水面舰船可调型球艏设计与分析
2017-08-09张文山卢晓平
张文山,卢晓平
(海军工程大学 舰船工程系,武汉 430033)
水面舰船可调型球艏设计与分析
张文山,卢晓平
(海军工程大学 舰船工程系,武汉 430033)
考虑到固定式球艏对船舶减阻能力随航速变化敏感,为了避免固定式球艏在兼顾多个航速下减阻的局限性,提出可调型球艏设计思路,依托CFD软件STAR-CCM数值模拟对可调型球艏设计方案构想进行理论验证,根据阻力对比和优化确定球艏静态参数,根据波形计算和比较确定球艏动态参数。通过静态参数的建立和动态参数的预报,将可调型设计方案具体化。计算结果显示,可调型球艏能够实现低速阶段不增速,中高速阶段减阻显著的目标。
可调型球艏;DTMB5415船型;球艏构型参数;兴波阻力;波形分析
球艏减阻研究一直是船舶水动力研究的热点,模型试验和数值计算均表明球艏对于减小船舶兴波阻力的潜力巨大,设计优良的球鼻艏具有较好的减阻效果,能够很好地改善船舶运营的经济性。球艏研究一般着眼于球艏构型的优化[1-2],基于数值计算的球艏阻力性能预报[3]和基于船型试验的波形测量分析等方面,目前多是针对固定式球艏。但传统固定式球艏在兼顾多个航速条件下减阻具有一定的局限性,低速条件下甚至会增大船舶阻力,由此引入可调型球艏的提法。可调型球艏设计旨在通过对球艏纵向位置进行调整,来实现多个航速下较好的减阻效果的目的,而克服固定式球艏减阻速度区间和减阻幅度受限的不足。本文即采用CFD数值模拟手段,以现有固定式球艏研究成果为基础,开展球艏构型参数对于水面舰船阻力性能影响和机理的分析,基于前伸型球艏的减阻优势,提出以建立合理静态参数为基础,调节动态参数为手段的可调型球艏设计方案。
1 可调型球艏设计方法
可调型球艏(见图1)的设计依据兴波阻力的产生和削减的特点,以球艏减小兴波阻力的机理为基础,即一定强度的球艏波与船体波因相位差异而相互消减。设计方案强调“低速阶段不增阻,中高速阶段减阻显著”的原则,通过球艏参数化建模的过程,将球艏构型参数划分为静态参数和静态参数。

图1 可调型球艏结构示意
球艏参数的设置与主船体构型密切相关,一般会明显影响球艏减阻性能的参数有球艏在船体坐标系中的空间位置、球艏的尺寸、形状和体积分布,球艏与船体的连接方式与参数间的合理配置也十分重要。考虑到可调型球艏具有大前伸的构型,需要通过球艏参数化建模统一球艏加装的标准。
可调型球艏的静态参数选取标准为应能够准确地描述球艏端部部分的几何尺寸、几何形状和横截面A的形状。球艏静态参数的选择是可调型减阻球艏设计的基础[4]。为简化流程,球艏选为圆球艏,球艏半径为球艏静态参数。通过阻力计算建立球艏静态参数。
在兼顾减阻效果的需要和球艏可调方案实施的可行性情况下,动态参数选为球艏前伸量(纵向位置)。球艏纵向位置范围的取为5%船长。
如图1所示,在球艏进行可调型变化过程中,静态参数不变。动态参数可根据实际需要进行实时变化,动态参数值需要在球艏设计时求得。动态参数预报的方法是在静态参数满足了必要的波幅强度以及不考虑球艏兴波和船体兴波相互干扰的条件下,调节球艏纵向位置使2组兴波的相位差能够尽量满足峰谷相遇的理想状态,由此实现球艏消波减阻功能。
2 参数化建模与阻力计算
2.1 球艏构型参数化设计
船体主尺度比和型线变化对船体所受的兴波阻力产生影响较为敏感,故而在衍生构建球艏构型时,应该有统一的几何尺度标准,安装位置规范统一,以保证模型规范且简便易行。
在进行球艏构型建模时,球艏对阻力特性影响较大的主要几何参数和要素概括如下。
1)球艏纵向位置。指球艏在船体坐标系中的具体位置,通过球艏前伸量控制。
2)垂向位置。指球艏中心轴线距水线面的垂向距离,本文选取原则为球艏下边缘与船体底部延长线相切[5]。
3)球艏半径或尺寸。球艏端部半径。
4)球艏与主船体连接方式。球艏与船体间有光顺圆柱贯穿式连接。
一般而言,横截面面积和球艏长度决定了球艏体积的相对大小[6],在长度一定的情况下,横截面面积能够影响球艏波的强度,而长度主要是影响球艏波的相位。故而在减阻球艏参数设置的研究方面,应当重点考虑影响球艏波强度的球艏半径和影响球艏波初相位的球艏纵向位置的减阻特征。
2.2 阻力计算
对计算船型按工程应用中处理高速水面舰船兴波阻力系数最常用的傅汝德方法,采用剩余阻力作为兴波阻力的表征,认为二者近似相等。
(1)
式中:Cw为兴波阻力系数;Cr为剩余阻力系数。
阻力系数采用工程中常用的定义,即
(2)
式中:Rw为兴波阻力;Rr为剩余阻力;ρ为水密度;υ为流体运动粘度;S为模型湿表面积。
3 可调型球艏参数确定
可调型球艏设计方案示例围绕标准船模DTMB5415展开,该船模长5.72 m、宽0.76 m,吃水0.248 m,其母型为美国现役阿里·伯克级驱逐舰,模型缩尺比24.825。在利用建模软件构建出DTMB5415原型之后,衍生和构建出一系列改型球艏模型,并利用建模软件生成相应的船型[7]。
3.1 模型建立
[4],通过Matlab编程最终得出理论最佳圆球艏半径,如图2所示。图2中最佳球艏半径系按巡航速度确定数值[8],球艏前伸量(纵向位置)结合以往研究结果、建造工艺和目标船型使用特性确定[9-10],为独立输入参数。

