基于UG的钩臂车钩臂的静力学分析
2017-09-03牟江涛1王斌2
牟江涛1 王斌2
MOU Jiang-tao et al
1. 山东五征集团有限公司 山东日照 262306 2. 汉阳专用汽车研究所 湖北武汉 430056
基于UG的钩臂车钩臂的静力学分析
牟江涛1 王斌2
MOU Jiang-tao et al
1. 山东五征集团有限公司 山东日照 262306 2. 汉阳专用汽车研究所 湖北武汉 430056
为优化钩臂车钩臂装置的性能和质量,采用UG软件建立钩臂装置的数模,并对其进行有限元静力学分析。通过简化模拟钩臂装置的工作状况,对其进行受力分析,并根据钩臂的材料属性建立有限元分析模型,分析其变形和应力分布情况,对钩臂的结构优化和安全工作提供了理论支持。
钩臂装置 UG软件 有限元模型 应力 应变
1 前言
车厢可卸式垃圾车又称为钩臂式垃圾运输车,广泛应用于城市、乡镇、街道、农村、学校等生活垃圾的收集、转运和处理。其中,钩臂装置作为垃圾车的关键部件,其性能的好坏直接影响着整车的性能,因此,研究钩臂装置的性能,并对其进行优化设计具有重要的意义。
在UG NX系统的高级分析模块中,可以实现相关零部件的静力学分析。UG的前处理功能比较强大,在高级分析模块中可以直接转化成有限元模型并对模型进行简化;与其他CAE软件相比,此软件不需要进行模型的二次转换,不仅可以提高工作效率,还可增加模型本身的正确率,为后续分析提供更加可靠的支持[1]。
本文以钩臂车的钩臂装置为研究对象,利用UG软件建立钩臂装置的静力学模型,并对其进行静力学分析,通过分析应力、应变的分布情况,不仅证明了结构的可行性,也为相关设计工作提供了依据。
2 钩臂的静力学模型
钩臂装置是钩臂车的重要组成部分,其中上端部分连接拉钩,钩起可移动式垃圾箱,下端部分连接滑臂装置,借助滑块装置实现滑移,从而调节钩臂的长度实现对垃圾箱的挂接[2]。因此对钩臂装置进行静力学分析,得到在不同工况下的应力、应变云图,为其机械结构的设计提供了依据。图1为钩臂车的钩臂模型。

图1 钩臂模型
3 前处理
在对模型进行有限元分析前,需要对模型进行简化。经过简化后的模型有利于网格划分,提高分析精度,缩短求解时间[3]。对模型简化时应遵循以下原则,保留原模型的关键特征和用户认为需要分析的特征,对一些外观性的特征可以适当进行简化,如小孔、圆角等。
由于钩臂装置本身是焊接而成,在进行网格划分之前需要对焊缝进行处理,在此模型中采用ID连接中节点的连接方式实现焊缝的处理,此过程比较麻烦,耗费时间较长,这样对焊缝进行处理后,可以保证与原始模型焊接性能的相似性。
3.1 添加材料
在对模型进行分析之前需要设置模型的材料。钩臂装置的材料为Q345B,厚度为8 mm,部分加强筋的厚度为6 mm。在高级仿真工具栏中的材料属性中,指派零部件的材料属性。材料指标如表1所示。
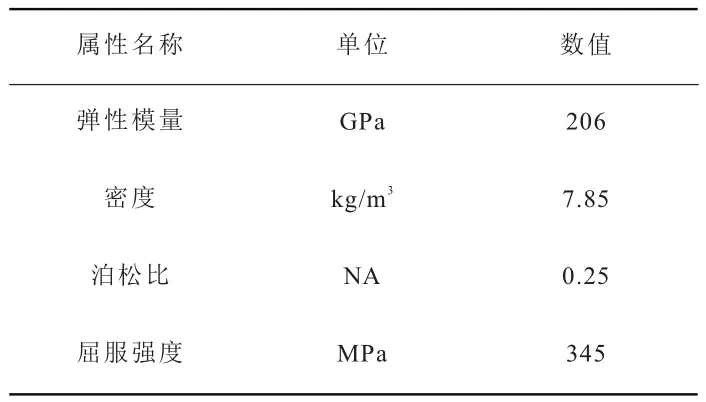
表1 Q345B材料指标
3.2 网格划分
网格划分是有限元分析的关键步骤,网格划分的好坏直接影响有限元分析的精度[4]。UG NX中网格类型包括零维网格、一维网格、二维网格、三维网格和连接网格五种类型。在本模型中大部分采用二维网格,对于关键部位采用三维网格进行划分。划分完成之后的网格如图2所示。
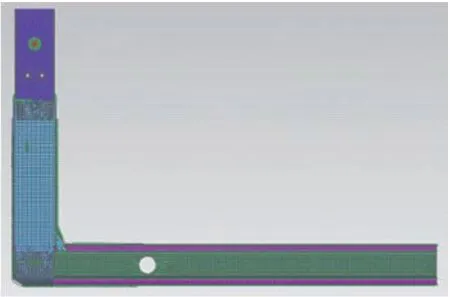
图2 钩臂网格划分
3.3 添加约束和载荷
模拟钩臂的运行工况,设置约束条件。在此文中主要分析钩臂运行状态的极限位置。对钩臂进行整体分析时,在钩臂下端部分选择固定约束命令对其自由度进行约束,如图3所示。根据钩臂的钩心高度,钩臂装置运行至极限状态时,此时受到最大的力与力矩,以及力的作用点,对其添加载荷。约束与载荷添加完成之后对其进行求解。

