双馈风力发电系统最大风能追踪控制研究
2017-08-27彭志华尹进田岳雪卿
杨 勇,陈 静,彭志华,尹进田,岳雪卿
(1.苏州大学 城市轨道交通学院,江苏 苏州,215137;2.邵阳学院 多电源地区电网运行与控制湖南省重点实验室,湖南 邵阳,422000)
双馈风力发电系统最大风能追踪控制研究
杨 勇1,陈 静2,彭志华2,尹进田2,岳雪卿2
(1.苏州大学 城市轨道交通学院,江苏 苏州,215137;2.邵阳学院 多电源地区电网运行与控制湖南省重点实验室,湖南 邵阳,422000)
文章分析了国内外风力发电技术的发展现状,研究了双馈异步风力发电机组最大风能捕捉方案,研究了由风力机、传动系统、双馈异步发电机以及双PWM变换器等模块组成的风力发电最大风能追踪控制系统。风力机采用变桨距控制,双馈异步风力发电机采用变速恒频技术,发电机采用功率外环、电流内环的双闭环控制,利用定子磁链定向矢量控制实现有功功率和无功功率的解耦控制。并研究了双馈异步风力发电控制的硬件系统和软件系统,硬件系统由主电路、控制电路和驱动电路组成,软件系统研究了网侧和转子侧的控制流程图。基于Matlab/Simulink软件进行了建模仿真,仿真结果表明,系统具有较好的控制效果,可实现最大风能控制。
风力发电;双馈异步风力发电机;双PWM变换器;最大风能追踪
近年来,世界各国都鼓励发展可再生能源,以此应对能源危机和环境污染。在可再生能源中,水能已经得到了很好地利用,太阳能技术还不够成熟。风力发电技术不断的发展,使之在能源利用的比重中持续增长。风力发电不受燃料价格的限制,成本较低,对环境几乎没有污染,建设周期短,实际占地面积小,并且无处不在,取之不尽。风力发电的各种优势,得到了各国的青睐,给予了很多政策上的支持,发展前景可观[1]。
