基于多性能目标的拖拉机运输机组优化设计
2017-10-13刘孟楠周志立徐立友赵静慧闫祥海
刘孟楠,周志立,徐立友,,赵静慧,闫祥海
基于多性能目标的拖拉机运输机组优化设计
刘孟楠1,周志立2※,徐立友2,3,赵静慧3,闫祥海2
(1. 西安理工大学机械与精密仪器工程学院,西安 710048;2. 河南科技大学车辆与交通工程学院,洛阳 471003;3. 中国一拖集团有限公司技术中心,洛阳471039)
拖拉机运输机组总体参数的设计目标多元,约束条件复杂,传统经验法和单目标优化法难以使机组综合性能达到最优。该文以机组动力性、牵引点受力情况、附着性能和经济性最优为目标设计了目标函数;通过分析拖拉机运输机组动力学模型,确定了优化参数;通过研究拖拉机运输机组使用性能,制定了约束模型;采用改进型非支配排序遗传算法,导出了拖拉机运输机组总体参数多目标优化算法。以东方红150拖拉机运输机组为实例,优化了原有拖拉机和挂车的重力参数、质心位置和变速器传动比。设计试验与已有单目标优化方案和原始机组对比,结果为:运输Ⅰ挡和运输Ⅱ挡下,最大爬坡度分别提高1.35%、1.68%和1.38%、0.57%;牵引点受力分别减少1 222、703和2 792、2 125 N;驱动轮最大滑转率更接近特征滑转率;燃油消耗量分别下降12.9%和15.8%;改善了机组动力性、牵引点受力、附着性能、经济性,可为拖拉机运输机组配重方案和总体参数设计提供参考。
农业机械;拖拉机;优化;性能;运输机组;参数;多性能目标
0 引 言
拖拉机进行农业作业的同时还承担运输任务,额定功率下,运输机组的动力性和经济性高度耦合,驱动轮滑转率未达容许滑转率限时,二者呈非线性反比关系[1-2]。配重不足会导致驱动轮滑转现象严重,配重过度会产生额外的滚动阻力,降低运输机组经济性,通过优化机组总体参数可以在提高牵引效率的同时改善经济性[3-5]。
拖拉机制造企业通常采用类比法和经验法解决此类问题,无法有效针对机组结构和工况特点设计参数,导致机组使用性能无法达到最佳。国外,拖拉机运输机组单轴挂车质心位置偏前量通常较大,有益于增加拖拉机驱动轮载荷,提升附着性能,降低滑转损失;国内,运输机组中拖拉机承重通常较少,有利于改善拖拉机操纵稳定性[6]。加拿大卡尔顿大学的Wong教授通过研究升力系数、运载效率、传动效率与运输性能之间的关联性,建立了拖拉机运输机组运输效率通用模型[7];新加坡国立大学的Liu等基于MOBPP-2D模型(multi objective 2-dimensional mathematical model for bin packing problems with multiple constraints)对拖拉机运输机组的载荷分布进行了双目标优化[8];Pranav等通过采集拖拉机作业时的土壤、轮胎、农机具等数据,基于Visual Basic开发了拖拉机轴荷计算系统,准确度达到88%~96%,用于优化拖拉机机组配重方案[9];河南科技大学陈杰平等以运输效率为目标,基于Delphi作为主开发系统,结合Fortran、Gt等软件对拖拉机运输机组进行了总体参数优化,优化后机组坡道特性达到理想坡道特性,滑转率未达到容许滑转率限[10-11]。相关研究可使机组特定性能达到最优,无法保证综合使用性能较好。
本文立足于此提出一种基于改进非支配排序遗传算法的拖拉机运输机组总体参数优化方法,处理目标函数之间的复杂耦合关系,优化机组经济性、动力性,并改善牵引点受力情况和驱动轮附着性能。以期提升拖拉机运输机组综合使用性能。
1 受力分析及优化参数确定
图1为后轮驱动拖拉机运输机组受力分析。
假设车轮的滚动阻力系数相同, 导出发动机输出转矩为q时的拖拉机运输机组动力学模型为
(2)
;(3)

