一种点阵面板显示缺陷检测方法
2017-09-29黄静文金晅宏
黄静文 金晅宏
摘 要:设计了一种图像缺陷检测算法,该算法将标准显示图像作为模板,将待测面板图像与模板图像进行比对,确定缺陷大小、位置。首先采用最小二乘法获取屏幕边界所在直线,用所得的4条直线作为角点,根据透视投影原理利用得到的4个角点进行图像几何校正,将校正后的模板和待测图像配准,最后将校正后的图像进行形态学处理,突出缺陷后将其与模板进行差模运算获取缺陷。其中,模板图像为标准显示图像经过与待测面板相同的校正、形态学处理后得到的图像。经试验检测,这种方法适用于多种显示模式,可以有效地检测出面板的显示缺陷。
关键词:缺陷检测;图像校正;点阵面板;最小二乘法;VFD面板
DOI:10.11907/rjdk.171346
中图分类号:TP317.4 文献标识码:A 文章编号:1672-7800(2017)009-0185-03
Abstract:An image defects detection algorithm is designed. The algorithm collected standarddisplay images as a template and then, compare the panel images with the template images to determine the defect size, location. At first, the least square method was used to detect straight lines in order to get the image boundary, then we used the four corners of the image to correct the image, ensure the basic alignment template and the image under test.At last ,we adjusted image morphology processing, highlighted the defect after comparing with the template for defects. The template image as a standard display images was processed as the panel under test after correcting and morphology processing. Experiments prove that this method is suitable for a variety of display mode and it can effectively detect the display detection.
Key Words:defects detection; image correction; lattice panel; the least square method; VFD panel
0 引言
VFD顯示屏即真空荧光显示屏,具有发光亮度高、可靠性强、寿命长、视角大等优点[1],因其可用低压进行驱动、易与集成电路配套等优点而被广泛应用于汽车、办公自动化设备、工业仪器仪表及家用电器等领域[2]。本文所研究的VFD点阵显示屏的主要显示缺陷为坏点缺陷,即存在显示错误的暗点或亮点。由于坏点较小,人工检测效率低下且存在主观判断,准确率低且没有稳定的标准。采用图像处理技术能有效提高检测效率,适应工业自动化生产的发展需要。在机器视觉检测中常采用两种方式,一种是采用特征提取方式,根据待测图像的图像特征来进行检测。这种方式对于不同显示模式提取不同的特征值,检测前要先确定好需要的特征,例如,可用直方图特征、骨架特征等进行检测[3-4]。另一种方式是采用模板匹配,将模板图像与待测图像进行图像匹配,这种匹配方式通常是通过相关性等进行匹配,适用于较大的缺陷[5-6]。
本文提出一种检测方式,经过图像几何校正,将待测图像与模板图像进行位置、形状上的配准,随后进行差影法处理,得到大致的缺陷图像,最后经过形态学处理后得到缺陷图像。此方法适用于多种显示模式,同时也能达到较高的检测精度,并通过实验结果与分析,证明了其可行性。
1 VFD 显示面板显示模式及缺陷分析