从能量转换来看,风力发电是通过风力机驱动发电机将自然界的风能转换成机械能,然后再通过风力发电机将风力机得到的机械能转变为电能。风力机的特性使得风力机运行在不同的风速下时,有且仅有一个能够达到最佳运行状态的转速,控制风力发电机组使它维持在最优的转速下,便可实现最大风能追踪控制,提高发电效率。
风力发电系统最大风能追踪控制系统由风力机和发电机系统两部分组成。风力机采用变桨距控制,发电机采用变速恒频风力发电技术是当今世界风力发电技术发展的主要趋势。
风力机的控制方案主要有定桨距控制和变桨距控制两种。定桨距控制中,风力机的叶片固定在轮廓上,在风速变化时,迎风角度不变,功率调节全部要靠叶片自身的气动特性。当风速低于额定风速时,风力机输出的功率随风速而变化;高于额定风速时,通过叶片的失速特性和偏航系统来限制风能捕获,使得输出功率恒定不变。变桨距控制中,叶片桨距角可调,可以使输出功率恒定不变。低于额定风速时,桨距角接近于零度,可以看作定桨距风力机工作;高于额定风速时,调节桨距角,保持输出功率恒定。采用变桨距控制,风力机受到的冲击较小,可以节省材料,降低风力机重量。所以,变桨距控制逐渐取代了定桨距控制。
根据双馈异步风力发电机的运行特性,风力发电技术主要分为恒速恒频发电和变速恒频发电两种方式。恒速恒频风力发电技术,只有在固定的某一转速上运行才能达到最优运行效率。变速恒频发电技术,可以根据风速的变化实时调节风力机转速,使风力机始终运行在最佳转速上,提高了机组发电效率。决定变速恒频发电技术的关键是系统控制装置的设计。
