交流传动电力机车的调速控制方法研究
2017-08-08朱亚男
朱亚男
(西安铁路职业技术学院 牵引动力系,陕西 西安710014)
交流传动电力机车的调速控制方法研究
朱亚男
(西安铁路职业技术学院 牵引动力系,陕西 西安710014)
针对交流传动电力机车调速受多种耦合因素影响比较困难的问题,通过系统地分析和介绍目前实用的交流调速系统控制方法,包括:转差频率控制、矢量控制和直接转矩控制,结合交流电力机车调速的实际情况,得出矢量控制和直接转矩控制方法较转差频率控制方法更适用于交流电力机车调速,而矢量控制方法在低速高开关频率区的性能则比直接转矩控制方法更加优越。以上结论对于进一步理解交流电力机车调速控制方法有着重要作用。
交流调速;转差频率控制;矢量控制;直接转矩控制
交流传动电力机车调速的实质是对三相异步电动机调速,而异步电动机和直流电动机不同,它只有一个供电回路——定子绕组,致使其速度控制比较困难,不能像直流电动机那样通过控制电枢电压或控制励磁电流均可方便地控制电动机的转速,交流异步电动机的控制量只有定子电流,而定子电流的变化,不仅影响输出转矩,而且也会使气隙磁链发生变化[1-2]。
目前,变频调速是交流异步电动机最主要的调速控制方式。早期变频系统都是采用开环恒压比(V/F=常数)的控制方式,即通过在控制过程中始终保持V/F=常数,来保证定子磁链的恒定。这种控制策略是以电机本身稳态运行为立足点,即从电机机械特性出发分析研究电机的运行状态和特性,它的控制结构简单、价格便宜。然而这种控制方式是一种开环控制,其速度动态特性很差,电机转矩利用率低,控制参数(加、减速度等)还需要根据负载的变化做出相应的调整,特别是低速时由于定子电阻和逆变器电力电子器件开关延时的存在,系统可能会发生不稳定现象[3-4]。
随着交流电机调速控制理论及技术的发展,目前实用的交流调速系统控制方法主要有:转差频率控制、矢量控制和直接转矩控制等[5-7]。
文中对以上几种交流电力机车的调速控制方法做出系统性地分析介绍,对于进一步理解交流电力机车调速控制方法有着重要作用。
1 转差频率控制
转差频率控制实际上是在V/F控制的模式上引入了速度闭环,以避免V/F控制的缺点,是V/F控制的改进版。
交流传动电力机车的电机牵引传动系统属于典型的电力拖动控制系统,应服从电力拖动系统的基本运动方程式,如式(1)所示。

式中:
Te——异步电动机输出转矩(N·m);
TL——负载静阻转矩(N·m);
J——单轴旋转系统的转动惯量(N·m·s2)


由电动机近似等值电路化简,交流异步电动机的转矩可近似表达为式(2)的形示:

其中:Km——转矩系数;
Φm——气隙磁通(Wb);
ωs=sω1——转差频率(Hz),即转差率与定子频率的乘积;
r2——转子绕组的直流电阻(Ω)。
式(2)表明,在基频(50 Hz)以下,如果能够维持气隙磁通Φm恒定,则有Te∈ωs,就和直流电机中控制电流能够达到间接控制转矩的目的一样。控制转差频率就相当于控制了转矩,这就是转差频率控制的基本概念。
上面分析所得的转差频率控制概念是在转矩近似公式上得到的,当ωs较大时,就能得到精确的转矩公式,其转矩特性如图1所示,当ωs较小时且处于稳定运行段,转矩与转差频率ωs基本上成正比,当 Te达到最大值 Temax时,ωs达到 ωsmax。
从图1可知,在转差频率控制系统中,只要保证ωs<ωsmax,就可保证 Te与 ωs的正比关系,从而可以用转差频率控制来代替转矩控制。

