非线性干扰观测器的高超声速飞行器鲁棒反演控制
2017-09-12王鹏飞时建明贾英杰
王鹏飞,王 洁,时建明,贾英杰
(空军工程大学防空反导学院,西安 710051)
非线性干扰观测器的高超声速飞行器鲁棒反演控制
王鹏飞,王 洁,时建明,贾英杰
(空军工程大学防空反导学院,西安 710051)
针对高超声速飞行器控制系统设计,提出一种基于干扰观测器的鲁棒反演控制器设计方法。采用反演控制方法分别设计速度和高度控制器。引入滑模微分器设计虚拟控制量的导数求解器,避免了传统反演控制“微分项膨胀”问题。为增强控制器的鲁棒性,设计一种非线性干扰观测器对模型不确定项进行自适应估计和补偿。通过数值仿真表明,该控制器能够保证对速度和高度参考输入的稳定跟踪。
高超声速飞行器,反演控制,干扰观测器,滑模微分器
0 引言
高超声速飞行器一般是指采用超燃冲压发动机和机体/发动机一体化设计技术、具备在临近空间以大于5个马赫数飞行的一类有动力的高超声速飞行器[1],其具有远程高超声速巡航与突防、空天往返的应用背景。高超声速飞行器采用机体/发动机一体化设计,机身大量使用轻薄材料,这种特殊的构型设计使得在控制系统设计中必须考虑空气动力学/推进系统/结构动力学/气动热力学之间的交叉耦合效应[2-3]。此外,显著的弹性效应和复杂的飞行环境也使得飞行器模型中存在各种不确定性。这些都给控制器的设计带来了巨大挑战。
反演设计方法为控制理论在控制系统中的应用搭建了桥梁,该方法已经成为高机动飞行器控制系统的主流设计方法[4-6]。文献[7]基于反演方法实现了对一类通用临近空间飞行器纵向模型的非线性控制,有效避免了非线性控制中的Hamilton-Jacobi-Isaacs不等式求解问题,实现了对参数不确定性和外界未知干扰的有效抑制。文献[8]采用反演和动态逆方法设计控制器,利用模糊自适应系统在线辨识模型不确定性,克服了单纯反演控制鲁棒性差的问题。
观测器常用于实现对系统不确定项和外部干扰估计或逼近,可视为一种增强控制器鲁棒性的补偿机制,因此,常将其与其他控制方法相结合,提高控制系统的鲁棒性。文献[9]基于小扰动线性化方程设计了比例积分型状态观测器,但由于将飞机运动采取纵横分离的方式进行处理,因此,具有一定的局限性。文献[10-11]分别设计了一阶滑模观测器,其中,文献[10]基于简化模型和近似计算给出了滑模观测器的收敛条件,但是结果具有一定的保守性;文献[11]通过对观测器误差方程状态估计量处的线性化展开,给出了滑模观测器的收敛条件,但是由于观测器增益是状态估计的函数,所以对观测器增益进行取值很困难,甚至并不能保证一定存在使观测器稳定的观测器增益。
由于目前高超声速飞行器控制相关研究主要集中于纵向平面内,且同时考虑纵向和横向控制问题过于复杂,因此,本文研究存在外界扰动的高超声速飞行器纵向平面控制问题。将模型气动参数拟合误差、弹性形变引起的机体攻角和升降舵偏角摄动以及弹性状态对刚体状态的影响转化为有上界不确定干扰问题。引入滑模微分器设计虚拟控制量的导数求解器,避免了传统反演控制“微分项膨胀”问题。为增强控制器的鲁棒性,设计一种基于滑模微分器的非线性干扰观测器(Nonlinear Disturbance Observer,NDO)对模型不确定项进行自适应估计和补偿,提高控制精度。最后,通过数字仿真对所设计控制器的有效性进行验证。
1 高超声速飞行器建模与控制问题描述
1.1 纵向运动学模型
定义飞行器刚体动力学系统状态量x=[V,h,γ,α,Q],其中:V和h分别为飞行速度和高度;γ和α分别为航迹角和迎角;Q为俯仰角速度。飞行器的动力学方程为[12]

