基于坡道识别技术的电动汽车换挡控制策略
2017-08-22王晓兵张军郝冬王仁广王朝
王晓兵 张军 郝冬 王仁广 王朝
(1.中国汽车技术研究中心;2.北京理工大学)

装配自动挡的汽车在行驶过程中,如果换挡控制策略只考虑在平路上行驶的情况,那么会出现在坡道上挡位选择不合适,很有可能发生循环换挡的情况。自动变速器的循环换挡会严重影响驾驶员的驾驶感受,并对汽车的动力性、驾驶平顺性及机械系统的寿命甚至安全方面造成不良的影响。所以坡道识别对自动变速器的换挡控制策略的制定有着重要的影响,是必须考虑的实际因素之一。在充分考虑这种实际工况的基础上,文章针对电动汽车在制定两挡微型电动乘用车的自动变速器换挡控制策略时,采取路面识别的算法,并通过具体研究发现渐消记忆最小二乘算法对坡道的识别效果最好。为此在制定自动变速器的换挡策略时,根据采用的坡道识别结果对原有的基本换挡控制策略进行修正,最后得到了具有坡道适应性的综合换挡控制策略,并进行了具体的仿真分析。
1 自动变速器的循环换挡现象分析
当汽车行驶在平路或者坡度很小的道路上时,自动变速器的基本换挡规律基本可以满足汽车的换挡需求。但当汽车在坡道上行驶时,如果仍然按照在平路上行驶的换挡规律,就有可能造成汽车频繁换挡。通过仿真分析具体行驶过程发现,当汽车在坡度为25%的坡道上行驶时(油门全开),按照基本换挡规律换挡时会发生频繁换挡现象,如图1所示。图2示出仿真结果表现出的对应的车速变化情况。

图1 无坡道识别的挡位位置变化情况(坡度为25%)

图2 无坡道识别的车速变化情况(坡度为25%)
分析发现,出现上述情况是因为在1挡换入2挡后,2挡下的驱动力不足以克服坡道阻力,结果造成车速下降,当降到2挡回1挡的换挡点后,汽车又换回1挡;但随后车速上升,升到升挡点后又换为2挡,如此循环往复,就造成了典型的循环换挡的现象。由图1和图2可以看出,在换挡过程中,由于存在空挡状态,虽然时间很短,但因为坡度较大,换挡过程中会出现很明显的车速下降情况,并导致自动变速器出现循环换挡现象[1]。为此采用自动变速器的汽车控制策略需要进行坡道识别研究,通过具体的坡道识别算法,来解决汽车在坡道上的循环换挡问题。
2 坡道识别算法分析
2.1 渐消记忆最小二乘法
极大似然估计法和最小二乘法作为经典的算法被广泛应用于参数估计的领域中。最小二乘法的优点是对静态系统和动态系统同样有效,线性系统和非线性系统、离线估计和在线估计都可以使用[2]。因此文章采用基于最小二乘法的改进算法进行具体研究,这种算法的矩阵形式,如式(1)所示。

式中:Zm——系统第m次监测值;
Hm-1——第m-1次系统真值;
θ——待估计参数;
Vm——均值为0的随机噪声。
根据极值原理,求得的估计值表达式,如式(2)所示。

式(1)为一般形式的最小二乘估计,由于汽车在实际行驶过程中参数的计算识别必须是实时和动态的,因此一般形式的最小二乘法不适用于实际工况,需要对它进行转化。转化中把新测得的数据不断地加入进来,通过递推计算,使估计值的精度达到要求,这就是最小二乘递推算法。基本依据就是现在的估计值(等于上一次的估计值(赞m)加上修正值,即是以为参考,然后引入新的数据后对其修正从而得到的。根据该思路得到更新算法,如式(3)所示。
式中:K——增益矩阵;
P——信息逆矩阵;
zm+1——系统第m+1次监测值;
hm+1——系统第m+1次真值。
在θ不变的情况下,式(3)能够取得较好的估计效果,当θ处于不断变化的状态时,这种常规的最小二乘递推算法就会丧失对参数的估计能力。对于汽车坡道识别来说,道路的坡度可能是实时变化的,这时此方法是不适用的。为此引入权函数ω(k)=λm-k(0<λ<1),相当于应用带指数权的误差函数(如图3所示),即得到误差目标函数,如式(4)所示。

