基于FFRLS的质心位置修正的ESP控制研究∗
2017-10-12张荣芸陈无畏时培成赵林峰
张荣芸,陈无畏,时培成,赵林峰,肖 平
基于FFRLS的质心位置修正的ESP控制研究∗
张荣芸1,陈无畏2,时培成1,赵林峰2,肖 平1
(1.安徽工程大学机械与汽车工程学院,芜湖 241000; 2.合肥工业大学汽车与交通工程学院,合肥 230009)
建立了描述汽车横摆、侧向、纵向、垂向、侧倾和4个车轮运动的汽车模型,利用卡尔曼滤波状态观测器对前后轴悬架力进行估计,采用遗忘因子的递推最小二乘估算法对质心位置进行估计,并用估计的质心位置来修正参考模型得到的横摆角速度和质心侧偏角的期望值,最后设计了ESP系统的参数自整定模糊PID控制器,并进行了仿真和硬件在环试验,结果表明,考虑质心位置变化的ESP控制器的效果比未考虑的控制器好,使汽车在高速转向制动行驶时具有更好的横向稳定性。
汽车;质心位置;遗忘因子递推最小二乘估计;参数自整定模糊PID控制;稳定性控制
Keywords:vehicle; mass center position; forgetting-factor recursive least square; parameter self-tuning fuzzy PID control;stability control
前言
汽车转向行驶时的横向稳定性非常重要。为使汽车在高速转向时具有良好的横向稳定性,许多学者进行了大量的研究。文献[1]中运用H∞控制理论设计了控制器,通过对主动悬架执行器时滞和悬挂质量变化进行控制,使汽车同时达到较好的舒适性和操纵稳定性;文献[2]中利用模型预测控制方法设计了控制器,在考虑电子限滑差速器作用的基础上,提高了跟踪期望横摆角速度和质心侧偏角的性能,改善了汽车的横向稳定性。另外,还有学者通过对汽车参数的估计来对横向稳定性控制进行优化。例如,有利用实验数据在线运用带有多重遗忘因子的递推最小二乘法来估计汽车的质量和路面等级[3],或利用卡尔曼滤波器来估计反馈控制器中的状态参数,通过对主动悬架的控制,以达到有效改善汽车舒适性和横向稳定性的目的[4-5]。文献[6]中还对与汽车操纵特性联系紧密的侧偏刚度和侧向速度进行了估计,达到了较好的效果。
综上所述,目前在对汽车高速转向行驶中的横向稳定性研究方面,主要通过对控制算法的优化和汽车相关参数的精确估计来达到改善汽车横向稳定性的目的,但仍存在一些不足,主要是在设计控制系统参考模型时,均将汽车参数作不变处理。但实际行驶工况中,像质量、质心位置和轮胎侧偏刚度等参数会随工况而变化,这就导致采用固定参数的参考模型计算得到的期望值与汽车实际参数所对应的期望值存有偏差,会影响横向稳定性的控制效果。
针对上面分析得出的不足,本文中首先建立了包括悬架的整车模型;运用FFRLS方法完成了对汽车质心到前后轴距离的估计;在该估计的参数基础之上,以2自由度汽车模型为参考模型,设计了ESP的参数自整定模糊PID控制器;仿真和硬件在环试验验证了该方法的有效性。
1 汽车系统模型
1.1 整车模型
假设汽车在水平路面上行驶,忽略空气阻力,建立描述汽车横摆、侧向、纵向、垂向、侧倾和包括4个轮胎运动的汽车模型,对汽车的转向运动和侧倾运动的描述分别如图1和图2所示。

图1 整车转向模型
汽车动力学方程如下,包括纵向、侧向和横摆运动:


图2 整车侧倾模型
式中:m和ms为汽车总质量和悬挂质量;hr为质心到侧倾轴的距离;Iz为绕 z轴的转动惯量;vx,vy,ωr和φ为汽车的纵向、侧向速度、横摆角速度和侧倾角;Fx,Fy和 Mz为汽车沿x,y轴的合力和关于z轴的横摆转矩。
汽车的侧倾运动方程可表示为