图2 DTMB5415最佳球艏半径
在进行球艏参数选型时,构建的几组改型球艏需在削去声呐导流罩的基础上加装,如图3所示,加装以后如图4所示。几组衍生的改型球艏半径见表1。
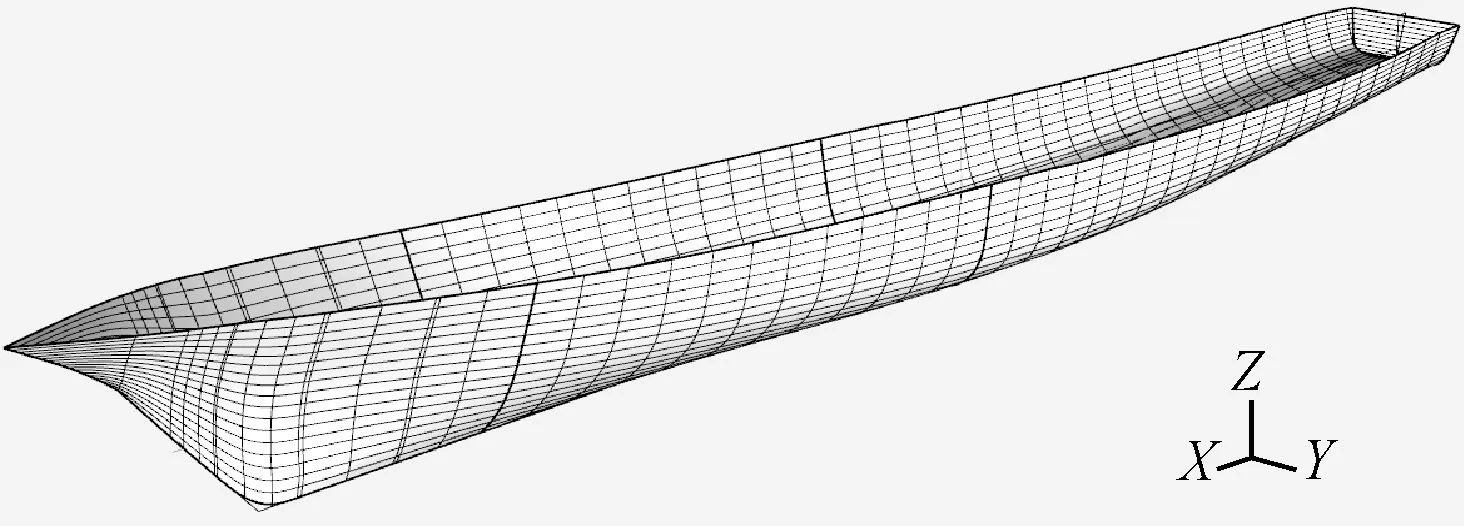
图3 计算模型DTMB5415G