图1 按恒Φm值控制的转矩特性
目前,在电力牵引交流传动系统中,大多采用脉宽调制PWM逆变器。这种逆变器最大的特点在于:当控制系统给定电压U1和频率时,PWM信号生成单元控制逆变器的输出总能保证电动机气隙接近于恒定值,以满足恒磁通控制的要求。转差频率控制的转速闭环变压变频调速系统结构原理如图2所示。
然而,上述转差频率控制规律均是在电机稳态条件下分析的,在动态特性下该规律不一定适用。同时,由于转差频率控制环节取,使频率得以与转速同步升降,这本是转差频率控制的优点,但是如果转速检测信号不准确或存在干扰,也就会直接给频率造成误差,因为所有这些偏差和干扰都以正反馈的形式毫无衰减地传递到频率控制信号上。
2 矢量控制
随着现代控制理论和控制技术的发展,一种模仿直流电动机控制的矢量控制系统取得了重大进展,其控制效果可以媲美直流电机速度控制。矢量控制已在许多变频调速系统、铁路干线机车(如西班牙的S252机车)和高速动车(如德国的ICE动车)上得到应用,HXD3型电力机车调速控制也采用矢量控制方法。

图2 转差频率控制的转速闭环变压变频调速系统结构原理图
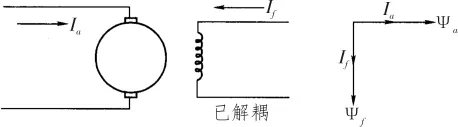
图3 他励直流电动机
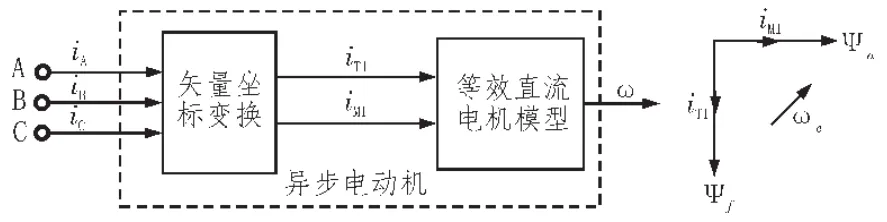
图4 异步电动机的坐标变换结构图
矢量控制是一种高性能异步电动机控制方式,它基于电动机的动态数学模型,通过坐标变换,将交流电机模型转换成直流电机模型。根据异步电动机的动态数学方程式,它具有和直流电动机的动态方程式相同的形式,因而如果选择合适的控制策略,异步电动机应有和直流电动机相类似的控制性能,这就是矢量控制的思想。因为进行变换的是电流的空间矢量,所以这样通过坐标变换实现的控制系统就叫做矢量变换控制系统,或称矢量控制系统。
矢量变换控制又称磁场定向控制 (或解耦控制),其基本思想是把异步电动机经坐标变换等效成他励直流电动机。然后仿照直流电机的控制方法,求得直流电机的控制,再经过相应的反变换来控制交流电机。
他励直流电动机控制如图3所示,在理想情况下,忽略电枢反压和磁路饱和的影响,直流电机的输出转矩表示为式(3):

其中:Ia——他励电机的电枢电流(A);
If——他励电机的励磁电流(A)。
直流电机结构决定了由励磁电流产生的励磁磁通与电枢电流产生的电枢磁通相互垂直。这些在空间上静止的矢量彼此之间自然垂直或是解耦的。这就意味着当通过控制电枢电流以控制转矩时,励磁磁通不受影响,而且在励磁磁通额定值时可以获得快速的瞬态响应。同理,由于彼此解耦关系,在控制励磁电流时,也只影响励磁磁通,而不会影响电枢磁通。
异步电动机由于内在耦合关系,一般不会有较快的响应。若将异步电动机经坐标变换,放在同步旋转的参考坐标系上进行控制,如图4所示,异步电机模型就会变成直流电机模型:总的来说,电机接有A、B、C 三相导线,输入 iA、iB、iC三相定子电流,产生转子角速度ω,属于交流电机。分部分来看,由于坐标变换,异步电动机变成了由电流分量iT1和 iM1作为输入,ω作为输出的直流电机。
异步电动机经过矢量坐标变换后,定子电流被分解成相互垂直的两个量:直轴分量iM1和交轴分量iT1。直轴分量iM1用于控制转子磁通,称为磁通分量;交轴分量iT1用于调节电机转矩,称为转矩分量。异步电动机的两个控制变量在矢量控制下,iM1与直流电动机励磁电流If类似,iT1与直流电动机电枢电流Ia类似。因此异步电动机的转矩可表示为式(4),对比式(3),异步电机可等效为直流电机。