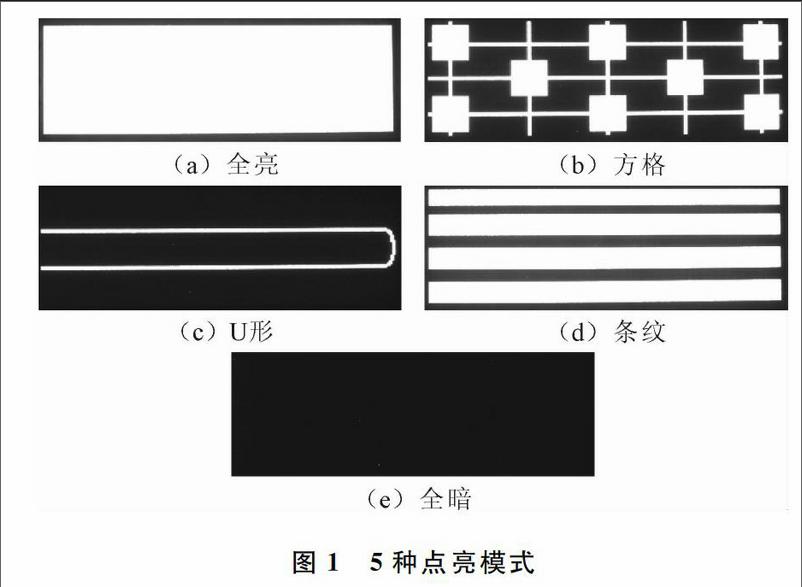
对 VFD 点阵面板进行点亮操作,5种点亮模式分别为全亮、方格、U形、条纹、全暗。图1为全部5种点亮模式下标准面板显示的图像。本文所检测的缺陷为点阵面板的显示缺陷,其主要可以分为两类:一类为亮点缺陷,即本不应点亮却点亮的点;一类为暗点,即本应点亮却未点亮的点。规定直径大于0.5mm的坏点为缺陷点,实际试验中,采集的图像每个缺陷点直径约为3个像素。
2 显示缺陷检测算法
2.1 图像几何校正与配准
缺陷检测前,由于采集到的是灰度图,首先对图像采用最大类间方差法[7]进行二值化处理,随后对获得的二值化图像进行分析。由于采集图像时面板本身或相机不可避免地存在一定的倾斜,为方便检测,所采集到的图像需要进行校正。5种点亮模式中,全亮模式对于检测感兴趣区域与得到几何校正的变换矩阵最为方便。得到全亮模式下变换矩阵后保持面板与摄像头不再移动,将同一块面板几种点亮模式下采集到的图像均乘以全亮模式下的变换矩阵即可配准全部点亮模式下的面板图像。配准前首先通过选取最大连通域所在最小矩形的方式获得一个感兴趣区域,以此区域作为掩模,与二值化后的图像进行点乘运算,通过该处理后所得到的图像只包含所需检测的面板区域图像。为减少计算量,此处可对图像进行一定的裁剪,本文中此处在最小外接矩形各边缘向外多截取20个像素。
2.1.1 基于最小二乘法的直线边缘提取endprint
本文中的校正算法需要获取屏幕边缘所在直线。为获取屏幕4条边所在直线,首先需要得到4条边上点的位置信息。以获取上边缘线为例,按从左向右、从上到下顺序读取图像每个点的值, 记录每一列扫描到的第一个亮点的坐标值,得到的一组数据为面板上边缘点的坐标。由于面板本身存在小角度倾斜,所得到的点并不仅仅是上边缘点,还存在其它边缘点,为降低这些点在直线拟合时的影响,处理数据时仅采用这组数中的中段,选取的数据长度与倾斜角有关。同时为避免部分缺陷点影响,对提取的这部分数据再进行一次中值滤波。由于每个面板上的点在采集到的图像中约占3个像素,滤波窗口大小取5。中值滤波后的4组数据分别用最小二乘法进行直线拟合,得到4条直线。
最小二乘化是一种常见的直线拟合方式,其基本原理是通过最小化误差的平方和找到一组数据的最佳函数匹配,从误差拟合角度对回归模型进行参数估计或系统辨识,在参数估计、系统辨识以及预测、预报等众多领域中得到极为广泛的应用[8]。假设一组点所在直线为AX+B=0,根据最小二乘法求出:A=1C∑nk=1(Xk-X)(Yk-Y)
(1)
B=Y-AX
(2) 其中,C=∑nk=1(Xk-X)2,由此可以得出该直线。
2.1.2 基于透视投影的几何校正
透视投影属于中心投影,透视投影图简称为透视图或透视,它是从某个投射中心将物体投射到单一投影面上所得到的图形。拍摄图像时,由于摄像机的拍摄视角会导致一定的畸变,本文所检测图像中存在的主要畸变即为透视投影所带来的畸变。二维图像通过透视变换的过程可以表示为式(3)、式(4),其中,(x,y)为原始图像上某一点的坐标,(u,v)为该点透视变换后的坐标,a、b、c、d、e、f、l、m、n为变换矩阵的参数[9]。u=ax+by+clx+my+1,v=dx+ey+flx+my+1
(3) 式(3)可表示成矩阵:A=HB
(4) 式中,A为变换后点的坐标,B为图像原坐标,H为变换矩阵。透视变换对畸变图像的校正需要得到畸变图像的一组4个点的坐标,和与之相对应的目标图像的4个点的坐标,通过代入这两组共8个坐标可以计算出透视变换的变换矩阵H,之后对整个原始图像执行变换矩阵的变换,就可以实现图像校正。上一步骤中,4组数据直线拟合后取得了4条直线方程,两两联立可得到4个交点坐标,将其作为屏幕角点。由已知屏幕的实际长宽,得到实际4个角点目标位置,4个交点与4个目标位置一一对应,可以求出变换矩阵[10]。文献[9]中给出了一种具体的计算方式,本文直接采用Matlab函数库中的maketform函数代入8个点坐标进行此处的运算得到变换矩阵。最后将原始图像乘以得到的变换矩阵即可得到校正后图像。
2.1.3 配准
校正后所得图像中,待检测部分即显示屏所在位置与模板所在位置不一定相同,在校正后需要进行配准才能进行下一步操作。具体配准步骤如下:①检测校正后得到的二值图像,获取最小外接矩形;②对图像进行裁剪,截取该最小外接矩形部分,为方便观察,在各边缘向外多截取了3个像素的图像;③对其进行缩放,统一图像大小。
