基于梯度对称性的无人机影像电力线自动提取方法
2017-10-21李辉芳江万寿周伟才刘丙财
杨 亮,李辉芳,江万寿,谭 波,周伟才,刘丙财
(1.武汉大学 测绘遥感信息工程国家重点实验室, 湖北 武汉 430079;2.深圳供电局有限公司, 广东 深圳 518000)
0 引 言
电力系统的巡检是输电线路维护的重要手段,是电力系统安全稳定运行的重要保障,对于提高应对自然灾害的能力,确保电网安全稳定运行具有重大意义[1]。近年来,国内外有很多利用航拍影像提取电力线的方法与技术[2-10]。然而,在这些算法中,都存在无法有效处理背景线特征,或者电力线提取准确性低的问题。
文献[4]提出一种基于区域增长和Ridge-Based Line Detector的电力线提取方法,然而该方法仅仅适用于背景较为简单的情况[4],缺乏有效的去噪能力,无法甄别筛选电力线线特征,排除非电力线线特征(如杆塔和道路等)的干扰,抗噪性较差;文献[6][9]提出了一种基于ratio-radon和卡尔曼滤波跟踪的电力线提取方法,但是该算法需要影像中电力线方向作为先验知识,只适用于处理所有影像中电力线方向相同的情况[9],然而,在实际应用中,转角塔的存在会使得电力塔两侧的电力线方向发生变化,可靠性差;文献[10]提出一种基于ratio边缘检测算子和Ransac算法的电力线自动提取算法,但是算法在Ransac抽取电力线点,并用这些点拟合二次电力曲线的过程中,舍弃了一组内多个分裂导线,只用一条导线代替多个分裂导线[10],造成提取的电力线数量不完整问题,精度低。在电力线提取的算法中,较为通用的是ratio-radon[6]-[9]算法,其首先利用ratio算法[11]提取电力线像素点,然后利用radon变换算法提取并连接电力线。然而由于radon变换无法得到线段起点终点的位置,因此对于存在杆塔的影像,其电力线的终点取决于影像分块位置,无法得到电力线与杆塔的挂线点,提取的电力线准确性不足。另外文献[6]对于电力线的筛选规则不具有通用性,如电力线的像素宽度大致为一个像素、电力线的方向大致不变,电力线在图像中灰度值通常低于背景灰度、电力线有特定的光谱属性等。
针对航空影像提取电力线出现的抗噪性低、准确性差、可靠性低的问题,本文提出一种基于梯度对称性方法,对LSD提取的线特征进行统计与筛选,自动获得影像中电力线方向并进行筛选;利用梯度对称性方法,检测并定位电力杆塔位置,建立杆塔与杆塔之间缓冲区,缩小电力线检测范围;提出一种缓冲区线段序列化连接方法,提取出准确、完整的电力线。
