机载极化阵列多输入多输出雷达极化空时自适应处理性能分析∗
2017-08-01王珽赵拥军赖涛王建涛
王珽 赵拥军 赖涛 王建涛
(信息工程大学导航与空天目标工程学院,郑州 450001)
机载极化阵列多输入多输出雷达极化空时自适应处理性能分析∗
王珽†赵拥军 赖涛 王建涛
(信息工程大学导航与空天目标工程学院,郑州 450001)
(2016年8月26日收到;2016年10月25日收到修改稿)
为进一步提升机载多输入多输出(MIMO)雷达空时自适应处理(STAP)的杂波抑制与目标检测性能,本文提出基于极化阵列MIMO雷达的极化空时自适应处理(PSTAP)方法.首先,将新型的极化阵列应用于机载MIMO雷达,建立了机载极化阵列MIMO雷达极化空时自适应处理的信号模型.然后,基于分辨格思想,将杂波影响等效为与杂波自由度相关的独立杂波点源的形式,得到极化阵列MIMO雷达极化空时自适应处理协方差矩阵的等价表示.进而,结合上述等价协方差矩阵,对极化阵列MIMO雷达极化空时自适应处理的输出信杂噪比(SCNR)性能进行了推导分析,讨论了其中极化、空、时匹配系数的影响.理论分析表明,通过利用附加的极化域信息,极化阵列MIMO雷达极化空时自适应处理相比于传统MIMO-STAP能够有效提升杂波抑制性能,更有利于慢速运动目标检测,并且目标与杂波极化参数差别越大,输出SCNR的性能改善效果越明显.仿真结果验证了本文所提极化阵列MIMO雷达极化空时自适应处理方法的有效性与优越性.
机载多输入多输出雷达,极化阵列,极化空时自适应处理,信杂噪比分析
1 引 言
受到多输入多输出(multiple-input multipleoutput,MIMO)技术在移动通信领域不断发展的启发[1-3],一种新兴的雷达体制——MIMO雷达在2003年应运而生[4,5].由于具有改善传统雷达性能的诸多潜力以及广泛的应用领域,MIMO雷达近年来受到了国内外军事界与学术界的持续关注[6-11].根据系统配置及信号处理方式的不同,当前学术界主要从两类MIMO雷达入手进行相关研究,即分布式MIMO雷达[6,7]与集中式MIMO雷达[8-10].其中分布式MIMO雷达收、发天线采用大间隔配置方式,能够实现对目标的多视角观测并获取充分的空间分集增益,从而显著提升对于闪烁目标的检测性能.而集中式MIMO雷达阵元采用较小间距的阵列配置形式,主要利用波形分集特性,通过匹配滤波后形成扩展的虚拟阵列孔径,适用于严格限制天线孔径与重量的机载平台,同时雷达的杂波抑制、参数估计等性能得到进一步增强[11].
1973年,Brennan和Reed[12]针对机载相控阵雷达的杂波抑制首次提出了空时自适应处理(space-time adaptive processing,STAP)技术.经过四十余年的探索和研究,STAP现已发展成为新一代机载预警雷达的核心技术,具有较为坚实的理论基础[13-17],并且在实际中能够达到地杂波抑制与地面动目标显示(ground moving target indication,GMTI)的目的.目前,STAP技术已能够较为系统完善地应用于实际装备的相控阵体制机载雷达之中,如美国最为先进的E-2D预警机中所装备的AN/APY-9雷达已采用STAP技术[16,17].
MIMO-STAP的概念最初由美国麻省理工学院(MIT)林肯实验室的Bliss和Forsythe[4]在2003年提出,机载MIMO雷达系统又与STAP技术实现有机结合,MIMO雷达STAP立即成为国际雷达界的研究热点之一[11,18-20].基于发射波形分集带来的系统自由度扩展,MIMO雷达STAP相比于传统机载相控阵雷达STAP性能大幅提升,杂波抑制、目标检测能力更加优越.但在空时主杂波区,当目标处于慢速运动状态时,其受杂波的影响依然十分严重,常规MIMO-STAP对于此类目标的检测存在困难.同时,极化空时自适应处理(PSTAP)为解决上述问题提供了一种新的思路[21-23],通过利用机载极化阵列形式,在空时域基础上进一步增加极化域信息,能够有效弥补常规STAP对杂波抑制能力的不足,慢速目标的检测能力得到显著改善.
作为电磁波的一个重要属性,当前极化信息的利用越来越受到研究者的重视[24-26].通过进一步挖掘信号的极化维度,获取更加充分的环境信息,并结合极化信息提升相关的信号处理性能,如今已成为信号处理的前沿领域.目前极化信息在MIMO雷达中的应用主要集中于极化角度估计[27-29]、极化检测等[30,31]方面,而针对MIMO-STAP方面尚未有相关研究.因此本文考虑在传统MIMO-STAP的基础上增加极化域信息进行联合处理,针对极化阵列MIMO雷达极化空时自适应处理的模型及性能进行研究,以获取性能突破.
针对上述问题及研究现状,本文提出基于机载极化阵列MIMO雷达的极化空时自适应处理方法.首先,建立了机载极化阵列MIMO雷达极化空时信号模型.其次,结合分辨格思想对极化空时协方差矩阵进行了等价表示.然后,基于该等效协方差矩阵,对极化阵列MIMO雷达极化空时自适应处理的输出信杂噪比(SCNR)进行了理论分析,表明其相比于传统MIMO-STAP在杂波抑制与目标检测方面的性能优势.最后,对本文提出的机载极化阵列MIMO雷达极化空时自适应处理方法的性能有效性及极化参数影响进行了仿真验证.
