网链式花生地残膜回收机设计与试验
2017-11-01徐弘博胡志超顾峰玮颜建春
徐弘博,胡志超,吴 峰,顾峰玮,魏 海,颜建春
网链式花生地残膜回收机设计与试验
徐弘博,胡志超※,吴 峰,顾峰玮,魏 海,颜建春
(农业部南京农业机械化研究所,南京,210014)
针对现有花生地残膜回收设备存在的漏膜、回膜、缠膜等问题,设计一种网链式花生地残膜回收机,主要工作部件包括挖掘铲、升运网链、碎土辊、双作用激振装置、集膜装置等,可一次性完成挖掘起膜、输膜、清土和集膜作业。根据升运网链的结构特性,建立其残膜支撑度与土壤通过性的数学模型,通过分析计算验证了网链结构用于残膜输送的优势;设计了可自由浮动的碎土辊,并对其工作压力进行力学分析,得出其结构参数;运用ADAMS软件对双作用激振装置进行仿真,确定其结构尺寸与振动幅度为25 mm;开发了升运角可调的二级升运网链,在完成残膜输送的同时可使黏性土块沿网链滚落,对二级升运网链的有效分离长度和升运角调节范围进行了设计;为实现高效卸膜,设计了液压驱动的集膜装置,并对液压缸参数进行了计算校核。田间试验结果表明,当机具前行速度1.0 m/s、挖掘深度100 mm、一级升运网链线速度2.0 m/s、二级升运网链线速度2.2 m/s、双作用激振装置频率10 Hz时,收膜率为91.5%,含土率为17.2%,能够满足花生地残膜回收需求。研究方法与结果可为相关装备研发提供参考。
塑料薄膜;设计;试验;残膜回收机;网链;分析
0 引 言
地膜覆盖具有保温保墒、改善土壤理化性质、提高土壤肥力等作用,能有效提高农作物产量,在中国得到了广泛应用,近年来中国覆膜种植面积达0.25亿hm2,且覆膜面积仍有持续增加趋势[1-2]。地膜的大量使用在带来增产增收效果的同时,也对农业生产和生态环境造成了严重污染,由于塑料地膜在自然条件下极难降解,又不易回收,导致覆膜农田都遭到不同程度的残膜污染[3-5]。花生是中国典型覆膜种植作物,在山东、河南、河北等花生主产区的地膜平均残留量占地膜残留总量的20%,平均地膜残留强度达32.0 kg/hm2,且残留量还在逐年增加,若不尽快得到有效治理,花生地膜残留强度将很快超过国家农田残膜限值标准[6-7]。
机械化残膜回收是治理残膜污染的重要手段之一,目前针对棉花、玉米、马铃薯等作物的残膜回收设备的研制工作已取得丰富成果[8-12],而花生地残膜回收设备研发起步晚,适用机型相对匮乏[13-16]。链杆式残膜回收机具有作业效率高、结构紧凑、能回收土下残膜、膜土分离能力强等优势,适于多种作物的残膜回收作业[17],但链杆结构在输膜过程中容易出现漏膜、回膜、缠膜等问题,造成机具收膜率降低,且作业顺畅性较差。为提升链杆式输膜部件的作业质量,现有链杆结构常与卷膜辊、鼠笼、风机等装置配合使用[12,18-20],但由于花生地膜较薄,挖掘收获后地膜破损严重,且部分地膜位于地表以下,因此这些装置用于花生地残膜回收的效果并不理想。针对上述问题,在对多种输膜结构进行鉴别的基础上设计一种网链式花生地残膜回收机,以期解决输膜部件漏膜、回膜、缠膜等问题,为花生地残膜回收提供技术手段。研究成果在相似的作业条件下可应用于马铃薯、烟草、玉米等作物收获后的残膜回收作业,具有较好的借鉴意义和广泛的应用前景。
1 设计思路及结构原理
1.1 设计思路与整体结构
花生地残膜主要有以下特点:1)由于地膜过厚将影响花生果针下扎,导致花生减产,因此花生地膜较薄,目前市面上80%以上的花生地膜厚度≤0.008 mm[6];2)花生生长过程中果针下扎导致地膜局部穿孔,造成地膜抗拉强度减弱[21];3)花生属于土下果实,挖掘收获后地膜呈纵向撕裂状态;4)花生收获方式包括人工、夹持铺放、挖掘铺放、半喂入联合收获等,根据花生不同的收获方式,残膜在土壤中的余量和分布状态存在较大区别,地表及土下0~100 mm均有可能残留地膜。
针对上述特征,设计一种网链式花生地残膜回收机,具体结构如图1所示,主要由牵引架、限深辊、挖掘铲、一级升运网链、二级升运网链、侧板、集膜装置、变速箱、地轮等组成。其中,挖掘铲由铲面与栅条组成,一级升运网链主要由主动链轮、从动链轮、托轮、双作用激振装置、网链和碎土辊组成,集膜装置由集膜框与液压缸组成。该机型采用挖掘起膜方式,满足地表及土下0~100 mm残膜回收要求;采用网链结构,保证较薄且破损的花生地膜能够顺畅输送;采用碎土辊、双作用激振装置、前后两级网链组配方式,实现碎土、清土作业。