1 关键技术与流程
1.1 算法流程
本文算法流程框架图如图1所示。

图1 算法技术框架图Fig.1 Algorithm technology framework
1.2 梯度对称性
把图像看成二维离散函数,图像梯度其实就是这个二维离散函数的求导,梯度的方向
在图像灰度最大变化率上,它恰好可以反映出图像边缘上的灰度变化。如图2所示。
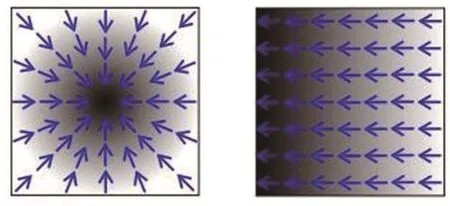
图2 梯度方向Fig.2 Gradient direction
对于一般线特征来说,梯度方向如图2,而对于电力线等宽度只有几个像素的线特征来说,其梯度方向分布如图3所示,即梯度分布具有对称性。本文利用这种梯度分布的对称性来定位图像中电力线在影像中的位置,如图4(图中线段的灰度值是梯度方向值,如0、180)所示;而对于房屋道路边缘或者车道线,梯度不具有对称性或者由于线段过宽破坏了梯度的对称。如图5所示。

图3 梯度对称性Fig.3 Gradient symmetry
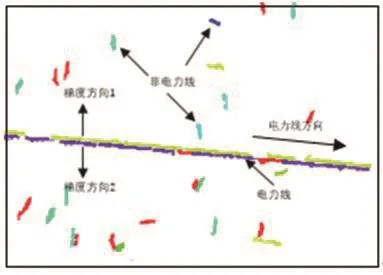
图4 电力线筛选Fig.4 Power lines selection

图5 对称性破坏Fig.5 Breach of symmetry
1.3 利用LSD对影像进行线段提取
LSD[12]是一种直线检测分割算法,它能在线性的时间内得出亚像素级精度的检测结果。
相对于其他线段检测算法,LSD提取的线段具有准确、噪声少等特点。该算法流程为[13]:
1)以s=0.8的尺度对输入图像进行高斯降采样。
2)计算每一个点的梯度值以及梯度方向。
3)根据梯度值对所有点进行伪排序,建立状态列表,所有点设置为“未使用”状态。
4)将梯度值小于一定阈值ρ的点状态表中相应位置设置为“使用”状态。
5)取出列表中梯度最大(伪排列的首位)的点作为种子点(seed),状态列表中设为“使用”状态。
do:
①以种子点为起点,搜索周围“未使用”状态的点并且方向在一定阈值范围内的点,状态改为“使用”状态。
②生成包含所有满足点的矩形R。
③判断同性点密度是否满足阈值,若不满足,截断矩形R变为多个矩形框,直至满足。
④计算NFA(Number of False Alarms),该参数代表在完美噪声图像中不应该检测到目标,该参数值越小,证明提取出的线段越可靠。