2 机载极化阵列MIMO雷达信号模型
图1给出了机载极化阵列MIMO雷达的系统结构模型.假设雷达载机沿X轴正方向飞行,飞行高度为H,飞行速度为va.各距离环中均匀分布杂波散射单元,方位角为θ,距离环俯仰角为φ,锥角为ψ.雷达在一次相干处理间隔(coherent processing interval,CPI)中存在K个相干脉冲,脉冲重复周期为T.极化阵列MIMO雷达位于载机正侧视位置,共含有M个发射阵元和N个接收阵元,阵元间距分别为dt=αλ/2和dr=λ/2(λ为雷达工作波长).发射阵元、接收阵元均为全向天线且均由双正交偶极子对构成,发射阵元发射水平/垂直(H/V)两种极化方式电磁波,接收阵元中偶极子对敏感接收相应的极化回波信息.
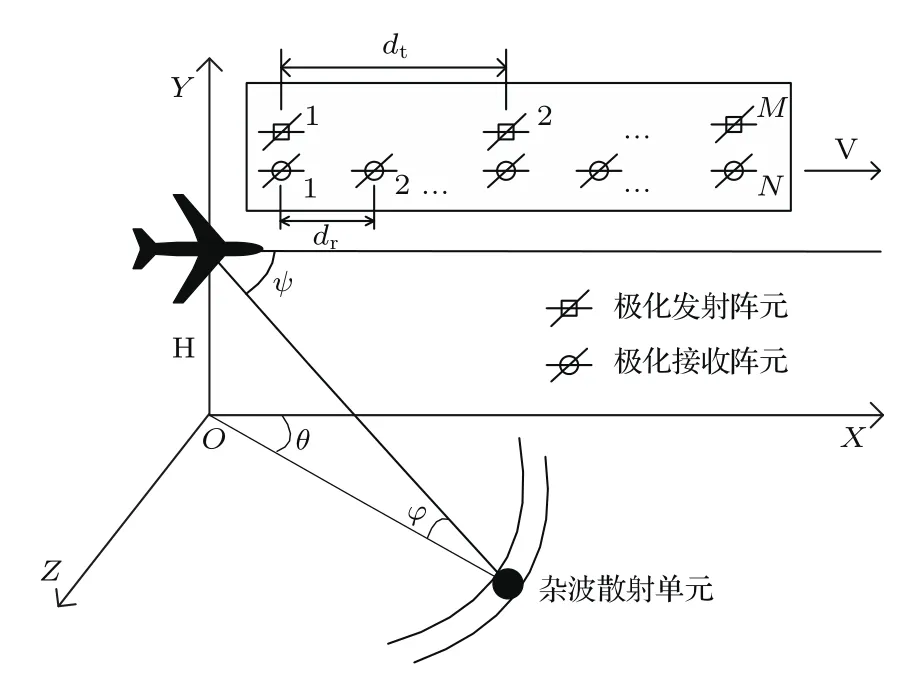
图1 机载极化阵列MIMO雷达系统结构图Fig.1.Configuration of airborne polarization array MIMO radar.
之后,通过利用MIMO雷达发射波形的正交性,在各接收阵元后利用各正交发射信号对H/V两路接收信号进行匹配滤波,共得到2MN×1路滤波输出信号.进一步,将各路滤波输出通过K段时域延迟线(时延为T),得到最终的极化空时信号,可以表示为如下2KMN×1维数据矢量形式:

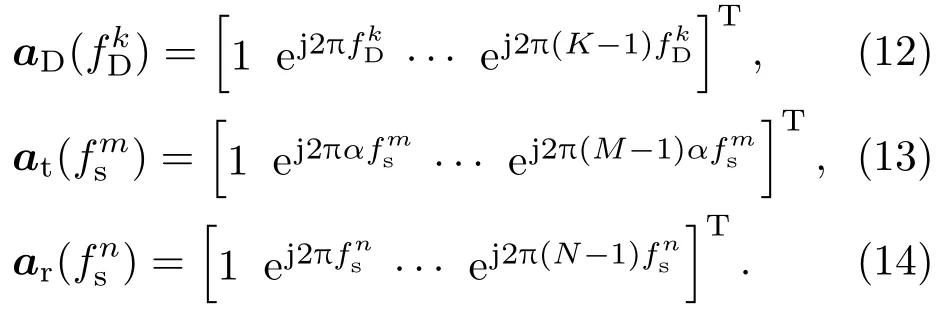
式中,c和n分别表示杂波和噪声矢量,ρ0为目标信号幅度,a0为2KMN×1维目标极化空时导向矢量,可以具体表示为

式中,⊗表 示Kronecker积,分别为极化、时域多普勒、空域发射、空域接收导向矢量,具体表示为
式中,(·)T表示转置;(γ0,η0)为极化参数,分别表示H/V两路目标信号的幅度比和相位差;表示目标归一化多普勒频率,其中2vaTcosθcosφ/λ为以速度va飞行的载机与目标相对运动而引入的多普勒频率,v0表示目标径向速度,表示目标归一化空间频率.
(1)式中,杂波矢量c由H通道和V通道两部分接收杂波构成,即可以表示为得到机载极化阵列MIMO雷达的极化空时杂波协方差矩阵为

式中,(·)H表示共轭转置,RS-T为空时杂波协方差矩阵,RP为极化杂波协方差矩阵,具体表示为
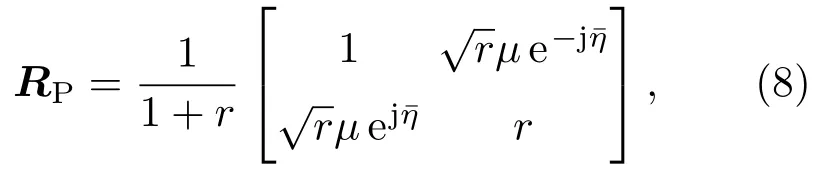
式中,r为V通道与H通道的平均功率比;µ为两通道杂波信号的相关系数,0≤µ≤1,µ=0时,杂波为完全未极化波,0<µ<1时,杂波为部分极化波,µ=1时,杂波为完全极化波[21,22];为两通道的统计平均相位差.