风力发电变速恒频的控制方法多种多样,主要分为两类:一类是,将风力机和发电机的运行特性结合起来,结合发电机的电磁关系,来设计相应的控制策略[1-5];另一类是,将风力发电系统的整体或一部分作为非线性的被控对象来控制,控制策略的重点在于各种智能控制算法,如模糊控制、神经网络等控制策略的综合运用[6-11]。
本文研究双馈异步风力发电系统的定子磁链定向矢量控制技术,分析双馈异步发电机系统的有功功率与无功功率控制机理,推算得到有功和无功解耦控制策略,建立起无功功率控制外环,电流控制内环的双闭环系统,通过控制双馈异步发电机,使其有功功率为最优值,从而实现最大风能追踪控制。
1 双馈风力发电最大风能追踪系统结构及工作原理
1.1 双馈风力发电最大风能追踪控制系统结构
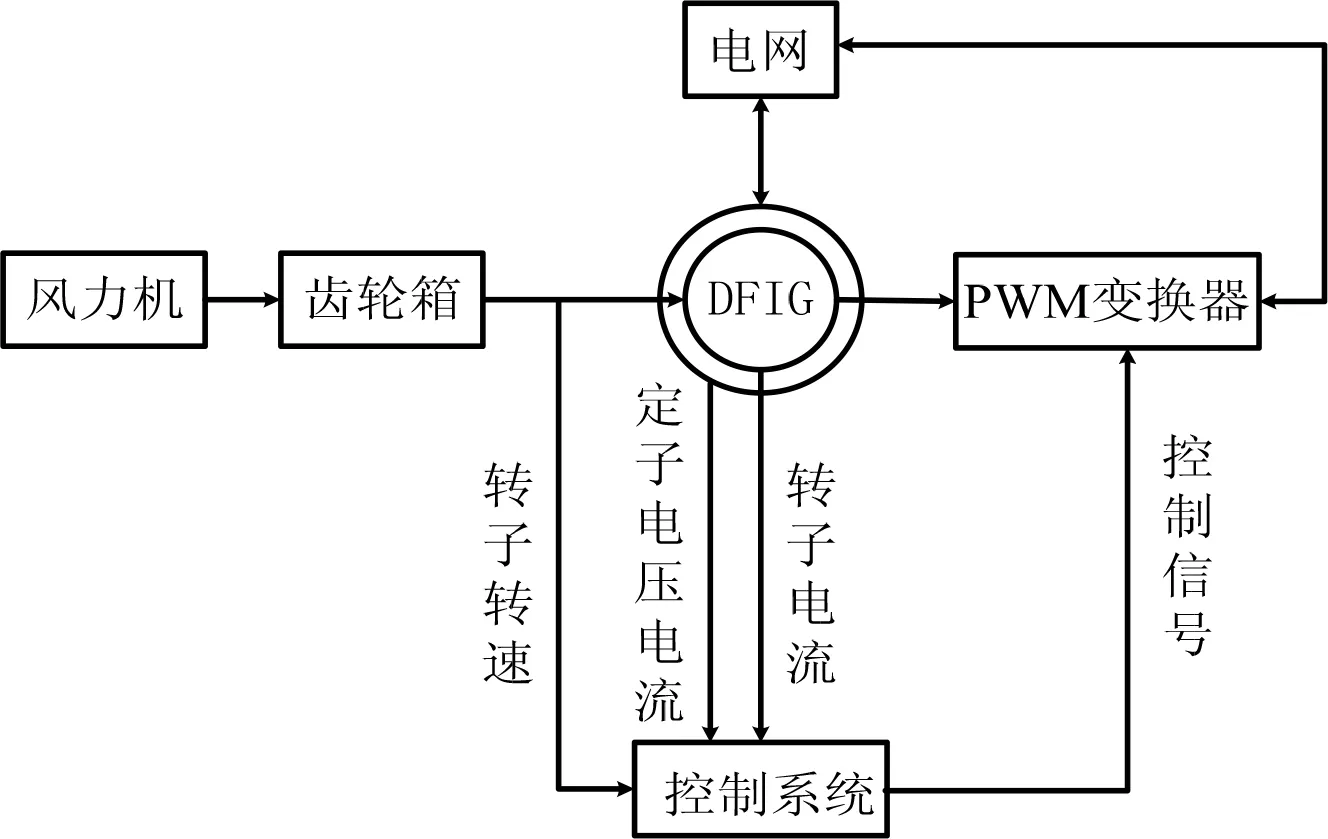
图1 系统整体控制框图Fig.1 Overall control block diagram of the system
双馈风力发电最大风能追踪控制系统如图1所示。系统主要由风力机、齿轮箱、发电机、PWM变换器和控制系统几个部分构成。风力机通过风能带动旋转叶片将风能转变为机械能,齿轮箱连接风力机和双馈异步电机,不仅可以吸收阻尼和振动,还能减小机械装置过载的影响,主要用来将风力机的转矩传递给双馈异步发电机,发电机将得到的机械能转变为电能输出到电网。为了实现最大风能追踪控制,双馈异步发电机定子侧直接与电网相连,转子侧通过PWM变换器与电网相连。控制系统通过控制PWM变换器来控制电机。通过调节双馈风力发电机励磁电流频率改变发电机的转速,调节励磁电流的幅值改变电机的无功功率,调节励磁电流的相位改变发电机的有功功率。
1.2 系统工作原理