(5)
(6)
式中为重力加速度,取=9.8 m/s2;为行驶速度,km/h;D为空气阻力系数;为拖拉机迎风面积,m2;k为变速器传动比;0为中央传动和最终传动总传动比;T为传动效率。

注:Wt、Wg为分别为拖拉机和挂车的重力,N;V为行驶速度,km·h-1;Fq为驱动力,N;地面对于拖拉机前轮、后轮和挂车车轮的支持力分别为Zc、Zq和Zg,滚动阻力分别为Ffc、Ffq和Ffg,N;滚动阻力矩分别为Mfc、Mfq和Mfg,N·m;机组加速阻力分别Fjt和Fjg,N;加速阻力矩分别为Mjc、Mjq和Mjg,N·m;Fw、Fα分别为机组的空气阻力和坡度阻力,N;α为坡度角,rad;L为拖拉机轴距,m;a为拖拉机质心到驱动轮中心距离,m;rc为拖拉机从动轮半径,m;rq为拖拉机驱动轮半径,m;rg为挂车车轮半径,m;h为拖拉机质心高度;m;Lg为挂车车轮到牵引点的距离,m;ag为挂车质心到挂车车轮中心的水平距离,m;hg为挂车质心高度,m;hT为牵引点高度,m;LT为牵引点到驱动轮的水平距离,m;Fx和Fz为牵引力的垂向和纵向分量,N。
根据式(1)、(2)可知,在发动机性能一定的情况下,拖拉机机组性能主要由c、q和g决定。此外,q的发挥受到最大附着力ad(N)的限制,为:

在路面、轮胎等条件不变时,可认为驱动轮附着系数不变,ad大小主要取决于q。因此,根据式(4)~(6)可知,影响运输机组性能的主要总体参数为拖拉机重力及质心位置、挂车重力及质心位置、拖拉机轴距、牵引点位置、车轮半径和传动系传动比。本文选择对拖拉机运输机组中可以通过外载配重调整的tgg总体参数进行优化,并对变速器传动比k进行优化,提升运输机组性能。
2 约束条件
受载荷波动影响,需保证前轮动载荷不能少于整机使用重力的15%~20%,根据式(4)导出
将式(5)代入式(8),消去g,则稳定性约束为
(9)
运输机组作业时,挂车产生纵向振动,引起牵引点承受冲击载荷。必须避免牵引点产生负增重力,导致过大的冲击载荷[11]。则约束条件为

(11)
驱动轮载荷受到承载能力qlim的限制,根据式(6)导出约束模型为
将式(5)代入式(12),得
(13)
采用动载荷系数对机组重力参数进行约束,需预留起步过程的功率储备,且应大于其最小运用载荷系数

式中ed为发动机额定转矩,N·m;d为拖拉机运输机组动载荷系数;y为发动机最小运用载荷系数,取y=0.85d。
当驱动轮滑转率超过容许滑转率限permit时,整机牵引效率明显下降[12]。优化时,需通过约束质心位置和机组重力使驱动轮滑转率符合容许滑转率限要求。根据文献[13-14]中的拖拉机驱动轮滑转率模型和式(7),可得

(16)
(17)
式中*为容许滑转率,%;为最大附着系数。
3 目标函数设计
根据文献[11],导出动力性目标函数为

为减少拖拉机行驶功率消耗,经济性目标为
(19)
根据式(3),导出牵引点受力目标函数为

根据式(13),导出附着性能目标函数为
(21)
4 优化方法设计
4.1 算法设计
目前常用的多目标优化算法有:强度帕累托进化算法SPEA(strength pareto evolutionary algorithm)、粒子群算法PSO(particle swarm optimization)、非支配遗传算法NSGA(non-domination sorting genetic algorithms)、改进非支配遗传算法NSGA-Ⅱ(non-domination sorting genetic algorithms-Ⅱ)等[15-17]。相比SPEA, NSGA-Ⅱ具有更好的收敛性、前端分布和多样性赋存机理[18];相比PSO,NSGA-Ⅱ具有更好的多样性[19];相比NSGA,NSGA-Ⅱ通过增加精英策略、密度值估计策略和快速非支持排序策略,较大程度地降低了算法复杂度[20-21]。NSGA-Ⅱ算法广泛应用于处理诸如电网系统规划[22-23]、路径优化[24-25]、混合动力车辆驱动系统匹配[26-27]等工程实践中的多目标优化问题。因此,在MATLAB环境下,本文采用基于NSGA-Ⅱ算法的gamultiobj函数处理拖拉机运输机组优化模型。通过调用gacommon函数确定优化模型的约束类型,调用gamultiobjsolve函数对多个目标函数进行最优值求解。
根据目标函数和约束条件,设计拖拉机运输机组优化算法流程如图2所示。