假设接收机噪声为零均值高斯白噪声,在空域与时域均相互独立,则总体上极化空时杂波加噪声协方差矩阵可以表示为
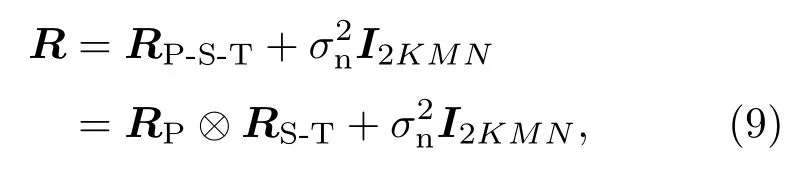
式中,I2KMN为2KMN×2KMN维单位阵,表示噪声功率.
针对机载极化阵列MIMO雷达,在已知极化空时杂波加噪声协方差矩阵R以及目标极化空时导向矢量a0的前提下,可以得到其最优极化空时权矢量为

进一步,得到机载极化阵列MIMO雷达极化空时自适应处理的最优输出信杂噪比为

式中,P0=|ρ0|2表示信号功率.机载极化阵列MIMO雷达极化空时自适应处理的基本原理如图2所示.
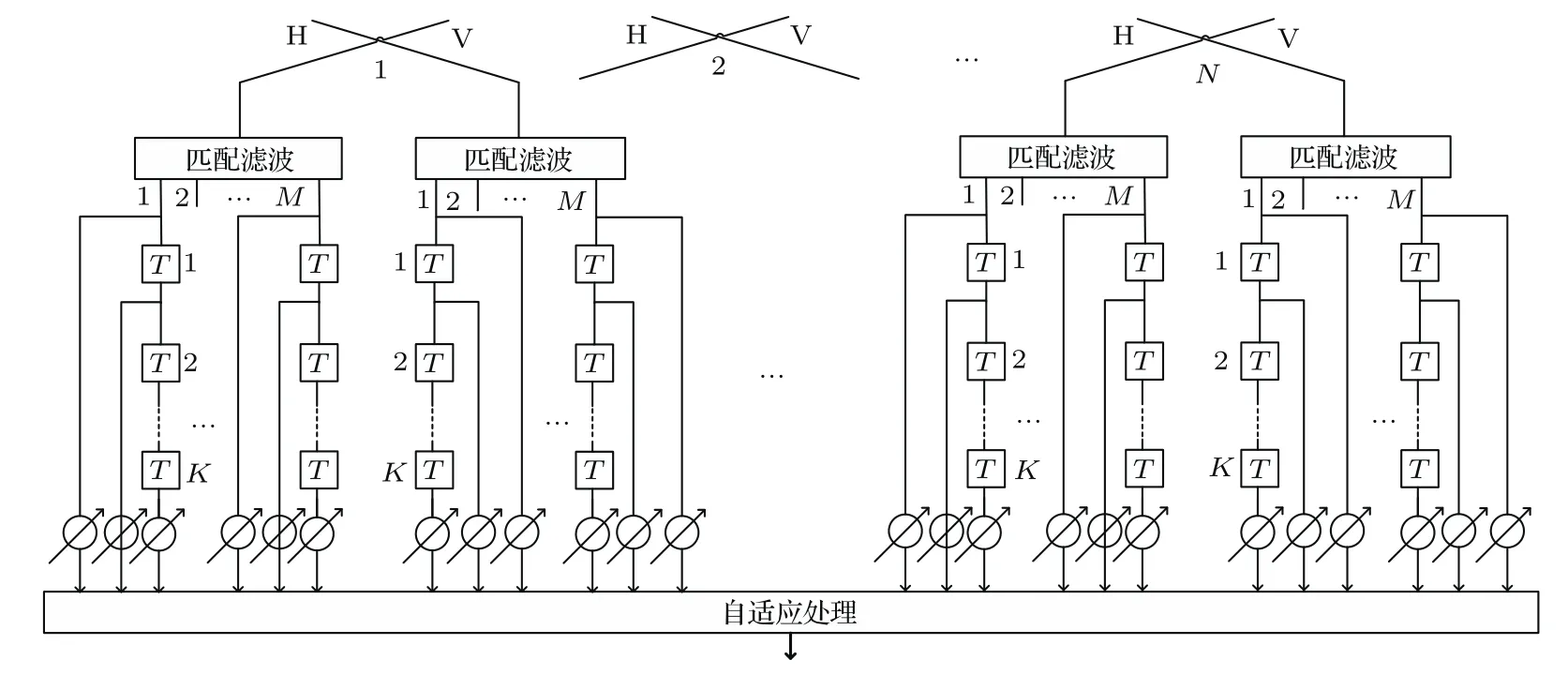
图2 极化阵列MIMO雷达极化空时自适应处理原理示意图Fig.2.Principle diagram of polarization array MIMO radar PSTAP.
3 极化阵列MIMO雷达极化空时自适应处理性能分析
3.1 基于分辨格思想的极化空时协方差矩阵等价表示
首先,根据波形分集特性,MIMO雷达可以在空域形成V=N+α(M-1)个虚拟阵元.同时,由文献[18],可以得到MIMO-STAP的杂波自由度为D=N+α(M-1)+β(K-1),式中β=2vaT/dr表示杂波脊斜率.可知,杂波自由度D的大小与参数(K,M,N,α,β)有关,斜率β由载机飞行速度va、脉冲重复周期T以及接收阵元间距dr决定.由于部分极化波可以通过特征分解,表示为两个正交的完全极化波[21],下面我们以完全极化波为例进行讨论.对于完全极化波,其极化协方差矩阵的秩为rank(RP)=1,即说明杂波可以分离为D个完全极化的杂波点源.基于与自由度相关的分辨格思想[32],则对于MIMOSTAP,可以在空时平面划分为KV个网格,如图3所示.各分辨格的中心频率为(-0.5+k/K,-0.5+[n+α(m-1)]/V),对应的矩形区域.根据极化空时杂波功率谱的分布特性,杂波能量主要集中在主极化矢量的杂波脊线上,即当杂波自由度为D时,表示杂波占据图3中沿脊线位置的D个分辨格[32],即将其视为等效杂波点源.同时各等效杂波点源对应的时域多普勒、空域发射和空域接收导向矢量可以表示为
假设待检测距离环中共有U个杂波块,则空时二维平面的杂波功率谱可以表示为

式中,δ(·)为单位脉冲函数,|ρu|2为第u个杂波块的功率,为第u个杂波块的归一化多普勒频率与空间频率,并且由于杂波的空时耦合效应,满足即该杂波功率谱沿斜率为β的脊线呈离散分布.