双馈异步风力发电矢量控制系统原理如图2所示。风力机将风能转换为机械能,产生的机械功率与风能转换系数和风速有关,风速一定时,机械功率的大小只受风能转换系数的控制,风能转换系数又是叶尖速比和桨叶节距角的函数。根据风力机的特性曲线,桨叶节距角一定时,风能转换系数是叶尖速比的函数,风能转换系数的大小只由叶尖速比来决定,可以用一条曲线来表示,相当于定桨距风力机。每个桨叶节距角都会有且仅有一个最佳叶尖速比对应最大风能利用系数。
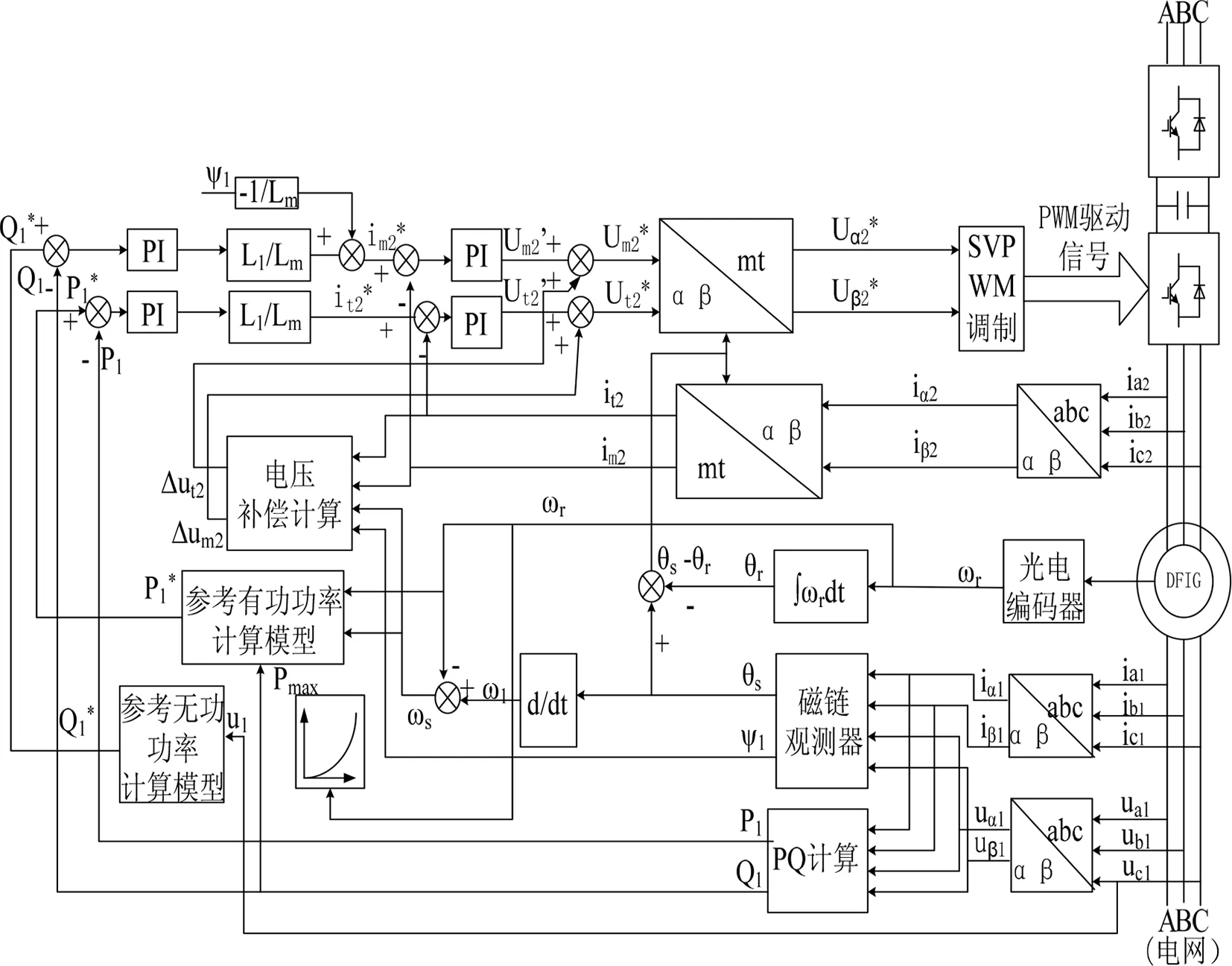
图2 系统矢量控制原理图Fig.2 System vector control schematic diagram
根据测量的风力机的转速,然后再由风力机的特性曲线,求出最佳叶尖速比时的最大输出功率,并作为风力机输出功率的给定值,通过双馈异步电机功率外环、电流内环双闭环控制来控制风力机的转速,来实现对最大功率点的捕获。
为了能够控制发电机的转速和输出的功率因数,本文使用定子磁链定向矢量控制技术对发电机的有功功率和无功功率进行解耦控制,通过控制PWM变换器来控制电机。使用电流互感器和电压互感器来测量电网的电压和电流,一方面将测量的结果进行坐标变换,根据有功功率和无功功率的计算公式,求出有功功率和无功功率的反馈值。另一方面,将测量的结果经过磁链观测器,求出定子磁链矢量和定子磁链的相角。
使用光电编码器测量双馈异步电机的转速信号,根据风力机最佳叶尖速比和最大输出功率,利用参考有功功率计算模型,得出有功功率的参考值。无功功率的参考值直接根据电网电压来设定。然后将有功功率与无功功率的反馈值和参考值进行比较,通过PI调节器得出定子励磁电流分量参考值和转矩电流分量参考值。再根据定子和转子电流的关系,求出转子励磁电流分量参考值和转矩电流分量参考值。