⑤改变矩形R使NFA的值更小直至NFA小于一定阈值<=ε,矩阵R加入输出列表。
1.4 电力杆塔识别与电力区域定位
杆塔线特征与电力线有很多相似之处,但是由于杆塔的线特征过宽,其并不具有梯度对称性的特点。为了使杆塔利用梯度对称性检测出来,本算法对提取的线段进行了膨胀处理。
此外,电力塔的最大特征就是塔身的各种方向的缀条相互交错,形成网状结构,因此线与线之间交叉点非常多,且交叉角度随机变化,因此本文算法流程如下:
1)进行LSD线段提取(如图6(1)所示);
2)对提取的线段进行膨胀处理;
3)利用对称性筛选电力线与电力杆塔备选线特征(如图6(2)所示);
4)寻找线特征交叉点(如图6(3)所示);
这个事例说明了延迟满足法的局限性,自控力是内化的能力,就像它的名字一样,是“自己主动去控制”,而我们使用延迟满足法时,其实是用外在力量影响孩子。靠外力实现的自控,短期内有一定效果,但肯定不如孩子主动控制好。
5)对交叉点进行膨胀处理,使得杆塔内交叉点在同一二值区域内;
6)计算并统计影像中二值区域内交叉点的角度;
7)二值区域内角度值个数超过一定数量(重复的角度值被合并)将判定为电力杆塔。
得到电力塔的区域后,可以对电力塔区域进行质心位置计算,对多张影像进行电力塔检测得到多个质心坐标,匹配后即可得到电力塔三维位置。得到电力塔三维位置后即可用三维线段连接各个电力塔的中心位置,并投影到影像上,建立一定宽度的缓冲区,将电力线区域从影像中定位出来。
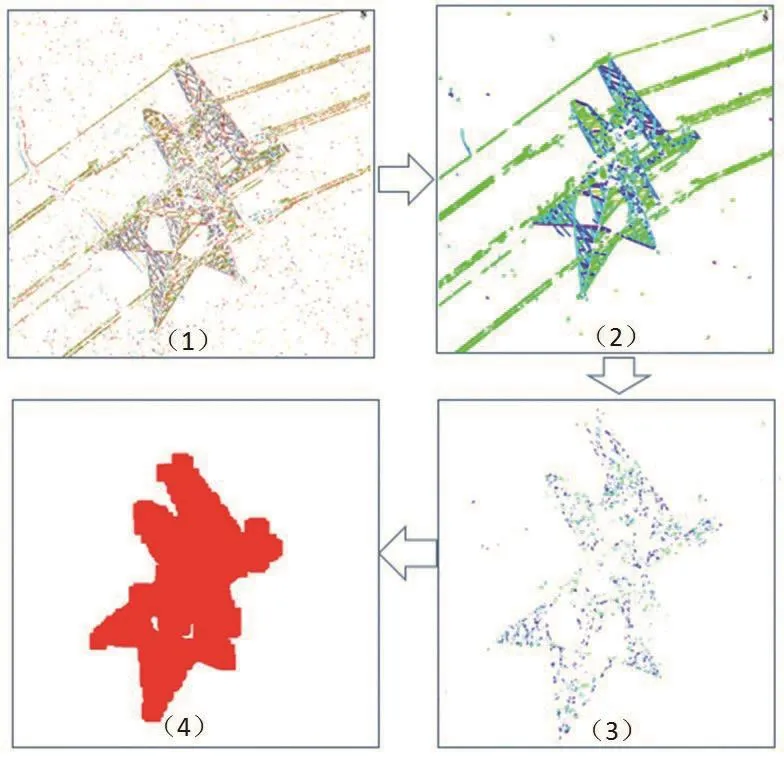
图6 电力塔识别Fig.6 Detection of power tower
1.5 电力线筛选
经过电力区域计算后,算法排除了在电力区域外的非电力线线特征。对于电力区域内的线特征,算法将继续筛选。
首先,利用梯度对称性统计电力线方向,筛选出符合梯度对称性的线特征,并且对线特征进行统计得到电力线的方向角度。然后利用电力线方向继续筛选,得到既符合梯度对称性又与电力线方向一致的线特征,如图7所示。
将筛选过的线特征两端延长至影像边缘,影像中每一像素的灰度值代表通过该像素上的线段数,由于电力线线特征所在区域密度大,所以累计影像中对应的位置像素灰度值较大,如图7所示,由此区分电力线和非电力线。
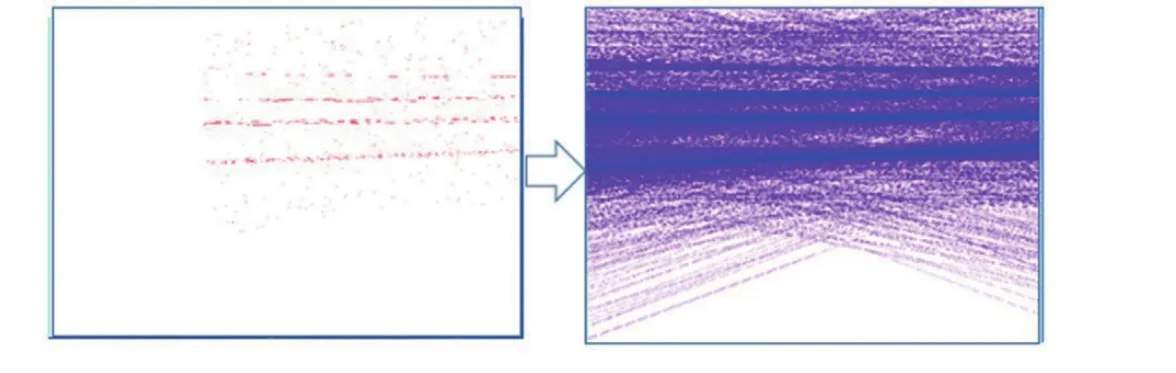
图7 电力线筛选Fig.7 Power lines selection
1.6 电力线缓冲区可靠性序列化连接