1.集膜框 2.液压缸 3.二级升运网链传动系统 4.二级升运网链 5.侧板 6.一级升运网链 7.变速箱 8.一级升运网链传动系统 9.牵引架 10.限深辊 11.挖掘铲 12.碎土辊 13.双作用激振装置传动系统 14.机架 15.双作用激振装置 16.地轮
1.2 工作原理
机具传动系统如图2所示,通过三点悬挂方式将牵引架与拖拉机连接,拖拉机后动力输出轴与变速箱连接,变速箱将动力分别传递到一级升运网链动力输入轴和双作用激振装置驱动带轮上,同时一级升运网链动力输入轴将动力传递给二级升运网链动力输入轴,碎土辊通过接触摩擦方式由一级升运网链驱动,集膜装置通过拖拉机液压输出系统驱动。
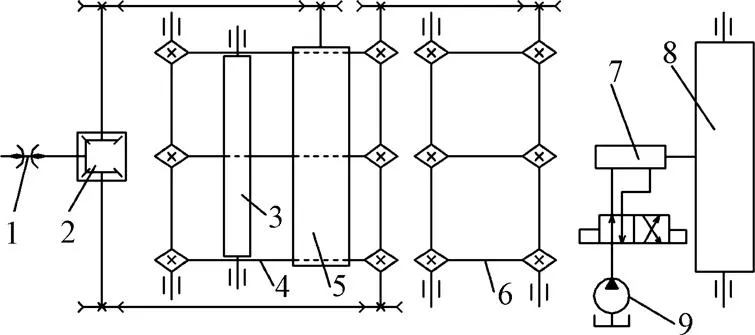
1.传动轴 2.变速箱 3.碎土辊 4.一级升运网链 5.双作用激振装置 6.二级升运网链 7.液压缸 8.集膜框 9.拖拉机液压输出系统
机具作业时,限深辊在滚动限深的同时对地面土壤实现初步碾压碎土,挖掘铲将残膜与土壤混合物同时铲起并沿铲面向上推送,残膜与土壤混合物经过挖掘铲栅条时实现初步清土,然后残膜与土壤混合物进入一级升运网链,在碎土辊碾压、一级升运网链输送和双作用激振装置三重作用下,实现残膜与土壤混合物的碎土和清土,当残膜与土壤混合物输送到一级升运网链尾端时,沙质土壤已基本清理干净,只剩下残膜与少量黏结土块进入二级升运网链,这时二级升运网链采用大倾角重力筛分方式使得土块在自重作用下沿二级升运网链向下滚动,而残膜继续沿二级升运网链向上输送,完成膜土分离,最后,残膜输送至二级升运链尾端并被甩入集膜框中,完成残膜回收作业。卸膜时,液压缸推动集膜框旋转90°,残膜在重力作用下从集膜框中掉落。
1.3 主要技术指标
根据花生覆膜种植模式及残膜回收机作业质量标准NY/T 1227-2006[22],网链式花生地残膜回收机主要技术指标如表1所示。

表1 主要技术指标
2 主要部件设计与分析
2.1 输膜部件设计与分析
2.1.1 网链结构
输膜部件是残膜回收机的主要组成部分,为解决链杆式输膜部件作业时存在的漏膜、回膜、缠膜等问题,从增加输膜部件支撑度的角度出发,筛选并设计出一种网链式输膜结构,主要由链条、串杆和钢丝网组成,实体结构如图3所示。采用这种结构以增大残膜支撑密度,防止残膜输送过程中窜入升运链内侧,从而避免输膜部件漏膜、回膜、缠膜,同时兼具良好的土壤通过性,便于清土。

图3 网链式输膜结构
2.1.2 输膜部件分析
分别从残膜支撑性能和土壤通过性能的角度对网链结构和链杆结构进行对比分析。其中链杆结构仅由链条和串杆组成,网链结构在链杆结构的基础上附加了螺距为、丝距为、丝径为的钢丝网,令两种结构的节距相等,串杆直径均为,网链简化结构如图4所示。

1.钢丝网 2.串杆 3.链条
1.Steel wire mesh 2.String rod 3.Chain
注:h为钢丝网螺距,mm;q为钢丝网丝距,mm;e为钢丝网丝径,mm;p为串杆节距,mm;d为串杆直径,mm;dx为串杆方向的极小位移量,mm;a为任意长度,mm;阴影部分为分析区。
Note: h is screw pitch of steel wire mesh, mm; q is wire interval of steel wire mesh, mm; e is wire diameter of steel wire mesh, mm; p is pitch of string rod, mm; d is diameter of string rod, mm; dx is the minimum displacement in the direction of string rod, mm; a is random length, mm; dash area is the analysis area.
图4 网链简化结构
Fig.4 Simplified structure of network chain


式中为任意长度,mm;为钢丝网丝距,mm;为钢丝网螺距,mm;d为串杆方向的极小位移量,mm;0为分析区内链杆结构杆条总长,mm;1为分析区内网链结构杆条总长,mm。由式(1)可以得出网链结构较链杆结构的残膜支撑度变化率