测出转子侧电流值,经过坐标变换,求出转子侧励磁电流分量和转矩电流分量的反馈值,一方面将转子电流的参考值和反馈值进行比较,差值经过PI调节器求出矢量控制系统的解耦项。另一方面将转子电流反馈值通过电压补偿计算,得出控制系统的转子补偿电压,来消除转子电压电流交叉耦合。将矢量控制系统的解耦项和转子补偿电压相加,得出转子参考电压的有功和无功分量,通过坐标变换后,通过空间电压矢量PWM调制,输出PWM驱动信号,来调节PWM变换器,来控制双馈异步发电机的转速。
双馈异步发电机将双PWM变换器作为转子的励磁电源,通过控制转子侧变换器来实现电机的控制。由风力机的转速来调节转子电流频率,使系统能够做到变速恒频输出。通过对转子电流转矩分量和励磁分量的控制,达到电机的有功功率和无功功率的解耦控制,实现最大风能追踪控制。
2 双馈异步风力发电控制系统设计
2.1 控制系统硬件设计
双馈异步风力发电控制系统硬件结构图如图3所示。整个系统由主电路、控制电路、IPM驱动电路、保护电路、检测电路、通讯电路和电源电路等部分组成。主电路包括双馈异步发电机、滤波电感、双PWM变换器等。双PWM变换器采用交直交型拓扑结构,用集成度高、性能稳定的I智能功率模块。双馈异步发电机定子侧直接与电网相连,转子侧经双PWM整流、滤波和逆变后接入电网;控制电路是以DSP28335为核心的控制系统和上位机,DSP28335控制系统将检测到的电压、电流信号进行调理计算后,输出控制信号,一方面控制双PWM变换器,另一方面通过串行通讯接口实现和上位机的数据交换,达到实际监控的目的;用超高速光耦来驱动IPM。
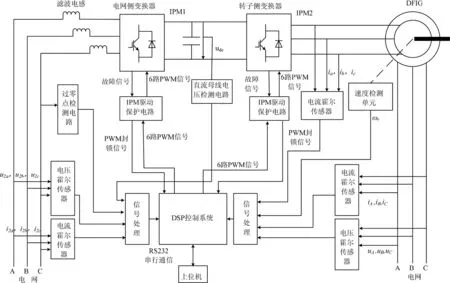