图2 拖拉机运输机组优化流程
优化时,设置最优前端个体系数为0.3,种群大小为100,最大进化代数为200,停止代数为200,适应度函数值偏差为1e-1 000。首先通过gacommon.m处理约束(14);基于gamultiobjsolve.m对目标函数(18)、(19)开展求解,计算机组重力参数;其中,初始化种群由gamultiobjsolveMakeState.m随机生成初始化种群。然后,根据式(22)处理稳定性约束(9)和驱动轮承载能力约束(13),并以约束的形式建立重力参数优化过程和质心位置优化过程间的逻辑关系。根据式(23)对目标函数(21)进行等效变换;再次通过gamultiobjsolve.m求解质心位置参数;并在判断适应度函数偏差之后添加基于约束式(11)、式(17)的判断。最后,根据式(1)~(6)计算对应优化后运输机组参数的拖拉机传动比。

(23)
式中qcon为稳定性约束和承载能力约束的合并约束。
4.2 优化实例
以东方红150拖拉机运输机组为实例进行多目标优化,原始参数可见文献[11]。
图3为实例中目标函数Pareto前端个体分布情况。由图可知,(t,g)best为27 000 N,(t,g)best为0.421 5;q的优化结果达到约束边界,最优解集唯一,(g,g)best为1 600,(tgg)best为0。在得到目标函数的前端个体分布后,MATLAB的Workspace返回对应的Pareto解集。

图3 目标函数Pareto前端个体分布
结合已有基于Delphi的单目标优化方案[10]和优化前机组设立对照组,3种方案的tgg、k参数如表1所示。基于NSGA-Ⅱ算法优化后的运输机组重力相较优化前下降了6.86%,拖拉机质心位置前移0.074 m,挂车质心位置后移0.14 m;机组重力较基于Delphi的优化结果下降了3.26%,拖拉机质心位置后移0.022 m,挂车质心位置后移0.3 m。下文将通过试验分析目标性能的提升效果。
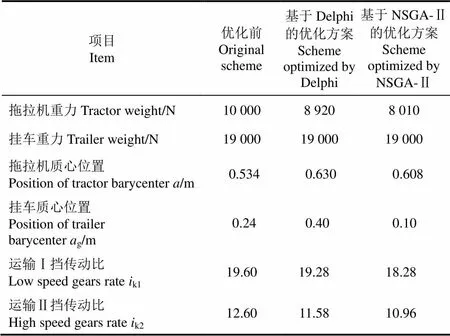
表1 优化前、Delphi和NSGA-Ⅱ优化方案对比
5 对照分析
图4为试验原理及设备。

注:1为车辆综合性能测试系统;2为RF无线数传模块;3为GPS模块;4为负荷传感器;A~E为试验坡道,最大坡度分别为2%、5%、7%、9%和12%。
选择地处洛阳的国家拖拉机试验检测基地内最大坡度为2%、5%、7%、9%和12%的A、B、C、D、E坡道按照表1中参数和文献[28]中的拖拉机质心估算模型和调整方法调整被试机组开展试验,分析优化方法对于拖拉机运输机组动力性、牵引点受力和附着性能的提升效果[29]。设计试验为:测量出发位置到各坡道变坡线的水平位置,以对照单次试验中测量得到的机组位置信息,从而对应该位置信息下测量的牵引点轴端拉力、实际车速等信号;单次试验驾驶员保持相同出发速度,并于开始爬坡时以最大加速度加速。具体试验方法为:在拖拉机牵引点轴端添加BLR-1M10T型电阻应变拉压式负荷传感器测量牵引点轴端拉力。试验车牵引点轴端与车架之间为铰接,通过测量运输机组在测试坡道上的牵引点轴端轴向和车架间的静态角度计算牵引点水平力和法向力。为避免驱动轮滑转对车速测量过程的干扰,通过添加频率1 575.42 MHz、额定电压3.0~5.0 V的GPS模块接收机组实际车速和位置信息,并通过洛阳耐欧电气有限公司开发的VDM-BS/TL型车辆综合性能测试系统对单一采样步长内的拉力信号、位置信号进行处理,得出该采样步长内的牵引点轴端拉力和实际车速数值为