式中:λ——遗忘因子。
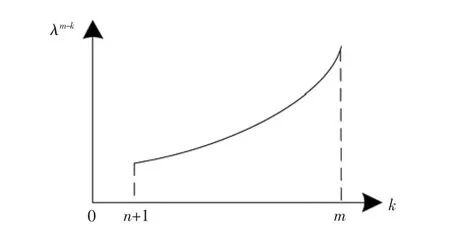
图3 带指数权的误差函数
这种误差目标函数是利用对过去数据的加指数权来人为地强调当前数据的作用,这种权函数的作用相当于给平方方程误差加一个1阶的滤波器,或者说对以前的测量数据加上一个遗忘因子,以逐渐降低旧数据提供的信息量,增大新数据提供的信息量,故这种方法又称为渐消记忆最小二乘法。这种渐消记忆最小二乘参数估计实时算法的递推形式,如式(5)所示。
式中:I——单位向量。
一般来说,λ的范围为0<λ<1。λ的大小与旧数据对算法影响的大小成正比,故λ的取值需要结合具体情况进行选择。
2.2 坡道识别模型的建立
汽车行驶的动力学方程,如式(6)所示[3]。

式中:Ttq——驱动力矩,N·m;
ig,io——变速器、主减速器速比;
ηT——传动系效率;
r——车轮滚动半径,m;
g——重力加速度,取9.8 m/s2;
α——坡度角,(°);
f——滚动阻力系数;
u——汽车速度,km/h;
CD——空气阻力系数,kg/m3;
A——迎风面积,m2;
δ——汽车旋转质量换算系数;
m——整车质量,kg。
由式(6)得到式(7)。

令 f=tan αf,则整理得式(8)。

将式(8)写成参数辨识的矩阵形式,如式(9)所示。


式(10)中 z,h1,h2均为已知量,Ttq可由油门踏板开度和电动机转速结合其外特性曲线查表得出,车身加速度可由u微分得到。
采用渐消记忆最小二乘法进行m以及行驶道路坡度[sin(α+αf)]的实时识别。为此,引入λ1和λ22个遗忘因子,λ1和λ2分别对应于m和sin(α+αf)。由于对于乘用车而言,行驶中m基本不会发生变化,故λ1的取值较大,文章取λ1=0.99;而道路坡度往往是变化的,所以需要保持良好的跟踪特性,取λ2=0.4。识别参数的初始值设定如下:
2.3 坡道识别仿真分析
在整车仿真模型的基础上,运用MATLAB中的S-function模块完成坡道识别模块程序的编写。以车身模块中输入的道路坡度为实际值,以参数辨识模块识别出的坡度值为估计值进行比较。为了更加真实地反映识别效果,仿真时在车身模型输出的加速度信号上叠加了方差为0.001的高斯白噪声。参数辨识仿真模型,如图4所示。利用建立的仿真模型计算得到的坡道具体辨识结果,如图5所示。从图5中可以看出,道路坡度估计值可以很好地跟踪实际道路坡度值的变化,且识别结果与实际值基本吻合,这说明利用渐消记忆最小二乘法进行道路坡度参数辨识的方法可以比较真实地反映现实情况,估计方法有效。

图4 整车质量和道路坡度参数辨识模型

图5 坡道识别仿真曲线对比
3 基于坡道识别的换挡控制策略制定
3.1 最大爬坡度的计算
为了保证汽车在换入2挡后仍然能保持足够的驱动力去克服坡道阻力,需要对汽车在2挡状态不同油门开度下的最大爬坡度进行计算。
汽车的最大爬坡度,就是指汽车在良好路面上等速行驶,平衡风阻和滚动阻力后的余力全部用来克服坡道阻力时能爬上的坡度[4],所以有:
式中:Fi——汽车用于克服坡道阻力的力,N;
Ft——汽车总驱动力,N;
Ff——汽车滚动阻力,N;
Fw——风阻,N。

变换式(13)可以得到式(14)。

再由imax=tan αmax,可以计算出汽车的最大爬坡度(imax)。将不同车速和不同加速踏板开度下的1挡和2挡的爬坡度图视化,如图6所示。从图6可以看出,2挡最大爬坡度在0.2附近,这就不难解释上述输入坡度值为0.25时循环换挡情况的发生原因。

图6 1挡和2挡不同油门开度下的最大爬坡度
综上,基于坡道识别的换挡策略需要修正的内容如下:
1)如果在当前加速踏板开度下,换入2挡后的最大爬坡度(i2,max)小于当前道路坡度(i),则不允许进行换挡操作,即在换挡策略中加入判断条件:i<i2,max;
2)由于换挡过程中会出现动力中断的情况,这样在坡道会造成车速下降得更多,为了防止换挡过程中车速下降到降挡点以下造成频繁换挡,应该加大爬坡工况下的降挡速差。
3.2 带坡道修正的换挡控制策略仿真分析
根据提出的坡度值修正方法对原来的换挡策略进行修改,并通过具体仿真分析来验证其有效性。图7示出任意给定的道路坡度输入值,图8示出识别的道路坡度值。