图3 控制系统硬件结构图Fig.3 Hardware design block diagram of control system
2.2 控制系统软件设计
控制系统的软件设计,依据最大风能扑捉及矢量解耦控制策略和运行特性,在DSP28335的集成开发环境CCS下进行程序设计。软件系统主要由两部分组成:网侧变换器的控制程序和转子侧变换器的控制程序。转子侧变换器的控制流程图如图4所示。
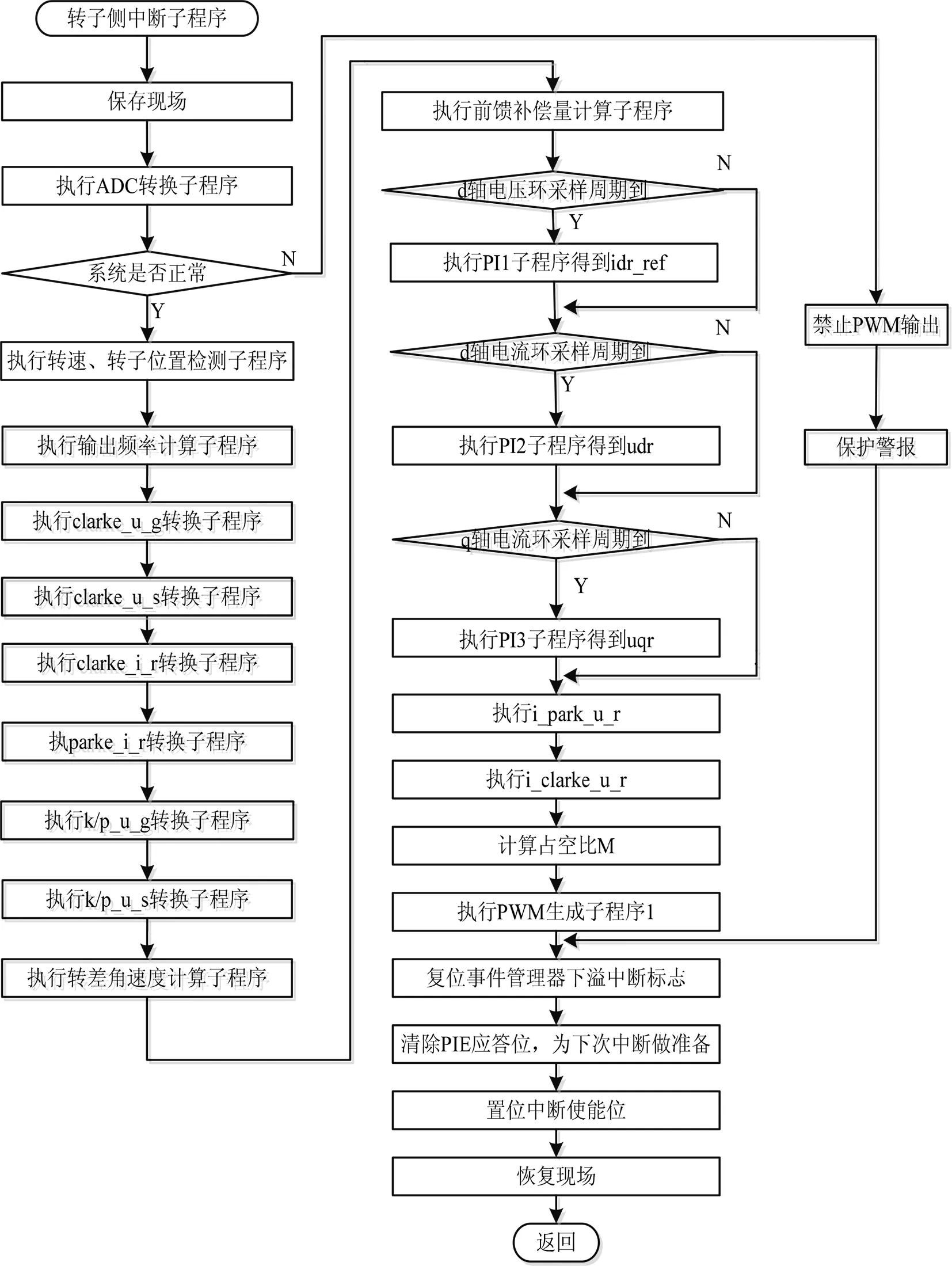
图4 转子侧变换器控制流程图Fig.4 Control flow chart of rotor side converter
3 双馈风力发电最大风能追踪控制系统建模及仿真
双馈风力发电最大风能追踪控制系统的仿真模型主要分为风力机、传动系统、双馈异步发电机、PWM变换器和控制系统几个基本模块。根据各个基本模块的数学模型,建立各模块的仿真图,然后再根据模块间的相互关系,将各模块联系起来,获得系统的仿真模型,如图5所示。
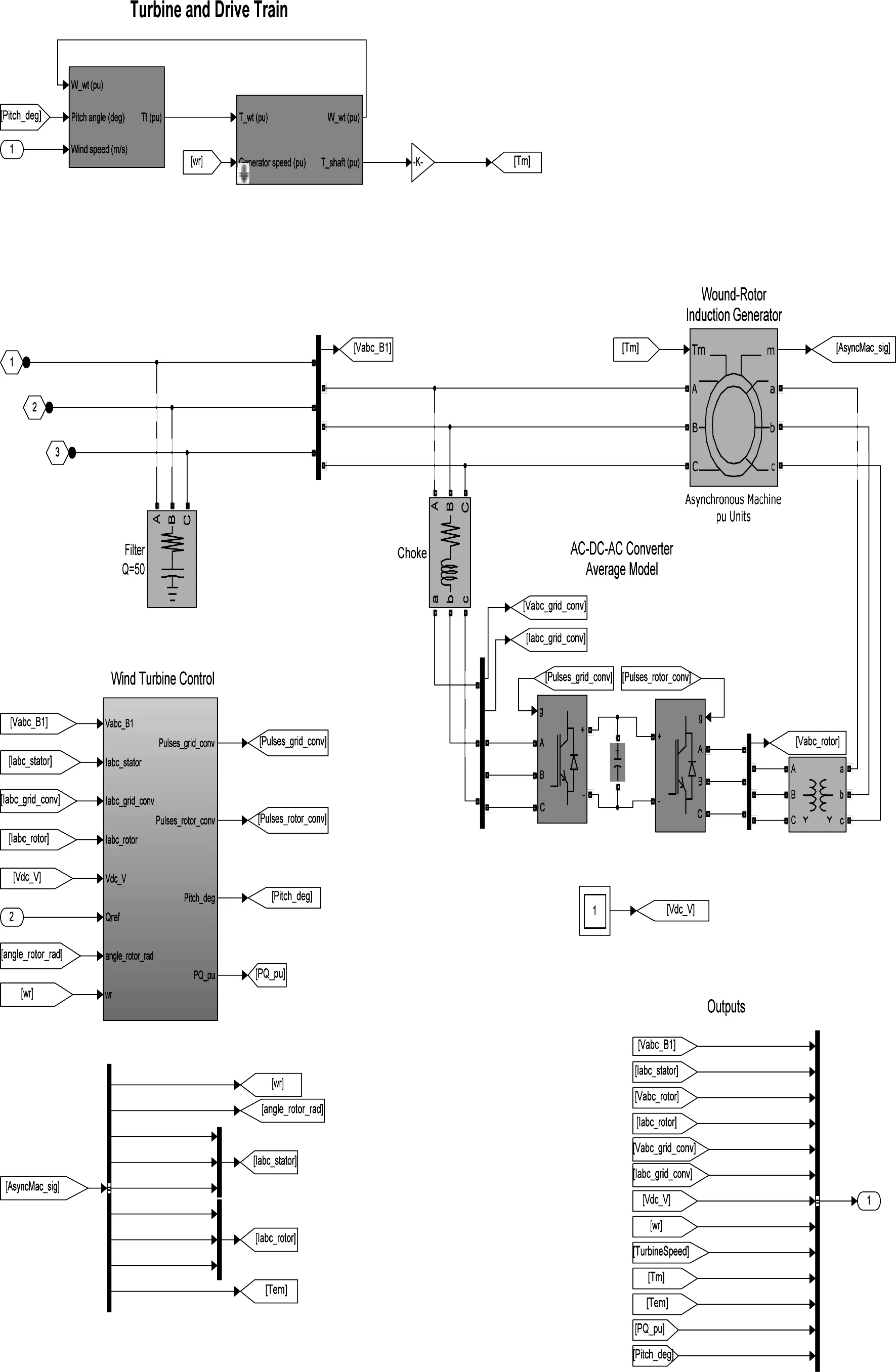
图5 风力发电控制系统仿真模型Fig.5 Whole simulation model of wind power generation control system
双馈异步风力发电系统的仿真模型主要分为三大模块。一是风力机和传动系统的模块,此模块中的风力机模块的输入为风速、风力机叶轮角速度、桨叶节距角,根据风力机的数学模型,输出机械转矩。