式中:Ix为绕x轴的转动惯量;Mx为汽车关于x轴的侧倾转矩。
∑Fx,∑Fy,∑Mz和∑Mx可具体表示为

式中:B为汽车轮距,假设前后轮距相等;qf和qr为前、后轴悬架上支点到汽车纵对称面的距离(因对称,左右悬架相同);Fsi为悬架力(i= fl,fr,rl,rr);lf和lr为质心到前轴和后轴的距离;δfl和δfr为汽车左前轮和右前轮的转角,假设左右轮转向角相等。
轮胎的运动方程为

式中:Iw和ωi为车轮的转动惯量和角速度;Ti和Re为驱动或制动力矩和车轮有效半径。
轮胎所受垂直载荷为

式中h为质心高度。
车轮中心速度为

车轮的侧偏角为

由此可以推导出每个轮胎的滑移率为

1.2 整车垂向运动模型
在研究汽车垂向运动时,作如下假设:4个悬架的参数和路面输入相同;汽车侧倾较小,纵向速度变化不大。经过简化后的垂向运动如图3所示。

图3 整车垂向运动模型
对汽车垂向运动分析后,得悬挂质量运动方程为

式中:zc为质心的垂向位移;ψ为汽车俯仰角;Fsf和Fsr为前后轴左右悬架力之和;ms和Iy为汽车的悬挂质量和绕y轴的转动惯量;hp和ay为质心到俯仰中心的距离和汽车的纵向加速度。
非悬挂质量运动方程为

其中

式中:mufj和 murj为前后轴的非悬挂质量;zufj和 zurj为前后轴非悬挂质量垂向位移;zsfj和zsrj为前后轴悬挂上支点处位移;zfj和zrj为前后轴路面的激励输入;ufj和 urj为前后轴悬挂的力输入;ksfj,ksrj,csfj和 csrj为前后轴悬挂刚度和阻尼;ktfj和ktrj为前后轴轮胎的刚度。
1.3 轮胎模型
采用“魔术公式”[7]描述轮胎力与侧偏角和滑移率之间的关系:

式中各符号的含义见文献[7]。其中:d=a1Fz2+a2Fz;b=bcd/cd;e=a6Fz2+a7Fz+a8。 当所求为侧向力时,c=1.30,bcd=a3sin(a4arctan(a5Fz));当所求为纵向力时,c=1.65,bcd=a3Fz2+a4Fz/ea5Fz。
由于本文中主要研究汽车在高速转向制动工况下的横向稳定性问题,故轮胎主要是在转向制动联合工况下工作。根据“魔术公式”模型可以求出该联合工况下每个轮胎的侧偏力Fy、纵向力Fx与侧偏角α、滑移率s和相应轮胎垂直载荷 Fz之间的关系为

其中

式中:Fx0和Fy0为利用式(13)所求得的纯制动工况下的纵向力和纯转向工况下的侧向力;轮胎模型中的参数ai(i=1,…,8)可由实验数据来确定,所采用的数值如表1所示。
1.4 路面输入模型
采用一个滤波白噪声作为路面输入模型:

表1 轮胎模型参数

式中:G0为路面不平度系数;v为汽车行驶速度;wi为均值为零的高斯白噪声;f0为下截止频率;zi为路面位移。
2 基于FFRLS的质心位置估计方法
利用式(10)运用FFRLS方法来进行质心至前后轴距离lf和lr的动态估计。式(10)中的俯仰角加速度可通过陀螺仪测量得到,纵向加速度也可通过加速度传感器或油门和制动踏板行程得到。因此,仅需对前后悬架力Fsf和Fsr进行观测。
2.1 基于Kalman滤波的悬架力观测器设计

式中A,B和F为参数矩阵,可通过式(11)、式(12)和式(15)推导出,在此不再列出。
由式(12)可见,为观测到前后轴对应的悬架力,可选择系统输出为y=[,zuf,,zur,zsf,zsr],故其中系统状态观测矩阵C可表示为

另外,u=[usf,uur,ax]T,w=[wfwr]T,υ(t)为观测白噪声。
将式(16)通过欧拉积分离散化得到卡尔曼滤波器的系统方程:

假设w(k)和υ(k)都是零均值的高斯白噪声,且w(k)和υ(k)相互独立,则有

式中:Q(k)为过程噪声的协方差矩阵;R(k)为观测噪声的协方差矩阵。
假设系统状态初值x(0)与w(k)和υ(k)均不相关,线性离散系统卡尔曼滤波估计算法的具体推导过程[8-9]如下。
(1)预测估计

(2)预测估计的误差协方差矩阵

(3)卡尔曼滤波增益矩阵

(4)卡尔曼滤波估计

(5)卡尔曼滤波估计的误差协方差矩阵

式(21)~式(25)构成了卡尔曼滤波估计算法。通过建立系统初始时刻的状态x(0)和P(0),就可逐步递推出之后所有时刻的系统状态。在式(17)基础上应用卡尔曼滤波方法可对zsr进行观测并运用式(12)计算出前后悬架力估算值F^sf和 F^sr,代入式(10)就可得到质心到前后轴的距离估算值 l^f和 l^r。
2.2 基于FFRLS的估计算法与仿真
2.2.1 基于FFRLS的估计算法
对质心位置估计的算法流程为:由汽车静态下质心到前后轴的距离作为初始值,利用式(17)采用卡尔曼滤波的方法建立状态观测器,对系统的状态,z,,z,z,z进行观测,将观测得到的状态值ufursfsr代入式(12)计算 F^sf和 F^sr,再将它们和加速度传感器得到的俯仰角加速度和侧向加速度值代入式(10)中,利用FFRLS方法对质心位置进行估计,得到 l^f和 l^r,最后再将它们代入式(17)中,重复上述估计流程就可实现对汽车质心位置的动态估计。质心位置FFRLS估计算法的流程图如图4所示。

图4 质心位置FFRLS估计算法的流程图
驾驶员在驾驶汽车时,会根据道路前方情况适时做出相应的加减速操作,使汽车纵向加速度发生变化。在对质心位置进行估计时,可将纵向加速度的变化看成是一系列叠加在一起的脉冲噪声所构成的干扰信号。因此,式(10)可改写为

假设进行了N次观测,可将上式写成矩阵形式:
FFRLS方法的递推公式[10-11]为

式中:G(N+1)为递推增益;P(N+1)为协方差;λ为遗忘因子。λ越小对新数据加权越重,算法越能更好地跟踪参数的变化,但其值过小又会增加估计参数对干扰信号的敏感度,因此,一般在0.95~0.99范围内取值。
2.2.2 质心位置估计的仿真计算
将FFRLS方法在Matlab/Simulink环境中进行仿真,仿真时部分参数见文献[15]。为验证汽车在加减速行驶时质心位置的变化,仿真在式(15)的平坦路面模型上进行,车轮的轮缸压力变化如图5所示,在第3与第4s之间进行制动操作。遗忘因子λ取为 0.97,汽车模型静态时的 lf=1.26,lr=1.70。仿真结果与卡尔曼滤波方法所得结果的对比如图6和图7所示。
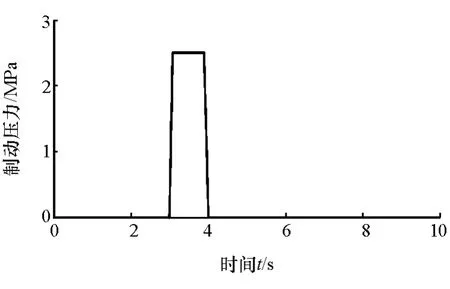
图5 轮缸制动压力曲线