式中为网链结构相对链杆结构的残膜支撑度变化率,%。


选取节距=101.6 mm,串杆直径=12 mm,网链螺距=60 mm,丝距=50.8 mm,丝径=3 mm的链杆和网链结构带入式(2)、(4)进行计算校核。求解可得残膜支撑度变化率=293.3%,土壤通过性变化率=−13.2%。可以看出网链结构的残膜支撑度较链杆结构明显增加,能够有效防止漏膜、回膜、缠膜等问题;而土壤通过率仅小幅度降低,对清土功能的影响较小,达到了预期设计目的。
2.2 清土部件设计与计算
由于网链式花生地残膜回收机采用挖掘回收作业方式,因此清土能力是影响作业质量的重要指标之一。从3个角度对其清土部件进行设计:首先,在升运网链前端设置碎土辊,将进入升运网链的土壤初步碾压粉碎;其次,在升运网链中部设置双作用激振装置,实现升运网链抖动清土;最后,针对未被一级升运网链清理干净的黏性土块,采用二级升运网链进行筛分。
2.2.1 碎土辊
采用结构如图5所示的碎土辊在升运链前端进行碎土作业,碎土辊由钢管、摇臂和碎土辊支座组成,工作时在网链旋转作用下依靠摩擦力驱动,通过自身重力实现对土壤的碾压粉碎,同时碎土辊可围绕碎土辊支座旋转,即能保持碎土压力基本恒定,又防止喂入量过大时发生壅土和损坏。

1.碎土辊支座 2.摇臂 3.钢管 4.网链 5.托轮
1.Support of soil broken roller 2.Rocker 3.Steel tube 4.Network chain 5.Riding wheel
注:ω1和箭头指向分别为钢管的转速和转动方向;v1和箭头指向分别为网链的线速度和运行方向。
Note: ω1 and arrow point are rotational speed and direction of steel tube; v1 and arrow point are linear velocity and moving direction of network chain.
图5 碎土辊结构示意图
Fig.5 Structure diagram of soil broken roller
对碎土辊的作业状态进行力学分析,计算主要结构参数。如图6所示,当土壤进入碾压区后,压强与土壤压缩程度成正比[23-24]。则有

注:为钢管圆心,为土块与钢管接触点,′为碎土过程中土块与钢管接触点,为钢管与碎土面接触点,、为、′在线段的垂点,为网链升运角,(°);为最大碎土角,rad;为当前碎土角,rad;为钢管半径,m。
Note:is the center of the steel tube,is contact point for cold and steel tube,′ is contact point of clod and steel tube in the process of cold breaking,is contact point of steel tube and upper surface of network chain,andis vertical of the linebyand′,is elevation angle of network chain, (°);is maximum soil broken angle, rad;is current soil broken angle, rad;is radius of steel tube.
图6 碎土压力分析示意图
Fig.6 Sketch map of analysis of soil broken pressure
由式(5)可得

由于碎土辊工作时与土壤滚动摩擦,因此忽略碎土辊沿升运链方向所受摩擦力,即为无侧限挤压,故碎土所需压力

式中P为碎土所需压力,N;d为d所占碎土辊面积,m2;有

将式(6)、(8)带入式(7),可得

对式(9)进行求解可得碎土所需压力P=48.9 N。碎土辊采用长度1.56 m,半径0.084 m,厚度0.005 m的无缝钢管与封盖、轴头焊接而成,重力=350 N,则碎土辊在垂直于升运网链方向的实际碎土压力G=·cos= 303 N,式中为网链升运角,为30°。可以看出实际碎土压力远大于碎土所需压力,因此碎土辊满足碎土要求。
2.2.2 双作用激振装置
如图7所示,双作用激振装置由摇臂、摆杆、偏心套、驱动轴、激振轴、支架和激振轮组成。作业时,动力通过皮带从驱动轴输入,带动支架和激振轮周期性运动,使激振轮推动升运网链抖动,实现膜土分离作业。这种结构可实现激振轮与升运网链之间始终保持接触式滚动摩擦,避免振动敲击,提高零部件的使用寿命。为保证膜土充分抖动分离,要求升运网链振幅不小于20 mm,应用ADAMS软件对该激振装置的振幅进行运动学分析校核[26]。

1.摇臂 2.激振轮 3.激振轴 4.支架 5.偏心套 6.驱动轴 7.摆杆


注:ω和箭头指向分别为双作用激振装置的转速和转动方向;O1为摇臂支点;A1为摇臂铰接点;B1为偏心套位置;C1为偏心套支点;D1为支架铰接点。

图9 支架铰接点D1运动轨迹分析结果
2.2.3 二级升运网链
前期实践发现,对于沙土条件下的花生地残膜回收作业,采用碎土辊和双作用激振装置进行膜土分离效果良好,而土壤条件较差时,集膜箱中存在大量土块,说明在现有结构参数下无法对抗压强度较大的黏性土块实现及时有效的破碎和筛分。为提高机具适应性,在一级升运网链后再配置二级升运网链,二级升运网链的升运角略大于一级升运网链,且升运角可通过调节装置在一定范围内调整,具体结构如图10所示。作业时,残膜和部分土块从一级升运网链末端甩入二级升运网链,由于残膜与网链的静摩擦系数大于土块与网链的滚动摩擦系数,因而残膜可继续沿网链向后输出,而土块则相对于网链向下滚动,最终从二级升运网链前端脱离,实现膜土分离。