从图8可以看出来提取出来的电力线线特征非常精确,一条电力线可以分别提取两个边缘,但是这也给线特征的连接带来了问题。普通的线段分组算法没有办法准确地连接如此密集、距离如此小的线段。
为此,算法提出一种缓冲区内序列化的线段连接方法。从图8可以看到,电力线的特点是同一相几条电力线分裂线是相互平行的,彼此之间不会交叉,它们的顺序不会发生任何变化;而且有的区域电力线完整,有的区域电力线分裂性残缺,完整区域的电力线准确性可靠性很高。该算法原理是利用完整的高可靠性区域,人工对其进行编码排序,来对残缺的低可靠性区域进行连接。
算法流程如下:
1)建立电力线缓冲区,将同一相的电力线分裂线划分到同一缓冲区内部。
2)将电力线利用线特征方向把所有缓冲区内分裂性分为电力线上边缘与电力线下边缘两组,对上边缘进行处理。
3)统计缓冲区内部电力线分裂数。
4)垂直于电力线方向扫描缓冲区,只保留符合电力线分裂数的位置,同时对电力线进行排序。
5)对保留下来的电力线进行验证,保证两条分裂线之间的距离不变或者平滑变化。其方法是计算所有两个相邻的分裂电力线之间的距离,假设分裂电力线长度为m,对于jε[0,m] ,若符合公式(1),则保留,否则就删除。
6)连接保留下来的线段。
7)对下边缘进行3)~6)步骤。
8)验证上边缘与下边缘的距离,距离异常的位置删除后重新连接。

式(1)中,n表示缓冲区内共有n+1条分裂线,dist[i][j]是缓冲区内j位置上第i分裂线与第i+1分裂线之间的距离,dist_ave[i][j]是缓冲区内j位置到j-10位置上第i分裂线与第i+1分裂线之间的平均距离。
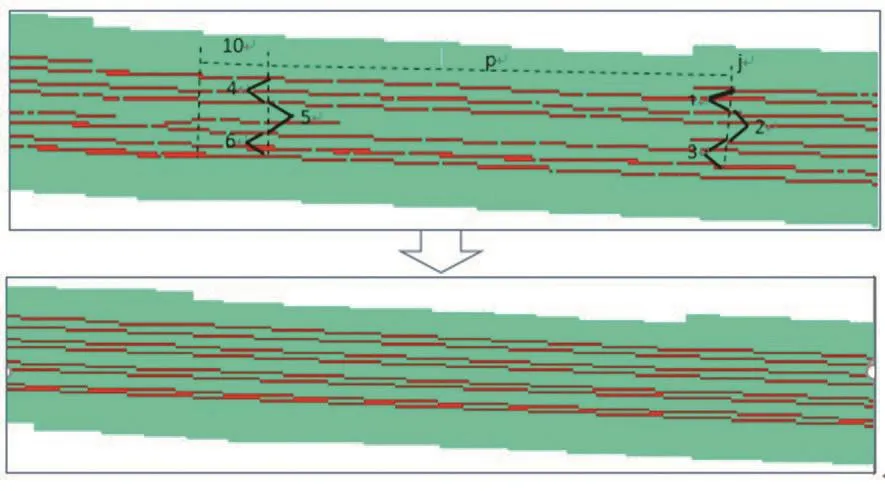
图8 缓冲区序列化线段连接Fig.8 Buffer lines sequencing connecting
如图8所示,1、2、3是电力线上边缘之间的距离,4、5、6是电力线下边缘之间的距离,若当前1位置为j,则1->dist[0][j],2->dist[1][j],3->dist[2][j],4->dist[0][j-p],5->dist[1][j-p],6->dist[2][j-p]。
2 实验结果与分析
2.1 实验数据来源
为验证本文算法的效果,本文采用的实验数据为项目《南方电网重点科技项目:基于直升机进行三维实景数据采集和量测平台建设的研究和应用》中,利用无人机所获得的深圳市400kv高压输电线路的航拍影像,该线路电力杆塔高度大约60 m,其电力线路采用的分裂数为4,每张图片的地面范围大概为100 m×70 m。