如果直轴分量iM1被定向在磁链的方向并且与交轴分量iT1相垂直。则异步电动机便可获得类似于直流电动机的特性。这就意味着当控制转矩分量iT1时,只会影响实际的电流iT1而不影响磁通分量。通过异步电机一系列的坐标变换便会获得直流电机特性,直流电机的控制方法就可以用于交流电机,获得直流电机调整量,再通过运算把坐标变回来,就实现了控制异步电机。因此,矢量控制的最终结果就是实现了定子电流分解,分别进行转子磁通和定子转矩的解耦控制,提高了调速的动态性能。
3 直接转矩控制
继矢量控制之后,1984年德国鲁尔大学的Depen Brock又提出了交流电动机的直接转矩控制方法,其特点是直接采用空间电压矢量,直接在定子坐标系下计算并控制电机的转矩和磁通;采用定子磁场定向,借助于离散的两点式调节产生PWM(空间矢量SPWM)直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能[8]。
和矢量控制不同,直接转矩控制摒弃了解耦的思想,取消了旋转坐标变换,简单的通过电机定子电压和电流,借助瞬时空间矢量理论计算电机的磁链和转矩,并根据与给定值比较所得差值,实现磁链和转矩的直接控制。在直接转矩控制中用异步电机定子侧参数计算出磁通和转矩,采用PWM信号直接控制逆变器的开关状态,对异步电机磁通和转矩直接进行自调整控制。
直接转矩控制的思路是将逆变器和电动机作为一个整体来考虑,它包含两层含义:一是保持定子总磁链基本恒定;二是对电机转矩进行直接控制。通过对逆变器的开关控制,一方面实现磁链的幅值控制,另一方面实现电动机转矩控制。
异步电动机定子磁链控制是通过控制电动机输入电压来实现的。当在三相异步电动机的定子绕组中通入对称的三相正弦交流电压时,将在电动机气隙中产生圆形轨迹的旋转磁场。如果牵引电动机通过三相逆变器供电时利用空间矢量概念,建立起逆变器开关模式及其输出电压与电动机磁链之间的关系。根据要跟踪的磁链空间矢量运动轨迹,选择逆变器的开关状态,使逆变器输出适当波形的电压。
空间矢量PWM是通过对电压矢量进行适当的切换控制,用尽可能多的多边形磁通轨迹来接近理想的磁通圆形轨迹。在空间矢量PWM控制下,电动机的输入电压完全取决于逆变器的开关动作状态模式,而电动机的磁通仅取决于电压模式。
直接转矩控制原理图如图5所示,在实际控制过程中,将测得的电机三相电压Us和三相电流Is送入计算器,计算出电机的定子磁链Ψs和电磁转矩T,分别与给定值Ψ*s和T*相比较,然后选择开关模式,确定PWM逆变器的输出。
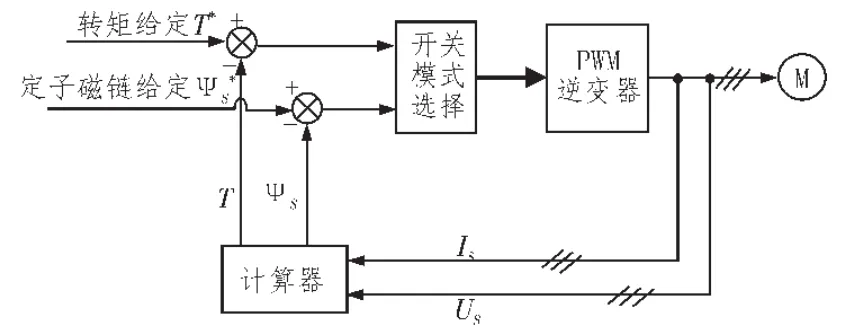
图5 直接转矩控制原理图
直接转矩控制的目标之一就是建立磁链和逆变器开关模式之间的关系,通过逆变器开关的空间矢量脉宽调制控制,或称磁链跟踪控制技术,使电动机获得一个准圆形的气隙旋转磁场。磁通轨迹越接近于圆形,引起的电流、转矩波动就越小,谐波损耗也越小。异步牵引电机的运行性能也就越好。
直接转矩控制方法控制思想简单,控制系统简洁明了,其控制系统动、静态性能优良。
4 结 论
以上几种电力机车变频调速的控制方法各有优劣,其中转差频率控制系统的被控制量是异步电动机的平均转矩,并未最终实现像直流电动机一样能对其转矩的瞬时值实行有效控制的目的,因此不太适用于电力机车的调速控制。
矢量控制和直接转矩控制方法则具有更多的优势,不同交流传动机车对这两种方法都各有应用,比如 HXD1、HXD1B、HXD2、HXD3 型电力机车等以及动车都采用矢量控制作为感应电机的控制系统。与传统的机车驱动控制系统的转差频率控制相比,矢量控制能够把感应电机的输出扭矩迅速地控制在目标值,从而提高对瞬时现象(如空转、滑行)的反应。
直接转矩控制方法简单直接,控制思想新颖特别,控制响应迅速,是一种高静态且动态性能优良的交流调速方法。但其在低速高开关频率区的性能比矢量控制差,目前我国开发的 HXD1C、DJ1、DJ2、AC4000、“中华之星”、“中原之星”、DF8BJ 等机车、动车和内燃机车都应用直接转矩控制技术。
[1]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[2]李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[3]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2000.