式中p为拖拉机牵引点轴端拉力,N;max为最大采样次数;为单次采样计数。
由YL-500IW-232型RF无线数传模块将测量数据上传至上位机端,计算牵引功率,并配合显示车速计算滑转率。数据修正后采用最小二乘法多项式对离散试验数据进行回归分析,得到连续的坡道特性对照结果。
图5为动力性和牵引点受力对比情况。由图5a可知,运输挡下,基于NSGA-Ⅱ算法优化的运输机组爬坡度情况较基于Delphi的优化方案更好。东方红150拖拉机单轴挂车运输机组低速挡和高速挡的最大爬坡度k1max、k2max分别应大于5%和2%[11];运输Ⅰ挡下,NSGA-Ⅱ优化方案、Delphi优化方案和优化前的最大爬坡度分别为10.61%、9.26%、8.93%;运输Ⅱ挡下,三者的最大爬坡度分别为4.67%、3.29%、4.10%;符合要求。运输Ⅰ挡下,基于NSGA-Ⅱ算法多目标优化运输机组的最大爬坡度比基于Delphi的单目标优化方案和优化前分别提高1.35%和1.68%;运输Ⅱ挡下,分别提高1.38%、0.57%。基于NSGA-Ⅱ的多目标优化方案具有更好的动力性。由图5b可知,运输Ⅰ挡车速范围内,NSGA-Ⅱ优化方案、Delphi优化方案和优化前机组方案中牵引点纵向力的平均值分别为1 839、1 631、1 575 N;运输Ⅱ挡下车速范围内,牵引点纵向力的平均值分别为794、546、695 N,基于NSGA-Ⅱ优化方案的拖拉机牵引点纵向力较大。由图5c可知,运输Ⅰ挡、Ⅱ挡下基于NSGA-Ⅱ优化的运输机组牵引点平均受力较基于Delphi的优化方案和原方案分别下降1 222、703和2 792、2 125 N,牵引点受力情况得到较大改善。

图5 动力性和牵引点受力情况对比
图6为附着性能对比情况。由图可知,最大驱动力范围内,NSGA-Ⅱ优化方案、Delphi优化方案和优化前机组方案驱动轮最大滑转率未达容许滑转率限15%~18%,符合优化要求。由于基于Delphi的单目标优化方案中g值最大,机组中z和q最大,驱动轮附着性能最好,驱动轮滑转率最低。基于NSGA-Ⅱ算法的多目标优化算法中包含以改善牵引点受力的目标函数,因此优化后运输机组中拖拉机驱动轮滑转率较优化前有所增加,幅度较小。拖拉机运输机组的车速-负载特性导致驱动轮滑转率未达容许滑转率限。由于拖拉机驱动轮滑转率模型具有非线性的单调递增性,当≧0.632,即≧*时,加速递增,3种方案的q差异引起的差异将较为明显;反之,当驱动轮滑转率未达容许滑转率限时,3种方案下拖拉机运输机组的驱动轮滑转损失差别较小。因此,本文优化方案的牵引功率更大。
根据前期研究成果[30],以东方红150拖拉机配套柴油机台架试验数据作为原始数据;根据车速范围,设计EUDC_man_tractor工况,对3种方案的经济性进行分析。
图7为经济性对比情况。由图可知,由于机组重力较小,基于NSGA-Ⅱ算法优化的运输机组燃油消耗率始终最低,平均达到1.485 L/h;循环工况内燃油消耗量为0.165 L,比基于Delphi的优化方案和优化前机组平均降低12.9%和15.8%,经济性较好。
基于NSGA-Ⅱ进行多目标优化后,东方红150拖拉机单轴挂车运输机组动力性和经济性获得较大提升;牵引点受力情况得到改善;最大滑转率更接近特征滑转率,附着性能较好。