1.从动轴 2.纵向调节装置 3.机架 4.土块 5.二级升运网链 6.横向调节装置 7.驱动轴
1.Driven shaft 2.Longitudinal adjustment device 3.Frame 4.Clod 5.Second stage elevator network chain 6.Transverse adjustment device 7.Drive shaft
注:a2为土块加速度,m/s2;v2为二级升运网链线速度,m/s;γ为二级升运网链升运角,(°)。
Note: a2 is accelerated speed of clod, m/s2; v2 is linear velocity of second stage network chain, m/s; γ is elevation angle of second stage network chain, (°).
图10 二级升运网链结构图
Fig.10 Structure diagram of second stage elevator network chain
二级升运网链升运角是影响膜土分离效果的关键参数,要使残膜能够沿升运链上升,而土块沿升运链滚落,则土块必须在二级升运网链上反向加速至超过二级升运网链的线速度,假设土块刚进入二级升运网链时,相对于二级升运网链运动方向的初速度为0,则有

式中2为土块沿网链方向加速度,m/s2;为重力加速度,9.8 m/s2;为二级升运网链升运角,(°);2为二级升运网链线速度,取额定值2.2 m/s;为土块与网链的滚动摩擦系数,取0.1[27];2为二级升运网链有效分离长度,取0.5 m。

2.3 集膜装置设计与校核
2.3.1 集膜装置结构
集膜装置即能起到收集储存残膜的功能,又要便于卸膜,其结构如图11所示,主要由集膜框和液压缸组成,其中,集膜框为四面封闭,两面敞开结构,其中顶面和前面敞开,顶面为正常作业时残膜入口,前面为卸膜时残膜出口。集膜框分别与机架和液压缸铰链连接,液压缸分别与机架和集膜框铰链连接,液压缸由拖拉机液压输出系统驱动。

1.液压缸 2.机架 3.集膜框

2.3.2 液压缸参数设计
集膜装置通过液压缸实现卸膜与复位,为保证卸膜与复位功能良好,对液压缸的尺寸参数与安装位置进行设计计算。


则液压缸行程

式中S为液压缸行程,mm。

注:Gj为集膜框满载重力,N;Fy为液压缸最小推力,N;Lj为集膜框满载重力Gj到支点O2的距离,mm;Ly为液压缸最小推力Fy到支点O2的距离,mm;虚线为集膜框卸膜状态;O2点为集膜框在机架上的安装位置;A2点为液压缸在机架上的安装位置;B2点为收膜状态时液压缸在集膜框上的安装位置;B′点为集膜框卸膜状态时液压缸在集膜框上的安装位置。


根据拖拉机液压系统压力与推力的关系

式中p为液压缸额定压力,取20 MPa;d为液压缸最小内径,mm。可以计算出d=21.5 mm。
在上述校核的基础上,综合考虑液压缸稳定性与驱动速度[28],最终选择液压缸内径为30 mm,外径为50 mm。
3 田间试验与讨论
3.1 试验条件
2016年10月在江苏省南京市六合区收获后的花生地进行网链式花生地残膜回收机收膜试验,试验场景如图13所示。试验地种植模式为单垄双行,垄距800 mm,垄高100 mm,花生收获模式为机具挖掘铺放-人工捡拾,果秧移出后进行收膜作业,土壤类型为沙壤土,含水率约为13%(0~100 mm土深),所覆地膜为厚度0.008 mm、宽度700 mm白膜。机具由约翰迪尔1054拖拉机带动,作业深度设为100 mm,考虑到作业质量与经济效益,机具前行速度定为1.0 m/s,此时一级升运网链线速度1=2.0 m/s,二级升运网链线速度2=2.2 m/s,双作用激振装置振动频率=10 Hz。

a. 作业过程a. Operation processb. 卸膜过程b. Unloading process
3.2 试验方法
在试验地内随机选取10个测试区进行试验,每个测试区长度50 m,宽度1.65 m,先通过五点法测定每个试验区内铺设地膜的总质量[20],试验结束后再将集膜箱内的地膜与土壤分别收集称质量,试验结果取10次试验指标的平均值。将收膜率、含土率作为评价指标,计算方法如下[29-30]:
1)收膜率1
式中1为收膜率,%;1为测试区内集膜箱中地膜质量,g;0为测试区内铺设地膜总质量,g。
2)含土率2