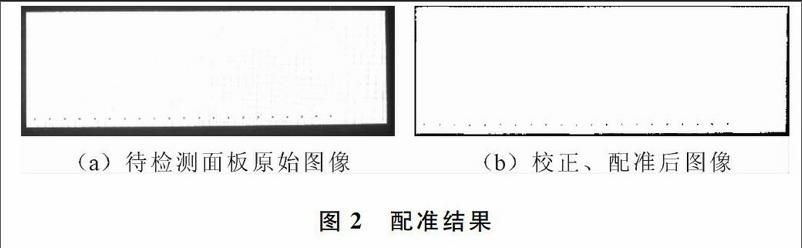
图2为一块含有暗点缺陷面板全亮显示模式下校正、配准后图像,图2(a)为待检测面板原始图像,图2(b)为配准后图像。
2.2 缺陷检测显示
理想情况下,坏点大小至少为3*3像素,但采集图像时因为外界因素干扰,坏点可能并不明显,需要进行相应的形态学处理[11]。此处形态学处理根据所检测坏点不同分为两种:检测亮点时,此处进行膨胀处理;检测暗点时,此處进行腐蚀运算。选取一幅正常图像作为模板,校正后也进行相同的形态学处理,随后对应的图像进行差模运算。校正后得到的图像由于二值化、图像校正及拍摄本身的影响不会与模板完全相同,但误差相对较小,再次进行开运算可排除误差带来的影响。开运算还能将图像中存在的一些较小的噪声点滤除,尺寸过小的噪声点不会被误判作缺陷点,只有最大直径大于或等于3个像素的点才能被判定为缺陷点。本文采用disk形直径为5的结构元素进行膨胀处理,处理结果如图3所示,可以看出,左上角处的亮点缺陷可以被检测出。这种配准方式虽然不能达到与模板的完全匹配,但并不影响检测出缺陷点。
对于暗点,检测过程与亮点检测过程基本相似,只是在形态学处理时选择腐蚀运算而非膨胀运算。检测时,首先将待测图像进行校正与ROI提取,随后进行腐蚀运算,增强缺陷,最后将经过其与模板图像进行异或得到的结果再进行开运算,得到最终暗点图像。其中,模板为标准面板经过校正、ROI提取、开运算后得到的图像。缺陷图像与模板进行异或操作后腐蚀得到的图像上只含有缺陷点,由此可以通过计算结果图中连通域的大小、数目、位置等获取缺陷点数目、位置信息,并以此判断面板的合格与否。
带暗点缺陷的面板图像处理结果如图4所示。
将整体检测算法进行总结如下:①将全亮模式下采集到的待检测图像进行4个方向的投影、滤波,选取每组数中段部分的点进行最小二乘化拟合,求出4条边缘所在直线;②求所得4条直线的4个交点,将其作为角点得到变换矩阵,进行几何校正,并保存此处变换矩阵;③改变点亮模式时面板相机均不移动,可将同一块面板几种点亮模式下采集到的图像均乘以全亮模式下的变换矩阵,获得校正后图像,配准后进行形态学处理和缺陷检测。
实验结果表明,利用这种算法可以迅速有效地进行点阵面板的缺陷检测,只需在固定显示器和摄像头前提下拍摄不同模式下的图片,并利用不同显示模式下的模板,即可用一种算法解决多种显示模式下的缺陷检测。
3 结语
针对VFD点阵面板,本文通过最小二乘法获取显示屏边缘所在直线进而获得角点,基于透视投影的几何校正对图像进行配准;随后,将配准好的图像与模板图像进行差模运算,并通过形态学处理去掉其中误差因素影响获取坏点图,能快速准确地进行较小型坏点的识别与定位。该方法检测精度可达3个像素,解决了人工检测效率低、漏检率高的问题,满足点阵面板显示缺陷检测的基本要求。
参考文献:
[1] 张建平,赵威,戴咏夏.真空荧光显示器亮度特性的研究[J].液晶与显示,2010,25(1):40-48.
[2] 阮世平.高性能真空荧光显示器(VFD)开发和应用[J].光电子技术,2005,25(4):211-217.
[3] 吴军.车载DVD控制电路板VFD显示屏缺陷检测技术的研究[D].南京:南京理工大学,2007.
[4] 王业翔,戴曙光.基于LabVIEW的VFD视觉检测技术研究[J].电子科技,2015,28(8):157-163.
[5] 刘延允.面向OLED显示屏的缺陷检测算法研究与系统开发[D].广州:广东工业大学,2011.
[6] 徐炜东,郭斌,张永超,等.液晶屏字符显示缺陷检测算法研究[J].中国计量学院学报,2014,25(2):139-143.
[7] 王耀南.计算机图像处理与识别技术[M].北京:高等教育出版社,2001.
[8] 邹乐强.最小二乘法原理及其简单应用[J].科技信息,2010,2(23):282-283.
[9] 代勤,王延杰,韩广良,等.基于改进Hough变换和透视变换的透视图像矫正[J].液晶与显示,2012,27(4):552-556.
[10] 吴柏雄.基于矩形角点几何变换的畸变图像校正[J].计算机与数字工程,2009,37(11):152-154.
[11] 何东建.数字图像处理[M].第1版.西安:西安电子科技大学出版社,2003.
(责任编辑:孙 娟)endprint