图6 附着性能对比
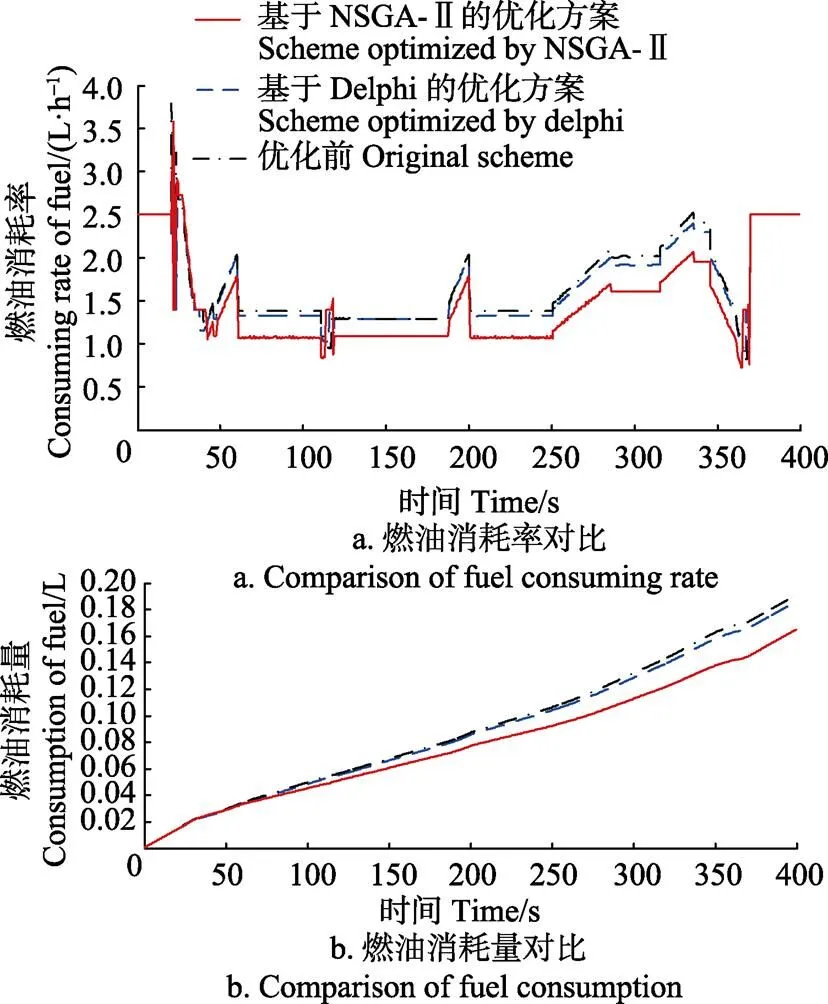
图7 经济性对比
6 结 论
1)本研究提出了基于NSGA-Ⅱ算法的拖拉机运输机组总体参数优化方法,分别以动力性、经济性、牵引点受力和驱动轮附着性能设计了目标函数,在拖拉机使用性能框架内制定了约束条件,设计了优化算法流程。
2)通过设立对照组,对东方红150拖拉机运输机组总体参数进行了优化,优化结果为:基于NSGA-Ⅱ算法的优化方案的拖拉机质心位置比基于Delphi的单目标优化方案后移0.022 m,比优化前前移0.074 m;挂车质心位置比二者分别后移0.3 m和0.14 m;机组重力比二者分别下降3.26%和6.86%。
3)分别对比基于Delphi的单目标优化方案和优化前方案,基于NSGA-Ⅱ算法的优化方案运输Ⅰ挡最大爬坡度提高了1.35%和1.68%,运输Ⅱ挡最大爬坡度提高了1.38%和0.57%;运输Ⅰ挡牵引点受力下降了1 222、 703 N,运输Ⅱ挡牵引点受力下降了2 792、2 125 N,牵引点纵向力增加;最大滑转率有所增加,更接近特征滑转率;牵引功率较大;EUDC_man_tractor工况下燃油消耗量平均降低12.9%、15.8%,算法达到优化目标。
[1] Wong J Y. Theory of Ground Vehicles 4ndEdition[M]. New York: John Wiley, 2008: 320-324.
[2] 赵剡水,杨为民. 农业拖拉机技术发展观察[J]. 农业机械学报,2010,41(6):42-48. Zhao Yanshui, Yang Weimin. Technological development of agricultural tractor[J]. Transactions of the CSAM, 2010, 41(6): 42-48. (in Chinese with English abstract)
[3] Davies D B, Finney J B, Richardson S J. Relative effects of tractor weight and wheel-slip in causing soil compaction[J]. Journal of Soil Science, 1973, 24(3): 399-409.
[4] Mulcahy N L. Bridge response with tractor-trailer vehicle loading[J]. Earthquake Engineering & Structural Dynamics, 1983, 11(5): 649-665.
[5] Tayanovsky G A, Tanas W. Principles and problems of the tractors transport-pull units unitization analysis[J]. Teka Komisji Motoryzacji I Energetyki Rolnictwa, 2004(4): 196-204.
[6] 贾鸿社,周志立,周政. 拖拉机机组系统研究现状及展望[J]. 拖拉机与农用运输车,2000(4):13-17. Jia Hongshe, Zhou Zhili, Zhou Zheng. Study and outlook of tractor unit systems[J]. Tractor & Farm Transpoter, 2000(4):13-17. (in Chinese with English abstract)
[7] Wong J Y. Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road vehicle Performance and Design 2ndEdition[M]. Oxford: Elsevier Ltd, 2010: 129-149.
[8] Liu D S, Tan K C, Huang S Y, et al. On solving multiobjective bin packing problems using evolutionary particle swarm optimization[J]. European Journal of Operational Research, 2008, 190(2): 357-382.
[9] Pranav P K, Pandey K P. Computer simulation of ballast management for agricultural tractors[J]. Journal of Terramechanics, 2008, 45(6): 185-192.
[10] 陈杰平,周志立,张文春. 拖拉机机组系统性能CAD的混合编程[J]. 拖拉机与农用运输车,2002,16(1):86-88. Chen Jieping, Zhou Zhili, Zhang Wenchun. CAD hybrid programming of tractor unit systems character[J]. Tractor & Farm Transpoter, 2002, 16(1): 86-88. (in Chinese with English abstract)
[11] 周志立,方在华. 拖拉机机组牵引动力学[M]. 北京:科学出版社,2010:207-250.
[12] Liu M N, Xu L Y, Zhou Z L. Design of a load torque based control strategy for improving electric tractor motor energy conversion efficiency[J]. Mathematical Problems in Engineering, 2016,2016(5): 1-14.
[13] 周志立,方在华,张文春. 拖拉机牵引特性的计算机辅助分析[J]. 洛阳工学院学报,1993,14(1):1-6. Zhou Zhili, Fang Zaihua, Zhang Wenchun. Computer aided analysis on the theoretical tractive characteristics of tractor[J]. Journal of Luoyang Institute of Technology, 1993, 14(1): 1-6. (in Chinese with English abstract)