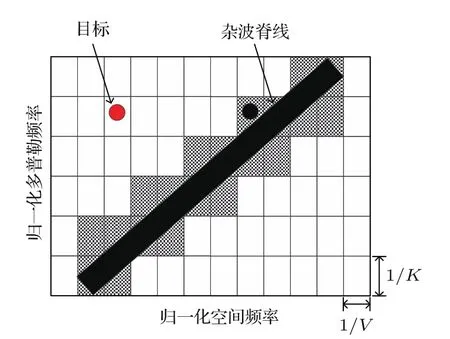
图3 空时分辨格示意图Fig.3.Schematic diagram of space-time resolution grid.
则第i个等效杂波点源对应的平均功率为

式中,Ai为第i个杂波点源对应的分辨格区域,S=1/(KV)为分辨格面积,i=1,2,···,D.
一般情况下,位于第i个杂波点源对应分辨格区域Ai内的杂波块个数确定,则(16)式可以转化为如下的离散求和形式:
式中,Ui为位置落入分辨格区域Ai的实际杂波块个数,ui=1,2,···,Ui,并且满足U1+U2+···+UD=U,i=1,2,···,D.若存在某一杂波块恰好位于两个分辨格区域相交边界,则可将其任意归入其中一个区域,而另一相邻区域则不重复计入.总体来说,(16)式与(17)式近似相等,误差可忽略不计,并且不影响后续分析.
利用分辨格思想进行合理简化,(9)式所示的极化空时协方差矩阵可以近似等价表示为
3.2 SCNR性能分析
基于上一节的分辨格思想,MIMO-STAP中的杂波影响可以等效为D个杂波点源的共同作用.本节在上述等价表示结果的基础上,对极化阵列MIMO雷达极化空时自适应处理的输出信杂噪比性能进行分析.由于SCNR求解涉及矩阵求逆,且直接对由D个杂波点源叠加合成的协方差矩阵求逆较为复杂,因此为便于分析,首先对单个等效杂波点源的情况进行研究.
对于单个杂波点源,其等价的极化空时杂波加噪声协方差矩阵可以表示为根据矩阵求逆引理[33],可以得到

式中,‖·‖表示向量2-范数,表示单个虚拟阵元单个脉冲的杂噪比.将(19)式代入(11)式,得到单个等效杂波点源条件下的最优输出信杂噪比为
式中,〈·,·〉表示内积,表示单个虚拟阵元单个脉冲的信噪比.
根据内积与Kronecker积性质[33],可以得到同时定义总体的阵列信噪比与阵列杂噪比分别为ASNRIN=KMN·SNRIN和ACNRIN=KMN·CNRIN.则(20)式可以进一步表示为
输出信杂噪比损失定义为输出信杂噪比与阵列总体信噪比之比,本文中表示为L=SCNRopt/ASNRIN.同时再次利用内积与Kronecker积性质[33],可以得到则根据(21)式,极化阵列MIMO雷达极化空时自适应处理的输出信杂噪比损失可以表示为

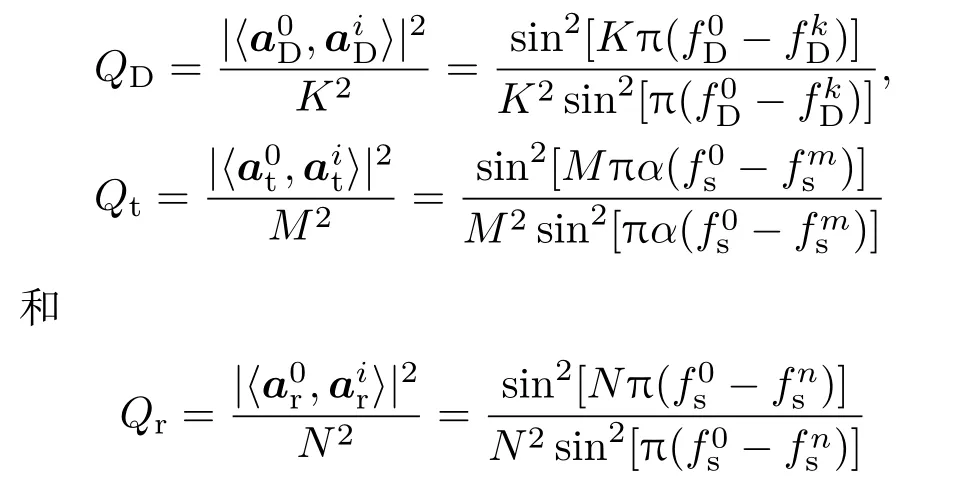
分别表示时域多普勒,空域发射和空域接收匹配系数.
下面考虑D个杂波点源叠加合成的情况,此时总的极化空时杂波加噪声协方差矩阵表示为

采用递推方法给出协方差矩阵RD求逆的表示形式为
进一步,基于上述协方差矩阵求逆的递推关系,将(23)式代入(11)式,得到D个等效杂波点源情况下最优输出信杂噪比的递推关系为
由(24)式所示的SCNR递推关系,表明SCNR随等效杂波点源个数的增加呈现递减关系,即随着杂波自由度的增加,SCNR性能进一步降低,符合常规STAP中的相关结论.