2.2 实验过程
本文利用高压输电线路的航拍影像进行电力线提取的实验,首先,先验证在背景存在杆塔的情况下的实验结果如图9~图12所示。
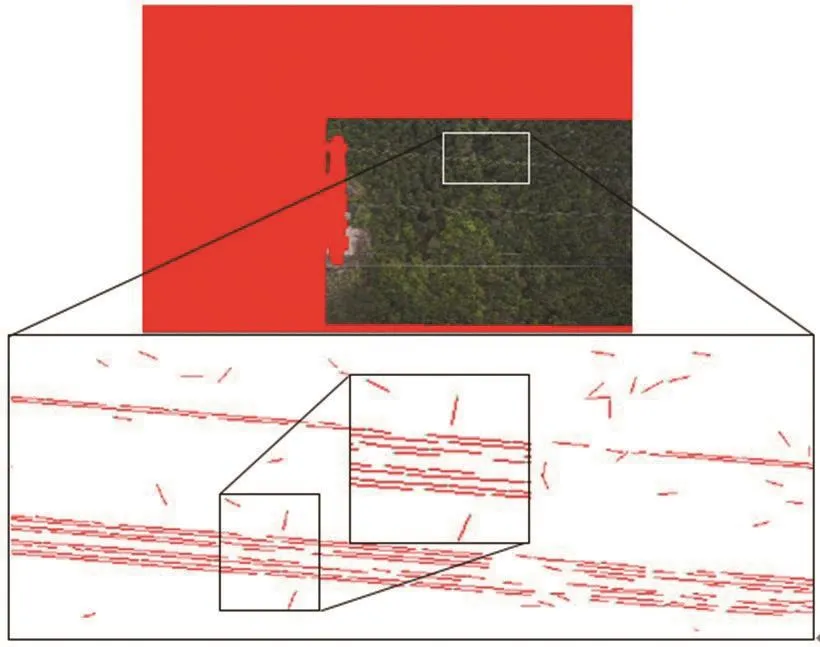
图9 LSD结果Fig.9 LSD results

图10 电力线段筛选Fig.10 Power lines selection
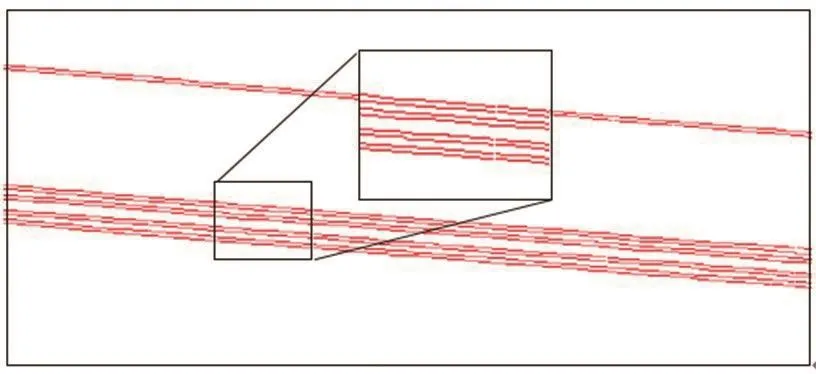
图11 电力线连接Fig.11 Power lines connect
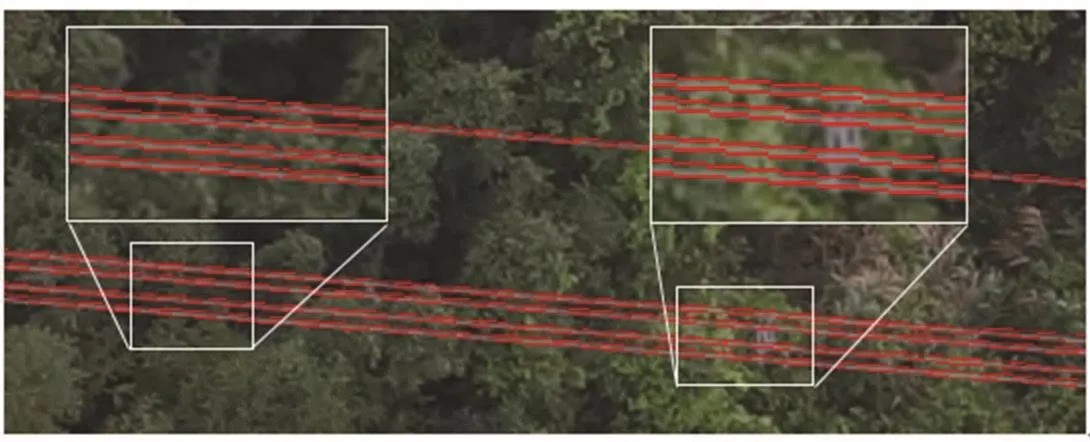
图12 提取结果Fig.12 Power lines result
2.3 实验过程分析与总结
按照论文第二章节的电力线提取流程,图9是航空影像经过LSD线段检测、电力杆塔识别、电力区域定位后的结果,可以看到影像中电力走廊外部区域已经被隔离,这一步极大地排除了大量非电力线的线特征干扰,但是从图9中也可以看到,电力走廊中仍然有很多干扰线特征。
接下来首先对电力走廊中的线特征进行对称性的检测,去除没有对称性的线段;然后计算线段累积影像,利用累积影像来筛选线特征,图10就是筛选处理后的结果,可以看出,筛选过程可以极大地剔除背景线特征,抗噪性非常强。
对于筛选出来的电力线段,本文利用可靠性序列化线段连接方法,对电力线段进行连接,从图11和图12可以看出,利用本文线段连接方法可以有效地对电力线进行连接,
从以上各个过程结果图可以看出,本文算法具有极高的抗噪能力,并且由于序列化线段连接算法,本文的算法可以得到十分完整准确的电力线。
除此之外,LSD完整地同时提取电力线两侧的边缘,由图可以看出,边缘提取极其准确,其算法精度非常高;并且由于可以提取两侧边缘,而本文算法仅仅需要一侧边缘即可,那么电力线漏检的概率就大大减小了,更加适合电力线与背景对比度较低的航空影像,也就是说本文算法具有极高的可靠度。
2.4 对比实验
为验证本文算法的可靠性,本文选取杆塔、植被、道路、裸地背景下的航拍影像,分别采用文献的算法和本文算法。图12即是两种算法的对比结果,为验证算法,本文选取的均是电力线与背景对比度较低的影像。
由图13(1)可以看出,文献算法由于Radon无法确定线段端点,其电力线的长度取决于影像分块大小;由图13(2)(3)(4)可以看出,文献算法在对比度较差情况下仅能提取一组电力线中的一条或两条,本文算法可以完整地提取出所有分裂电力线。