[14] 徐立友,刘孟楠,周志立. 串联式混合动力拖拉机驱动系设计[J]. 农业工程学报,2014,30(9):11-18. Xu Liyou, Liu Mengnan, Zhou Zhili. Design of drive system for series hybrid electric tractor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(9): 11-18. (in Chinese with English abstract)
[15] Zhou A, Qu B Y, Li H, et al. Multiobjective evolutionary algorithms: A survey of the state of the art[J]. Swarm and Evolutionary Computation, 2011, 1(1): 32-49.
[16] Tan K C, Lee T H, Khor E F. Evolutionary algorithms for multi-objective optimization: performance assessments and comparisons[J]. Artificial Intelligence Review, 2002, 17(4): 251-290.
[17] Elbeltagi E, Hegazy T, Grierson D. Comparison among five evolutionary-based optimization algorithms[J]. Advanced Engineering Informatics, 2005, 19(1): 43-53.
[18] Deb K, Pratap A, Agarwal S, et al. A fast and elitist multiobjective genetic algorithm: NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197.
[19] Hirano H, Yoshikawa T. A study on two-step search using global-best in PSO for multi-objective optimization problems[C]//2012 Joint 6th International Conference on Soft Computing and Intelligent Systems and 13th International Symposium on Advanced Intelligent Systems. Kobe, IEEE, 2012: 1894-1897.
[20] Deb K, Jain H. Handling many-objective problems using an improved NSGA-II procedure[C]//2012 IEEE Congress on Evolutionary Computation. Brisbane, IEEE, 2012: 1-8.
[21] Deb K, Karthik S. Dynamic multi-objective optimization and decision-making using modified NSGA-II: A case study on hydro-thermal power scheduling[C]//International Conference on Evolutionary Multi-Criterion Optimization, Matsushima, Springer Berlin Heidelberg, 2007: 803-817.
[22] 王茜,张粒子. 采用NSGA-Ⅱ混合智能算法的风电场多目标电网规划[J]. 中国电机工程学报,2011,31(19):17–24. Wang Qian, Zhang Lizi. Multi-objective transmission planning associated with wind farms applying NSGA-Ⅱ hybrid intelligent algorithm[J]. Proceedings of the CSEE, 2011, 31(19): 17-24. (in Chinese with English abstract)
[23] 王洪涛,刘玉田. 基于NSGA-Ⅱ的多目标输电网架最优重构[J]. 电力系统自动化,2009,33(23):14-18. Wang Hongtao, Liu Yutian. Multi-objective optimization of power system reconstruction based on NSGA-Ⅱ[J]. Automation of Electric Power Systems, 2009, 33(23): 14-18. (in Chinese with English abstract)
[24] Ahmed F, Deb K. Multi-objective optimal path planning using elitist non-dominated sorting genetic algorithms[J]. Soft Computing, 2013, 17(7): 1283-1299.
[25] 徐慧英,赵建民,张泳,等. 改进NSGA-Ⅱ算法在车辆路径多目标优化问题中的应用[J]. 计算机工程与科学,2010,32(10):117-121. Xu Huiying,Zhao Jianmin,Zhang Yong,et al. Application of the improved NSGA-Ⅱ in multi objective optimization for the vehicle routing problem[J]. Computer Engineering & Science, 2010, 32(10): 117-121. (in Chinese with English abstract)
[26] 胡晓林,王仲范,廖连莹,等.多目标演化算法在混合电动车设计和控制中的应用[J]. 武汉理工大学学报:交通科学与工程版,2004,28(3):384-387.Hu Xiaolin, Wang Zhongfan, Liao Lianying, et al. Application of multi-objective evolutionary algorithm in hybrid electric vehicle design and control[J]. Journal of Wuhan University of Technology: Transportation Science & Technology, 2004, 28(3): 384-387. (in Chinese with English abstract)