图4 计算模型DTMB5415改型
3.2 静态参数建立
可调型球艏的可调机制基于球艏静态参数的合理设置。球艏静态参数影响球艏横截面面积及其在垂向和横向2个方向的面积分布。
对比不同半径圆球艏对阻力的影响见图5、图6,其中圆球艏的纵向伸长量相同[11]。

表1 改型球艏半径

DTMB5415 exp.为试验值,DTMB5415 cal.为数值计算值图5 改型和母型总阻力系数对比

图6 改型和母型剩余阻力系数对比
对比原型和改型的阻力曲线,显然,随着球艏半径变小而引起的减阻效果变化明显。综合分析低速和中高速阶段的减阻效果,得出改型DTMB5415 13船型得减阻效果最好。同时满足多个航速条件的最佳球艏半径取值范围为r=0.075~0.095 m。
在给定航速条件下,不同球艏静态参数会引起球艏兴波波幅的差异。其中球艏兴波的波长与航速有关,球艏波形相位的不同是由于球艏纵向位置有关。在给定航速条件下,不同球艏静态参数会引起球艏兴波波幅的差异。对改型DTMB5415 13球艏的端部部分单独建模,对不同速度条件下的首部波形进行数值计算,见图6。选取速度分别为v1=2.079 m/s(对应母型船Fr=0.28),v2=2.395 m/s(对应母型船Fr=0.32)和v3=3.071 m/s(对应母型船Fr=0.41)。

图7 独立球艏14B在3个速度条件下的兴波比较
独立球艏14B在不同速度条件下的兴波比较见图7。图7表明,球艏形成的表面自由波中横波的波长与在水中的航速相关。在不排除数值计算存在坏点的情况下,对球艏兴波波长进行预估。v1=2.079 m/s时,球艏兴波的波长约为1.5 m;v2=2.395 m/s时,波长为2.0 m;v3=3.071 m/s时,波长为3.0 m。波长随着速度的增加呈增长趋势。
3.3 动态参数预报
选取前述减阻效果较好的球艏构型DTMB5415 13作为动态参数预报的基础。球艏纵向位置的调节范围取为船长的5%,故而球艏的纵向坐标取值范围为[2.860 m,3.146 m]。为便于观察和操作,波形对比选用的坐标系为球艏坐标系,球艏中心处的纵坐标值为0,该坐标系与船体坐标系横坐标轴重合,竖坐标坐标轴平行。球艏的垂向位置选取原则与前文一致,即位置靠下的球艏水平切面的与船底相切。
对球艏和船首的兴波应用小振幅波假设,通过余弦函数对船体兴波和球艏兴波进行表达,建立随船坐标系,将船体波面方程简化写作
(1)
式中:A为波幅;ε为相位角;k(k=U2/g,其中:U为波速)为波数。
球艏在船体之前,二者之间的纵向距离相隔l,理论上假设2个干扰源引起的表面自由波波幅强度近似一致,波长相等,但相位相差刚好整个半波长。球艏波的波面方程表达为
(2)
二者叠加后波面方程表达为

(3)
由和差化积公式可得
(4)
由此得到合成波系的最大波幅为
(5)
其中,波数k跟船舶在水中的航速有关,故合成波系只与球艏和船体纵向距离l以及船舶航速有关。在航速一定时,球艏的纵向位置决定了合成波系的波幅。球艏初始距离,即初始伸长量为l0,可调范围为[0,Δlmax],在实际调节过程中的伸长量为Δl,则有
(6)
能够实现合成波系最佳消波的条件在理论上需要同时满足
(7)

计算得到速度v1条件下的最佳Δl1=0 m,速度v2条件的最佳Δl2=0.10 m,速度v3条件的最佳Δl3=0.06 m,据此对主船体位置进行平移,由于13B球艏的波幅较小,引入等波长的球艏11B,对比见图8。