式中2为含土率,%;2为测试区内集膜箱中土壤质量,g。
3.3 试验结果与讨论
网链式花生地残膜回收机收膜试验结果如表2所示。
由试验结果可以得出,网链式花生地残膜回收机平均收膜率为91.5%、含土率为17.2%,能够满足花生收获后的残膜回收作业要求。其网链式输膜结构能够保证顺畅输膜,作业过程中未出现漏膜、回膜、缠膜等问题;限深辊限深可靠,即保证土下0~100 mm残膜全部挖掘,又防止挖掘深度过大而发生壅土问题;碎土辊能够有效实现碾压碎土功能,升运网链上的大土块明显减少;双作用激振装置运行稳定,土壤在网链抖动输送过程中被加速分离;二级升运网链能够实现土块向下滚动的同时残膜继续向后输送,实现了黏性土块的分离工作,同时可对一级升运网链还未清理干净的土壤进行二次清理;液压驱动的集膜框容量大、卸膜方便快捷,保证了机具作业效率。各部件功能与机具作业效果均达到设计预期。
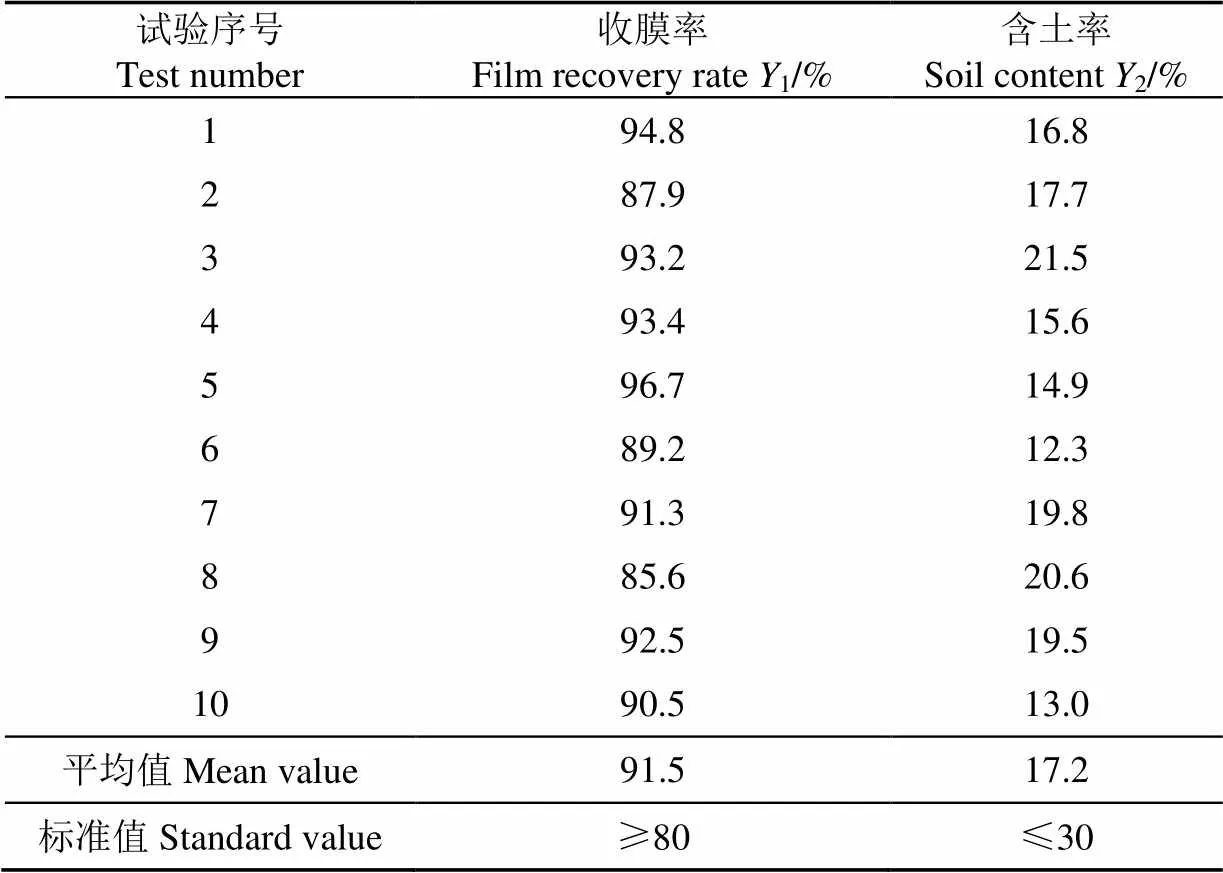
表2 田间试验结果
试验过程中发现,机具前行速度在1.0 m/s左右时,收膜与清土效果都比较理想,当机具前行速度加快时,残膜回收质量依然良好,但集膜箱中土壤明显增多,这是由于拖拉机的发动机转速与后动力输出轴转速是联动关系,当机具前行速度加快时,机具运动部件的转速都将增加,清土时间相应缩短,而影响清土能力的主要参数(网链结构镂空面积、碎土辊碎土压力、双作用激振装置振幅、二级升运网链升运角)均不变,因此机具现有结构与运动参数已不能满足较高工作速度下的清土要求。在今后的设计改进中,需进一步提升机具的清土效率。由于试验设备和时间的限制,本次试验只在现有结构及运动参数下进行了试验,对于机具在不同工作参数下的收膜质量未能开展深入研究,因此在后续试验中将综合考虑一、二级升运网链运行速度对作业效果的影响,得出机具最优参数组合。
在对集膜框中残膜进行检测时,发现有少量杂草与残膜混杂在一起,这是由于机具在收膜作业的同时将地里的杂草一并收集到集膜框中。若花生种植时使用白色地膜又没有打除草剂,则地里容易长出较多杂草,机具在杂草较多的田块中进行收膜作业将会收集大量杂草,使集膜框的利用率降低,影响作业效率,同时含杂率较高的残膜也不利于残膜回收后资源化利用。因此,开发相应的膜杂分离机构将是该机具今后优化提升的一个重点。另外,为提高机具经济适用价值,实现一机多用,在后续改进中将机具的输膜部件和集膜装置设计为可更换结构,通过更换这些工作部件可实现机具回收花生、马铃薯等土下果实的功能。
4 结 论
1)针对链杆式输膜结构在花生地残膜回收作业时存在的漏膜、回膜、缠膜等问题,提出一种网链式输膜结构,对链杆式输膜结构与网链式输膜结构的支撑度和通过性进行分析,说明网链式输膜结构能够有效提升残膜支撑能力,避免输膜过程中发生漏膜、回膜、缠膜等问题,同时保持较好的清土性能。
2)通过碎土辊对进入升运网链的土壤初步碾压粉碎,碎土辊为浮动结构,可保持稳定的碎土压力,且避免拥堵;采用激振频率10 Hz,振幅25 mm的双作用激振装置,实现升运网链输送时抖动清土;采用二级升运网链对未被一级升运网链清理干净的黏性土块与残膜进行筛分,二级升运网链倾角35°~45°可调,可以满足不同作业工况;集膜装置为两面敞开,四面封闭结构,通过液压驱动实现快速卸膜,保障机具的作业效率。
3)对花生收获后的残留地膜进行回收试验,在机具前行速度1.0 m/s、一级升运网链线速度2.0 m/s、二级升运网链线速度2.2 m/s、双作用激振装置频率10 Hz时,收膜率达91.5%,未出现漏膜、回膜、缠膜等问题,含土率为17.2%,清土效果理想,能够满足花生地残膜回收实际作业要求。
[1] 严昌荣,刘恩科,舒帆,等. 我国地膜覆盖和残留污染特点与防控技术[J]. 农业资源与环境学报,2014,31(2):95-102.
Yan Changrong, Liu Enke, Shu Fan, et al. Review of agricultural plastic mulching and its residual pollution and prevention measures in China[J]. Journal of Agricultural Resources and Environment, 2014, 31(2): 95-102. (in Chinese with English abstract)
[2] 严昌荣,何文清,刘恩科,等. 作物地膜覆盖安全期概念和估算方法探讨[J]. 农业工程学报,2015,31(9):1-4.
Yan Changrong, He Wenqing, Liu Enke, et al. Concept and estimation of crop safety period of plastic film mulching[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(9): 1-4. (in Chinese with English abstract)
[3] 何文清,严昌荣,赵彩霞,等. 我国地膜应用污染现状及其防治途径研究[J]. 农业环境科学学报,2009,28(3):533-538.
He Wenqing, Yan Changrong, Zhao Caixia, et al. Study on the pollution by plastic mulch film and its countermeasures in China[J]. Journal of Agro-Environment Science, 2009, 28(3): 533-538. (in Chinese with English abstract)
[4] 王志超,李仙岳,史海滨,等. 农膜残留对土壤水动力参数及土壤结构的影响[J]. 农业机械学报,2015,46(5):101-106,140.
Wang Zhichao, Li Xianyue, Shi Haibin, et al. Effects of residual plastic film on soil hydrodynamic parameters and soil structure[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(5): 101-106, 140. (in Chinese with English abstract)
[5] 李元桥,何文清,严昌荣,等. 点源供水条件下残膜对土壤水分运移的影响[J]. 农业工程学报,2015,31(6):145-149.
Li Yuanqiao, He Wenqing, Yan Changrong, et al. Effect of residual film on soil infiltration under drip irrigation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 145-149. (in Chinese with English abstract)
[6] 张丹,胡万里,刘宏斌,等. 华北地区地膜残留及典型覆膜作物残膜系数[J]. 农业工程学报,2016,32(3):1-5. Zhang Dan, Hu Wanli, Liu Hongbin, et al. Characteristics of residual mulching film and residual coefficient of typical crops in North China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(3): 1-5. (in Chinese with English abstract)
[7] 游兆延,顾峰玮,吴峰,等. 垄作花生残膜回收技术研究[J]. 农机化研究,2016(1):207-211.
You Zhaoyan, Gu Fengwei, Wu Feng, et al. Research on ridged peanut residue plastic film recycling technology[J]. Journal of Agricultural Mechanization Research, 2016(1): 207-211. (in Chinese with English abstract)