[27] Buerger S, Lohmann B, Merz M, et al. Multi-objective optimization of hybrid electric vehicles considering fuel consumption and dynamic performance[C]//2010 IEEE Vehicle Power and Propulsion Conference. Lille, IEEE, 2010: 1-6.
[28] 《拖拉机》编辑部. 拖拉机设计和计算[M]. 上海:上海科学技术文献出版社,1980:37-39.
[29] 日本自动车技术会,中国汽车工程学会. 汽车工程手册6-动力传动系统试验评价篇[M]. 北京:北京理工大学出版社,2010:37-38.
[30] 刘孟楠,徐立友,周志立,等. 增程式电动拖拉机及其旋耕机组仿真平台开发[J]. 中国机械工程,2016,27(3):413-419. Liu Mengnan, Xu Liyou, Zhou Zhili, et al. Establishment of extended range electric tractor and its rotary cultivator’s simulative platforms[J]. China Mechanical Engineering, 2016, 27(3): 413-419. (in Chinese with English abstract)
Multi-objective optimization and design of tractor trailer systems
Liu Mengnan1, Zhou Zhili2※, Xu Liyou2,3, Zhao Jinghui3, Yan Xianghai2
(1.710048,;2.471003,;3.471039,)
Due to that the design aims for structural parameters of semi-trailer tractor are multivariate and the constricted boundary condition of this designing process is complicated, the utilizations of empirical approach and the single objective optimization can’t always promote the comprehensive performance of semi-trailer tractor. Based on non-dominated sorting genetic algorithm II (NSGA-II), a new optimizing method about semi-trailer tractor’s structure parameters was put forward. By analyzing structural and dynamic characteristics of semi-trailer tractor’s 2-DoF (degree of freedom) model, optimizing principles were established. According to the tractor operation performance including the manipulative stability, negative weight addition, limitation of driving wheel’s load, load rate of engine power and adhesive characteristic, the constricted boundary conditions were designed. The optimizing objective functions were formulated, which included fuel economy, power performance and force status of tractive point. YTO-150 tractor and the matched semi-trailer were collected as the investigative and optimized object. According to the theoretical analysis and mathematical modeling of the tractor and trailer dynamic performance, the 4 objective functions were divided into 2 groups which involved contradictory relation. After the multiple mathematic conversions of objective functions and constraint functions, the complicated and coupled relationship between the optimal objects could be simplified. Using NSGA-II two times , the semi-trailer tractor’s structure parameters and the gear ratios of transportation work condition were calculated. And relevant program was redacted. Parameters including the gravity of the tractor and semi-trailer, and the position of each part’s barycenter were optimized. And the transmission ratio of each transportation gear was modified. The figure describing the Pareto front end of each aimed function was plotted. As compared with the primitive