模块中的传动系统模块的输入为风力输出机械转矩和发电机的角速度,然后根据传动系统的数学模型,输出风力机的叶轮角速度和接入发电机的机械转矩,风力机和传动系统为单闭环控制,通过控制风力机叶轮角速度实现最大风能的追踪控制;二是发电机和双PWM控制模块,此模块中双馈异步风力发电机的输入为传动系统输出的机械转矩,电机的定子侧直接经过滤波器接入电网,滤波器的Q值为50。转子侧通过三相变压器与双PWM相连,双PWM再和电网相连,通过控制PWM,达到控制电机有功无功和转速;三是控制模块,此模块的输入为定子电压和电流、双PWM变换器网侧电流、转子电流、直流电压、参考无功功率和发电机角速度。输出为双PWM的网侧驱动脉冲和转子侧驱动脉冲、桨叶节距角和有功无功功率。
4 系统仿真及结果分析
依据图5风力发电控制系统仿真模型,进行系统仿真,对于 15 米/秒的风速,根据风力机的特性曲线,计算得到风力机最大输出功率标幺值为1,发电机转速的标幺值为1.2(如图6)。无功功率保持在 0Mvar,仿真结果证明理论分析正确。
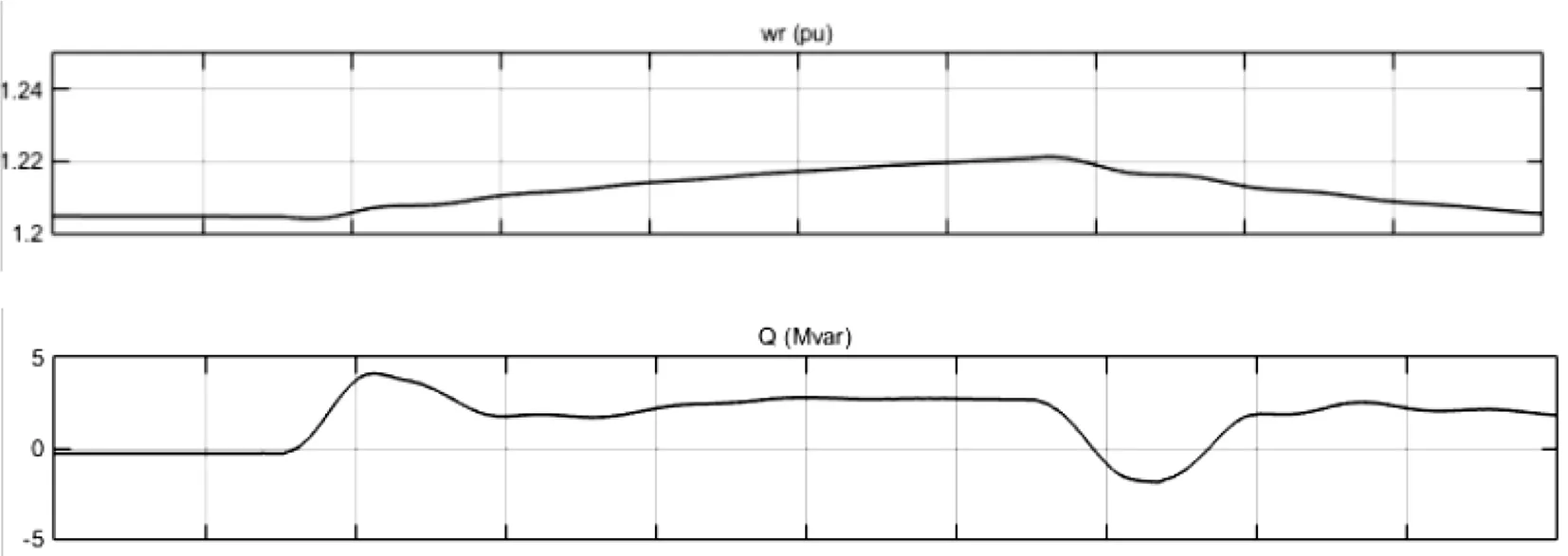
图6 风速及功率仿真波形Fig.6 Simulation waveforms of wind speed and power
[1]HOU G L,WANG Z T,JIANG P,et al.Multivariable predictive functional control applied to doubly-fedinduction generator under unbalanced grid voltage conditions[C]∥The 4th IEEE Industrial Electronicsand Applications Conference.Xi’an:2009.