3.3 与常规MIMO-STAP性能比较
类似于上述推导过程,常规MIMO-STAP的信杂噪比损失可以表示为

对比(25)式与(22)式,可以发现,本文提出的极化阵列MIMO雷达极化空时自适应处理相比于常规MIMO-STAP增加了极化匹配项Qp,并且由于0≤Qp≤1,可以得到结论LS-T≤LP-S-T.对于中心频率为的等效杂波点源,当目标位于载机正侧视方向,即目标归一化空间频率目标与该杂波点源的空域发射、接收匹配系数均趋近于1,即有Qt≈1和Qr≈1.由于在正侧视目标方向下有cosψ=cosθcosφ≈0,载机相对运动引入的目标多普勒频率分量2vaTcosθcosφ/λ可忽略不计,因此目标归一化多普勒频率近似为即多普勒频率与目标速度v0直接呈正比关系.则目标速度越低,v0越接近于0,可直接体现为目标多普勒频率接近于0,而同时此处恰有等效杂波点源归一化多普勒频率从而表明当目标处于低速运动时,其与该杂波点源的时域多普勒匹配系数同样趋近于1,即有QD≈1.此时,对于传统MIMO-STAP,其信杂噪比损失LS-T≈0,即该杂波点源对于位于雷达正侧视位置的低速目标影响严重,无法从空时域进行目标检测.而此时,对于极化阵列MIMO雷达,其可以利用附加的极化匹配项Qp,根据极化信息差异消除中心杂波点源的影响,增大信杂噪比损失LP-S-T,并且受目标速度v0降低的影响显著减小,有利于检测慢速运动目标.进而,在阵列总体信噪比ASNRIN相同的情况下,可以进一步得到结论SCNRS-T≤SCNRP-S-T.通过以上理论分析表明,本文提出的极化阵列MIMO雷达极化空时自适应处理方法相比于传统MIMOSTAP具有更加优越的杂波抑制与目标检测性能.
4 仿真分析
仿真参数设置如下:极化阵列MIMO雷达载机高度H=8000 m,速度va=115 m/s,工作波长λ=0.23 m.收发阵列均为由双正交偶极子对阵元构成的极化阵列,其中极化发射阵元数M=4,发射阵元间距dt=0.46 m,极化接收阵元数N=4,接收阵元间距dr=0.115 m,α=N.时域脉冲数K=4,脉冲重复频率fr=2000 Hz,β=1.假定雷达检测方向为载机正侧视方向,即目标归一化空间频率为设置单个虚拟阵元单个脉冲的信噪比为SNRIN=0 dB,杂噪比为CNRIN=40 dB,同时假设H通道与V通道杂波功率相等,统计相位差为=90◦.
实验1有效性验证
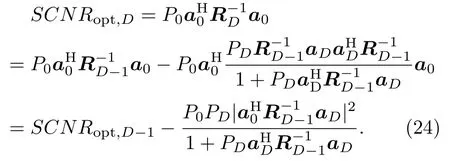
图4(a)给出了目标极化参数为(γ0,η0)=(15◦,90◦)时本文极化MIMO雷达极化空时自适应处理方法与常规MIMO-STAP输出SCNR随归一化多普勒频率的变化曲线,此时目标与杂波仅存在极化参数差异Δγ.图4(b)中目标极化参数假定为(γ0,η0)=(45◦,60◦),此时目标与杂波的极化差异存在于Δη.同时,两图中均给出了传统机载相控阵雷达及同样极化参数条件下的极化阵列相控阵雷达性能作为比较,除发射相干波形外,相控阵雷达系统配置与本文MIMO雷达相同,其中单个接收阵元单个脉冲的信噪比为SNRIN=0 dB,杂噪比为CNRIN=40 dB.