图6 lf的估计值曲线

图7 lr的估计值曲线
由图可见,两种方法对lf和lr估计结果都能与参考值1.26和1.70很好吻合,但卡尔曼估计对3到4s时的制动基本上没有反应,说明基于FFRLS的方法具有更好的实时性,并且在制动时lf值减小,lr值增大符合质心前移的客观事实。从图中还可看出,制动时质心的前移量能达到0.1m左右,质心转移较大则会削弱汽车的操纵稳定性[12],因此,在研究汽车横向稳定性时,质心位置的变化不能忽略。
3 ESP参数自整定模糊PID控制器设计
为便于算法实现和保证实时性,采用计算量较小、易于微机实现的参数自整定模糊PID控制方法来设计ESP控制器。其设计思想是:找出PID 3个参数与偏差|e|及其变化率|ec|之间的模糊关系,通过测量计算|e|和|ec|,实现对PID参数进行在线调整,使被控对象具有良好的动态性能。
以横摆角速度和质心侧偏角作为汽车ESP控制器的控制参数,在质心侧偏角较小时,横摆角速度能很好反映汽车的行驶稳定性,而当车辆出现严重甩尾等侧滑现象时,车辆质心侧偏角较大且将会丧失转向能力,这时横摆角速度就不能较好表征行驶稳定性了。因此,当实际质心侧偏角低于其门限值时,执行横摆角速度控制算法,即以传感器测得的实际横摆角速度与理想横摆角速度的偏差绝对值|eωr|及其变化率绝对值|ecωr|作为模糊控制器的输入,将其3个输出作为PID控制器的参数,并将PID控制器的输出通过制动力分配方案作用在相应的车轮上,实现汽车的横向稳定性控制;反之,当实际质心侧偏角大于其门限值时,切换为质心侧偏角控制算法。ESP参数自整定模糊 PID控制系统如图8所示。

图8 ESP参数自整定模糊PID控制系统
期望横摆角速度和质心侧偏角由2自由度模型计算得到,该2自由度汽车模型中质心到前后轴的距离通过FFRLS方法估计得到,并考虑了路面附着情况对期望值的影响,使得到的期望横摆角速度和质心侧偏角的值更加符合实际情况。期望横摆角速度和质心侧偏角的求解方法见文献[15],在此不再赘述。其中进行横摆角速度控制所对应的PID控制器为 PID 调节器Ⅰ,KpΙ,KiΙ和 KdΙ为其对应参数;质心侧偏角控制时为 PID 调节器Ⅱ,KpΙΙ,KiΙΙ和 KdΙΙ为其对应参数。
在不同的偏差|e|及其变化率|ec|下,对PID控制器3参数的自整定规则总结如下:
(1)当|e|较大时,为具有较好的快速跟踪性能,应取较大的kp和较小的kd;同时为避免出现较大的超调,一般取ki为零;
(2)当|e|中等大小时,为具有较小的超调和较快的响应速度,应取较大的kp、适中的ki和kd;
(3)当|e|较小时,为具有良好稳态性能和避免在稳态值附近出现振荡,应取较大kp和ki;当|ec|较小时,kd一般取中等大小;当|ec|较大时,kd应取较小值。
对于横摆角速度控制算法,取实际与期望横摆角速度的偏差绝对值|eωr|及其变化率绝对值|ecωr|作为输入语言变量,每个语言变量的语言值模糊子集为{小,中,大},记为{S,M,B},且均采用三角隶属函数。
对模糊输入量,根据PID 自整定规则,将|eωr|与|ecωr|进行状态组合,记每种状态的隶属函数为μj( |eωr|,|ecωr|),j= 1,…,5。 根据测量计算得到的|eωr|和|ecωr|值计算 3 个 PID 参数[13-14]:
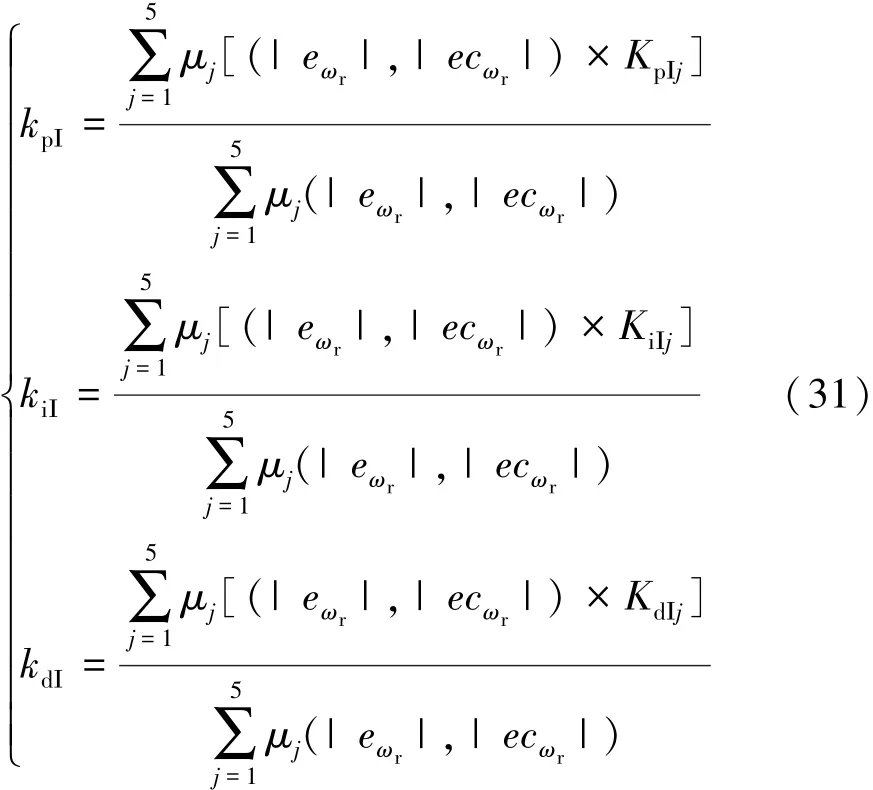
式中 KpΙj,KiΙj和 KdΙj(j= 1,…,5)为参数 kpΙ,kiΙ和 kdΙ在不同状态下的加权。
用在线自整定的 PID 参数 kpΙ,kiΙ和 kdΙ,就可按PID控制算法的离散差分公式计算输出控制uωr,即汽车稳定所需的附加横摆力矩:

