进行2s,目标轨压在1s时从3MPa阶跃到5MPa,仿真步长设为0.001s。图12和图13为5MPa阶跃信号轨压跟踪仿真结果。
仿真中未出现超调。轨压在1.026s,即阶跃开始后0.026s达到相对稳定。t=1.531s时,轨压相对稳定后最低值为4.913MPa。t=1.396s时,轨压相对稳定后最高值为5.083MPa。轨壓波动在±0.09MPa内。
(2)复合控制10MPa阶跃信号轨压跟踪仿真
设定曲轴转速为4000rpm,初始轨压为3MPa,仿真进行2s,目标轨压在1s时从3MPa阶跃到10MPa,仿真步长设为0.001s。图14和图15为10MPa阶跃信号轨压跟踪仿真结果。
t=1.078s时,轨压达到最高值10.27MPa,超调量为2.7%。轨压在约1.09s,即阶跃开始后0.09s到达相对稳定。t=1.452s时,轨压相对稳定后最低值为9.878MPa。t=1.668s时,轨压相对稳定后最高值为10.117MPa。轨压波动在±0.12MPa内。
3.2 纯PI控制策略阶跃信号轨压跟踪仿真
构建纯PI控制器与GT-FUEL共轨模型联合仿真系统,按照本文3.1节中的仿真要求,进行Kp值为80和Kp值为200的纯PI控制阶跃信号轨压跟踪仿真。
(1)Kp为80的纯PI控制阶跃信号轨压跟踪仿真
Kp=80的纯PI控制阶跃信号轨压跟踪仿真试验结果如图16。阶跃开始后,实际轨压未达到目标轨压,t=1.078s时最高轨压为9.965MPa。在t=1.10s 时,即阶跃开始后0.1s到达相对稳定状态。t=1.198s时,轨压相对稳定后最高值为9.874MPa,t=1.182s时,轨压相对稳定后最低值为9.616MPa。轨压平均值为9.745MPa,波动幅度达到±0.129MPa。轨压达到相对稳定状态后,平均轨压有略微上升趋势。
(2)Kp为80的纯PI控制阶跃信号轨压跟踪仿真
纯PI控制阶跃信号轨压跟踪仿真结果如图17所示。Kp=200的仿真中,轨压在1.092s,即阶跃开始后0.092s到达相对稳定。t=1.982s时,轨压相对稳定后最低值为9.60MPa。t=1.128s时,轨压相对稳定后最高值为10.48MPa。波动幅度在±0.48MPa。轨压曲线程锯齿状,超调量大,稳定性差。
3.3 结果分析
比较复合控制策略5MPa和10MPa的阶跃信号仿真结果,10MPa轨压稳定后波动幅度为±0.12MPa,5MPa稳定后波动幅度为±0.09MPa。在喷油脉宽一定的情况下,10MPa轨压工况与5MPa相比,喷油器喷油量更大,另一方面油泵泵油压力和泵油量也有所升高,导致轨压波动更大。所以低轨压工况下,复合控制策略稳压能力更强。
比较Kp=80和Kp=200的纯PI控制策略的仿真结果,Kp=80时,在阶跃开始后0.1s达到相对稳定,相对稳定后轨压波动为±0.129MPa,波动虽小,但无法达到目标轨压,其平均轨压为9.745MPa。Kp=200时能够达到目标轨压,在阶跃开始后0.92s达到稳定,但是波动为±0.48MPa,幅度过大,且轨压波形不稳定。纯PI控制在对轨压进行控制时,需要较大的Kp值才能达到较高的目标轨压。比例控制效果越强,调节速度越快,但容易造成系统不稳定。
比较复合控制策略10MPa和Kp=200的纯PI控制仿真结果。复合控制策略轨压从阶跃开始到达相对稳定,超调量在2.7%内,到达稳定状态时间为0.09s,轨压波动在±0.12MPa。纯PI控制从阶跃开始到达相对稳定,时间需要0.092s,轨压波动在±0.48MPa。由于Kp=200的纯PI控制的比例控制作用强,其到达相对稳定时间与复合控制策略相当,都在0.09s附近,轨压波动远大于复合控制。复合控制策略中,前馈MAP给出精确的预控角,所以控制速度快,由于前馈控制的作用,PI控制所占比重小,所需的Kp的值小,所以轨压超调小且更加稳定[7]。endprint
综上所述,基于MAP的前馈控制与具有自整定功能的PI反馈控制结合的复合控制策略具有良好的轨压跟踪能力,相对于纯PI控制有更好的稳压性能。
4 结论
本文设计了一种复合控制策略,该控制策略由基于MAP的前馈控制部分与具有自整定功能的PI反馈控制部分组成,通过联合仿真试验的方式,对复合控制策略进行了验证。通过进行纯PI控制对比仿真,说明了复合控制策略的优越性。
主要进行了以下工作:
①基于某型1.2TGDI缸内直喷汽油机,建立了高压燃油共轨系统GT-FUEL模型。
②设计了复合控制策略。其中基于MAP的前馈控制策略自变量为发动机转速n、目标轨压Ptarget,PI反馈控制策略自变量为实际轨压P、发动机转速n、目标轨压Ptarget。基于Matlab/ Simulink建立了两种控制方法组成的复合控制器模型。
③構建GT-FUEL与Simulink联合仿真系统,简要说明了前馈MAP标定与PI控制参数整定过程,进行了复合控制策略和纯PI控制策略的阶跃信号跟踪仿真试验,证明了这种复合控制策略具有良好的轨压跟踪性能和稳定轨压能力。
参考文献:
[1]杨世春, 李君, 李德刚. 缸内直喷汽油机技术发展趋势分析[J]. 车用发动机. 2007, 171(5): 8-13.
[2]赵育新, 刘永旭. GDI的发展现状及发展趋势分析[J]. 科技信息. 2009(25): 496.
[3]欣白宇. GDI发动机轨压控制策略研究[D]. 长春: 吉林大学. 2012.
[4]郭帅. GDI发动机共轨系统电磁阀建模与轨压控制[D]. 长春: 吉林大学. 2013.
[5]李娟. 一种基于前馈补偿的PID轨压控制设计方法[J]. 电子科技. 2014, 27(6): 146-149.
[6]窦艳艳, 钱蕾, 冯金龙. 基于Matlab的模糊PID控制系统设计及仿真[J]. 电子科技. 2015, 28(2): 119-122.
[7]仇滔, 雷艳, 彭璟, 等. 高压共轨燃油系统轨压控制策略研究[J]. 内燃机工程. 2013, 34(2): 83-87.endprint