式(1)中:m为飞行器质量;Iyy为飞行器转动惯量;μ和RE分别为地球引力常数和地球半径;zT为推力相对于质心的力臂;T为推力;D为阻力;L为升力;M为气动俯仰力矩;η为弹性状态量,ζi和ωi分别为第i阶弹性模态的阻尼系数和自然频率;Ni为第i阶广义弹性力。
采用基于曲线拟合的思想,将推力、气动力和俯仰力矩表示成飞行状态量及控制系统输入量相关的多项式形式。将T,D,L以及M表示为虚拟控制量和控制量的非严格仿射形式。

式中,q为动压;S和c分别为参考面积和平均气动弦长;Ma为马赫数;ρ0为参考高度处的大气密度;h0为参考高度,hs为参考高度处的高度常数。
将机身的弹性振动视为扰动,则弹性扰动可定义为:

则式(1)可转化为如下严格反馈形式。


2 控制器设计及稳定性分析
2.1 速度控制器设计

设计控制量Φ为


2.2 高度控制器设计


为避免虚拟导数计算膨胀问题,引入一阶滑模微分器[14]对的一阶导数进行精确估计。




定义虚拟导数的估计误差
根据滑模观测器的性质[14]可知,通过选择合适的设计参数,可保证估计误差和有界,定义常数满足。


2.3 干扰观测器设计
为提高控制系统的鲁棒性以应对不确定性干扰,基于滑模微分器设计一种非线性干扰观测器对模型中的不确定项进行精确的估计,其形式如下:

2.4 稳定性分析
选择Lyapunov函数为:

其中

对式(29)求导可得:
由于
则式(29)可改写为:
其中


如果所有的跟踪误差x在紧集Ωx之外,其中,则。此时,所有的误差信号均是有界的。
3 仿真分析
针对高超声速飞行器原理模型进行闭环系统仿真,飞行器的几何参数见文献[15]。飞行器在高度为25 908 m,速度为2 331.7 m/s的初始巡航条件下,要求跟踪经过阻尼比为0.95,自然频率为0.03 rad/s的二阶环节平滑处理的高度和速度阶跃指令,指令幅值分别为3 048 m和304.8 m/s。
为表明所设计的干扰观测器对控制器的影响,将有无干扰观测的结果进行对比,其中下标“0”表示无观测器,下标“1”表示有观测器。仿真结果如下页图1~图6所示。从仿真结果可以看出,在不存在干扰观测器的情况下,建模误差界估计过程良好且最终达到稳定,在基于建模误差界估计的控制器作用下,系统在300 s的时间内能稳定跟踪给定的指令,系统状态量都能趋于另一平衡状态,控制有界稳定且具有良好的动态品质。当加入干扰观测器之后,控制器能够更好地消除模型的不确定性及弹性振动对控制精度的影响,加快了状态量的收敛速度,获得了更好的控制效果。
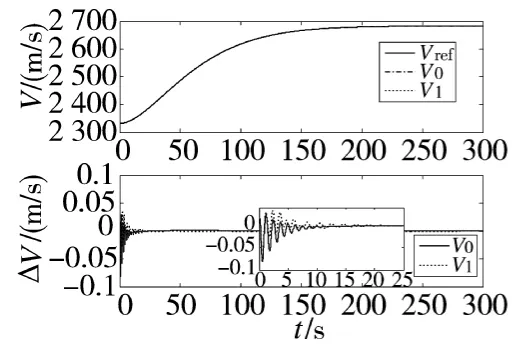
图1 速度及速度跟踪误差