质心侧偏角控制算法推导过程与横摆角速度控制算法相同,在此不再赘述。
4 仿真分析
将上述系统在Matlab/Simulink环境中进行仿真,其中部分参数见文献[15]。在Matlab/Simulink中建立汽车模型、ESP的参数自整定模糊PID控制器(图中记为PID控制)和基于FFRLS质心位置估计的参数自整定模糊PID控制器(图中记为修正后PID控制),该控制器能根据汽车的加减速运动来修正质心位置。
利用汽车在实际运动中容易失稳的急剧双移线工况作为仿真工况,并采用未控制、参数自整定模糊PID控制和进行质心位置修正的参数自整定模糊PID控制3种情况对比来验证该控制策略的效果。仿真车速为80km/h、路面附着系数为0.8高附着路面的仿真结果如图9~图11所示,路面附着系数为0.3的低附着路面的仿真结果如图12~图14所示。

图9 高附着路面横摆角速度仿真曲线

图10 高附着路面质心侧偏角仿真曲线

图11 高附着路面侧向加速度仿真曲线
图9 和图10分别为3种情况下高附着系数路面双移线工况下横摆角速度和质心侧偏角的对比曲线。由图可见,在对质心位置未修正与修正之后的PID控制中,横摆角速度的最大值分别为0.172和0.154rad/s,质心侧偏角的最大值分别为0.025和0.023rad,即与未对质心位置进行修正相比较,修正后的最大值减小,说明考虑质心位置变化的参数自整定模糊PID控制算法具有更好的控制效果。图11为高附着系数路面双移线工况下汽车侧向加速度的对比曲线。由图可见,未修正与修正后PID控制的最大值分别为3.41和2.83m/s2,即修正后PID控制的侧向加速度比未修正的PID控制有所减小,能明显减小汽车在高速转向时出现侧滑以至侧翻等极端失稳情况的可能性。通过上述仿真,说明了文中提供的控制算法是有效的,能改善汽车在高附着路面上以较高车速转向时的横向稳定性。
图12~图14分别为3种情况下低附着系数路面双移线工况下横摆角速度、质心侧偏角和侧向加速度的对比曲线。由图可见:在未进行汽车稳定性控制时,汽车因为侧滑而失去了稳定;而在对汽车进行控制时,未修正和修正后PID控制所对应的横摆角速度最大值分别为0.157和0.104rad/s,质心侧偏角最大值分别为0.029和0.020rad,侧向加速度最大值分别为2.58和2.19m/s2,即修正后PID控制的曲线最大值比未修正后PID控制的最大值均有所减小,说明考虑质心位置变化的参数自整定模糊PID控制算法具有更好的控制效果,能够有效提高汽车在低附着路面上以较高速转向时的横向稳定性。