图8 球艏波形与船体波形对比
由图8和以上分析可见,在实际设计过程中,因为有可调范围的限制,并不能完全实现满足船首波与球艏波的恰好相消。产生这种问题的主要原因如下。
1)受限于球艏的结构特征,动态参数的调节很难实现球艏波形与主船体波形充分相消。同时,据各类优化方法和手段对静态参数的优化,很难实现静态参数最优。
2)随船舶航速发生变化,球艏兴波波长相应改变,但波长和波长变化的量级尺度较大,相对而言尺度较小的动态参数(纵向位置)可调范围难以适应球艏与主船体波形相位差的变化,可调范围难以满足需要。
3)动态参数(纵向位置)变化的减阻效果的论证和预报较为复杂,难以获得精度很高的结果,模型试验条件,数值模拟计算和理论分析计算的精度都难以保证,减阻和消波效果难以精确评判。
4 结论
利用球艏与船体波形叠加相消的减阻原理,提出了纵向可调型球艏设计思路,以适用于大排水量球艏船型的减阻研究,具有一定的理论意义和应用前景。不同于以往的研究,可调型球艏方案不局限于固定式球艏的减阻构型优化,而从球艏减阻机理入手,灵活地改善球艏减阻特性。但由于波长随航速变化尺度大于可调球艏调节范围尺度,可调球艏船型方案具有一定的局限性。但这并不影响可调型球艏为改善固定式球艏减阻效果提供可行性方案。后续的研究中建议增加相应的模型试验,通过对比进行验证分析。
参考文献
[1] 李胜忠.基于SBD技术的船舶水动力构型优化设计研究[D].北京:中国船舶科学研究中心,2012.
[2] SHARMA R, SHA O P. Practical hydrodynamic design of bulbous bows for ships[J]. Naval engineers journal, 2005(Winter):57-75.
[3] 黄卫刚,姜治芳,邱辽原.撞角球鼻艏形式和参数变化对阻力影响的研究[J].中国舰船研究,2012,7(1):23-28.
[4] Ngo Van He, Yoshiho Ikeda. Optimization of bow shape for a non ballast water ship[J]. Journal of marine science and application,2013,12:254-260.
[5] 杨凤章.中高速舰船超大型球鼻艏设计[J].船舶,1994(1):22-35.
[6] 彭力.球艏参数化设计方法研究[D].武汉:武汉理工大学,2008.
[7] 张文山,卢晓平.基于圆球型球艏构型的兴波阻力减阻特性研究[J].中国舰船研究,2016,11(6):202-207.
[8] 刘应中.船舶兴波阻力理论[M].北京:国防工业出版社,2003.
[9] 林焰,纪卓尚,李铁骊,等.减阻球艏优化设计方法[J].大连理工大学学报,1999,39(6):785-79.
[10] 王中,卢晓平.水面舰船加装减阻节能球鼻艏研究[J].水动力学研究与进展(A辑),2006(6):789-795.
[11] OLIVIERI A, PISTANI F, AVANZINI A, et al. Towing tank experiments of resistance, sinkage and trim, boundary layer, wake, and free surface flow around a naval combatant INSEAN 2340 model[R]. Iowa, USA: University of Iowa,2001.
Investigation of Adjustable Bulbous Bow on Waving-making Resistance of Surface-ship
ZHANG Wen-shan, LU Xiao-ping
(Dept. of Naval Architecture Engineering, Naval University of Engineering, Wuhan 430033, China)
Because of the sensibility of stationary bow for resistance reducing with the speed change, a design scheme of adjustable bulbous bow was proposed to overcome the shortness of resistance reducing for different speeds. It was certified by numerical simulation utilizing CFD software STAR-CCM, and all of the parameters concerning to adjustable design were split up into static parameters and dynamic ones. Through setting the static parameters and predicting the dynamic parameters, the scheme of adjustable bulbous bow was materialized, and the design can achieve the preset goal with no adverse effect in low speed and remarkable effect of resistance reduction in medium and high speed.
adjustable bulbous bow; DTMB5415; configuration parameters; wave resistance; flow analysis
10.3963/j.issn.1671-7953.2017.04.004
2016-10-31
国家自然科学基金项目(51609253)
张文山(1991—),男,硕士生
研究方向:舰船流体动力性能
U662
A
1671-7953(2017)04-0015-05
修回日期:2016-11-25