图2 高度及高度跟踪误差

图3 控制量

图4 航迹角

图5 迎角指令

图6 俯仰角速度指令
4 结论
本文针对高超声速飞行器纵向平面内的弹性体模型,设计了一种基于非线性干扰观测器的反演控制器。将模型气动参数拟合误差、弹性形变引起的机体攻角和升降舵偏角摄动以及弹性状态对刚体状态的影响转化为有上界不确定干扰问题。引入滑模微分器设计虚拟控制量的导数求解器,避免了传统反演控制“微分项膨胀”问题。设计一种非线性干扰观测器对模型不确定项进行自适应估计和补偿,增强了控制器的鲁棒性。仿真结果表明,所设计控制器在保证刚体状态稳定的同时,能够较好地抑制机体弹性振动,实现对速度和高度参考输入的高精度稳定跟踪。
[1]MARSHALLLA,BAHMC,CORPENING G P.Overview with results and lessons learned of the X-43A Mach flight[C]//Proceedings of AIAA/CIRA 13th International Space Planes and Hypersonic Systems and Technologies Conference.Reston,VA,USA:AIAA,2005:1-23.
[2]HU X X,WU L G,HU C H,et al.Adaptive sliding mode tracking control for a flexible air-breathing hypersonic vehicle [J].Journal of the Franklin lnstitute,2012,349(2):559-577.
[3]ZINNENKER A,SERRANI A.Combined reference governor and anti-windup design for constrained hypersonic vehicles models[R].AIAA,2009-6283.
[4]GAO D,SUN Z,LIU J.Dynamic inversion control for a class of pure-feedback systems [J].Asian J.Control,2012,14(2):605-611.
[5]GAO D,SUN Z,XU B.Fuzzy adaptive control for pure-feedback system via time scale separation [J].Int.J.Control Autom Syst,2013,11(1):147-158.
[6]XU B,HUANG X Y,WANG D W,et al.Dynamic surface control of constrained hypersonic Bight models with parameter estimation and actuator compensation[J].Asian J Control,2014,16(1):1-13.
[7]宗群,吕力.基于Backstepping的临近空间飞行器非线性控制[J].控制工程,2012,19(5):860-869.
[8]高道祥,孙增圻,罗熊,等.基于Backstepping的高超声速飞行器模糊自适应控制[J].控制理论与应用,2008,25(5):805-810.
[9]LEI Z D,YANG J P,ZHAO Y.Sensor fault tolerance control of a flexible air-breathing hypersonic flight vehicle[J].Aeroweaponry,2012,2(1):3-8.
[10]XU H J,MIRMIRANI M D,IOANNOU P A.Adaptive sliding mode control design for a hypersonic flight vehicle[J].Journal of Guidance,Control,and Dynamics,2004,27(5):829-838.
[11]CHEN J,ZHOU Z,SONG Z.Nonlinear modelling and open-loop dynamic characteristics for hypersonic aircraft[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(7):827-832.
[12]BOLENDER M A,DOMAN D B.Nonlinear longitudinal dynamical model of an air-breathing hypersonic vehicle[J].Journalof Spacecraft and Rockets,2007,44(2):374-387.
[13]XU B,HUANG X,WANG D,et al.Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation [J].Asian J.Control,2014,16(1):162-174.
[14]LEVANT A.Higher order sliding mode,differentiation and output feedback control[J].International Journal of Control,2003,76(9):924-941.
[15]FIORENTINI L.Nonlinear adaptive controller design for air-breathing hypersonic vehicles [D].Columbus:the O-hio State University,2010.
Robust Backstepping Control for Hypersonic Vehicles Based on Nonlinear Disturbance Observer
WANG Peng-fei,WANG Jie,SHI Jian-ming,JIA Ying-jie
(School of Air and Missile Defense,Air Force Engineering University,Xi’an 710051,China)
A nonlinear disturbance observer based on robust backstepping controller is designed for hypersonic vehicles.Based on backstepping control method,velocity and altitude controllers are designed respectively.The sliding mode differentiators are introduced to obtain the derivatives of virtual control laws,which avoids the explosion of differentiation teens in the traditional backstepping control.In order to enhance the controllers’robustness,a nonlinear disturbance observer is introduced to estimate and compensate the model uncertainties.Reference trajectory tracking simulation shows the effectiveness of this controller in tracking velocity and altitude commands.
hypersonic vehicles,backstepping control,disturbance observer,sliding mode differentiator
TP273;TJ866
A
10.3969/j.issn.1002-0640.2017.08.028
1002-0640(2017)08-0123-05
2016-06-19
2016-08-13
王鹏飞(1988- ),男,河南开封人,博士研究生。研究方向:非线性控制理论。