图12 低附着路面横摆角速度仿真曲线
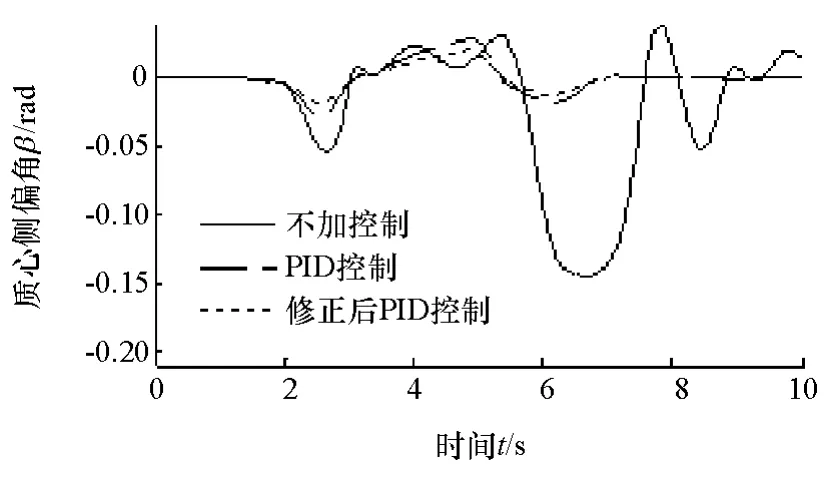
图13 低附着路面质心侧偏角仿真曲线

图14 低附着路面侧向加速度仿真曲线
5 硬件在环(HIL)试验
为验证本文中提出的ESP控制策略,建立了HIL试验系统,如图15所示。该系统由ESP控制器、实时仿真系统、试验用车和接口系统组成。

图15 HIL仿真试验系统
ESP控制器:硬件部分主要包括电源、轮速信号采集、ECU芯片、CAN信号采集、踏板信号采集、电磁阀和泵电机驱动等模块;软件部分的控制程序通过代码快速生成功能得到,在使用时对其进行了相应优化。
实时仿真系统:该系统基于 NI PXI与TESIS DYNAware软件,利用 TESIS DYNAware软件中的veDYNA模块,可建立精确的参数化车辆模型;NI PXI主机是一款高性能嵌入式控制器,性能相当于3.0GHz Pentium 4系统,能使在veDYNA中建立的车辆模型实时运行,从而构成HIL试验系统的实时仿真系统。
试验用车:一款装备有ESP系统的汽车,主要功能是将其液压系统和各种车载传感器作为HIL试验系统的硬件系统。
接口系统:采用SCB-68接线板,上有高速I/O口,能接受各种传感器信号,并将其传输给实时仿真系统中的车辆模型。
HIL试验方案:将开发的ESP控制器安装到HIL试验系统上,在虚拟试验场中进行双移线试验,试验过程中ESP控制器通过接口系统接收各种车载传感器信号来判断汽车运行状态,并根据相应的稳定性控制策略来对试验车进行控制。
试验首先对质心位置估计算法进行了验证,试验在虚拟平坦高附着路面上进行,汽车匀速行驶一段时间,踩下制动踏板,稳定一段时间,再迅速松开。将采集到的数据进行处理,得到的估计结果如图16和图17所示。