可以看出,基于MIMO体制的相关处理性能均优于对应的相控阵体制,这主要得益于MIMO雷达波形分集特性带来的系统自由度提升.但对于慢速运动的目标,仅利用空时信息的常规MIMO-STAP将产生SCNR凹口,同样无法有效消除杂波的影响,实现目标检测.而本文提出的极化MIMO雷达极化空时自适应处理方法,可以通过利用任一极化参数的差异,使得SCNR的性能在低速目标区得到显著改善,符合第3节的理论分析结果.
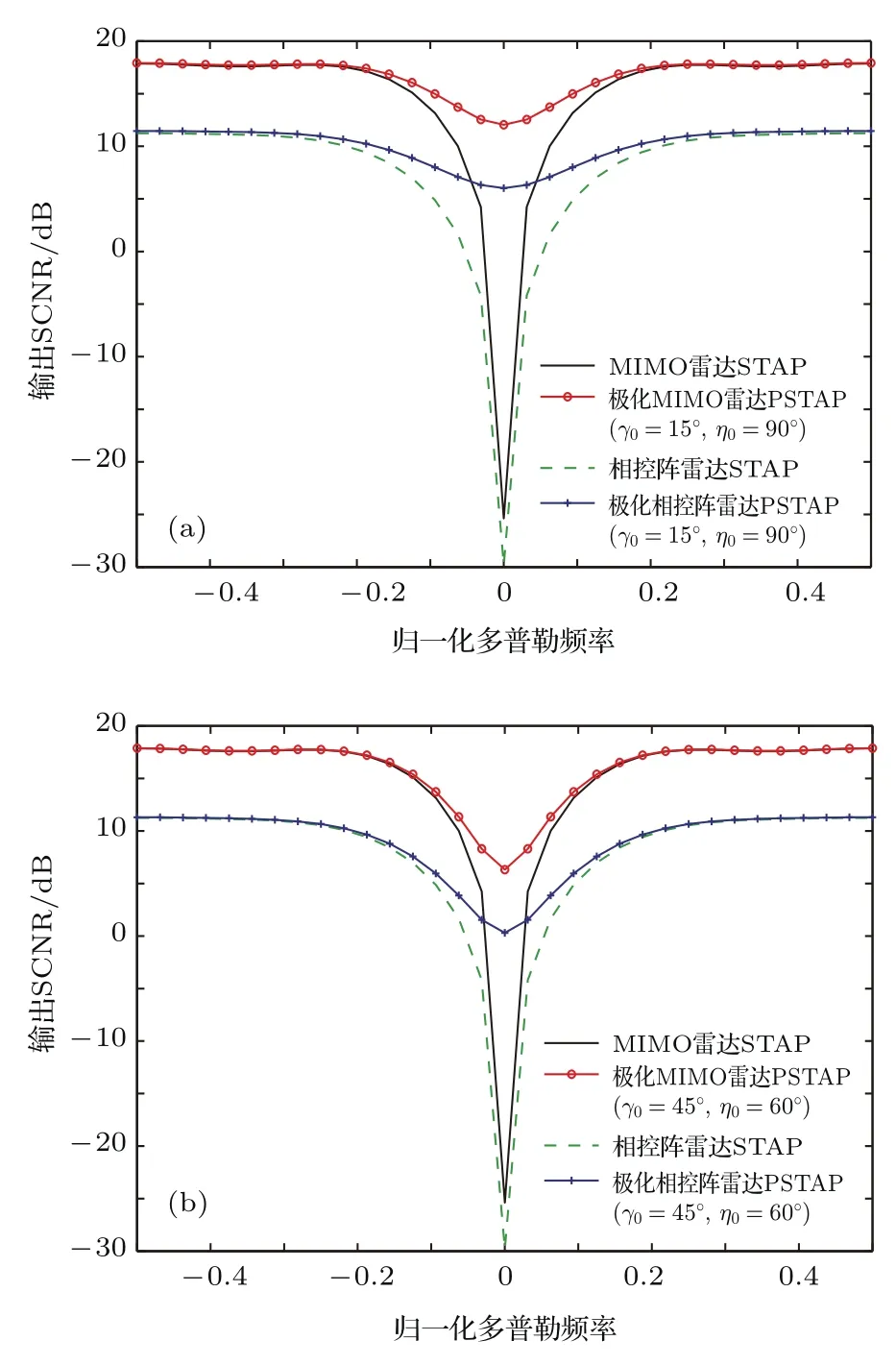
图4 (网刊彩色)输出SCNR随归一化多普勒频率的变化 (a) 目标极化参数(γ0,η0)=(15◦,90◦)时输出SCNR的性能;(b) 目标极化参数(γ0,η0)=(45◦,60◦)时输出SCNR的性能Fig.4.(color online)Output SCNRs versus different normalized Doppler frequencies:(a)Polarization parameters of target(γ0,η0)=(15◦,90◦);(b)polarization parameters of target(γ0,η0)=(45◦,60◦).
实验2极化参数影响
为进一步显示极化参数的影响,图5给出了不同目标极化参数条件下本文方法的输出SCNR的性能,其中图5(a)中固定极化参数η0=90◦,另一极化参数分别取γ0=(0◦,15◦,30◦,45◦); 图5(b)中,固定极化参数γ0=45◦,另一极化参数η0=(45◦,60◦,75◦,90◦). 从图中结果可以看出,当目标极化参数设置为(γ0,η0)=(45◦,90◦)时,相当于目标与杂波的极化特性无差别,本文方法输出SCNR性能与常规MIMO-STAP相同.而随着目标与杂波间极化参数差异Δγ或Δη的增大,与传统MIMO-STAP相比,本文方法的输出SCNR性能改善越明显,即表示杂波抑制效果越理想,尤其是对于慢速目标的检测能力显著增强.
图5 (网刊彩色)输出SCNR随归一化多普勒频率的变化 (a)极化参数γ0对输出SCNR性能的影响;(b)极化参数η0对输出SCNR性能的影响Fig.5.(color online)Output SCNRs versus different normalized Doppler frequencies:(a)Effect ofγ0;(b)effect ofη0.
图6进一步给出了本文方法输出SCNR随二维极化参数(γ0,η0)的变化曲线及其投影图,其中检测多普勒频率为即目标速度为11.5 m/s. 如图6所示,当极化参数为(γ0,η0)=(45◦,90◦)时,输出SCNR性能最差,即仅利用空时信息进行慢速目标检测的能力依然受限.对于其他极化参数条件下的同一多普勒频率目标,极化信息能够得到有效利用,并且目标极化参数与杂波极化参数差别(Δγ,Δη)越大,输出SCNR的提升程度越明显,更有利于抑制杂波与检测慢速目标,本文方法的有效性进一步得到验证.