semi-trailer tractor, the total weight was declined by 6.86%, the position of the tractor’s barycenter moved forward by 0.074 m, and the position of the trailer’s barycenter moved backward by 0.14 m. As compared with the single objective optimizing result with the way of developing the CAD (computer aided design) systems of Delphi, the total weight was declined by 3.26%, the position of the tractor’s barycenter moved backward by 0.022 m, and the position of the trailer’s barycenter moved backward by 0.3 m. On 5 different gradient test ramps, the climbing performance experiment was performed. And in the climbing tractor and trailer, the velocity and pull force on the traction axle were measured by the GPS (global position system) device and resistance strain pull and pressure sensor. When the tractor was driven under the transportation gearⅠ, the maximum climbing degree was improved by 1.35% and 1.68%, and the average force of the tractive point declined by 1 222 and 703 N, respectively, compared with the single objective optimizing scheme and primitive semi-trailer tractor. When the tractor was driven under the transportation gearⅡ, the maximum climbing degree was improved by 1.38% and 0.57%, and the average force of the tractive point declined by 2 792 and 2 125 N, respectively, compared with the single objective optimizing scheme and primitive semi-trailer tractor. The fuel economy of the tractor trailer systems was simulated by the simulator, which was developed upon the dynamic joint between AVL CRUISE and MATLAB. When the simulation adopted the marked working condition based on EUDC (extra urban driving cycle), the fuel consuming rate of the multi-objective optimized semi-trailer tractor declined by 12.9% and 15.8%, respectively, compared with the single objective optimizing scheme and primitive semi-trailer tractor. To sum up, this optimized method reaches the requirement of the objective functions, and provides the theoretical and technologic foundation for improving tractive vehicle systems.
agricultural machinery; tractors; optimization; perfoemance; trailer system; parameters; multi-objectives
10.11975/j.issn.1002-6819.2017.08.008
S219.0
A
1002-6819(2017)-08-0062-07
2016-07-18
2017-03-31
“十三五”国家重点研发计划项目(2016YFD0701002);国家自然科学基金资助项目(51375145);河南省基础与前沿技术研究项目(102102210165)
刘孟楠,男,河南洛阳人。博士生,研究方向为拖拉机新型驱动系统及控制技术。西安 西安理工大学机械与精密仪器工程学院,710048。Email:liumengnan27@163.com
周志立,男,河南洛阳人。博士,教授,博士生导师,研究方向为车辆新型传动理论与控制技术,中国农业工程学会常务理事。洛阳 河南科技大学车辆与交通工程学院,471003。Email:zzli@haust.edu.cn
刘孟楠,周志立,徐立友,赵静慧,闫祥海. 基于多性能目标的拖拉机运输机组优化设计[J]. 农业工程学报,2017,33(8):62-68. doi:10.11975/j.issn.1002-6819.2017.08.008 http://www.tcsae.org
Liu Mengnan, Zhou Zhili, Xu Liyou, Zhao Jinghui, Yan Xianghai. Multi-objective optimization and design of tractor trailer systems[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 62-68. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.08.008 http://www.tcsae.org