2.5 对比实验分析与总结
具体来说,本文算法相对于文献[6]来说,具有如下优势:
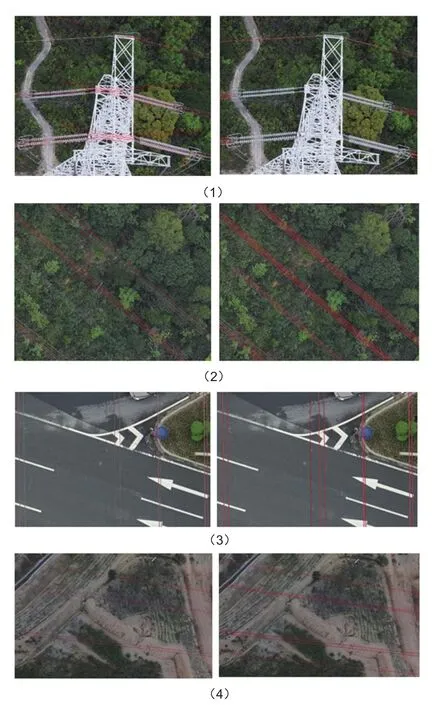
图13 本文提出算法与Ratio-Radon算法的比较(右图为本文算法)Fig.13 Comparing with Ratio-Radon algorithm(the right is by means of LSD)
1)使用LSD线段检测算法,检测的线段精度可以达到亚像素级别,Ratio算法精度没有达到亚像素级别。
2)使用LSD提取的线段是矢量数据,可以直接得到线段的坐标,线段方向等信息,而Ratio算法仅仅获得栅格信息,还需要Radon对像素信息进行拟合才能得到线段,而拟合过程必然会进一步损失精度。
3)LSD可以得到电力线双侧,任意一侧检测到即可,大大减小了漏检的可能性,增加了算法的可靠性,这可以从图13的(2)(3)(4)看出。
4)Radon算法只是拟合电力线的一种方法,算法无法得出线段两个端点,也就无法准确得到电力线与绝缘子的连接处,无法处理影像中存在电力塔的情况。
5)Radon算法的拟合精度不高,常常出现拟合后的线段误差很大情况。而本文的可靠性序列化连接精度很高,误差一般可以在一个像素内。
6)本文采用电力区域定位、对称性检测、累积影像、可靠性连接的方法来排除线段噪声的影响,而文献[6]仅仅只有Radon拟合方法,可以看出本文的抗噪性更强。
另外,和文献相比较,本算法过程中不需要其他先验信息(如电力线方向或电力线宽度)就可以提取一张影像中不同宽度和方向的电力线;相对于文献仅用于高压线的高度估算,本算法可以自动识别电力杆塔,自动提取两座相邻电力杆塔之间所有的分裂电力线,可用于电力线的三维建模。
3 结束语
近年来,国内外有关从航拍影像中提取高压电力线的研究日益增多,但是其大部分文献所提出的方法可能无法处理具有植被、裸地、湖泊、道路、房屋等复杂背景的影像。本文首先采用电力塔识别算法划分出电力线区域,利用LSD线特征提取算法检测出所有线特征,采用梯度对称性和线段累积影像对其进行筛选,最后对电力线进行缓冲区序列化连接。通过实验证明,本方法可以对影像进行全自动电力线提取,具有更高的精度、抗噪性、可靠性,并且可以实现将其结果与电力杆塔相关联,对提取航拍影像中电力线以及基于航拍影像的电力线三维建模有重要参考价值。