[8] 王吉奎,付威,王卫兵,等. SMS-1500 型秸秆粉碎与残膜回收机的设计[J]. 农业工程学报,2011,27(7):168-172.
Wang Jikui, Fu Wei, Wang Weibing, et al. Design of SMS-1500 type straw chopping and plastic film residue collecting machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 168-172. (in Chinese with English abstract)
[9] 杨丽,张东兴,侯书林,等. 玉米苗期地膜回收机结构参数分析与试验[J]. 农业机械学报,2010,41(12):29-34.
Yang Li, Zhang Dongxing, Hou Shulin, et al. Analysis of structural parameters and experiment of plastic film collector for corn fields during seedling period[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12): 29-34. (in Chinese with English abstract)
[10] 吕钊钦,张磊,张广玲,等. 链条导轨式地膜回收机的设计与试验[J]. 农业工程学报,2015,31(18):48-54.
Lü Zhaoqin, Zhang Lei, Zhang Guangling, et al. Design and test of chain guide rail-type plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 48-54. (in Chinese with English abstract)
[11] 王学农,史建新,郭俊先,等. 悬挂式棉秆粉碎还田搂膜机搂膜机构的设计与试验研究[J]. 农业工程学报,2008,24(1):135-140.
Wang Xuenong, Shi Jianxin, Guo Junxian, et al. Experimental study and design on film raking mechanism of hanging film raker with cotton-stalk crushing and returning to field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(1): 135-140. (in Chinese with English abstract)
[12] 戴飞,赵武云,孙伟,等. 马铃薯收获与气力辅助残膜回收联合作业机设计与试验[J]. 农业机械学报,2017,48(1):64-72.
Dai Fei, Zhao Wuyun, Sun Wei, et al. Design and experiment of combined operation machine for potato harvesting and plastic film pneumatic auxiliary collecting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 64-72. (in Chinese with English abstract)
[13] 施丽莉,胡志超,顾峰玮,等. 耙齿式垄作花生残膜回收机设计及参数优化[J]. 农业工程学报,2017,33(2):8-15. Shi Lili, Hu Zhichao, Gu Fengwei, et al. Design and parameter optimization on teeth residue plastic film collector of ridged peanut[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(2): 8-15. (in Chinese with English abstract)
[14] 严伟,胡志超,吴努,等. 铲筛式残膜回收机输膜机构参数优化与试验[J]. 农业工程学报,2017,33(1):17-24.
Yan Wei, Hu Zhichao, Wu Nu, et al. Parameter optimization and experiment for plastic film transport mechanism of shovel screen type plastic film residue collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 17-24. (in Chinese with English abstract)
[15] 徐弘博,胡志超,吴峰,等. 链齿式残膜回收输送方式对比分析与试验[J]. 农机化研究,2017(5):12-20.
Xu Hongbo, Hu Zhichao, Wu Feng, et al. Contrastive analysis and experiment of conveying mode for chain-tooth plastic film residue collector[J]. Journal of Agricultural Mechanization Research, 2017(5): 12-20. (in Chinese with English abstract)
[16] 游兆延,胡志超,吴惠昌,等. 1MGDS-100A型铲筛式残膜回收机的设计与试验[J]. 农业工程学报,2017,33(9):10-18.
You Zhaoyan, Hu Zhichao, Wu Huichang, et al. Design and experiment of 1MCDS-100A typed shovel-sieve residual film recovery machine[J], Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(9): 10-18. (in Chinese with English abstract)
[17] 徐弘博,胡志超,吴峰,等. 残膜回收收膜部件研析[J]. 农机化研究,2016(8):242-249.
Xu Hongbo, Hu Zhichao, Wu Feng, et al. Study on the collecting component of plastic film residue collector[J]. Journal of Agricultural Mechanization Research, 2016(8): 242-249. (in Chinese with English abstract)
[18] 张立新,陈一丁. 1MC型地膜回收起茬机推广使用分析[J].农机科技推广,2006(8):38.
[19] 程兴田,赵建托,潘卫云,等. 两级升运链卷轴式残膜捡拾机的设计与试验[J]. 中国农机化学报,2016(4):31-34.
Cheng Xingtian, Zhao Jiantuo, Pan Weiyun, et al. Design and experiments of two elevator chain reel plastic film collector[J]. Journal of Chinese agricultural mechanization, 2016(4): 31-34. (in Chinese with English abstract)
[20] 戴飞,赵武云,张锋伟,等. 玉米全膜双垄沟残膜回收机作业性能优化与试验[J]. 农业工程学报,2016,32(18):50-60.