[4]李华德.交流调速控制系统[M].北京:电子工业出版社,2003.
[5]王树.变频调速系统设计与应用[M].北京:机械工业出版社,2005.
[6]Feng H C,Wang X D,Xu X Z,et al.Study on the Characteristics ofAsynchronous MotorVectorControl[J].Applied Mechanics and Materials,2013,273:434-438.
[7]Akira Onuki,Phase Transition Dynamics[M].Cambridge university press,2009.
[8]Yang A,Wu J,Zhang W,et al.Research on asynchronous motor vector control system based on rotor parameters time-varying [J].WSEAS Transactions on systems,2008,7(4):384-393.
[9]黄成荣.大功率交流传动机车驱动系统选型研究[J].机车电传动,2010(4):31-34.
[10]苟军善,侯康鹏.交流牵引电动机的发展态势[J].机车电传动,2011(3):1-5.
[11]冯晓云.电力牵引交流传动及其控制[M].北京:高等教育出版社,2009.
[12]冯江华.轨道交通永磁同步牵引系统研究[J].机车电传动,2010(5):15-21.
[13]李伟,郭晓燕,张波.“和谐”系列电力机车传动系统接地检测比较 [J].机车电传动,2010,10(6):67-74.
[14]北车集团大连机车车辆有限公司.HXD3交流传动电力机车培训教材[M].大连:北车集团大连机车车辆有限公司,2006.
The research on the AC drive electric locomotive speed control method
ZHU Ya-nan
(Dept.of Traction Power,Xi'an Railway Vocational&Technical Institute,Xi'an 710014,China)
In order to solve the difficulty that caused by various coupling factors of the AC drive electric locomotive speed control,this thesis system analysis and presentation of the practical AC speed regulation control method,including:slip frequency control,vector control and direct torque control.Consider with the actual situation of the AC locomotive speed control,analysis of the control mode suitable for AC locomotives:The vector control and the direct torque control method are superior to the slip frequency control method,and the performance of vector control method in low speed and high switching frequency region is more advantageous than the direct torque control method.It is very important for further understanding of AC electric locomotive speed control method.
AC speed regulation; slip frequency control; vector control; direct torque control
TN710
:A
:1674-6236(2017)14-0152-04
2016-06-22稿件编号:201606170
朱亚男(1986—),女,甘肃庆阳人,硕士,助教。研究方向:智能测控,电力电子技术。