日本开发新型水下机器人调查福岛核事故
2017-09-03李忠东编译
李忠东 编译
日本开发新型水下机器人调查福岛核事故
李忠东 编译
留下严重后遗症
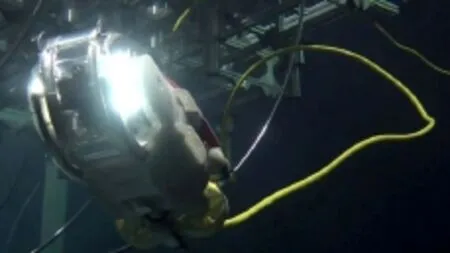
6月1 5日,由日本东芝公司(Toshiba)和“国际反应堆报废研究开发机构”(IRID)共同开发的一款新型水下机器人研制成功,在神奈川县横须贺市公开亮相。按照计划,它接受操作员的培训后,将在福岛第一核电站3号机组内投入实际使用。2011年“3·11大地震”引发核泄漏事故后,福岛第一核电站1至3号机组发生堆芯熔化,即反应堆内压力容器中的核燃料棒失去冷却后迅速升至极高温度而熔毁,并从压力容器的底部泄漏到外面一层安全壳的底部。1至3号机组目前仍然通过持续注水进行冷却,安全壳底部存有大量积水,其中3号机组安全壳的内部水深达6米。堆芯熔化后的核残渣存在于水下,有待调查。这款新型水下机器人正是以福岛第一核电站为假想使用场景而研究开发的,希望通过水下调查了解安全壳的内部状况,为最终确定核残渣取出方案收集必要的信息。
迄今为止,日本福岛核事故遗留的核污水、报废核反应堆以及除污等问题都没有得到有效解决。2016年日本国内环保组织的独立调查结果表明,尽管核事故过去5年多,福岛核电站附近海底的放射性物质浓度最高值却是事故发生前的数百倍。面对这场21世纪的“海上切尔诺贝利”,日本政府及当事企业东京电力公司先是低估严峻形势,设计了一套完全不能有效控制局面的事故处理方案,致使核泄漏范围不断扩大,程度加深,次生事故接连发生。由于福岛核事故处理的巨大难度,该事故即使到2020年也仍然难以彻底结束。
多台机器人失败
多项调查显示,福岛第一核电站内的损坏情况可能比预期的更糟糕,去污过程预计将持续数十年。东京电力公司曾接连投放机器人,调查取证辐射值和受损状况,然而却“损兵折将”,进展并不顺利,多台机器人损毁在安全壳内。电力公司认为,机器人故障可能与超高辐射有关。
1月16日,东京电力公司曾向2号机组派遣了一个量身定做、配备摄影镜头的自走式“蝎形”机器人,但它没能如期抵达压力容器下方,“折”在半路上。当时,这个装有相机和辐射测量仪的机器人被障碍物卡住,一点也不能动弹。远程操控机器人的工作人员经过分析得出两个原因:一是熔化的燃料棒和因地震损毁的设备部件阻碍了机器人前进;二是机器人抗辐射能力差。
调查人员原来预计“蝎形”机器人能抵抗73希沃特(辐射剂量的一种单位,以下简称Sv)的辐射,坚持工作10个小时。但反应炉辐射量高达530Sv,它在两小时内承受的辐射量便达到上限,随后陷入瘫痪。在此之前,东京电力公司曾在1号机组内派送过一个未能收回的机器人。他们打算再次向2号机组安全壳的内部投放一个水下机器人,以便摸清熔化的燃料棒的具体方位和2号机组结构性受损状况,然后决定采取何种除污方法。
希沃特是(Sv)是一个用来衡量辐射剂量对生物组织影响程度的单位,人们日常生活中接触到的辐射剂量都在0.05微Sv左右。接触的环境只要维持在0.2微Sv以下都是正常可接受的,如果超过20微Sv就属于危险级别。1Sv的剂量足以造成暴露者辐射,出现恶心症状,暴露于5Sv下会使得半数人1个月内死亡。10Sv剂量则会让暴露者数周内丧命。
福岛第一核电站去污事宜负责人增田尚宏希望,有关机构在研发机器人过程中投入更多的“创意”,使机器人终能“不辱使命”。他指出:“我们应该打破陈规,这样才能抵达事故现场的核心进行调查取证,查明熔化的核燃料蔓延至何处。”
新型机器人的研发
东京电力公司2015年10月进行的一项调查中发现,3号机组的安全壳淹没在6米深的冷却水里。安全壳侧面的穿越孔直径仅有14 厘米,致使检查安全壳内部的机器人行动受到限制。这次由Toshiba与IRID联合开发的新型螺旋桨驱动的水下机器人从实际出发,长度大约30厘米,直径13厘米,可通过安全壳侧面的穿越孔,利用前后方配备的摄像头拍摄内部情况。大量燃料已经熔落的3号机组内部状况尚未被掌握,科研人员希望能够通过该机器人准确得到安全壳内部损坏的完整影像,从而制定熔融燃料的回收计划。
新型水下机器人重量约2公斤,为圆筒状,通过后部和上部多个螺旋桨的驱动,可用线缆远距离操控。利用后部伸出的电缆供电和通信,每次前进30米左右,续航时间为约10~20小时。它前后均配置相机和LED灯,可拍摄上下各90度范围。



超强核辐射环境不但是人类的禁区,而且对普通的工程机器人也一样。在这种恶劣危险的环境里,一般机器人的金属材料外壳会被活化,橡胶等普通材料加速老化,控制传输的电子设备失效,甚至摄像镜头的玻璃都会变成“墨镜”。这款新型水下机器人不但小巧玲珑,行动自如,而且可承受65°C高温,具备抗200Sv的辐射能力。
新型水下机器人并非简单地选择耐辐射材料制造,而是更多地通过合理设计规划机器人各功能区,科学分布设计电路。并且运用传感器主被动加固等综合技术,达到总体耐辐射。为掌握高辐射环境下的现场情况,该套机器人拥有目前世界最高水平的耐辐射摄像机,可以在最高每小时100Sv核辐射的环境中工作,并向外界传回200万~500万像素的高清图像。另外,它能够完成高辐射环境下的无线数据传输,帮助远程工作人员控制机器人,从事各种应急处置工作,如采集核辐射计量、温度、湿度等现场信息等。除了处理应急事故,这款新型水下机器人在核电站日常维护、维修、数据收集、数据勘测等领域都将发挥重要作用。