图3 钩臂固定约束
4 静力学求解结果分析
在有限元模型的前处理工作完成后,利用求解器中相应的结算类型,进行后处理工作。在U G N X中利用N X NASTRAN求解器进行相应的求解。在本文中,为了更好地了解钩臂装置的受力情况,对其进行十阶模态分析,可从各阶模态分析中清楚了解钩臂的应力、应变的趋势,可以更好地为后续钩臂装置的设计优化提供理论依据[5-6]。图4~7为某阶模态下的位移-节点、旋转-节点、应力-单元、应力-单元-节点的云图。通过各阶模态下的应力、应变情况分析,此工况下的应力、应变均在符合要求的范围之内。

图4 位移-节点云图
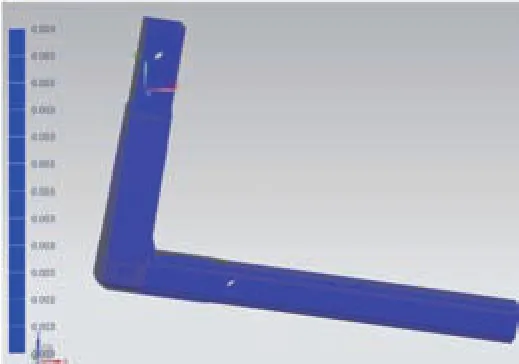
图5 旋转-节点云图
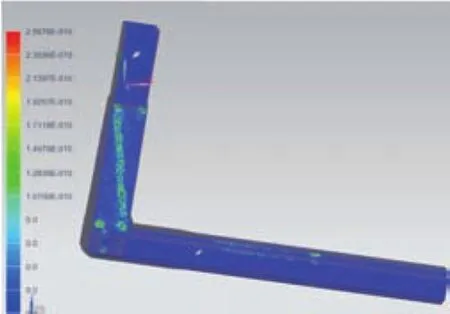
图6 应力-单元云图

图7 应力-单元-节点云图
求解结构完成之后,可利用UG NX自带的动画功能显示模型的变化情况,以便更好地可视化三维模型,并显示相应特定结算方案。图8为利用动画显示某阶模态下的应力变化状态,可以通过设置帧数调节播放的速度,观察应力的变化趋势。
5 结语
通过UG NX软件对钩臂装置进行分析,得出应力、应变云图。从而可知,钩臂装置在达到极限工况时的应力、应变均在允许的范围内。通过分析可以准确快速得出产品的应力、应变等情况,为产品的优化设计提供理论依据。
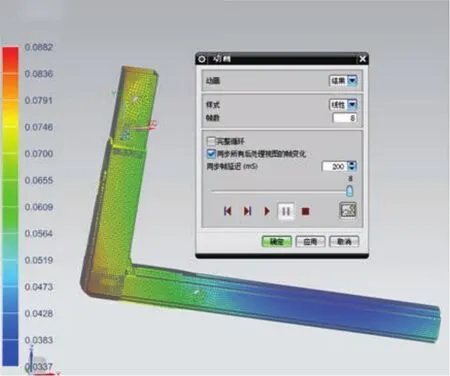
图8 动画状态下的应变云图
[1]石超,杨然兵,尚书旗.基于UG的花生收获机挖掘装置有限元静力学分析[J].农机化研究,2015(01):18-21.
[2]朱冰,李伟,任淑燕,王凯.基于Optistruct的拉臂稳定装置结构优化[J].专用汽车,2016(03):85-88.
[3]侯惠敏,蒋鹏,孙国强等. 250 mm伺服驱动辊锻机锻辊有限元静力学分析[J].锻压技术,2016(05):101-105.
[4]郑正,雷君相,罗宇舟.基于ANSYS对塑料齿轮的结构静力学分析[J].制造业自动化,2010(05):163-166.
[5]樊炳辉,焦浩,贾娜.基于Ansys WorkBench的排爆机器人机械手静力学分析[J].制造业自动化,2014(04):34-36.
[6]姜振廷,郑忠才,董旭.基于ANSYS WORKBENCH的六自由度机械臂有限元分析及结构优化[J].制造业自动化,2014(01):109-110+123.
Statics Analysis for Hook Arm Device Based on UG
In order to optimize the hook arm device performance and quality, a hook arm device was established by UG software, and also carried on the finite element statics analysis. By simplifying the working condition of hook arm device, having force analysis, and based on the material properties of the hook arm, finite element analysis model was established, and also having analysis of its deformation and stress distribution, which providing the theory support and security work for the structure optimization of hook arm.
hook arm device; UG; finite element; stress; deformation
U469.6+91.03
A
1004-0226(2017)08-0106-03
牟江涛,男,1979年生,工程师,主要从事专用车研发设计工作。
2017-05-30
