基于单轴陀螺仪和伺服电机的交通绘制机器人在生产生活中的应用
2017-10-10李敖
李敖
摘要:本文以研究机器人的路径规划为主要目标,研究一种基于单轴陀螺仪和伺服电机的路径规划机器人在交通领域中的应用技术。陀螺仪能提供实时角度信号,再结合伺服电机精确控制机器人的移动和动作,对机器人进行路径规划,并在生产生活中得到应用。目前生活中的很多领域涉及到路径规划的运用,如智能农机、保安机器人、家庭吸尘器等。
关键词:机器人;路径规划;伺服电机;陀螺仪;交通标识
本文提出的基于单轴陀螺仪和伺服电机的路径规划机器人在交通领域具有广泛应用前景,通过此机器人从事斑马线、行转标志、警戒线等交通标识的绘制工作具有可行性。
一、单轴陀螺仪
陀螺仪(gyroscope)是指敏感角速率和角偏差的一种传感器,其原理为角动量不灭的理论。陀螺仪主要是由一个位于轴心可以旋转的轮子构成,在动态中能保持相对跟踪状态。陀螺仪一旦开始旋转,由于轮子的角动量,陀螺仪有抗拒方向改变的趋向,能够用来感测与维持方向。所以陀螺仪常用作信号传感器,用于导航、定位等系统。
如图所示,轴的底部被托住静止但是能够各个方向旋转。当一个倾斜力作用在顶部的轴上的时候,质点A向上运动,质点C则向下运动,如其中的子图2。因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。CD两个质点的情况也是一样的。子图2中质点A当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。AC质点的组合将导致轴在子图3所示的运动平面内运动。一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。在子图4中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。C质点的向下运动现在受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。
实际上,轴在这个情况下将会在倾斜力的平面上旋转。轴之所以会旋转是因为质点AC在向上和向下运动的一些能量用尽导致轴在运动平面内运动。当质点AC最后旋转到大致上相反的位置上时,倾斜力比向上和向下的阻碍運动的力要大。
高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于垂直方向的倾向。而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。当轴平行于子午线而静止时可加以应用。
1、伺服电机。伺服电机(servo motor)是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服主要靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移。因伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。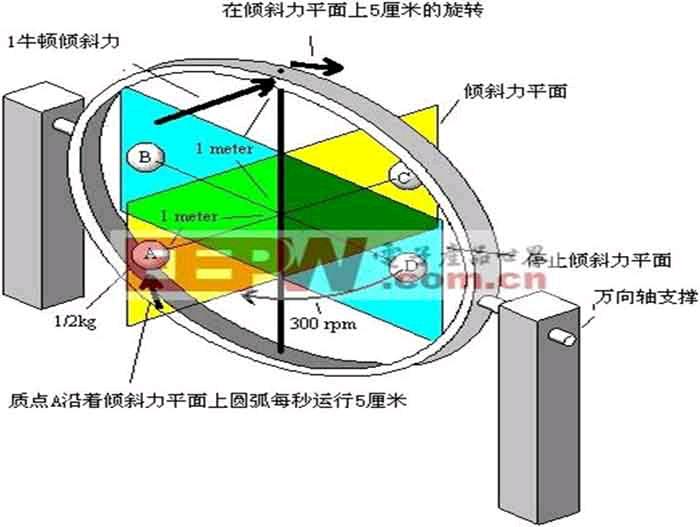
伺服电机的优点有:一、精度上实现了位置,速度和力矩的闭环控制;克服了步进电机失步的问题;二、抗过载能力强,能承受三倍于额定转矩的负载,对有瞬间负载波动和要求快速起动的场合特别适用;三、低速状态下运行平稳,低速运行时不会产生类似于步进电机的步进运行现象。适用于有高速响应要求的场合;四、电机加减速的动态相应时间短,一般在几十毫秒之内。还有,与其他电机相比较,伺服电机发热和噪音明显降低。
伺服电机主要运用于具有有动力源,而且对精度有要求的设备。如机床、印刷设备、包装设备、纺织设备、激光加工设备、机器人、自动化生产线等对工艺精度、加工效率和工作可靠性等要求相对较高的设备。
2、路径规划。路径规划(Path Planning)指移动机器人为实现某一功能搜寻一条从起始状态到目标状态的最优或次优路径,该技术是很多技术领域研究的热点,具有广阔的应用前景和科研价值。
二、机器人功能设计
此机器人的绘制功能主要体现在笔的移动。通过螺旋传动电机的运行使笔升降达到提落笔的功能,并通过编程对机器人进行路径规划,完成绘制交通标识的功能。多次实验证明:只要编程程序完整准确,该机器人能够在非极端环境下胜任绘制任何二维图形的工作。
1、机器人结构设计。该机器人主要由伺服电机、丝杠传动装置、移动底盘、单轴陀螺仪及万向轮组成。主要由行走、起落笔结构两部分组成。
第一,行走结构。该机器人的移动底盘为双驱动轮三点式行走结构,通过编程控制两驱动电机的转向及转速(转速差),使机器人沿着既定路线移动。此种结构稳定性好,而且节省空间,方便使用。
第二,起落笔结构。通过螺旋传动装置完成笔的提升下落功能,再加装弹簧使之适应地面,用如图示的夹持机构固定绘制工具(笔)。再由伺服电机控制精确,达到行驶既定路线完成绘制的功能。
第三,总体结构说明。交通绘制机器人主要由加装陀螺仪的双伺服电机行走底盘与伺服电机起落笔机构的配合完成绘制功能,总体在空间上呈三角形,结构坚固稳定,占地面积较少。
为了简代控制模型,我设计了绘制工具的轴线与两驱动轮轴线重点相交于一点的结构,使得机器人在绘制过程中的动作简单连贯,同时简化了路径规划算法和编程难度。
希望在不久的将来,该机器人出现在人们生活的方方面面,帮助人们解决许多问题。
参考文献
[1] 吕学诗.工业机器人在生产和生活中的应用[J].上海机械,1980(07):19-21.
[2] 郭磊,廖启征,魏世民.用速率陀螺仪实现基于单片机的角度随动系统研究——在自行车机器人的平衡控制中的应用[J].机电产品开发与创新,2005(02):11-13.endprint