Dai Fei, Zhao Wuyun, Zhang Fengwei, et al. Optimization and experiment of operating performance of collector for corn whole plastic film mulching on double ridges[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(18): 50-60. (in Chinese with English abstract)
[21] 张佳喜,王学农,张丽,等. 农田地膜拉伸性能变化对缠绕式回收的影响[J]. 农业工程学报,2015,31(20):41-47.
Zhang Jiaxi, Wang Xuenong, Zhang Li, et al. Effects of mechanical tensile properties of plastic film on plastic recycling method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(20): 41-47. (in Chinese with English abstract)
[22] 中华人民共和国农业部. 残地膜回收机作业质量:NY/T 1227-2006[S]. 北京:中国标准出版社,2016:12.
[23] 张克平,吴劲锋,黄晓鹏,等. 对辊粉碎机理研究进展[J]. 中国农机化学报,2013(1):73-77.
Zhang Keping, Wu Jinfeng, Huang Xiaopeng, et al. Research progress on mechanism of double roller comminution[J]. Journal Chinese Agricultural Mechanization, 2013, 34(1): 73-77. (in Chinese with English abstract)
[24] 甘建国. 高压对辊粉碎的微分剪切理论及数学模型[J]. 机械工程学报,2008(3):241-248.
Gan Jianguo. Differential shear theory and mathematical model of high pressure double roll crush[J]. Chinese journal of mechanical engineering, 2008(3): 241-248. (in Chinese with English abstract)
[25] 李小昱,雷廷武,王为. 土壤抗压强度的试验研究[J]. 农业工程学报,2001,17(5):19-21.
Li Xiaoyu, Lei Tingwu, Wang Wei. Experiment research on unconfined compression strength of soil[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2001, 17(5): 19-21. (in Chinese with English abstract)
[26] 赵武云,史增录,戴飞,等. ADAMS2013基础与应用实例教程[M]. 北京:清华大学出版社,2015.
[27] 余友泰,蒋建鹏. 土壤、作物种实和各种脱出物对钢板、铸铁、和木板等的摩擦系数的测定[J]. 东北农学院学报,1957(1):117-127.
[28] 刘晓明,叶玮. 液压缸结构设计及运行特性分析[J]. 液压气动与密封,2013(7):17-21.
Liu Xiaoming, Ye Wei. Structure design and analysis on operating property of hydraulic cylinder[J]. Hydraulics pneumatics & Seals, 2013(7): 17-21. (in Chinese with English abstract)
[29] 段文献,王吉奎,李阳,等. 夹指链式残膜回收装置的设计及试验[J]. 农业工程学报,2016,32(19):35-42.
Duan Wenxian, Wang Jikui, Li Yang, et al. Design and test of clamping finger-chain type device for recycling agricultural plastic film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 35-42. (in Chinese with English abstract)
[30] 李斌,王吉奎,胡凯,等. 残膜回收机顺向脱膜机理分析与试验[J]. 农业工程学报,2012,28(21):23-28.
Li Bin, Wang Jikui, Hu Kai, et al. Analysis and test of forward film removing mechanism for polythene film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(21): 23-28. (in Chinese with English abstract)
Design and experiment of network chain type residual plastic film collector for peanut field
Xu Hongbo, Hu Zhichao※, Wu Feng, Gu Fengwei, Wei Hai, Yan Jianchun
(,,210014,)
Film-mulching cultivation technique is widely used in China due to its advantage of tremendously increasing the yield of crops. In recent years, the application area of film-mulching cultivation technique has expanded to about 25 million hm2. However, the soil and environment pollution associated with its extensive application becomes an issue which needs to be appropriately considered. As a type of typical film-mulching planting crops in China, peanuts attain the average plastic film residual quantity in the main producing areas to 32.0kg/hm2. In general, the residual quantity increases yearly as the plastic file is difficult to dissolve, resulting in the excess of the farmland film residue limit standard for peanut if no effective treatment being involved. Chain-rod type plastic film residue collector has the feature of high productivity, excellent soil removing ability and can collect the underground plastic film, but when it is used to collect residual plastic film for peanut field, there are plastic film leakage, back