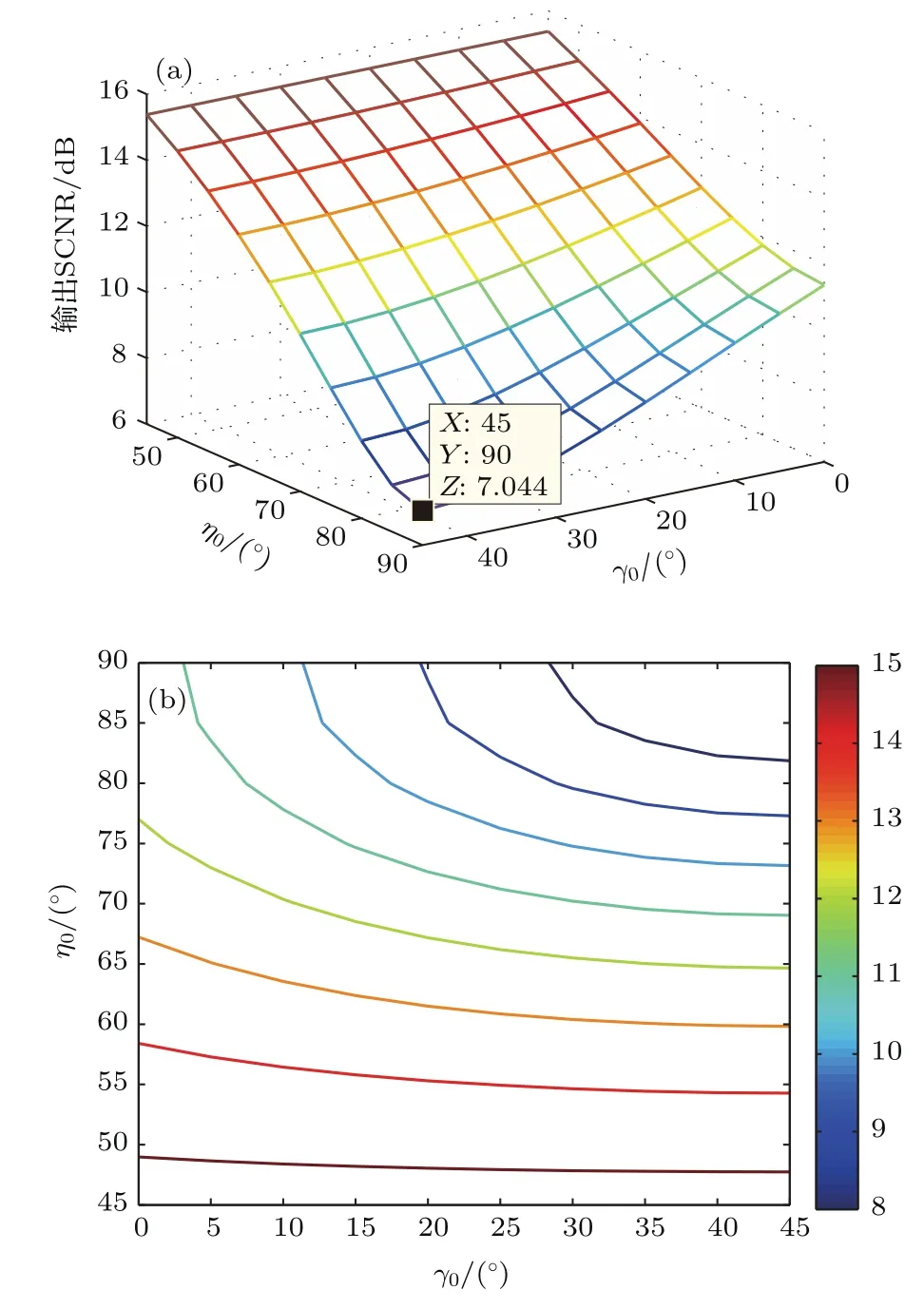
图6 (网刊彩色)输出SCNR随二维极化参数(γ0,η0)的变化 (a)二维极化参数(γ0,η0)对输出SCNR性能的影响;(b)输出SCNR在(γ0,η0)二维平面投影的示意图Fig.6.(color online)Output SCNRs versus polarization parameters(γ0,η0):(a)Effect of(γ0,η0);(b)twodimensional projection on(γ0,η0)plane.
5 结 论
本文将极化阵列这一新型阵列形式引入机载MIMO雷达,建立基于机载极化阵列MIMO雷达的极化空时自适应处理信号模型,同时依据分辨格思想等价表示出极化空时杂波加噪声协方差矩阵,之后进一步推导得到输出SCNR的表达形式与递推关系,并对其中极化、空、时匹配系数影响进行分析,从理论上表明了本文极化阵列MIMO雷达极化空时自适应处理方法相比于传统MIMO-STAP的性能优势.仿真实验结果进一步验证,通过利用目标与杂波的极化参数差异,本文方法能够获取更加优越的杂波抑制效果,更有利于低速运动目标的检测.因此,本文提出的极化阵列MIMO雷达极化空时自适应处理方法具有重要的实际工程应用价值.
参考文献
[1]Yang Y,Wang B Z,Ding S 2016Chin.Phys.B25 050101
[2]Du Z C,Tang B,Liu L X 2006Chin.Phys.15 2481
[3]Hai L,Zhang Y R,Pan C L 2013Acta Phys.Sin.62 238402(in Chinese)[海凛,张业荣,潘灿林2013物理学报62 238402]
[4]Bliss D W,Forsythe K W 2003Proceedings of 37th Asilomar Conference on Signals,System,and ComputersPacific Grove,USA,November 9-12,2003 p54
[5]Fishler E,Haimovich A,Blum R S,Chizhik D,Cimini L J,Valenzuela R 2004Proceedings of IEEE Radar ConferencePhiladelphia,USA,April 26-29,2004 p71
[6]Fishler E,Haimovich A,Blum R S,Cimini L J,Chizhik D,Valenzuela R 2006IEEE Trans.Signal Process.54 823
[7]Haimovich A,Blum R S,Cimini L J 2008IEEE Signal Process.Mag.25 116
[8]Li J,Stoica P 2007IEEE Signal Process.Mag.24 106
[9]Wen F Q,Zang G,Ben D 2015Chin.Phys.B24 110201
[10]Huang C,Sun D J,Zhang D L,Teng T T 2014Acta Phys.Sin.63 188401(in Chinese)[黄聪,孙大军,张殿伦,滕婷婷2014物理学报63 188401]
[11]Wang T,Zhao Y J,Hu T 2015J.Radars4 136(in Chinese)[王珽,赵拥军,胡涛 2015雷达学报4 136]
[12]Brennan L E,Reed I S 1973IEEE Trans.Aerosp.Electron.Syst.9 237
[13]Guerci J R 2003Space Time Adaptive Processing for Radar(Norwood,MA:Artech House,Inc.)pp3-55
[14]Klemm R 2002Principles of Space-Time Adaptive Processing(London:The Institution of Electrical Engineers)pp2-45
[15]Wang Y L,Peng Y N 2000Space-Time Adaptive Processing(Beijing:Tsinghua University Press)pp1-9(in Chinese)[王永良,彭应宁 2000空时自适应信号处理 (北京:清华大学出版社)第1—9页]
[16]Wang Y L,Li T Q 2008J.China Acad.Electron.Inf.Technol.3 271(in Chinese)[王永良,李天泉2008中国电子科学研究院学报3 271]
[17]Zhang L,Xu Y G 2015Modern Radar37 1(in Chinese)[张良,徐艳国2015现代雷达37 1]
[18]Chen C Y,Vaidyanathan P P 2008IEEE Trans.Signal Process.56 623
[19]Wang W,Chen Z,Li X,Wang B 2016IET Radar Sonar Navig.10 459
[20]Zhang W,He Z S,Li J,Li C H 2015IET Radar Sonar Navig.9 772
[21]Wu D J,Xu Z H,Zhang L,Xiong Z Y,Xiao S P 2012Prog.Electromagn.Res.129 579
[22]Wu D J,Xu Z H,Xiong Z Y,Zhang L,Xiao S P 2012Acta Electron.Sin.40 1430(in Chinese)[吴迪军,徐振海,熊子源,张亮,肖顺平2012电子学报40 1430]
[23]Du W T,Liao G S,Yang Z W,Xin Z H 2014Acta Electron.Sin.42 523(in Chinese)[杜文韬,廖桂生,杨志伟,辛志慧2014电子学报42 523]
[24]Zhao X B,Yan W,Wang Y Q,Lu W,Ma S 2014Acta Phys.Sin.63 218401(in Chinese)[赵现斌,严卫,王迎强,陆文,马烁2014物理学报63 218401]
[25]Xu Y G,Xu Z W,Gong X F 2013Signal Processing Based on Polarization Sensitive Array(Beijing:Beijing Institute of Technology Press)pp1-21(in Chinese)[徐友根,刘志文,龚晓峰 2013极化敏感阵列信号处理 (北京:北京理工大学出版社)第1—21页]
[26]Wang X S 2016J.Radars5 119(in Chinese)[王雪松2016雷达学报5 119]
[27]Gu C,He J,Li H,Zhu X 2013Signal Process.93 2103
[28]Zheng G M,Yang M L,Chen B X,Yang R X 2012J.Electron.Inf.Technol.34 2635(in Chinese)[郑桂妹,杨明磊,陈伯孝,杨瑞兴2012电子与信息学报34 2635]
[29]Wang K R,Zhu X H,He J 2012J.Electron.Inf.Technol.34 160(in Chinese)[王克让,朱晓华,何劲2012电子与信息学报34 160]
[30]Li N,Cui G,Kong L,Liu Q H 2015IET Radar Sonar Navig.9 285
[31]Gogineni S,Nehorai A 2010IEEE Trans.Signal Process.58 1689
[32]Wu Y,Tang J,Peng Y N 2011IEEE Trans.Aerosp.Electron.Syst.47 569
[33]Zhang X D 2013Matrix Analysis and Applications(Second Edition)(Beijing:Tsinghua University Press)pp26-72(in Chinese)[张贤达 2013矩阵分析与应用(第2版)(北京:清华大学出版社)第26—72页]