[2]付晓明,李守智.变速恒频风力发电系统最大风能追踪的控制[J].电力系统及其自动化学,2013,25(1):74-78.
[3]钟沁宏,阮毅,赵梅花,等.双馈风力发电控制系统基础平台的构建和研究[J].可再生能源,2013,31(4):45-49.
[4]郑湘渝,曹海泉,湛涛,等.双馈风力发电系统最大风能追踪控制的研究[J].电网与清洁能源,2010,26(6):75-79.
[5]肖运启,徐大平,吕跃刚.基于模糊逻辑的变速恒频风电系统最大风能追踪控制[C]∥Proceedingsof the 26th Chinese Control Conference,2007:294-298.
[6]姚兴佳,韩嵩崟,赵希梅.变速恒频双馈风力发电机的最大风能追踪控制[J].电气传动,2012,42(7):57-60.
[7]田友飞,李啸骢,徐俊华.变速恒频双馈风电机组最大风能捕获非线性控制策略[J].电力系统自动化,2011,35(11):27-31.
[8]MESEMANOLIS A,MADEMLIS C.Self-tuning maximum power point tracking control for windgeneration systems[J].IEEE Transactions on Industrial Electronic,2008,11(2):407- 413.
[9]高勇,张文娟,杨媛.基于无源性的变速恒频双馈风力发电机控制系统[J].电工技术学报,2010,25(7):130-136.
[10]肖运启,徐大平,吕跃刚.双馈风电机组一种新型模糊最大风能追踪控制[J].华北电力大学学报,2009,36(6):1-7.
[11]曹淑军.变速恒频风力发电系统最大风能追踪控制的研究[D].河北:河北工业大学,2010.
Control system research of maximum wind energy tracking in doubly-fed induction generator wind generation system
YANG Yong,CHEN Jing,PENG Zhihua,YING Jintian,Yue Xueqing
(1.School of Urban Rail Transportation,Soochow University,Suzhou 215137 ,China; 2.Shaoyang University,Hunan Provincial Key Laboratory of Grids Operation and Control on Multi-Power Sources Area,Shaoyang 422000,China)
This paper analyzes the present situation of wind power at home and abroad,and study the realization scheme of the largest wind power generation.The wind power optimal wind energy tracking control system composed of wind turbine,transmission system,doubly-fed asynchronous generator and dual PWM converter.The wind turbine uses pitch control,the generator adopts the variable speed constant frequency technology,the generator control adopts the double closed-loop control of the power loop current loop,using stator flux orientation vector control to decouple control.This paper analyzes the hardware and software design of the wind power generation control system,the hardware includes the design of the main circuit,control circuit and drive circuit,and the software introduces the control flow chart of the network line and rotor side.The simulation modeling was carried out in MATLAB / Simulink.The simulation results show that the system has good control effect,Maximum wind energy control can be realized.
wind power generation;DFIG;dual PWM converter;maximum wind energy tracking
1672-7010(2017)04-0050-06
2017-06-12
国家自然科学青年基金资助项目(51407124);中国博士后科学基金资助项目(2015M581857);湖南省科技计划重点项目(2016TP1023);湖南省教育厅重点项目(16A191);湖南省2015年普通高等学校教学改革研究项目(湘教通【2015】118号);2016湖南省教育信息化创新教学应用项目(湘教科研通【2016】28号)
杨勇(1981-),男,湖南娄底人,博士,博士后,从事光伏发电、风力发电及微电网控制研究;E-mail:yangy1981@suda.edu.cn
TM315
A