图16 lf的估计值
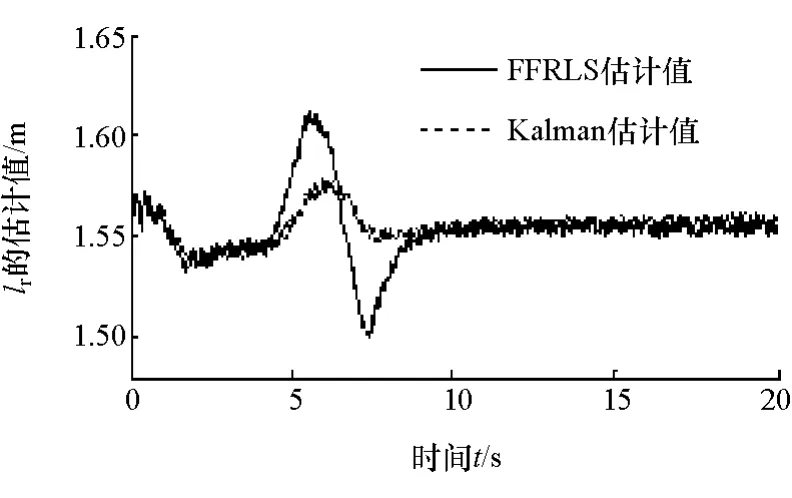
图17 lr的估计值
对稳定性控制策略验证试验分为3组:一组为不加控制;另一组为未对质心位置进行修正的PID控制;最后一组为对质心位置进行修正后的PID控制。
试验在虚拟的平坦路面上进行,车速设定为80km/h,进行附着系数为0.8的高附着路面和附着系数为0.3的低附着路面上的双移线试验,试验结果如图16~图23所示。
图16和图17分别为质心位置到前轴和后轴的距离通过FFRLS和Kalman两种算法得到的硬件在环试验估计值对比曲线。由图可见,当在第4s踩制动踏板时,FFRLS和Kalman两种算法的估计值由于载荷的前移,使得lf减小,lr增大,这与实际情况相符,且 FFRLS算法的估计值变化的更加快速,而Kalman算法的估计值变化不大,并且变化趋势缓慢,因此,硬件在环试验也说明FFRLS算法比Kalman算法具有更好的实时性,有助于提高汽车稳定性控制的控制性能。
图18~图20为高附着路面的试验结果。由图可见,当采用基于质心位置修正后的PID控制时,横摆角速度、质心侧偏角和侧向加速度的幅值比未修正的PID控制的幅值要小,说明在高速转向过程中,修正后的PID控制的汽车更能提高汽车的横向稳定性,防止汽车在急速转向时因失稳而产生激转或是偏离跑道。

图18 高附着路面硬件在环试验横摆角速度曲线

图19 高附着路面硬件在环试验质心侧偏角曲线

图20 高附着路面硬件在环试验侧向加速度曲线
图21 ~图23为低附着路面的试验结果。由图可见:未进行稳定性控制时,汽车同样失去了横向稳定性,发生了侧滑而激转的情况;但在对汽车进行稳定性控制时,汽车能够完成双移线测试,且基于质心估计的修正后PID控制比PID控制的曲线的幅值要小。说明在低附着路面上,本文中提出的稳定性控制算法也具有更好的控制效果,使汽车具有较好的横向稳定性。