and twine problems in the process of conveying. Thus, a network chain type residual plastic film collector for peanut field was designed, which had better work performance in collecting peanut plastic film. According to the design of the critical components of the collector, the structural styles, assembly modes and operation parameters of key working parts, including digging shovel, network chain, soil broken roller, double-acting excitation device and collecting film device, were ascertained respectively. The mathematical models of residual film supporting degree and soil passing ability of chain-rod structure and network chain structure were founded and analyzed respectively. The analysis showed that the network chain structure had a better residual film supporting degree but slightly worse soil passing ability when compared to the chain-rod structure, indicating the conveying advantage of network chain structure. Based on the theoretical working pressure calculation, a soil broken roller with the weight of 350 N was demonstrated to smash the clod effectively. The ADAMS software was used to simulate the motion trail of double-acting excitation device, which showed that the amplitude of the excitation device was 25 mm. In order to sort out sticky clod, the structure of second stage network chain was designed on the basis of elevation angle calculation, which found out that the elevation angle should greater than 35˚. The hydraulic driven box of collecting film was designed and checked, and the results showed that the distance of hydraulic cylinder mounting holes was 630 mm and the inner diameter of hydraulic cylinder was 30 mm. Furthermore, the working quality of network chain type residual plastic film collector for peanut field was conducted by field experiments. The field experiments showed that when the operation speed of the collector was 1.0 m/s, the digging depth was 100 mm, the linear speed of first stage network chain was 2.0 m/s, the linear speed of second stage network chain was 2.2 m/s and the frequency of double-acting excitation device was 10 Hz, the mean plastic film collecting rate was 91.5% and the clod content was 17.2%, which met the requirements of residual plastic film collecting for peanut field. The network chain could convey the residual plastic film smoothly without any film leakage, back and twine problems during the entire process. Also, the clod cleanup structure performed well and the hydraulic driven box of collecting film was able to discharge the film conveniently and efficiently. Therefore, the methods and achievements in this study provide important references for the design and optimization of relevant residual plastic film collectors.
plastic films; design; experiments; residual plastic film collector; network chain; analysis
10.11975/j.issn.1002-6819.2017.17.001
S223.5
A
1002-6819(2017)-17-0001-09
2017-04-17
2017-08-03
公益性行业(农业)科研专项“残膜污染农田综合治理技术方案”(201503105_08);中国农业科学院创新工程土下果实收获机械。
徐弘博,江苏南京人,助理研究员,主要从事农机化装备研发。南京 农业部南京农业机械化研究所,210014。 Email:xhbnjs@163.com
胡志超,陕西蓝田人,研究员,博士,博士生导师,主要从事农业机械化工程及农产品加工技术装备研究。南京 农业部南京农业机械化研究所,210014。Email:nfzhongzi@163.com
猜你喜欢
杂志排行
农业工程学报的其它文章
- 无线遥控步行插秧机的设计与试验
- 差速水稻钵苗Z字形宽窄行移栽机构设计
- Design and evaluation of PID electronic control system for seed meters for maize precision planting
- 玉米花生间作播种施肥一体机研制与试验
- Design and test of semi-feeding test-bed for peanut pod picking
- Relationship between frequency spectrum characteristics and vibration responses of Ginkgo biloba trees during mechanical harvesting operation