图7 仿真输入的坡度值
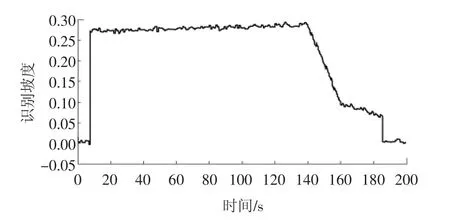
图8 通过识别得到的坡度值
在图7所示的坡度下,未对换挡策略进行修正时的换挡过程,如图9和图10所示。由图9和图10可见,在未进行策略修正时,汽车在坡道较大路段由于2挡下汽车的动力性不足产生了循环换挡的现象,严重影响了汽车的正常驾驶。

图9 无坡道识别的挡位位置变化情况(变化坡度)
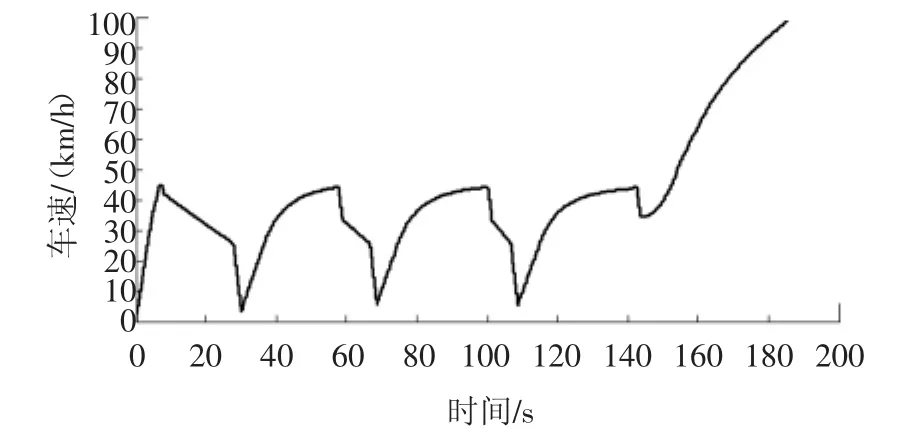
图10 无坡道识别的车速变化情况(变化坡度)
加入坡道策略修正之后,换挡情况如图11和图12所示。
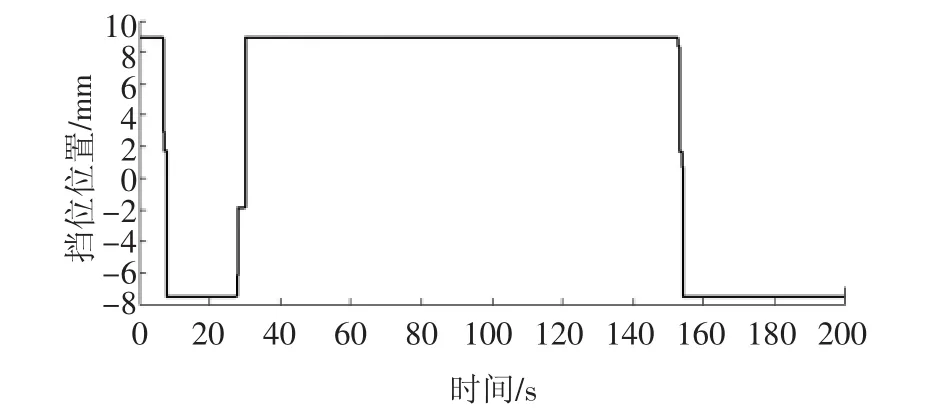
图11 加入坡道识别后的挡位位置变化(变化坡度)

图12 加入坡道识别后的车速情况(变化坡度)
可见最开始坡度为0时,汽车加速到换挡点后换入2挡;随后开始爬坡,由于2挡动力性不足,车速会逐渐下降,降到降挡点后汽车换回1挡;随后由于当前坡度大于2挡最大爬坡度,所以不再进行升挡操作,汽车保持1挡前行;当坡度逐渐下降,降到低于2挡最大爬坡度的较小坡度后,汽车正常升挡,随后车速逐渐上升,汽车保持2挡行驶。
综上可以看出,基于坡道识别算法进行换挡策略修正后,汽车爬坡时能够很好地进行挡位的选择和控制,从而有效地避免循环换挡现象的产生,提升了换挡策略对实际道路行驶工况的适应性。
4 结论
通过分析研究可知,自动变速器的换挡控制策略如果不考虑坡道情况,虽然能满足平路上的行驶换挡操作需求,但会造成在坡道上循环换挡频发。通过采用渐消记忆最小二乘法制定道路算法,能够成功进行坡道识别,基于此提出了适应坡道情况的两挡自动变速器换挡控制策略。通过仿真分析得出,文章提出的具体方法能够很好地解决坡道换挡循环问题,策略适应性大大增强,满足了具体使用需要,后续在实际汽车上使用时可以进一步验证概算的实时性和有效性。