图21 低附着路面硬件在环试验横摆角速度曲线

图22 低附着路面硬件在环试验质心侧偏角曲线

图23 低附着路面硬件在环试验侧向加速度曲线
质心位置的变化使汽车静态储备系数变化,最终导致汽车稳定性变差[16],由于本文算法中考虑了质心位置变化,通过上述硬件在环试验与仿真计算进行比较也可知,本文中的稳定性控制算法在改善汽车行驶中的横向稳定性有较好作用,能使汽车的横摆角速度、质心侧偏角和侧向加速度的幅值得到较为明显的降低,从而提高其横向稳定性。
6 结论
(1)本文中建立了考虑汽车纵向、侧向、横摆和侧倾的汽车模型和汽车垂向运动模型;利用传感器测得的俯仰角加速度和纵向加速度值由卡尔曼滤波方法得到的前后悬架力的估计值和运用FFRLS方法实现了对汽车质心位置的动态估计。
(2)在考虑了质心位置变化的基础上,运用2自由度模型计算期望的横摆角速度和质心侧偏角值,采用参数自整定的模糊PID控制方法设计了ESP控制器;最后对质心位置变化的ESP控制方法进行了仿真和硬件在环试验,结果表明该控制方法能改善汽车在转向行驶过程中的横向稳定性。
[1] NOURISOLA H,AHMADI B.Robust adaptive H controller based on GA-Wavelet-SVM for nonlinear vehicle suspension with time delay actuator[J].Journal of Vibration & Control,2015,22(20).
[2] RUBIN D,AROGETI SA.Vehicle yaw stability control using active limited-slip differential via model predictive control mthods[J].Vehicle System Dynamics:International Journal of Vehicle Mechanics and Mobility,2015,53:1-16.
[3] VAHIDI A,STEFANOPOULOU A,PENGH.Experiments for online estimation of heavy vehicle's mass and time-varying road grade[C].Proceedings of the 2003 ASME International Mechanical Engineering Congress and Exposition,Washington,2003:451-458.
[4] SADATI S H,et al.Optimal control of an 8-DOF vehicle active suspension system using Kalman observer[J].Shock and Vibration,2008,15(5):493-503.
[5] 包瑞新,贾敏,SABBIONI E,等.基于扩展Kalman粒子滤波的汽车行驶状态和参数估计[J].农业机械学报,2015,46(2):301-306.
[6] 王其东,黄鹤,陈无畏,等.基于自适应FFRLS的汽车前后轴侧偏刚度估计[J].机械工程学报,2012,48(12):110-117.
[7] PACEJKA H B.Tyre and vehicle dynamics[M].Oxford:Butterworth Heinemann,2002.
[8] 潘立登,潘仰东.系统辨识与建模[M].北京:化学工业出版社,2004.
[9] HAYKIN S.自适应滤波器原理(第四版)[M].郑宝王,等译.北京:电子工业出版社,2003.
[10] LJUNG L.System identification-theory for the user[M].Prentice Hall, Englewood Cliffs, NJ,1999.
[11] ZHOU Z.Characteristic parameters identification of characteristic models of linear time invariant systems[J].Journal of Systems Science & Mathematical Sciences,2010,30(30):6133-6138.
[12] 付江华,巢凯年,丁建明.质心转移对四轮转向汽车转向特性的影响[J].西华大学学报,2007,26(4):17-19.
[13] 章卫国,杨向东.模糊控制理论与应用[M].西安:西北工业大学出版社,1999.
[14] 曾光奇.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
[15] 陈无畏,张荣芸,赵林峰,等.运用Lyapunov指数方法的车辆横向运动混沌分析及其滑模变结构控制[J].中国科学:技术科学,2014(9):979-990.
[16] 余志生.汽车理论[M].北京:机械工业出版社,2009.
A Research on ESP Control with Mass Center Position Correction Using FFRLSMethod
Zhang Rongyun1, Chen Wuwei2, Shi Peicheng1, Zhao Linfeng2& Xiao Ping1
1.The School of Mechanical and Automotive Engineering, Anhui Polytechnic University, Wuhu 241000;2.The School of Automotive and Traffic Engineering, Hefei University of Technology, Hefei 230009
A vehicle model describing its longitudinal, lateral, vertical, yaw and roll motion as well as the rotation of four wheels is established.Kalman filter state observer is used to estimate the suspension forces of front and rear axles and forgetting-factor recursive least square(FFRLS)method is utilized to estimate the position of mass center,which is then used to correct the desired values of yaw rate and the sideslip angle of mass center obtained from reference model.Finally the parameter self-tuning fuzzy PID controller of ESP system is designed,and both simulation and hardware-in-the loop test are carried out.The results show that the control effects of ESP controller considering the change of mass center position is better than that without consideration,leading to better lateral stability during high-speed steering and braking of vehicle.
10.19562/j.chinasae.qcgc.2017.09.012
∗国家自然科学基金(51605003,51375131和51575001)、国家自然科学基金汽车联合基金(U1564201)和安徽工程大学引进人才科研启动基金(2016YQQ002)资助。
原稿收到日期为2016年7月12日,修改稿收到日期为2016年10月23日。
张荣芸,讲师,博士,E-mail:hanfengzhiwei@163.com。