PACS:84.40.Xb,43.60.Gk,42.25.Ja DOI:10.7498/aps.66.048401
Performance analysis of polarization-space-time adaptive processing for airborne polarization array multiple-input multiple-output radar∗
Wang Ting†Zhao Yong-Jun Lai Tao Wang Jian-Tao
(School of Navigation and Aerospace Target Engineering,Information Engineering University,Zhengzhou 450001,China)
26 August 2016;revised manuscript
25 October 2016)
In order to further improve the capabilities of clutter suppression and target detection in airborne multiple-input multiple-output(MIMO)radar space-time adaptive processing(STAP),the polarization-space-time adaptive processing(PSTAP)method based on polarization array MIMO radar is proposed.Firstly,by applying the novel polarization array to airborne MMO radar,the signal model of airborne polarization array MIMO radar PSTAP is established.Then based on the idea of resolution grid,the influence of clutter can be equivalent to the formation of independent point sources of clutter related to the clutter degree of freedom,and an equivalent expression for the covariance matrix in polarization array MIMO radar PSTAP is obtained.Next,combined with the equivalent covariance matrix,the signal-to-clutter-plusnoise ratio(SCNR)performance of the polarization array MIMO radar PSTAP is derived and analyzed.The effects of the polarization,spatial and temporal matching coefficients are discussed.When the target is located in the side-looking direction of the airborne radar,the normalized spatial frequency of the target is zero.Then the spatial transmit and spatial receive matching coefficients between the target and the clutter point source in the center of the space-time plane both approach to one.Meanwhile,the normalized Doppler frequency of the side-looking target is in direct proportion to the target speed.When the target speed decreases to zero,the temporal Doppler matching coefficient between the target and the central clutter source is near to one.Thus taking the spatial and temporal matching coefficients into consideration,the SCNR loss of the traditional MIMO-STAP is approximate to zero.It indicates that for traditional MIMO-STAP,its performance of detecting low-speed target is severely degraded by the clutter source,and target detection can hardly be realized just in space-time domains.However,through utilizing the additional polarization information to take advantage of the polarization matching coefficient,the polarization array MIMO radar PSTAP increases the SCNR loss and remarkably lessens the influence of the central clutter source.According to the above theoretical analysis,we can come to the conclusion that the polarization array MIMO radar PSTAP can effectively promote the capability of clutter suppression compared with the traditional MIMO-STAP,which is beneficial to the detection of the moving target with low-speed.Moreover,the improvement of output SCNR performance becomes more significant with increasing the differences between the polarization parameters of target and those of clutter.Therefore,the polarization array MIMO radar PSTAP has great application value for practical engineering.The simulation results verify the validity and superiority of the proposed polarization array MIMO radar PSTAP method.
airborne MIMO radar,polarization array,polarization-space-time adaptive processing,analysis of signal-to-clutter-plus-noise ratio
:84.40.Xb,43.60.Gk,42.25.Ja
10.7498/aps.66.048401
∗国家自然科学基金(批准号:61501513,41301481)资助的课题.
†通信作者.E-mail:wangtingsp@163.com
*Project supported by the National Natural Science Foundation of China(Grant Nos.61501513,41301481).
†Corresponding author.E-mail:wangtingsp@163.com
